See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/239405192
LPV Model Based Gain-scheduling Controller for a Full Vehicle Active
Suspension System
Article in Journal of Vibration and Control · November 2007
DOI: 10.1177/1077546307078784
CITATIONS
READS
39
1,204
4 authors, including:
Cem Onat
Ibrahim B. Kucukdemiral
Firat University
Glasgow Caledonian University
40 PUBLICATIONS 402 CITATIONS
55 PUBLICATIONS 363 CITATIONS
SEE PROFILE
SEE PROFILE
Selim Sivrioglu
Antalya Bilim University
91 PUBLICATIONS 967 CITATIONS
SEE PROFILE
Some of the authors of this publication are also working on these related projects:
Otomatik Yüklemeli Kömur Kazanlarında Görüntü İşlemeli Adaptif Kontrol Tasarımı View project
PZT Smart Beam View project
All content following this page was uploaded by Selim Sivrioglu on 02 October 2014.
The user has requested enhancement of the downloaded file.
Journal of Vibration and Control
http://jvc.sagepub.com
LPV Model Based Gain-scheduling Controller for a Full Vehicle Active Suspension System
Cem Onat, Ibrahim B. Kucukdemiral, Selim Sivrioglu and Ismail Yuksek
Journal of Vibration and Control 2007; 13; 1629
DOI: 10.1177/1077546307078784
The online version of this article can be found at:
http://jvc.sagepub.com/cgi/content/abstract/13/11/1629
Published by:
http://www.sagepublications.com
Additional services and information for Journal of Vibration and Control can be found at:
Email Alerts: http://jvc.sagepub.com/cgi/alerts
Subscriptions: http://jvc.sagepub.com/subscriptions
Reprints: http://www.sagepub.com/journalsReprints.nav
Permissions: http://www.sagepub.com/journalsPermissions.nav
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV Model Based Gain-scheduling Controller for a
Full Vehicle Active Suspension System
CEM ONAT
Department of Mechanical Engineering, Inonu University, Malatya, Turkey
IBRAHIM B. KUCUKDEMIRAL
Department of Electrical Engineering, Faculty of Electrical – Electronic Engineering, Yildiz
Technical University, 34349, Besiktas, Istanbul, Turkey (beklan@yildiz.edu.tr)
SELIM SIVRIOGLU
Department of Energy Systems, Gebze Institute of Technology, Gebze, Kocaeli, Turkey
ISMAIL YUKSEK
Department of Mechanical Engineering, Faculty of Mechanical Engineering, Yildiz Technical
University, 34349, Besiktas, Istanbul, Turkey
(Received 22 March 20061 accepted 6 February 2007)
Abstract: This article addresses the design of a gain-scheduling type nonlinear controller for a full-vehicle
active suspension system. The proposed method is based on a Linear Parameter Varying (LPV) model of
the system. In this model, the variations in suspension deflection and mass are chosen as the scheduling
parameters. During the simulations, the full-vehicle system that is controlled by the proposed method is tested
with different road profiles, having high and low bumps, hollows and combinations of the two. The simulation
results demonstrate that the proposed method successfully maximizes the ride comfort when suspension
deflection is far away from the structural limits and minimizes the suspension deflection by changing its
behavior when the suspension limits are reached.
Key words: LPV systems, active suspension control, gain-scheduling control.
1. INTRODUCTION
Over the past two decades, the use of active suspension in commercial vehicles has become
a subject of interest for both academics and industry. Active suspension systems are used
to provide ride comfort by isolating the vehicle chassis from harmful vibrations without
sacrificing road holding performance.
Vehicles, considering their body, axes, rotational and translational joints, constitute a
complex vibration system when exposed to bumpy road conditions and external aero-dynamical forces. In particular, the external effects originating from the rough road conditions lead
to noise and uncomfortable ride problems within the vehicle body. Every vehicle system
Journal of Vibration and Control, 13(11): 1629–1666, 2007
1
12007
SAGE Publications Los Angeles, London, New Delhi, Singapore
DOI: 10.1177/1077546307078784
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1630 C. ONAT ET AL.
can be modeled as a multi-massed complex dynamical system, where the complexity of the
model depends on the required objective. Among these models, two degree of freedom (DoF)
quarter vehicle models are widely used to analyze the vertical vibrations while a 4-DoF half
vehicle model is generally used to analyze both the vertical, translational behavior and the
pitching of the vehicle. Finally, a 7-DoF full vehicle model is preferred when analyzing the
yawing dynamics of the vehicle in addition to the vertical and pitching motions.
Unlike traditional passive suspensions, active suspension systems include a feedbackcontrolled hydraulic actuator, which is mounted between the vehicle chassis and wheel assembly. In classic passive suspension design, ride comfort and road handling are conflicting
design criteria (in order to increase the ride comfort, i.e., decrease the acceleration of chassis, one must use low stiffness suspension which leads to worsened road handling). Active
suspension can overcome this problem, but causes another conflict between the ride comfort
and the suspension travel. Structural features of suspension systems place a hard limit on
their travel. Striking these limits causes not only discomfort to the passengers but also damage to the vehicle. Therefore, an advanced active suspension controller must be designed as
a multi-objective system.
Many linear and nonlinear control methods for active suspension systems have been
proposed, such as Linear Quadratic Regulator (LQR) control (Hrovat, 19971 Krtolica and
Hrovat, 1992), H 2 control (Wang and Wilson, 20011 Gaspar et al., 20031 Chen and Guo,
2005), nonlinear control (Alleyne and Heydrick, 19951 Sam et al., 20041 Yoshimura et al.,
2001) and fuzzy logic control (D’Amato and Viassolo, 2000). However, an active suspension
controller that is designed by using these methods can only conduct a tradeoff between the
ride comfort and suspension deflection performance criteria. Only a nonlinear controller such
as a gain scheduling control can focus on the ride comfort and suspension deflection performances at the same time. Gain scheduling controllers are nonlinear controllers that operate
by smoothly switching between local linear controllers. The popularity of these techniques
has much increased in the last decade, and they have been widely applied in fields ranging
from process control to military applications (see, e.g., Becker and Packard, 19941 Biannic
and Apkarian, 19991 Fialho and Balas, 20001 Fujisaki et al., 20031 Bianchi et al., 2005).
In this article, a robust Linear Parameter Varying (LPV) based gain scheduled controller
is presented that is responsive to both vehicle mass variations and suspension deflections. The
motivation behind choosing the vehicle mass variation as the second scheduling parameter is
that suspensions are most often damaged when the vehicle is fully loaded and exposed to bad
road conditions. Under these circumstances, the probability of the suspension rod hitting its
structural limits is very high. On the other hand, much lighter vehicles are likely to be produced in near future as a consequence of the rapid improvements in the automotive industry.
The proportional mass variations of these vehicles will be much greater than those of vehicles produced today. Thus, using the mass variation as a scheduling parameter may increase
the effectiveness of the controller in protection of the suspension system from damage.
The motivation of this article is to design a controller that is sensitive to both vehicle
mass variation and suspension deflection. The controller focuses on minimizing the body
acceleration when the suspension deflections are acceptably small and stiffens when the
suspension deflection becomes large, in order to prevent it from hitting the structural limit. A
similar method was used by Fialho and Balas (2000). However, they applied the method to a
linear quarter car system where the only scheduling parameter was the suspension deflection.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1631
Later (Fialho and Balas, 2002), an LPV based gain scheduled controller was addressed to
the dynamics of a 2-DoF linear vehicle model with a hydraulic transducer, utilizing road
roughness and suspension deflection as a programming parameter vector. By choosing the
road roughness as a scheduling parameter, the controller acquires the ability to adapt to
different road conditions.
This article presents a novel approach to the design of gain-scheduling controllers for
active suspension. The proposed method is based on a Linear Parameter Varying (LPV)
model of a full vehicle system where the scheduling parameters are the maximum suspension
deflection of the four wheels and the mass of the vehicle body. The validity of the proposed
controller is tested on a nonlinear model of the system. The motivation behind choosing the
maximum suspension deflection is to prevent the suspension rods from hitting the structural
limits by always considering the worst case. It is well known that if one of the suspension
rods is damaged, this can cause instability of the vehicle dynamics, potentially leading to
dangerous situations, especially when the vehicle speed is high. On the other hand, when
one of the front wheels hits a bump, it is likely that the rear wheel on the same side will hit
the same bump after a very short period. By using a controller that utilizes the maximum suspension deflection of the four wheels, the system behaves like a model predictive controller
and stiffens the rear suspension system before it reaches the bump.
Our goal is to obtain a multi-objective controller that smoothly switches between different local controllers depending on the current situation of the system. The controller must
be designed so that it improves ride comfort when the suspension deflections are within
their physical limits but prioritizes the suspension deflection minimization problem when
the physical limits are reached. Between these two extreme conditions, the controller’s behavior depends on the weighting filters. Also, it is imperative that the performance of the
controller should not be influenced by the variation in the mass of the vehicle. When the
road inputs to the vehicle are considered as finite energy disturbances and the performance
outputs as finite energy functions, the disturbance rejection problem can be considered as an
L2 optimization problem.
The rest of the article is organized as follows: Nonlinear model of the system is addressed
in Section 2, Section 3 presents the design of the LPV based gain-scheduling controller for
the full vehicle model, Section 4 discusses the simulation results for the proposed method
and Section 5 contains our conclusions.
The notation of the article is fairly standard. MT is the transpose of matrix M. For symmetric matrices M 1 0 means M is positive definite. I is for the identity matrix and [0]n3m
is the n by m null matrix.
2. NONLINEAR FULL VEHICLE MODEL AND LINEARIZATION
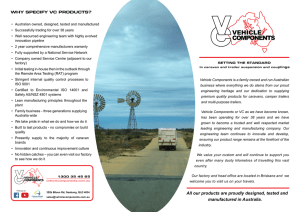
Nonlinearities in vehicle model dynamics generally stem from nonlinear suspension damping characteristics, hardening suspension spring characteristics and the trigonometric expressions in the model. In this article, the full vehicle model (shown in Figure 1) is used in the
derivation of the LPV based active suspension control law. This model is widely used in the
literature because it reflects the full characteristics of a vehicle. Here, T 1 and T 2 are the distances of the center of mass of the vehicle from the right and left wheel track, respectively,
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1632 C. ONAT ET AL.
Figure 1. 7-DoF vehicle model.
and L1 and L2 are the distances of the center of mass of the vehicle from the front and rear
ends, respectively. {ci 4 i = 1, . . . , 4} are the damping coefficients of each wheel’s suspension, {ki 4 i = 1, . . . , 4} are the related spring constants, and {ki 4 i = 5, . . . , 8} represent the
tire stiffness of each wheel. {ci 4 i = 1, . . . , 4} denote the control forces of (in order) the front
right, front left, rear left and rear right active elements, m1 is the mass of the vehicle body,
J 2 is the inertia of the pitch motion of the vehicle body with respect to the y-axis, and J 3 is
the inertia for the roll motion of the vehicle with respect to the z-axis. m4 , m5 , m6 , and m7 are
the masses of the suspensions and tires, v is the velocity of the vehicle, and 2 and 3 are the
pitch and yaw angles of the vehicle body. {xri 4 i = 1, . . . , 4} are the vertical position vectors
of the contact points of the wheels with the road for the front right, front left, rear left and
rear right wheels (in that order). The dynamic equations of the 7-DOF nonlinear vehicle are
obtained using Lagrange equations1 the dynamics of the vehicle are expressed by equations
(1) to (7):
1
x51 6
25
1
6
1
35 6
71
m1
71
J2
71
J3
2
4 f s1 8 f s2 8 f s3 8 f s4 7 u 1 7 u 2 7 u 3 7 u 4 5 6
(1)
2
4L 1 f s1 8 L 1 f s2 7 L 2 f s3 7 L 2 f s1 7 L 1 u 1 7 L 1 u 2 8 L 2 u 3 8 L 2 u 4 5 6 (2)
2
47T1 f s1 8 T2 f s2 8 T2 f s3 7 T1 f s4 8 T1 u 1 7 T2 u 2 7 T2 u 3 8 T1 u 4 5 6 (3)
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1633
1
x54 6
1
x55 6
1
x56 6
1
x57 6
71
m4
71
m5
71
m6
71
m7
2
47 f s1 8 f t1 8 u 1 5 6
(4)
47 f s2 8 f t2 8 u 2 5 6
(5)
47 f s3 8 f t3 8 u 3 5 6
(6)
47 f s4 8 f t4 8 u 4 5 7
(7)
2
2
2
Where f s1 , f s2 , f s3 , and f s4 are the forces that originate from the front-right, front-left,
rear-left and rear-right suspension spring and damping components, respectively, and are
given in equations (8) to (11):
3
4
f s1 6 k1 4x1 7 x4 8 L 1 sin 425 7 T1 sin 4355 8 4x1 7 x4 8 L 1 sin 425 7 T1 sin 43553
4
3
(8)
8 c1 x91 7 x94 8 L 1 29 7 T1 39 6
3
4
f s2 6 k2 4x1 7 x5 8 L 1 sin 425 8 T2 sin 4355 8 4x1 7 x5 8 L 1 sin 425 8 T2 sin 43553
4
3
(9)
8 c2 x91 7 x95 8 L 1 29 8 T2 39 6
3
4
f s3 6 k3 4x1 7 x6 7 L 2 sin 425 8 T2 sin 4355 8 4x1 7 x6 7 L 2 sin 425 8 T2 sin 43553
f s4
8 c3 4x91 7 x96 7 L 2 2 8 T2 35
9 6
(10)
3
4
6 k4 4x1 7 x7 7 L 2 sin 425 7 T1 sin 4355 8 4x1 7 x7 7 L 2 sin 425 7 T1 sin 43553
3
4
(11)
8 c4 x91 7 x97 7 L 2 29 7 T1 39 7
Here, f t1 , f t2 , f t3 , and f t4 are the forces that originate from the front-right, front-left,
rear-left and rear-right wheel forces, respectively. These forces are listed in equations (12) to
(15):
3
4
f t1 6 k5 x4 7 xr1
3
4
f t2 6 k6 x5 7 xr1
3
4
f t3 6 k7 x6 7 xr2
3
4
f t4 6 k8 x7 7 xr2 7
(12)
(13)
(14)
(15)
The source of the nonlinearity associated with the suspension damping is a piecewise
linearity of the damping coefficients c1 , c2 , c3 , and c4 . The damping coefficients used in
equations (8) to (11) are assumed to be in the form
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1634 C. ONAT ET AL.
5
ci 6
cui 6 1250 Ns8m x9
0
6
i 6 16 26 36 47
cdi 6 1000 Ns8m x9 9 0
(16)
Hence, when the relative velocities of the suspensions are positive, the suspension damping coefficients are equal to 1250 Ns/m, whereas when the relative velocities of the suspensions are negative, the suspension damping coefficients are assumed to be equal to 1000 Ns/m.
This damping behavior closely matches the real damping characteristics of the chosen model.
On the other hand, assuming that sin( ) 6 , for small values of and
ci 6 cdi 6 1000 Ns8m i 6 16 7 7 7 6 4
(17)
neglecting the high order terms in the spring forces in equations (8) to (11), yield to
4
3
f s1 6 k1 44x1 7 x4 8 L 1 2 7 T1 355 8 cd1 x91 7 x94 8 L 1 29 7 T1 39 6
3
4
f s2 6 k2 44x1 7 x5 8 L 1 2 8 T2 355 8 cd2 x91 7 x95 8 L 1 29 8 T2 39 6
(18)
(19)
9 6
f s3 6 k3 44x1 7 x6 7 L 2 2 8 T2 355 8 cd3 4x91 7 x96 7 L 2 2 8 T2 35
3
4
f s4 6 k4 44x1 7 x7 7 L 2 2 7 T1 355 8 cd4 x91 7 x97 7 L 2 29 7 T1 39 7
(20)
(21)
Using the state variable transformations x91 6 x8 , 29 6 x 9 , 39 6 x10 , x94 6 x11 , x95 6 x 12 ,
x96 6 x13 , and x97 6 x 14 , one can obtain the state space model of the vehicle system as given
in the appendix (equations (A.1) to (A.5)). Then the state space formalization of the system
equations can be rewritten as
x9 6 Ax 8 Bw w 8 Bu u6
7
8
w
y 6 Cx 8 D
6
u
(22)
where the 14th order state vector is in the form
x6
9
x1 2
3 x4
x5
x6
x7
x91 29
39
x94
x95
x96
x97
T
7
(23)
Here, the control vector u and disturbance vector w are assumed to be in the forms
u6
9
u1 u2 u3 u4
T
(24)
and
w6
9
xr1
xr2
xr3
xr4
T
6
(25)
respectively. The physical values of the parameters that are used in the model are listed in
Table 1.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1635
Table 1. Physical parameters of the system.
Parameter
m1
J2
J3
m4 , m5
m6 , m7
k1 , k2
k3 , k4
k5 , k6 , k7 , k8
c1 , c2 , c3 , c4
v
L1
L2
T1
T2
Value
[1100 kg, 1500 kg]
1848 kg.m2
550 kg.m2
25kg
45kg
15,000 N/m
17,000 N/m
250,000 N/m
1150 N.s/m
10 m/s, 20 m/s, 30 m/s
1.2 m
1.4 m
0.65 m
0.85 m
3. CONSTRUCTION OF THE LPV MODEL
In order to design a gain scheduling controller for the system being considered, an LPV
model of it should first be constructed under the assumption that the model has two scheduling parameters. These parameters are the absolute value of the maximum suspension deflection of the four wheels, p1 , and the mass of the vehicle, p2 .
In the model, the pitching inertia, J 2 , and rolling inertia, J 3 , are assumed to be directly
proportional with the mass of the vehicle, m1 :
J2 6 1768m 1
(26)
J3 6 0775m 1 7
(27)
Note that parameter m1 always appears in the denominator in the system matrices (A.1)
9
T
to (A.3). Therefore, the parameter vector p 6 p1 p2 can be constructed as
4sd1 4
p1 6 max
4sd2 4 6 max
4sd3 4 4sd4 4
4x1 8 L 1 2 7 T1 3 7 x 4 4
4x1 8 L 1 2 8 T2 3 7 x 5 4 4x1 7 L 2 2 8 T2 3 7 x 6 4 (28)
4x1 7 L 2 2 7 T1 3 7 x 7 4
p2 6 18m 1
(29)
where p1 is assumed to vary in the interval [0 0708]. On
9 the other hand, we assume that m1
varies in [1100 1500], and consequently p2 varies in 181500 181100 .
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1636 C. ONAT ET AL.
Considering the linear state space model together with the scheduling parameters, the
following LPV model of the system can be readily constructed:
AP 6 A0 8 p1 A1 8 p2 A2
(30)
BuP 6 Bu0 8 p1 Bu1 8 p2 Bu2
(31)
BwP 6 BW0 8 p1 Bw1 8 p2 Bw2
(32)
CeP 6 Ce0 8 p1 Ce1 8 p2 Ce2
(33)
CyP 6 Cy0 8 p1 Cy1 8 p2 Cy2
(34)
DewP 6 Dew0 8 p1 Dew1 8 p2 Dew2
(35)
DywP 6 Dyw0 8 p1 Dyw1 8 p2 Dyw2
(36)
DeuP 6 Deu0 8 p1 Deu1 8 p2 Deu2
(37)
DyuP 6 Dyu0 8 p1 Dyu1 8 p2 Dyu2 7
(38)
Here, AP is the system matrix, BuP is the control input matrix, BwP is the road input
matrix, CeP is the output matrix for the performances, CyP is the measurement matrix, DewP
is the road input scaling matrix for the performance outputs, DywP is the road input matrix
for the measurement outputs, DeuP is the control input matrix for the performance outputs,
and DyuP is the control input matrix for the measurements.
The matrices A0 , Bw0 , Bu0 , Ce0 , Cy0 , Dew0 , Dyw0 , Deu0 , and Dyu0 are the constant parts of
the system equations which do not depend on the scheduling parameters. These matrices are
given in equations (A.6) to (A.11). A1 , Bw1 , Bu1 , Ce1 , Cy1 , Dew1 , Dyw1 , Deu1 , and Dyu1 are the
matrices associated with the p1 scheduling parameter:
A1 6 [0]14314
Bw1 6 Bu1 6 [0]1434
0
0
0
0
0
0
K sd1 L 1
K sd1
0708
0708
Ce1 6 K sd1
K
sd1 L 1
0708
0708
K sd2 7K sd2 L 2
0708
0708
K
7K
sd2
sd2 L 2
0708
0708
(39)
(40)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
7K sd1 T1
0708
K sd1 T2
0708
K sd2 T2
0708
7K sd2 T1
0708
7K sd1
0708
0
0
0
0
7K sd1
0708
0
0
0
0
7K sd2
0708
0
0
0
0
7K sd2
0708
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1637
7K A
0708
0
0
0 0 0 0
0
7K 2
0708
0
0 0 0 0
0
0
0
0
7K 3
0708
0
0
0
0
0 0 0 0
0
0
0
0 0 0 0
0
0
0
0 0 0 0
0 0 0 0
0 0 0 0
Cy1 6 [0]7314
Dew1 6 Dyw1 6 Deu1 6 Dyu1 6 [0]734 7
(41)
(42)
(43)
9 39 and the four
For the LPV controller, seven measurements are taken. These are: x91 , 2,
suspension deflections, sd1 , sd2 , sd3 , and sd4 . In equation (41), K A , K 2 , K 3 , K sd1 , and K sd2
are coefficients used to achieve a stiffening suspension when the deflections approach their
structural limits. These parameters are closely related to the p1 programming parameter, i.e.,
they can be considered as the weighting filters of the exogenous outputs in the generalized
system. K A , K 2 , and K 3 are gains related to the ride comfort performance. Here, K A is associated with the vertical velocity of the vehicle body, K 2 is associated with the pitch dynamics
of the vehicle body, and K 3 is associated with the yaw motion. Finally, K sd1 and K sd2 are the
weights for the front and rear suspension deflection performances, respectively. The variations of these parameters with respect to p1 are shown in Figure 2. From the figure, it can be
observed that when the maximum suspension deflection magnitude is between 0 and p1 min ,
the parameters that are associated with the ride comfort (K A , K 2 , and K 3 ) are set to their
maximum values and the suspension deflection weights are minimized, in order to focus
fully on ride comfort. However, when p1 is between p1 min and p1 max , the weights associated with the ride comfort decrease linearly whereas the weights that are associated with the
suspension deflection performance increase linearly. When p1 = p1 max , the control system is
fully focused on the suspension deflection minimization problem and does not consider the
ride comfort, in order to prevent the suspension rods from hitting their physical limits.
In the LPV model of the system, the matrices that are associated with programming
parameter p2 are A2 , Bw2 , Bu2 , Ce2 , Cy2 , Dew2 , Dyw2 , Deu2 , and Dyu2 . These matrices are given
in equations (A.12) to (A.15).
3.1. Design of the LPV Controller
Consider the state-space representation of the generalized plant and the controller given by
x9 4t5
Ap 4p4t55 Bwp Bup
x 4t5
e 4t5 6 Cep 4p4t55 Dewp Deup d 4t5 y 4t5
u 4t5
Cyp
Dywp Dyup
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
(44)
1638 C. ONAT ET AL.
Figure 2. Variation of K A , K 2 , K 3 , K sd1 , and K sd2 with changing p1 .
7
x9 K
u
8
7
6
AK 4p4t55 BK 4p4t55
CK 4p4t55 DK 4p4t55
87
xK
y
8
(45)
where x(t) is the state vector, u(t) is the control vector, y(t) is the measurement vector, e(t) is
performance output vector and d4t5 is the disturbance. Note that the only matrices in equation
(44) that are associated with the programming vector p are A and Cep . The quadratic LPVproblem, then, is to find the AK 4p5, BK 4p5, CK 4p5, and DK 4p5 controller matrices, of dimensions (m x m), (m x n y ), (nu x m), and (nu x n y ), respectively, and a minimum value of
so that the closed loop system is stable and the L2 induced norm of the transfer function
from d to e stays less than for all values of p4t5 1. Here, m is the dimension of the
controller state vector, n is the dimension of the plant state space, n y is the dimension of the
measurement space and nu is the dimension of the control space. This problem is feasible if
and only if there exist a common symmetric W 1 0 of dimension (n + m) x (m + n) such that
ATcli 4p5 W 8 WAcli 4p5
WBcli 4p5
71
BTcli 4p5W
7I
71
71
Cclpi 4p5
71
Dcli 4p5
CTcli 4p5
DTcli 4p5 9 0 i 6 16 7776 r
7I
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
(46)
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1639
holds for all p4t5
1 where 1 is the convex polytope of vertices 11 6 12 6 7 7 7 6 1r 1 that is
1 6
5 r
i 1i
:
0
i
6
r
i
i61
61 7
(47)
i61
Acli , Bcli , Ccli and Dcli are the closed-loop system matrices at the ith vertex. It can be
shown that finding a common symmetric solution W 1 0 to equation (46) at each vertex
point (1i 4i = 1, ..., r) can be reduced to tracking the common symmetric matrices R 1 0 and
S 1 0 such that
Api R 8 RATpi RCTepi Bwpi
NR 9 0 i 6 16 7776 r
NTR (48)
7
I
D
ewp
7 I
NTS ATpi S 8 SApi
SBwpi
7 I
CTepi
DTewp NS 9 0 i 6 16 7776 r
7 I
R I
0
I S
(49)
(50)
holds. Here NR and NS denote bases for the null spaces of 4BTup 6 DTeup 5 and 4Cyp ,Dywp 5, respectively. It is then straightforward to construct the vertex controllers using the elimination
lemma (Boyd et al., 1994). Let us denote the controller associated with the ith vertex with
7
2i 1
Then, the controller for any value of p4t5
7
2p 1
BKi
DKi
AKi
CKi
8
7
(51)
1 will be
AK 4p5 BK 4p5
CK 4p5 DK 4p5
8
6
r
i 2i
(52)
i61
where 4 1 6 2 6 7 7 7 6 r 5 is any solution of convex decomposition problem (47).
The block diagram for the generalized plant is shown in Figure 3. Here ei (i = 1, . . . , 11)
are the performance outputs. For these outputs, seven output weighting filters are assigned.
9 respectively. These filters
wx1 , wx2 , and wx3 are the output filters associated with x91 , 29 and 3,
are all chosen to be
x1
6
x2
6
x3
6
25
7
s 8 25
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
(53)
1640 C. ONAT ET AL.
Figure 3. Generalized plant.
Note that the bandwidth of the controller is set to 25 rad/s. wsd1 , wsd2 , wsd3 , and wsd4
are the weighting filters associated with the front right, front left, rear left and rear right
suspension deflection performances, respectively. In our study, they are chosen to be
sd1
6
sd2
6
5
6
s85
(54)
sd3
6
sd4
6
10
7
s 8 10
(55)
The scaling weights chosen to be associated with the road disturbances are wd1 = wd2 =
wd3 = wd4 = 0.1, whereas performances that are related to the control signal are set to wu1 =
wu2 = wu3 = wu4 = 0.01. Finally, the weights assigned to sensor noises are wd5 = wd6 = wd7 =
wd8 = wd9 = wd10 = wd11 = 0.0001. These weights were found by a trial and error approach.
LPV controllers operate by switching between the pre-designed controllers for different
operating points using a common Lyapunov function depending on the measurement of the
scheduling parameters. In our control problem, it is assumed that there are 2 scheduling parameters, thus the number of vertices is r = 2n = 4. Hence, four local controllers are designed
for different values of p. Figure 4 shows the vertices of the corresponding polytope and the
associated vertex controllers.
K1 4p5 is the controller designed for p1 = 0 and p2 = p2 max (m1 = 1100 kg), K2 4p5 is the
controller designed for p1 = 0.08 and p2 = p2 max , K3 4p5 is the controller for p1 = 0 and P2
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1641
Figure 4. LPV controller family.
= p2 min (m1 = 1500 kg), and K4 4p5 is the controller for the vertex p1 = 0.08 and p2 = p2 min .
These controllers can be represented in state space as
K1 4p5 6
K2 4p5 6
K3 4p5 6
K4 4p5 6
3
3
3
3
A1 4p5 6 B1 4p5 6 C1 4p5 6 D1 4p5
A2 4p5 6 B2 4p5 6 C2 4p5 6 D2 4p5
A3 4p5 6 B3 4p5 6 C3 4p5 6 D3 4p5
A4 4p5 6 B4 4p5 6 C4 4p5 6 D4 4p5
4
4
4
4
6
(56)
6
(57)
6
(58)
7
(59)
In order to obtain the maximum benefit from the controller, we utilize the following
control methodology for the polytope:
3
A1 6 B1 6 C1 6 D1
4
6
if
p1
p2 6 181100
4
3
A2 6 B2 6 C2 6 D2 6
K 4p5 :6
if
p1
p2 6 181100
4
3
A3 6 B3 6 C3 6 D3 6
K 4p5 :6
if
p1
p2 6 181500
4
3
A4 6 B4 6 C4 6 D4 6
K 4p5 :6
if
p1
K 4p5 :6
9
0 0703
and
9
0708 2
4
and
9
0 0703
and
p2 6 181500
3
4
A 4p5 6 B 4p5 6 C 4p5 6 D 4p5 6
K 4p5 :6
4
3
p2 min p2 max 7
p2
9
0708 2
4
and
if
p1
3
p1 min
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
p1 max
4
6
(60)
1642 C. ONAT ET AL.
When p1 is in the range [0 0.03] and p2 = 1/1100, the controller focuses solely on maximizing the ride comfort. At vertex 2, although the mass of the vehicle is at its minimum
value, the suspension deflection is out of range. In this case, in order to protect the system
from possible damage, the controller operates to reduce the suspension deflection and does
not consider ride comfort. Vertex 3 corresponds to the operating point where the controller
considers the ride comfort and suspension deflection objectives equally. Finally, at vertex
4, the system is subjected to the worst case scenario, and the controller only considers the
suspension deflection minimization objective. Between these vertices, the controller acts depending on the convex decomposition of the scheduling parameters. This situation is shown
in the last line of equations (60).
The LPV controller for any point in the polytope 1, shown in Figure 4, can be constructed
by interpolating these four vertex controllers using the equations
A 4p5 6
A1 7A3
p2 min 7 p2 max
A2 7A4
8
A
3 4 p2 max 7 p2 5 8 A1 7 p2 min
3
p
7
p
5
4
2 max
2
2
7 p2 max
4 p1 min 7 p1 max 5
2
A1 7 A3
3 4 p1 7 p1 min 5 8
(61)
3 4 p2 max 7 p2 5 8 A1
p2 min 7 p2 max
B1 7B3
B2 7B4
3 4 p2 max 7 p2 5 8 B1 7 p2 min
3 4 p2 max 7 p2 5 8 B2
p2 min 7 p2 max
7 p2 max
B 4p5 6
4 p1 min 7 p1 max 5
1
2
B1 7 B3
3 4 p1 7 p1 min 5 8
(62)
3 4 p2 max 7 p2 5 8 B1
p2 min 7 p2 max
C1 7C3
C2 7C4
3 4 p2 max 7 p2 5 8 C1 7 p2 min
3 4 p2 max 7 p2 5 8 C2
p2 min 7 p2 max
7 p2 max
C 4p5 6
4 p1 min 7 p1 max 5
1
2
C1 7 C3
3 4 p1 7 p1 min 5 8
(63)
3 4 p2 max 7 p2 5 8 C1
p2 min 7 p2 max
D1 7D3
D2 7D4
8
D
8
D
3
p
7
p
3
p
7
p
7
5
5
4
4
2
max
2
1
2
max
2
2
p2 min 7 p2 max
p2 min 7 p2 max
D 4p5 6
4 p1 min 7 p1 max 5
1
2
D1 7 D3
3 4 p1 7 p1 min 5 8
(64)
3 4 p2 max 7 p2 5 8 D1 7
p2 min 7 p2 max
1
4. SIMULATION STUDY
In order to test the validity of the suggested approach, a set of simulations are carried out
on the nonlinear model for different road conditions and two different masses. In these simulations, the vehicle’s velocity is assumed to be 20 m/s, and the vehicle is subjected to two
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1643
Figure 5. First road profile, having a 5cm bump.
different road profiles. The first road profile has a sinusoidal bump with a peak height of
5cm, while the second has a sinusoidal bump with a peak height of 11cm. These are shown
in Figures 5 and 6, respectively. For all simulations, the rear wheel input is a delayed version of that for the front wheel. Also note that throughout the simulations, passive system
terminology is used to describe the suspension system without active control.
Figures 7, 8, and 9 show, respectively, the vertical displacement of the body and the pitch
and yaw motions of the vehicle for the road profile with a 5cm bump. For this road condition,
since the maximum suspension travel is small in magnitude, the LPV controller focuses
solely on minimizing the vertical, roll, and pitch accelerations of the body. It is obvious from
the simulations that the controller successfully suppresses the road effect and minimizes the
accelerations in about 0.8 s, without any overshoot. Figure 10 shows the deflection of the
front right suspension. It can be seen that, since the maximum suspension travel is safely
removed from the structural limits, the controller focuses exclusively on minimization of
body acceleration.
The road profile with the 11cm bump reflects the type of condition that might be harmful
to the suspension system1 in this situation, the suspension rod may hit the physical limit
unless it is controlled. As can be observed from Figure 11, the system that is controlled with
the proposed method prevents the rod from hitting the physical limit. However, the vertical
accelerations are greater than for the first road condition. This situation is to be expected,
since in the case with the 11cm bump, the controller expends its full energy on minimizing
the suspension deflection. Figure 12 shows the vertical accelerations for the second road
condition. It can be observed from the figure that, again, the proposed controller successfully
suppresses the effect of the bump very rapidly and without hitting the structural limits.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1644 C. ONAT ET AL.
Figure 6. Second road profile, having an 11cm bump.
Figure 7. Vertical acceleration of the vehicle body for the road profile with a 5cm bump.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1645
Figure 8. Pitch acceleration of the vehicle body for the road profile with a 5cm bump.
Figure 9. Roll acceleration of the vehicle body for the road profile with a 5cm bump.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1646 C. ONAT ET AL.
Figure 10. Front right suspension deflection of the vehicle for the road profile with a 5cm bump.
Figure 11. Front right suspension deflection of the vehicle for the road profile with an 11cm bump.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1647
Figure 12. Vertical acceleration of the vehicle body when the vehicle is subjected to an 11cm bump.
The main property of the proposed controller is that it observes the system via p(t) and
operates to improve the ride comfort in good road conditions but changes its character when
the road conditions might harm the suspension structure to prevent it from hitting the physical limits. Figure 13 shows the time response of the roll acceleration of the vehicle body
when subjected to the 11cm bump. Significant improvement can be observed in comparison
with the passive case. Similar results are obtained for the pitch motion, shown in Figure 14.
For comparison purposes the frequency responses of the closed loop system are also displayed. Figure 15 shows the frequency response of the system from road input to the vehicle
body acceleration output for different values of suspension deflection and vehicle mass m1 .
Similarly, Figures 16 and 17 show the frequency response of the system from road input to
front right suspension deflection and acceleration of pitch motion, respectively, and Figure
18 shows the frequency response of the roll motion.
Note that these frequency responses are obtained by assuming that the time-varying parameters are frozen. It can be seen that perfect responses are obtained for small values of suspension deflection, and that when the suspension deflection approaches its physical limits,
the acceleration responses deteriorate while the suspension deflection responses simultaneously decrease in magnitude. This is due to the fact that the controller changes its behavior
to prevent the suspension from hitting the stroke limits when the road conditions become
dangerous for the vehicle. It can also be observed that changing the vehicle mass does not
greatly affect the efficiency of the controller. Similar responses were obtained for the pitch
and roll dynamics of the vehicle.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1648 C. ONAT ET AL.
Figure 13. Roll acceleration of the vehicle body for the 11cm bump.
Figure 14. Pitch acceleration of the vehicle body for the 11cm bump.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1649
Figure 15. Frequency response of the acceleration of the vehicle body for different suspension deflections
and masses: (Left) m1 is minimum, (right) m1 is maximum, passive system (solid), controlled system
(dot-dash).
Figure 16. Frequency response of the suspension deflection of the vehicle body for different suspension
deflections and masses: (Left) m1 is minimum, (right) m1 is maximum, passive system (solid), controlled
system (dot-dash).
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1650 C. ONAT ET AL.
Figure 17. Frequency response of the pitch motion for different suspension deflections and masses:
(Left) m1 is minimum, (right) m1 is maximum, passive system (solid), controlled system (dot-dash).
Figure 18. Frequency response of the roll motion for different suspension deflections and masses: (Left)
m1 is minimum, (right) m1 is maximum, passive system (solid), controlled system (dot-dash).
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1651
Figure 19. Body acceleration of the full loaded vehicle for an 11cm bump.
4.1. Worst Case Performance Analysis of the Controller
It is well known that an increase in the mass of the vehicle results a decrease in the performance of the suspension system. In practice, most suspension failures occur when the
vehicle is fully loaded and subjected to harmful road conditions (Figure 6). In this respect,
the worst case performance of the proposed controller is tested by assuming that vehicle is
fully loaded. Figure 19 shows the acceleration of the vehicle body when the full vehicle is
subjected to the 11cm bump.
When the vehicle hits the bump at 0 sec, the amplitude of the vertical acceleration of the
chassis reaches high values, as the controller has been designed to maximize the suspension
deflection performance. However, the controller rapidly recovers and suppresses the road
disturbances in around 0.6 s. Similar acceleration responses are obtained for the pitch and
roll dynamics, and are shown in Figures 20 and 21, respectively.
The responses of the suspension deflection to the 11cm bump when the vehicle is fully
loaded are plotted in Figure 22. It is obvious from the figure that the controller successfully
suppresses the effect of the road disturbance and prevents the suspension from exceeding its
physical limit.
4.2. Performance Analysis of the Controller for Different Velocities
In the preceding sections, the controller performance has been tested with the road profile
that is shown in Figure 6 assuming that the vehicle is traveling at 20 m/s. However, we know
that different vehicle speeds cause different controller performances when the vehicle hits
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1652 C. ONAT ET AL.
Figure 20. Pitch acceleration of the full loaded vehicle for an 11cm bump.
Figure 21. Roll acceleration of the full loaded vehicle for an 11cm bump.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1653
Figure 22. Response of the front right suspension deflection to the 11cm bump when the vehicle is fully
loaded.
a bump, and tests are therefore now performed for two further vehicle speeds1 10 m/s and
30 m/s. Figures 23 and 24 show the road profiles that are used during these tests. These road
profiles are considered to represent challenging situations for the suspension system, as a
deep hollow follows immediately after a high bump.
Figure 25 shows the vertical body acceleration of the vehicle body for v = 10 m/s when
the vehicle is subjected to the road profile shown in Figure 23. During time interval from
0 to 0.5 s, the controlled system performs badly in comparison to the passive case. After
0.7 s, however, the controller rapidly compensates for the disturbance and minimizes the
vibrations. The reason for this is that the time response of the suspension system during
the period from 0 to 0.5 s corresponds to the frequency response of the system for 60 rad/s
and higher frequencies. However, it is well known that control is not needed for vibrations
having frequencies that are larger then 25 rad/s. Observe that similar results are obtained for
pitch and roll dynamics, in Figures 26 and 27. In Figure 28 we show the time response of
the front-right suspension for this road profile at 10 m/s, and it can be seen that although
the acceleration performance of the controller is not good in the first 0.5 s after the vehicle
hits the first bump at 0sec, the controller still prevents the suspension rod from hitting its
structural limit.
During the second test, the vehicle is subjected to the road profile shown in Figure 24
and the vehicle speed is assumed to be 30 m/s. In Figure 29, we show the time response of
the vertical body acceleration, and Figures 30 and 31 show the pitch and roll accelerations of
the vehicle, respectively. It can be seen that the results obtained are similar to those produced
in the test with v = 10m/s. However, this is due to the fact that the acceleration performance
is not considered by the controller in this challenging situation1 the controller focuses exclu-
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1654 C. ONAT ET AL.
Figure 23. Road profile used during tests with v = 10 m/s.
Figure 24. Road profile used during tests with v = 30m/s.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1655
Figure 25. Vertical body acceleration of the vehicle when subjected to the road profile shown in Figure 23.
sively on minimizing the suspension deflection. Figure 32 shows the suspension deflection
time response for this case. Once again, the controller successfully minimizes the suspension
deflection.
4.3. Random Road Profile Test
In this section, random road profile tests are performed on the vehicle system. It is assumed
that the vehicle is driven on the road profile shown in Figure 33 at a speed of 20 m/s. This
random road profile test corresponds to the high-frequency response test for the system.
Table 2 shows the rms values of different performance parameters that are obtained during
this test when m1 = 1100 kg, and Table 3 shows the equivalent values for m1 = 1500 kg.
Recall that, when the vehicle mass increases, the controller is more likely to prioritize the
suspension deflection over the ride comfort than when the road conditions are acceptable
and the mass of the vehicle is near its nominal value. This situation easily can be observed
from the results given in Tables 2 and 3. When m1 = 1100 kg, the body accelerations and
suspension deflections have acceptable magnitudes, but when the vehicle mass increases to
1500 kg, the controller focuses solely on the suspension deflection mechanism. It can be
seen from Table 2 that, although the acceleration measures are not better than for the passive
case, the suspension deflection performance is perfect.
5. CONCLUSION
In this article, we addressed the design of an LPV model based gain-scheduled robust controller that is sensitive to variations of the vehicle mass and suspension deflection. The main
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1656 C. ONAT ET AL.
Figure 26. Pitch acceleration of the vehicle when subjected to the road profile shown in Figure 23.
Figure 27. Roll acceleration of the vehicle when subjected to the road profile shown in Figure 23.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1657
Figure 28. Front-right suspension deflection of the vehicle for the road profile shown in Figure 23.
Figure 29. Vertical body acceleration of the vehicle when subjected to the road profile shown in Figure 24.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1658 C. ONAT ET AL.
Figure 30. Pitch acceleration of the vehicle when subjected to the road profile shown in Figure 24.
Figure 31. Roll acceleration of the vehicle when subjected to the road profile shown in Figure 24.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1659
Figure 32. Front-right suspension deflection of the vehicle for the road profile shown in Figure 24.
Figure 33. Random road profile.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1660 C. ONAT ET AL.
Table 2. rms values of some performance measures for m1 = 1100 kg.
Performance measure
d2 x1 /dt2
d2 2/dt2
d2 3/dt2
sd1
Passive case (rms)
201.6061
151.0758
33.5515
2.0781
Controlled case (rms)
193.5194
150.4219
28.5087
1.6969
Table 3. rms values of some performance measures when m1 = 1500 kg.
Performance measure
d2 x1 /dt2
d2 2/dt2
d2 3/dt2
sd1
Passive case (rms)
152.7257
111.6723
26.9491
2.2257
Controlled case (rms)
176.8431
140.7024
27.0876
1.4134
motivation in proposing this controller is that existing linear controllers are not simultaneously capable of both maximizing ride comfort and minimizing suspension deflections.
Using the linear parameter varying control techniques, we have designed a nonlinear control
algorithm that focuses either on maximizing the ride comfort or minimizing the suspension
deflection depending on the online measurements of the suspension deflection and mass
of the vehicle. Since a full vehicle model is considered during the design process, our controller utilizes the maximum of the four suspension deflections, in order to consider the worst
case scenario. By utilizing this type of controller, the vehicle suspension systems are always
prevented from hitting their structural limits. Extensive simulations that are carried out on
nonlinear vehicle model show that the proposed controller achieves high performance for
several different road conditions with varying vehicle masses.
APPENDIX A
0
0
0
0
0
0
A6 0
a861
a961
a1061
a1161
a1261
a1361
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
a1168 a1169 a11610 a11611 0
a1262 a1263 0
a1265 0
0
a1268 a1269 a12610 0
a12612 0
a1362 a1363 0
0
a1366 0
a1368 a1369 a13610 0
0
a13613
0
0
0
0
1
(A.1)
a8614 a9614 a10614 0
0
0
a1461 a1462 a1463 0
0
0
a1467 a1468 a1469 a14610 0
0
0
a14614
0
0
0
0
0
0
0
0
0
a862
a863
a864
a865
a866 a867
a868
a869
a8610
a8611 a8612
a8613
a962
a963
a964
a965
a966 a967
a968
a969
a9610
a9611 a9612
a9613
a1062 a1063 a1064 a1065 a1066 a1067 a1068 a1069 a10610 a10611 a10612 a10613
a1162 a1163 a1164 0
0
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1661
where
a861 6 47k1 7 k2 7 k3 7 k4 5 8m 1 6
a862 6 47k1 L 1 7 k2 L 1 8 k3 L 2 8 k4 L 2 5 8m 1 6
a863 6 4k1 T 1 7 k2 T 2 7 k3 T 2 8 k4 T 15 8m 1 6
a866 6 k3 8m 1 6
a867 6 k4 8m 1 6
a864 6 k1 8m 1 6
a865 6 k2 8m 1 6
a868 6 47c1 7 c2 7 c3 7 c4 5 8m 1 6
a869 6 47c1 L 1 7 c2 L 1 8 c3 L 2 8 c4 L 2 5 8m 1 6
a8610 6 4c1 T 1 7 c2 T 2 7 c3 T 2 8 c4 T 15 8m 1 6
a8611 6 c1 8m 1 6
a8612 6 c2 8m 1 6
a8613 6 c3 8m 1 6 a8614 6 c4 8m 1 6 a961 6 47k1 L 1 7 k2 L 1 8 k3 L 2 8 k4 L 2 5 8J2 6
4
3
a962 6 7k1 L 21 7 k2 L 21 7 k3 L 22 7 k4 L 22 8J2 6
a963 6 4k1 T1 L 1 7 k2 T2 L 1 8 k3 T2 L 2 7 k4 T1 L 2 5 8J2 6
a965 6 k2 L 1 8J2 6
a966 6 7k3 L 2 8J2 6
a964 6 k1 L 1 8J2 6
a967 6 7k4 L 2 8J2 6
a968 6 47c1 L 1 7 c2 L 1 8 c3 L 2 8 c4 L 2 5 8J2 6
4
3
a969 6 7c1 L 21 7 c2 L 21 7 c3 L 22 7 c4 L 22 8J2
a9610 6 4c1 T1 L 1 7 c2 T2 L 1 8 c3 T2 L 2 7 c4 T1 L 2 5 8J2 6
a9612 6 c2 L 1 8J2 6
a966 6 7c3 L 2 8J2 6
a9611 6 c1 L 1 8J2 6
a967 6 7c4 L 2 8J2 6
a1061 6 4k1 T1 7 k2 T2 7 k3 T2 8 k4 T1 5 8J3 6
a1062 6 4k1 T1 L 1 7 k2 T2 L 1 8 k3 T2 L 2 7 k4 T1 L 2 5 8J3 6
4
3
a1063 6 7k1 T12 7 k2 T22 7 k3 T22 7 k4 T12 8J3 6 a1064 6 7k1 T1 8J3 6
a1065 6 k2 T2 8J3 6
a1066 6 k3 T2 8J3 6
a1067 6 7k4 T1 8J3 6
a1068 6 4c1 T1 7 c2 T2 7 c3 T2 8 c4 T1 5 8J3 6
a1069 6 4c1 T1 L 1 7 c2 T2 L 1 8 c3 T2 L 2 7 c4 T1 L 2 5 8J3 6
3
4
a10610 6 7c1 T12 7 c2 T22 7 c3 T22 7 c4 T12 8J3 6 a10611 6 7c1 T1 8J3 6
a10612 6 c2 T2 8J3 6
a1162 6 k1 L 1 8m 4 6
a10613 6 c3 T2 8J3 6
a10614 6 7c4 T1 8J3 6
a1163 6 7k1 T1 8m 4 6
a1161 6 k1 8m 4 6
a1164 6 47k1 7 k5 5 8m 4 6
a1168 6 c1 8m 4 6
a1169 6 c1 L 1 8m 4 6
a11610 6 7c1 T1 8m 4 6
a1261 6 k2 8m 5 6
a1262 6 k2 L 1 8m 5 6
a1263 6 k2 T2 8m 5 6
a11611 6 7c1 8m 4 6
a1265 6 47k2 7 k6 5 8m 5 6
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
1662 C. ONAT ET AL.
a1268 6 c2 8m 5 6
a1269 6 c2 L 1 8m 5 6
a12610 6 c2 T2 8m 5 6
a1361 6 k3 8m 6 6
a1362 6 7k3 L 2 8m 6 6
a1363 6 k3 T2 8m 6 6
a1366 6 47k3 7 k7 5 8m 6 6
a1368 6 c3 8m 6 6
a1369 6 7c3 L 2 8m 6 6
a13610 6 c3 T2 8m 6 6
a13613 6 7c3 8m 6 6
a1461 6 k4 8m 7 6
a1462 6 7k4 L 2 8m 7 6
a1463 6 7k4 T1 8m 7 6
a1468 6 c4 8m 7 6
a1469 6 7c4 L 2 8m 7 6
and a14610 6 7c4 T1 8m 7 6
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
Bw 6 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
Bu 6 0 0 0 0 0 0 0
0 0 0 0 0 0 0
C6
0
0
0
0
0
0
0
0
0
1
L1
7T1
1
L1
T2
1 7L 2
T2
1 7L 2 7T1
a12612 6 7c2 8m 5 6
a1467 6 47k4 7 k8 5 8m 7 6
a14614 6 7c4 8m 7 7
T
k5
m4
0
0
0
k6
m5
0
0
0
k7
m6
0
0
0
0
0 6
0 k8 m7
T
1
m1
L1
J2
7T1
J3
71
m4
0
0
1
m1
L1
J2
T2
J3
0
71
m5
0
1
m1
7L 2
J2
T2
J3
0
0
71
m6
1
m1
7L 2
J2
7T1
J3
0
0
0
0
0
0
0
0
0
0
0
(A.2)
1 0 0 0 0 0 0
0
0 6(A.3)
0 71 m7
0 1 0 0 0 0 0 0
0
0
0 0 0 1 0 0 0 0 71 0
0
0 0 0 0 0 0 0 0 6
0 71 0
0 0 0 0 0 0 0 0 0
0 71 0 0 0 0 0 0 0 0 0
0
0 71 0 0 0 0 0 0 0
D 6 [0]738 7
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
(A.4)
(A.5)
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1663
A0 6 0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a1161 a1162 a1163 a1164 0
0
0
a1168 a1169 a11610 a11611 0
0
0
a1261 a1262 a1263 0
a1265 0
0
a1268 a1269 a12610 0
a12612 0
0
a1361 a1362 a1363 0
0
a1366 0
a1368 a1369 a13610 0
0
a13613 0
a1461 a1462 a1463 0
0
0
a1467 a1468 a1469 a14610 0
0
0
0 0 0 0 0 0 0 0 0 0
Bw0
0 0 0 0 0 0 0 0 0 0
6
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
Bu0
0 0
0 0
6
0 0
0 0
6 (A.6)
a14614
T
k5
m4
0
0
0
k6
m5
0
0
0
k7
m6
0
0
0
0
0 6
0 k8 m7
(A.7)
T
0 0 0 0 0
1
m1
L1
J2
7T1
J3
71
m4
0
0
0 0 0 0 0
1
m1
L1
J2
T2
J3
0
71
m5
0
0 0 0 0 0
1
m1
7L 2
J2
T2
J3
0
0
71
m6
0 0 0 0 0
1
m1
7L 2
J2
7T1
J3
0
0
0
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
0
0 6 (A.8)
0 71 m7
1664 C. ONAT ET AL.
Ce0 6 Cy0 6 0 0 0 0 0 0 0 KA
0
0
0 0 0 0 0 0 0
0
K2
0
0 0 0 0 0 0 0
0
0
K3
0 0 0 0 0 0 0
0
0
0
0 0 0 0 0 0 0
0
0
0
0 0 0 0 0 0 0
0
0
0
0 0 0 0 0 0 0 0 0 0 0 0 6
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0
0
0
0 0 0 0
0
0
0
0
0
0
0
0
0
1
L1
7T1
1
L1
T2
1 7L 2
T2
1 7L 2 7T1
0
0
0
0
0
0
0
0
0 0 0 0
1 0 0 0 0 0 0
(A.9)
0 1 0 0 0 0 0 0
0
0
0 0 0 1 0 0 0 0 71 0
0
0 0 0 0 0 0 0 0 6
0 71 0
0 0 0 0 0 0 0 0 0
0 71 0 0 0 0 0 0 0 0 0
0
0 71 0 0 0 0 0 0 0
(A.10)
T
Dew0 6 Dyw0 6 Deu0 6 Dyu0 6 [0]437
7
A2 6 (A.11)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
n 8614 n 9614 n 10614 0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
n 861 n 862 n 863 n 864 n 865 n 866 n 867 n 868 n 869 n 8610 n 8611 n 8612 n 8613
n 961 n 962 n 963 n 964 n 965 n 966 n 967 n 968 n 969 n 9610 n 9611 n 9612 n 9613
n 1061 n 1062 n 1063 n 1064 n 1065 n 1066 n 1067 n 1068 n 1069 n 10610 n 10611 n 10612 n 10613
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
0
(A.12)
LPV MODEL BASED GAIN-SCHEDULING CONTROLLER 1665
where
n 861 6 47k1 7 k2 7 k3 7 k4 5 6
n 862 6 47k1 L 1 7 k2 L 1 8 k3 L 2 8 k4 L 2 5 6
n 863 6 4k1 T1 7 k2 T2 7 kT2 8 k4 T1 5 6
n 866 6 k3 6
n 867 6 k43 6
n 864 6 k1 6
n 868 6 47c1 7 c2 7 c3 7 c4 5 6
n 869 6 47c1 L 1 7 c2 L 1 8 c3 L 2 8 c4 L 2 5 6
n 8611 6 c1 6
n 8612 6 c2 6
n 865 6 k2 6
n 8613 6 c3 6
n 8610 6 4c1 T1 7 c2 T2 7 c3 T2 8 c4 T1 5 6
n 8614 6 c4 6
n 961 6 47k1 L 1 7 k2 L 1 8 k3 L 2 8 k4 L 2 5 817686
4
3
n 962 6 7k1 L 21 7 k2 L 21 7 k3 L 22 7 k4 L 22 817686
n 963 6 4k1 T1 L 1 7 k2 T2 L 1 8 k3 T2 L 2 7 k4 T1 L 2 5 817686
n 964 6 k1 L 1 817686
a965 6 k2 L 1 8J2 817686
n 966 6 7k3 L 2 817686
n 967 6 7k4 L 2 817686 n 968 6 47c1 L 1 7 c2 L 1 8 c3 L 2 8 c4 L 2 5 817686
4
3
n 969 6 7c1 L 21 7 c2 L 21 7 c3 L 22 7 c4 L 22 817686
n 9610 6 4c1 T1 L 1 7 c2 T2 L 1 8 c3 T2 L 2 7 c4 T1 L 2 5 817686
n 9612 6 c2 L 1 817686
n 9613 6 7c3 L 2 817686
n 9611 6 c1 L 1 817686
n 9614 6 7c4 L 2 817686
n 1061 6 4k1 T1 7 k2 T2 7 k3 T2 8 k4 T1 5 807756
n 1062 6 4k1 T1 L 1 7 k2 T2 L 1 8 k3 T2 L 2 7 k4 T1 L 2 5 807756
4
3
n 1063 6 7k1 T12 7 k2 T22 7 k3 T22 7 k4 T12 807756 n 1064 6 7k1 T1 807756
n 1065 6 k2 T2 807756
n 1066 6 k3 T2 807756
n 1067 6 7k4 T1 807756
n 1068 6 4c1 T1 7 c2 T2 7 c3 T2 8 c4 T1 5 807756
n 1069 6 4c1 T1 L 1 7 c2 T2 L 1 8 c3 T2 L 2 7 c4 T1 L 2 5 807756
3
4
n 10610 6 7c1 T12 7 c2 T22 7 c3 T22 7 c4 T12 807756 n 10611 6 7c1 T1 807756
n 10612 6 c2 T2 807756
n 10613 6 c3 T2 807756
and n 10614 6 7c4 T1 807757
Bw2 6 Bu2 6 [0]1434 6
(A.13)
Ce2 6 Cy2 6 [0]7314 6
(A.14)
Dew2 6 Dyw2 6 Deu2 6 Dyu2 6 [0]734 7
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
(A.15)
1666 C. ONAT ET AL.
REFERENCES
Alleyne, A. and Hedrick, J. K., 1995, “Nonlinear adaptive control of active suspensions,” IEEE Transactions on
Control Systems Technology 3, 94–101.
Becker, G. and Packard, A., 1994, “Robust performance of linear parametrically varying systems using parametrically-dependent linear feedback,” Systems and Control Letters 23, 205–215.
Bianchi, F. D., Mantz, R. J., and Christiansen, C. F., 2005, “Gain scheduling control of variable-speed wind energy
conversion systems using quasi-LPV models,” Control Engineering Practice 13, 247–255.
Biannic, J. M. and Apkarian, P., 1999, “Missile autopilot design via a modified LPV synthesis technique,” Aerospace
Science and Technology 3, 153–160.
Boyd, S., El Ghaoui, L., Feron, E., and Balakrishnan, V., 1994, Linear Matrix Inequalities in System and Control
Theory, Siam, Philadelphia.
Chen, H. and Guo, K. H., 2005, “Constrained H2 control of active suspensions: An LMI approach,” IEEE Transactions on Control Systems Technology 13, 412–421.
D’Amato, F. J. and Viassolo, D. E., 2000, “Fuzzy control of active suspensions,” Mechatronics 10, 897–920.
Fialho, I. J. and Balas, G. J., 2000, “Design of nonlinear controllers for active vehicle suspensions using parametervarying control synthesis,” Vehicle System Dynamics 33, 351–370.
Fialho, I. J. and Balas, G. J., 2002, “Road adaptive active suspension design using linear parameter varying gainscheduling,” IEEE Transactions on Control Systems Technology 10, 43–54.
Fujisaki, Y., Dabbene, F., and Tempo, R., 2003, “Probabilistic design of LPV control systems,” Automatica 39,
1323–1337.
Gaspar, P., Szaszi, I., and Bokor, J., 2003, “Design of robust controllers for active vehicle suspension using mixed
-synthesis,” Vehicle System Dynamics 40, 193–228.
Hrovat, D., 1997, “Survey of advanced suspension developments and related optimal control applications,” Automatica 33, 1781–1817.
Krtolica, R. and Hrovat, D., 1992, “Optimal active suspension control based on a half-car model: An analytical
solution,” IEEE Transactions on Automatic Control 37, 528–532.
Sam, Y. M., Osman, J. H. S., and Ghani, M. R. A., 2004, “A class of proportional-integral sliding mode control with
application to active suspension system,” Systems and Control Letters 51, 217–223.
Wang, J. and Wilson, D. A., 2001, “Mixed GL2 /H2 /GH2 control with pole placement and its application to vehicle
suspension systems,” International Journal of Control 74, 1353–1369.
Yoshimura, T., Kume, A., Kurimoto, M., and Hino, J., 2001, “Construction of an active suspension system of a
quarter car model using the concept of sliding mode control,” Journal of Sound and Vibration 239, 187–
199.
Downloaded from http://jvc.sagepub.com at Yildiz Teknik Univ - on October 16, 2007
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution.
View publication stats