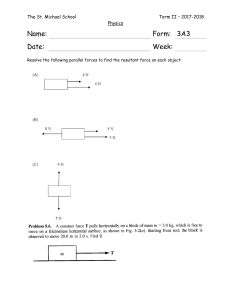
MODULE: 1 Introduction to Engineering Mechanics. Engineering Mechanics is a subject which deals with the static and dynamic behavior of objects acted upon by forces. Mechanics is broadly divided into two divisions. 1. Statics (Body is at rest or equilibrium) 2. Dynamics (Moving bodies with an acceleration) Dynamics divided into two major areas. 1. Kinematics (Studying moving bodies without considering the force producing motion) Three equations of kinematics eg, v=u+at. Force is not considered in all the three. 2. Kinetics (Studying moving bodies while considering the force producing motion) Eg, equation of motion f=ma. Force is considered. Statics. Force: An action that changes or tends to change the state of rest or uniform motion of a body. P – Pushing force / F(f) – Frictional force Rigid body: A body which will neither deform nor deflect under action of a force. Deflection delta For a rigid body, deflection will be zero. Principles of Statics. 1. Parallelogram Law. Force specifications: 1. Magnitude 2. Direction 3. Point of Application (starting point or end point) If two forces, represented by vectors AB and AC, acting under an angle α are applied to a body at point A, their action is equivalent to the action of one force, represented by the vector AD, obtained as the diagonal of the parallelogram constructed on the vectors AB and AC and directed as shown in the figure. AD is resultant of AB and AC. AB and AC are called components of AD. Instead of constructing the parallelogram of forces, the resultant can be obtained also by constructing the triangle ACD as shown in figure. Statement of parallelogram law: If two forces acting at a point can be represented in magnitude and direction by the adjacent sides of a parallelogram then the diagonal of the parallelogram will give their resultant in both magnitude and direction. Length of the diagonal gives the magnitude of resultant. Point O is the point of application of the two forces. MAGNITUDE DIRECTION Can be found either by graphical method or analytical method. Resultant: It is that single force which if acts alone will produce the same effect as the combined effect of all other forces. Equilibrant: It is that single force which if acts along with the other forces will keep the body in equilibrium. “Resultant and equilibrant are equal and opposite.” Force system: When more than one force acts on a body, all those forces combined is called a force system. 2. Equilibrium of two forces. Nature of a force: Tensile(pulling) force or Compressive(pushing) force. The forces are collinear but non-parallel. Principle of equilibrium of two forces: Two non-parallel coplanar forces acting on a body will keep the body in equilibrium only if the two forces are equal and opposite. 3. Principle of super-position. The effect of a system of forces acting on a body will in no way be changed if we add to or subtract from the force system another force system which is in equilibrium. 4. Principle of Transmissibility A force can be shifted to anywhere along its line of action provided the point of application of the force remains attached to the body. 5. Law of action and reaction Action and reaction are equal and opposite. (Initially this principle was meant for statics, for stationary bodies. Then Newton extended it for moving bodies also, naming it as his Third Law). Action: Force exerted by a body on its support. Reaction: Force exerted by the support on the body. Free body diagram. It is a diagram obtained by removing a body from its supports and showing all forces acting on the body including self-weight and reactions from the supports. Types of supports and number of reactions. Constraint: If a body is prevented from moving in any particular direction, then we say that there is a constraint in that direction. In whichever direction there is a constraint there will be a reaction in that direction. This criterion is used to know the number of reactions that will be present. 1. Smooth surface: There is no friction. 2. String support. There will be only one reaction, that will be along the string. 3. Roller support. There will only one reaction, that will be acting perpendicular to the surface on which the roller is resting. 4. Hinge support (Pin support). There will be two reactions, one horizontal and the other vertical. A beam that is supported at one end on a hinge and other end on a roller is known as Simply Supported beam. 5. Fixed support. (Built-in support) There will be three reactions, one vertical reaction, one horizontal reaction, and one moment reaction. Beam fixed at one end and free at the other end is called a Cantilever. Eg: Sunshade. (Chapters in statics: 1. 2. 3. 4. 5. Basic concepts Concurrent coplanar forces + Friction Parallel coplanar forces General coplanar forces Force systems in space Analysis 1: Given a force system, determine the resultant. (Solving problems) Analysis 2: A force system is given which is in equilibrium; a few forces of the force system are unknown; determine the unknown forces. (Solving problems). Using Equilibrium Equations. ) Concurrent: Forces meet at one point. Coplanar: Forces lying in same plane. Equilibrium: Resultant=0. Concurrent coplanar forces. Theorem of three forces: Three non-parallel coplanar forces acting on a body shall keep the body in equilibrium only if the three forces are concurrent. Analysis 1: a. Method of projections b. Method of moments Method of projections Projection of a force If a force is tensile, its components will also be tensile. If a force is compressive, its components will also be compressive. Principle of Method of Projections. (Imp) Suppose a number of concurrent coplanar forces are given as F1, F2, F3, etc, Fn. Then x-component of resultant i.e., Rx=F1x+F2x+…. +Fnx= Σ Fix. Similarly, the y-component of resultant i.e., Ry=F1y+F2y+…. +Fny= Σ Fiy. (Type 1 problems) Method of Moments Effect of a force to produce rotation of a body about a point is called moment. The point with respect to which moment is calculated is called Moment centre (MC). The perpendicular distance between line of action of force and moment centre is known as moment arm (MA). Moment, M = P x MA Unit: N-m. Nature of moment – Clockwise or Anti-clockwise. Clockwise = -ve Anti-clockwise = +v Varignon’s theorem of moments. (Imp) Moment of the resultant of a system of concurrent coplanar forces about any point in its plane will be equal to the algebraic sum of the moments of the component forces about the same point. Moment of the resultant = Sum of moments of the component forces. Varignon’s theorem is mainly used for solving type 2 problems. In type 2 problem, resultant is zero. Therefore, moment of the resultant is also zero. Sum of moments of the component forces = 0.