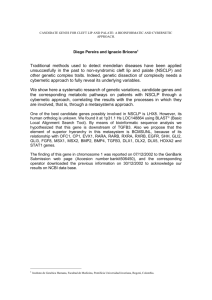
Alumno: Efrén Martínez Bautista CIDESI Posgrado Interinstitucional en Ciencia y Tecnología Control por modos deslizantes Tarea 1 1. Un movimiento longitudinal simplificado m de un vehículo submarino se puede describir mediante mẍ + k ẋ|ẋ| = u (1) donde x denota la posición del vehículo, u es la entrada de control (una fuerza que es proporcionada por una hélice), m es la masa del vehículo y k > 0 es el coeficiente de arrastre. Asumiendo que el valor de m es conocido exactamente, el coeficiente de arrastre es acotado k1 ≤ k ≤ k2 y la posición y la derivada (velocidad) x, ẋ son medidos: a) Obtener el modelo en espacio de estados del vehículo, usando x1 = x, x2 = ẋ como las variables de estado. ẋ1 = x2 u − kx2 |x2 | ẋ2 = m b) Diseñe una ley de control de modo deslizante convencional u que impulse x1 , x2 → 0 conforme el tiempo crece. Primero se propone una superficie deslizante σ = x2 + cx1 (2) Después se propone una función candidata de Lyapunov, sea 1 V = σ2 2 (3) Para cumplir con la condición de estabilidad asintótica global, se debe garantizar que V̇ = σ σ̇ < 0 (4) se sigue que V̇ = σ (ẋ2 + cx2 ) k u = σ − x2 |x2 | + + cx2 m m ¿Cómo se debe elegir el control u para garantizar que se cumpla la ec. (4)? Se elige la siguiente ley de control u u = −mcx2 − (1.9x22 + ρ)sgn(σ) entonces V̇ = − 1 σ 1.9x22 sgn(σ) + kx2 |x2 | + ρsgn(σ) m 1 (5) Puesto que la función k ẋ|ẋ|, puede acotarse como |k ẋ |ẋ|| ≤ k2 ẋ2 = 1.9ẋ2 luego entonces |kx2 |x2 || ≤ 1.9x22 ⇒ 1.9x22 − |kx2 |x2 || ≥ 0 esto va a implicar que 1.9x22 sgn(σ) + kx2 |x2 | ≤ 1.9x22 − |kx2 |x2 || sgn(σ) (6) por lo tanto V̇ ≤ − 1 σ (ρsgn(σ)) m (7) esto es ρ √ 1/2 ρ |σ| = − 2V (8) m m Se debe de asegurar que V = 0 en un tiempo finito tr , resolviendo la ec. (8), da como resultado m tr ≤ |σ(0)| (9) ρ V̇ ≤ − c) Simular el sistemade control para x1 (0) = 2m, x2 (0) = 0.5m/s, m = 4kg y k = kg . Grafique a través del tiempo la variable deslizante, la función 1.5 + 0.4 sin(2t) ms de control u, la posición x1 y la velocidad x2 Se implemento el siguiente código en MATLAB clc clear clf % condiciones iniciales x1_0= 2; % m- posición x2_0=0.5; % m/s - velocidad % parámetros % K= k1 + k2 sin(w1) [kg/ms] m= 4; % kg - masa k1=1.5; k2=0.4; w=2; % Hint - constante cte1= 1.9; % Control % u=-c x2 - ro sing(sigma) c=1; rho=4; 2 Alumno: Efrén Martínez Bautista CIDESI Y se implementó el siguiente diagrama en SIMULINK Fig. 1: Sistema con ley de control u y función SIGN Primero se se grafico el comportamiento del sistema sin una ley de control para ver el comportamiento de posición y velocidad. La posición tiende a una constante y la velocidad tiende a cero. Variables de estado sin control 2.5 x1 x2 2 1.5 x1,x2 1 0.5 0 0 1 2 3 4 5 6 7 8 9 t Fig. 2: Variables de estado en el tiempo sin control 3 10 Las siguientes gráficas son los resultados obtenidos con los parámetros mencionados. La siguiente Fig. muestra que las variables de estado si convergen asintóticamente Convergencia asintótica de variables de estado 2.5 x1 2 x2 1.5 x1,x21 0.5 0 -0.5 -1 0 1 2 3 4 5 6 7 8 9 10 t Fig. 3: Convergencia asintótica de las variables de estado Variables de estado 0.5 0 x2 -0.5 -1 0 0.5 1 1.5 x1 Fig. 4: Variables de estado 4 2 2.5 Alumno: Efrén Martínez Bautista CIDESI La siguiente Fig. muestra la variable deslizante 2.5 2 1.5 1 0.5 0 0 1 2 3 4 5 6 7 8 9 10 t Fig. 5: Variable deslizante Finalmente se gráfica el control u Control u 1.5 u 1 0.5 u 0 -0.5 -1 -1.5 0 1 2 3 4 5 6 7 8 t Fig. 6: Sistema con control u y función sign 5 9 10 d) Identificar las cantidades que llegan a cero en tiempo finito y las que se acercan a cero asintóticamente. La función σ tiende a cero en tiempo finito, y los estados x1 y x2 tienden a cero asintóticamente. 2. Repita el ejercicio anterior aproximando la función sign en la ley de control por la función σ sigmoid, sign(σ) ≈ |σ|+ϵ y por separado por la función saturación. 1 if σ > ϵ σ if |σ| ≤ ϵ sign(σ) ≈ ϵ −1 if σ < −ϵ El comportamiento de la superficie deslizante y la convergencia asintótica de las variables de estado es la misma que en el caso anterior, la diferencia se nota en el control, ahora el resultado de la gráfica utilizando la función aproximación es Control u aprox sign 1.4 u 1.2 1 0.8 u 0.6 0.4 0.2 0 0 1 2 3 4 5 6 7 8 9 10 t Fig. 7: Sistema con control u y con función aproximación de sign Para la función saturación se implemento el siguiente código en MATLAB function sign_01 = fsign(sigma) % Función saturación s_sigma = sigma(1); epsilon = 0.01; if s_sigma > epsilon sign_01 =1; elseif abs(s_sigma) <= epsilon 6 Alumno: Efrén Martínez Bautista CIDESI sign_01 = s_sigma/epsilon; elseif s_sigma <-epsilon sign_01 =-1; end end Fig. 8: Sistema con ley de control u y función saturación El comportamiento de la superficie deslizante y la convergencia asintótica de las variables de estado es la misma que si se utilizará la función sign y la función de aproximación, lo que cambia es la gráfica de la ley de control, la cuál es Control u aprox sign 1.5 u función saturación 1 u 0.5 0 0 1 2 3 4 5 6 7 8 9 t Fig. 9: Sistema con control u y función saturación 7 10 Finalmente, en la siguiente Fig. se muestra la comparación de la ley de control utilizando función aproximación y función saturación. Control u aprox sign 1.5 u aproximación u función saturación 1 u 0.5 0 0 1 2 3 4 5 6 7 8 9 10 t Fig. 10: Control u con función aproximación vs control u con función saturación 8