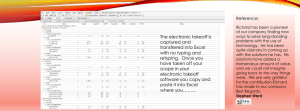
")
FOREWORD Conversations with colleagues, discussions during cruise flight coupled with my experiences when conducting performance courses in the classroom have led me to draw the conclusion that aircraft performance is not easily understood by airline pilots in their daily operation. Aircraft manufacturers and airlines provide pilots with numerous performance data but it is not always clear when or how this should be used. It is because of this that the wish arose for a small guide containing all the performance rules which might be faced by aircrew both occasionally and on a daily basis. This Performance Reference Handbook (PRH) is the result. This handbook contains European (EASA) performance regulations applicable to large civil twin-jet aircraft in general and the related data plus application for the Boeing 737 NG specifically. It is complete with many clarifying pictures and flowcharts, as we pilots prefer. In addition, due to its handy size it will easily fit into your flight bag. Anyway, I hope that this PRH will assist in making performance calculations and related decisions and help you become more familiar with what specific performance data represents. Moreover, the computerised era has dawned and this affects many of us, influencing performance calculations with laptop tools and EFB. The lack of transparency in computerisation means that many pilots will lose their overview of this aspect of the operation. So with respect to the PRH, use, enjoy and don’t hesitate to criticise it, because I’m looking forward to any remarks, comments and/or feedback! Maurits Hulshof Aeronautical Engineer BSc. CPT/TRI 737NG Order and update info You can order your own copy of the PRH from www.performance737.com. The PRH is available as hard-copy (A5-size, full color or B/W, coilbound) or as ebook. An FAA edition is also available. This site will also inform you about updates. Language In accordance with the Boeing Manuals, this PRH is written in US English. However, the EU-OPS regulations, which are quoted exactly, are written in UK English. E.g. you may find the word “airplane” (as text) as well as “aeroplane” (as quote) in this handbook. Where the pronoun ‘he’ is used in the PRH, the pronoun ‘she’ could be inferred. Disclaimer Although a major part of the contents of this handbook consists of regulatory data, the PRH is not authorized by any airline, local aviation authority, or by the manufacturer of the 737NG. Although this guide has been put together carefully, the author guarantees neither currency nor accuracy and cannot be held responsible for faults. Therefore company, manufacturer and state procedures must always take precedence over this handbook. Contact For any remark, comment, feedback or error reporting, please contact: prh@performance737.com. Copyright © 2014 M.M.Hulshof All rights reserved. No part of this publication may be reproduced or transmitted in any form without the explicit written permission of the author. Cover Design and photograph © by the author. INTRODUCTION Every public transport aircraft taking off has to meet several minimum performance requirements in order to be able to reach an acceptable level of safety throughout the flight from takeoff to the subsequent landing. These minimum requirements, with respect to aircraft performance, are laid down in aviation regulations which cover both the aircraft certification and operation. Worldwide there are two major aviation rulemaking organizations, EASA and FAA. EASA, the European Aviation Safety Agency, established in 2003 and absorbed the JAA (Joint Aviation Authorities) by 2008, develops, adopts and implements requirements concerning aircraft design, certification, operation, maintenance and crew licensing. Certification requirements for large civil aircraft, as is the Boeing 737NG, are laid down in Part 25 of EASA’s Certification Specifications (CS-25), replacing the former JAR-25 (Joint Aviation Requirements), and almost identical to the FAA (USA’s Federal Aviation Administration) equivalent FAR-25. Operating requirements are documented in EU-OPS. This edition of the PRH reflects the EASA aircraft performance regulations recognized in CS-25 and EU-OPS. Acceptable Means of Compliance (AMC) and Interpretative / Explanatory Material (IEM) form a part of these regulations and are also referenced. (An FAA edition of the PRH is also available on www.performance737.com.) This handbook contains 4 parts: Part A: Basic Performance Notes covers and explains regulatory (EASA) requirements. Part B: Performance Data 737NG covers the manufacturer's supplied performance data which are normally available to pilots, and explains data adjustments. Part C: 737NG Performance Data Application contains a practical as to how the available performance data have to be applied, both in logical steps and in flowcharts, and contains additional operational information. Part D: Appendices includes snowtam and runway state decoder, glossary, and abbreviation list. LEGEND Explanations of the icons, dimensions and quotations used in this PRH. Icons Action or Check Additional information Allowance Attention Definition Equation, Formula or Statement Restriction Dimensions ° degree " inch C Celsius F Fahrenheit ft feet Hg mercury g gravity hPa hectoPascal (millibar) K 1000lbs (Engine thrust rating) m meter mm millimeter mph miles per hour kts knots sec second Quotations CS-25.xxx Quotation of EASA’s Certification Specification Part 25. AMC-25.xxx Quotation of EASA’s CS Part 25 Acceptable Means of Compliance. CS-AWO xxx Quotation of EASA’s CS Part All Weather Operations. EU-OPS 1.xxx Quotation of EASA’s Operational Requirements. IEM-OPS 1.xxx Quotation of EU-OPS’s Interpretative Explanatory Material. PANS-OPS xxxx Quotation of ICAO’s Procedures for Air Navigation Services – Aircraft Ops. CFM Quotation of the manufacturer of the CFM56 engine. 1. TAKEOFF SPEEDS DEMONSTRATED AND OPERATIONAL SPEEDS 1.1. DEMONSTRATED TAKEOFF SPEEDS Four speeds are demonstrated during the certification process: the stallspeed (VS), the minimum unstick speed (VMU) and the minimum control speeds on the ground (VMCG) and in the air (VMCA). 1.1.1. Stall speed – VS Stall speed (VS): The minimum steady flight speed at which the airplane is controllable. Corresponds to the point where the lift can no longer be sustained. VS1G is the one-g stall speed corresponding to the maximum liftcoefficient (CL) where the loadfactor is still equal to 1 (i.e. just before the lift starts decreasing with increasing angle of attack AOA). VS1G > VS The stall speed used in airplane certification is the reference stall speed, VSR. CS-25.103 The reference stall speed VSR is a calibrated airspeed defined by the applicant. VSR ≥ VS1G 1.1.2. Minimum Unstick speed – VMU CS-25.107 VMU is the calibrated airspeed at and above which the aeroplane can safely lif Demonstrated in flight tests. Determined at the maximum angle of attack that is physically attainable by the aircraft while on the ground. 1.1.3. Minimum Control speeds 1.1.3.1. Minimum control speed - Ground – VMCG CS-25.149VMCG, the minimum control speed on the ground, is the calibrated airspeed du Crew must be able (without any special skill required) to arrest the lateral motion caused by an engine failure within 30 feet of the runway centerline, using only aerodynamic controls (no nosewheel steering). VMCG is determined with: the remaining engine at maximum takeoff thrust (bleeds off) most unfavorable (farthest aft) center of gravity maximum takeoff weight airplane trimmed for takeoff In determining the minimum control speeds the effects of crosswind are not taken into account. 1.1.3.2. Minimum control speed - Air – VMCA CS-25.149VMC is the calibrated airspeed, at which, when the critical engine is suddenly m Maximum 20° heading change during the recovery (without special skill required) is allowed. VMCA is determined with: the remaining engine at maximum takeoff thrust (bleeds off) most unfavorable (farthest aft) center of gravity maximum takeoff weight aircraft trimmed for takeoff most critical configuration but with gear up negligible groundeffect VMCA ≥ 1.2 VS 1.2. OPERATIONAL TAKEOFF SPEEDS From the demonstrated speeds the following operational speeds are derived: 1.2.1. Takeoff Decision speed - V1 Takeoff Decision speed (V1): The speed used as a reference in the event of engine or other failure in deciding whether to continue or reject the takeoff. CS-Definitions V1 means the maximum speed in the take-off at which the pilot must take Regulations require a single value of V1 for the rejected and continued takeoff. Regulations account for one second of recognition and reaction time between VEF, the speed at which the event is assumed to take place, and the pilot’s first action to reject the takeoff. CS-25.107VEF is the calibrated airspeed at which the critical engine is assumed to fail. VE V1 ≥ VEF ≥ VMCG Minimum V1 is equal to VMCG. This minimum allowable V1 is referred to as: V1MCG. Maximum V1 is equal to VMBE and may not exceed VR. Maximum Brake Energy speed(VMBE): The highest takeoff decision speed from which the airplane may be brought to a stop without exceeding the maximum energy absorption capability of the brakes. VMCG ≤ V1 ≤ VR or VMBE 1.2.2. Rotation speed - VR AMC-25.111(b)Rotation speed, VR, is intended to be the speed at which the pilot initiates Chosen such, that given a normal rotation rate of three degrees per second, the aircraft will achieve V2 at the screenheight at the end of the runway if an engine fails at VEF. Results in a safe liftoff speed VLOF. CS-25.107 VLOF is the calibrated airspeed at which the airplane first becomes airborne. VR ≥ 1.05 VMCA VLOF ≥ 1.1 VMU(N) or 1.05 VMU(N-1) 1.2.3. Takeoff Safety speed - V2 CS-DefinitionsTake-off safety speed means a referenced airspeed obtained after liftoff at w Takeoff Safety speed(V2): The target speed to be reached at the screenheight, assuming an engine failure at or after V1. Selected by the certification applicant and is the speed at which the one engine inoperative second segment climb performance is demonstrated. [PRH A2.3.1.2. Second segment] Not necessarily the absolute minimum safety speed for one engine inoperative, since a higher speed may provide better climb performance and may also be scheduled to reduce the tail-strike risk on long-body aircraft. V2 ≥ 1.13 VS1G and 1.1 VMCA 1.2.4. Various influences on operational speeds V1 Weight A higher weight requires more lift to be produced. For the conti Density (OAT/PA) A lower density (higher OAT or PA) results in less lift force whi Flap Setting A higher flapsetting produces more lift which allows a lower V1 Runway Slope A downslope requires a lower V1 because it hurts the stopping c Wind More tailwind requires a lower V1 because it hurts the stopping OVERVIEW TAKEOFF SPEEDS 2. TAKEOFF PERFORMANCE REQUIREMENTS MAX ALLOWABLE TAKEOFF WEIGHT 2.1. MAXIMUM ALLOWABLE TAKEOFF WEIGHT The maximum weight the aircraft is allowed to takeoff with is limited by: - legal performance requirements – resulting in a Performance Limit TOW (PLTOW), which may be further restricted by MEL requirements, and - a weight taking the airframe structure into account – the Maximum Certified Structural TOW. The Max Allowable TOW is determined by the most limiting of the PLTOW and the Maximum Certified Structural TOW. The Max Allowable TOW may be further restricted by the Max Allowable LDW [PRH A3-2. Landing performance requirments - Dispatch] plus the weight of the tripfuel. 2.1.1. Maximum Certified Structural TOW Structural weight: The maximum weight the airframe, landing gear and wings can support. Specified by the manufacturer but may be lowered by the airline company for economical reasons (ATC and landingfees are based on this weight). 2.1.2. Performance Limit TOW Requirements which determine the PLTOW are considering the: Field Length - to ensure that, following an engine failure at the most critical moment, the aircraft can either safely continue or reject the takeoff on the available runway length - resulting in the Field Length Limit TOW. [PRH A1-2.2. Field length requirement] Climb - to ensure that the aircraft has sufficient climb capability in all phases of the takeoff - resulting in the Climb Limit TOW. [PRH A1-2.3. Climb requirement] Obstacle Clearance - to ensure that the aircraft is able to clear all obstacles with the required margin - resulting in the Obstacle Limit TOW. [PRH A12.4. Obstacle clearance requirement] Tire Speed - to ensure that the maximum speed on the ground prior to liftoff does not exceed the maximum certified tire speed - resulting in the Tire Speed Limit TOW. [PRH A1-2.5. Tire speed requirement] Brake Energy - to ensure that the maximum amount of energy which the brakes can absorb in the event of a rejected takeoff will not be exceeded resulting, for a given runway, in the Brake Energy Limit TOW. [PRH A12.6. Max brake energy requirement] Regulations require the PLTOW to be determined taking certain environmental elements into account. REQUIRED ENVIRONMENTAL CONDITIONS[EU-OPS 1.490] Not more than 50% of OVERVIEW MAXIMUM ALLOWABLE TOW 2.2. FIELD LENGTH REQUIREMENT The maximum takeoff weight with respect to field length is restricted by two specific requirements which ensure that the aircraft has sufficient performance for the actual runway available. Accelerate-Stop Distance Required must not exceed Accelerate-Stop Distance Available. [PRH A1-2.2.1. Accelerate Stop Distance] ASDR ≤ ASDA Takeoff Distance Required must not exceed Takeoff Distance Available. [PRH A1-2.2.2. Takeoff Distance] TODR ≤ TODA The accelerate-stop distance requirement will result in a Accelerate-Stop Distance (ASD) Limit TOW and the takeoff distance requirement will result in a Takeoff Distance (TOD) Limit TOW. The Field Length Limit TOW is the most restrictive (lowest) of the ASD Limit TOW and the TOD Limit Weight. In the following definitions and figures TORA is defined as: EU-OPS 1.480Take-off run available (TORA): The length of runway which is declared av 2.2.1. Accelerate Stop Distance Aircraft must be able to safely abort the takeoff following an event at VEF. Accelerate Stop Distance Required (ASDR): The required distance to accelerate with all (N) engines operating to V1 (including 1 second recognition time between VEF and V1) plus the required distance to travel 2 seconds at constant speed V1 (to allow for the transition from acceleration to the stopping configuration) plus the required distance to decelerate from V1 to a full stop. In determining the ASDR on a dry runway, no credit for reverse thrust during the RTO is allowed, however, regulations do allow the credit for reverse thrust on a wet or contaminated runway. The use of speedbrake is always credited. For a given runway the Accelerate-Stop Distance Limit Weight is the weight for which ASDR equals ASDA. At this limit weight the aircraft will just be able to stop within the ASDA, when maximum braking action is initiated at the latest by V1, with only the use of speedbrake on a dry runway, and with the additional use of one T/R on a wet or contaminated runway. Of course, when actually rejecting a takeoff on a dry runway, the T/R should be used. CS-25.101The accelerate-stop (…) distances (…) must be determined with all the aeroplan Regulation require certification of takeoff performance on a wet runway be based on tire tread depths of 20% (which is about 2mm) of a new tire. ASDA may be increased by a stopway. EU-OPS 1.480Accelerate-stop distance available (ASDA): The length of the take-off run a Accelerate Stop Distance for a certain TOW 2.2.1.1. Stopway CS-DefinitionsStopway means an area beyond the take-off runway, no less wide than the r The maximum takeoff weight of an aircraft may be increased by using the stopway to increase the ASDA when calculating Field Length Limit TOW. There is no limit on the length of the available stopway that may be used in calculating Field Length Limit TOW, except that V1 may never exceed the maximum tire speed (VTIRE). RESA [Overview clearway-stopway] may not be used as stopway in performance calculations. 2.2.2. Takeoff Distance Also referred to as Accelerate-Go Distance. Aircraft must be able to safely continue the takeoff following an engine failure at VEF, and reach V2 at a screenheight of 35 feet at the end of the runway. Aircraft must also be able to safely take off with all engines operating. Takeoff Distance Required (TODR): the higher of: The required distance to accelerate with all (N) engines operating to VEF,plusthe required distance to accelerate with one engine inoperative (N-1) to V2 at a screenheight of 35 feet above the takeoff surface,and One Engine Inoperative Takeoff Distance for a certain TOW The required distance to accelerate with all (N) engines operating to a screenheight of 35 feet, plus a distance margin of 15%. All Engine Takeoff Distance for a certain TOW For a 2 engine aircraft the one engine inoperative takeoff distance requirement is normally more limiting than the all engine takeoff distance requirement. Only in the one engine inoperative case, the screenheight may be reduced to 15 feet when the runway is wet or contaminated. In the all engine takeoff case the speed at the 35 feet point will be greater than the scheduled safe flying speed, V2. For a given runway the TOD Limit Weight is the weight for which TODR equals TODA. At this limit weight a 2 engined aircraft will just be able to reach the required screenheight at the end of the TODA, when the takeoff is continued following an engine failure at VEF. TODA may be increased by a clearway which does not exceed half the TORA. EU-OPS 1.480Take-off distance available (TODA) The length of the take-off run available EU-OPS 1.490 The takeoff distance must not exceed the takeoff distance available, with a 2.2.2.1. Clearway CS-DefinitionsClearway means an area beyond the runway, not less than 152 m (500 ft) w The maximum takeoff weight of an aircraft may be increased by using the clearway to increase the takeoff distance available when calculating Field Length Limit Weight. The clearway plane extends from the end of the runway with an upward slope not exceeding 1.25% above which no object or terrain protrudes (except threshold lights with max height 0,66m (26”) if located at each side of the runway). Maximum allowable clearway which may be used in takeoff performance calculations equals half the takeoff flare distance (where the flare distance is the distance along the ground from the point where the aircraft is at the liftoff speed to the point where the aircraft reaches the screenheight) and may not exceed half the TORA. Takeoff Flare Distance Max Allowable CWY ≤ ½ T/O Flare Distance ≤ ½ TORA Because of the reduced screenheight, regulations do not allow the use of a clearway on a wet runway (The use of a clearway on a contaminated runway is not addressed by regulations). RESA [Overview clearway-stopway] may not be used as clearway in performance calculations. 2.2.3. Line-up Correction Line-up corrections: The adjustments made to the available runway length to account for the fact that some of the runway length is used for aligning the aircraft on the runway prior to beginning the takeoff roll. Required to be taken into account any time the access to the runway does not permit positioning of the aircraft at the runway threshold [EU-OPS 1.490]. Assumes positioning of the aircraft taking the minimum edge safety distance of the landing gear (10 feet for B737) into account. Both ASDA and TODA needs to be corrected: ASDA correction: distance from threshold to nosegear. TODA correction: distance from threshold to maingear. Line-up corrections Generally pilots are provided with takeoff data in which line-up corrections are already implemented, therefore normally no additional corrections by crew are required. 2.2.4. Balanced Takeoff For a given runway (fixed ASDA en TODA), selection of V1 is dependent on the TOW (Graph 1). Subsequently, for a given (fixed) TOW, both ASDR and TODR are influenced by selection of V1 (Graph 2). For a given runway, maximum TOW will be achieved when V1 is selected such, that the ASDR and the TODR for that TOW are equal (balanced) – at the intersection of the two lines in Graph 1. This V1 is called Balanced V1 and corresponding TOW is called Balanced (Takeoff) Weight. For better understanding, graphs give a simplified presentation. Graph 1 ~ TOW VS. V1: The RED line shows the relationship between TOW and V1, for a given ASDA, in case of a discontinued takeoff. To limit the amount of energy at the moment the decision to stop is made, a high TOW requires a low V1, in order to be able to stop within the ASDA. Subsequently, a low TOW allows a high V1. The GREEN line shows the relationship between TOW and V1, for a given TODA, in case of a continued takeoff. To limit the acceleration on 1 engine from V1 to V2, a high TOW requires a high V1, in order to be able to reach V2 at the screenheight at the end of the TODA. Subsequently, a low TOW allows a low V1. For a given (fixed) TOW, the required field length is determined by ASDR and TODR. The lowest required field length is reached where ASDR equals TODR – at the intersection of the two lines in Graph 2. This is called the Balanced Field Length. Graph 2 ~ Field length (TODA/ASDA) VS. V1: The RED line shows the relationship between required field length (ASDR) and V1, for a given TOW, in case of a discontinued takeoff. Due to the lower amount of energy at the moment the decision to stop is made, a low V1 results in a shorter ASDR, contrary to a high V1. The GREEN line shows the relationship between required field length (TODR) and V1, for a given TOW, in case of a continued takeoff. Due to the longer acceleration on 1 engine from V1 to V2, a low V1 results in a longer TODR, contrary to a high V1. Balanced Field Length: ASDR = TODR 2.2.4.1. Unbalancing Unbalancing: Using any value other than balanced V1. Unbalancing is optional when not field limited, but may be required when field limited (in case clearway ≠ stopway). 2.2.4.1.1. Optional unbalancing Balanced V1 requires the lowest runway length (balanced field length), but if the actual runway is greater than the balanced field length, a range of V1 is available (Graph 3). Graph 3~ Available V1-range for a given TOW: The dotted yellow line in the graph shows the required runway length which is at its minimum (and equal to the balanced field length) when using balanced V1. If V1 is set to the lower limit, the aircraft will stop well before the end of the runway in case of a rejected takeoff, following an event at VEF, but it would only just be possible to reach V2 at the screenheight at the end of the runway in case of a continued takeoff, following an engine failure at VEF. If V1 is set to the upper limit, the aircraft will reach V2 at the screenheight well before the end of the runway in case of a continued takeoff, following an engine failure at VEF, but it would just be possible to stop at the end of the runway in case of a rejected takeoff following an event at VEF. Other than balanced V1 may be used to: increase V1 to above VMCG in order to increase V1MCG Limit TOW. reduce V1 to below VMBE in order to increase Brake Energy Limit TOW. Even with a range of V1 available, the absolute upper and lower limit still applies: V1 may not exceed VR because no takeoff may be rejected after rotation. V1 may not be less than VMCG. 2.2.4.1.2. Required unbalancing ASDA may be increased with a stopway and TODA may be increased with a clearway in order to increase the TOW. But if stop- and clearway are not equal, there is no balanced takeoff situation. To use the higher TOW resulting from the use of clearway and/or stopway, V1 has to be adjusted to be able to meet the requirements for stop and go. This V1 correction is a function of the difference between clearway and stopway. Two situations are distinguished: Clearway > Stopway: In case clearway exceeds stopway, V1 needs to be lowered. Starting from the balanced situation, an aircraft with the higher TOW, resulting from the increased TODA, still needs to be stopped within the (unchanged) ASDA. Extreme situation with clearway and no stopway Clearway > Stopway: decrease V1 Stopway > Clearway: In case stopway exceeds clearway, V1 needs to be increased. Starting from the balanced situation, an aircraft with the higher TOW, resulting from the increased ASDA, must still be able to reach V2 within the (unchanged) TODA. Extreme situation with stopway and no clearway Stopway > Clearway: increase V1 2.2.4.2. Rebalancing Actual conditions which differ from the situation for which V1 is published (level/dry runway at SL, standard day, no wind) require adjustment of V1 in order to maintain a balanced takeoff. Conditions causing reduced stopping capability require a lower V1. The ASDA becomes more restrictive – the decision to abort the takeoff has to be made earlier to guarantee a safe stop before the end of the runway. Possible conditions: Runway surface not being dry Downsloping runway (see also below) Inoperative equipment affecting the aircrafts ability to stop (eg. T/R inop) Reduced stopping capability requires a lower V1 Reduced stopping capability: decrease V1 Conditions causing reduced acceleration capability require a higher V1. The TODA becomes more restrictive - the decision to continue the takeoff must be made at a higher speed to make the (reduced) acceleration on one engine shorter so that V2 can be reached within the TODA. Possible conditions: Less available thrust due to high airport elevation or high (actual or assumed) OAT Upsloping runway Deposits on the runway causing drag (eg. slush, standing water) Reduced acceleration capability requires a higher V1 Reduced acceleration capability: increase V1 Rebalancing V1 requires a longer balanced field length and must therefore be accompanied by a weight reduction, in order to equal the rebalanced field length to the standard balanced field length. EXCEPTION: the reduced deceleration capability of a downslope might be more than compensated by its increased acceleration capability, resulting in a rebalanced fieldlength shorter than the balanced fieldlength, allowing a higher Field length limit takeoff weight. 2.2.5. Runway Surface Conditions 2.2.5.1. Dry Runway EU-OPS 1.480A dry runway is one which is neither wet nor contaminated, and includes th Grooved or porous friction course runway: A paved runway that has been prepared with lateral grooving or a porous friction course (PFC) surface to improve braking characteristics when wet. EU-OPS 1.475For performance purposes, a damp runway, other than a grass runway, may EU-OPS 1.480A runway is considered damp when the surface is not dry, but when the mo Damp is a runway condition when the runway is drying up following rain or when covered with morning dew as indicated by a color change. A damp runway or a wet grooved or PFC (Porous Friction Course) runway may not yield the same level of performance as a dry runway. 2.2.5.2. Wet Runway EU-OPS 1.480A runway is considered wet, when the runway surface is covered with wate A runway is considered wet as soon as it has a shiny appearance, but without risk of hydroplaning due to standing water (or other fluid) on any part of its surface. The aircraft's acceleration is not affected, but the stopping capability is degraded due to the reduction in tire to ground friction, therefore: V1 needs to be rebalanced to a lower value in order to be able to stop the aircraft before the end of the runway in case of a discontinued takeoff. [PRH A1-2.2.4.2. Rebalancing] Field Length Limit TOW needs to be lowered, in order to reduce the increased balanced field length, resulting from the rebalanced V1, to within the runway limits. Credit for the use of reverse thrust on the operative engine during an aborted takeoff following an engine failure is allowed. The screen height to be reached at the end of the takeoff distance is lowered to 15 feet (instead of 35 feet on a dry runway). Same TODR and ASDR for dry and wet runway takeoff Because of the lower screenheight, the use of clearway on a wet runway is not allowed. The TOW on a wet runway must not exceed that permitted for a takeoff on a dry runway under the same conditions. Therefore a Dry Check is required to exclude the theoretical possibility that, due to credits for reverse thrust and use of a reduced screen height, a higher takeoff weight is obtained on a wet runway than on a dry runway, which is not allowed. 2.2.5.3. Contaminated Runway EU-OPS 1.480 A runway is considered to be contaminated, when more than 25% of the ru Surface contaminants can be classified as: fluid and hard contaminants. 2.2.5.3.1. Fluid Contaminants Fluid contaminants: Contaminants with a measurable depth which are drag producing and tire braking friction reducing. Aircraft runs through the contaminant, causing drag and reducing braking friction, affecting both acceleration and deceleration. Drag is caused by displacement of the contaminant and by impingement of the displaced contaminant spray on the fuselage and/or wings. Airplane tire on runway contaminated with fluid contaminant The slush drag force (FSLUSH) increases with the square of the aircraft’s groundspeed (VG) and peaks just above the hydroplaning speed (VHP) - speed at which the tire starts to lift out of the fluid contaminant (resulting in ineffective wheelbrakes) - and then decreases with further speed increase. VHP = 8.63√P [P is tire pressure in psi] B737 hydroplaning speed is approximately 120 kts. Hydroplaning (Aquaplaning): Partial or total loss of contact and friction between the tire and the runway which occurs when the tire cannot squeeze anymore of the fluid contaminant layer between its tread and lifts off the runway surface. To assure a safe operation from a runway contaminated with a fluid contaminant, the TOW needs to be reduced to compensate for the reduced acceleration capability and the reduced braking capability. Since the reduced stopping capability (requiring a lower V1) is more significant than the reduced acceleration capability (requiring a higher V1), V1 needs to be rebalanced to a lower value [PRH A1-2.2.4.2. Rebalancing], but the V1adjustment becomes less negative with increasing contaminant depth due to increasing significancy of the reduced acceleration capability. Contaminants of this kind are: Standing water EASA/AMC-25.1591Water of a depth greater than 3mm. Specific gravity: Relative density defined as the ratio of the density of a given substance to the density of water when both substances are at the same temperature. Substances with a specific gravity greater than 1 are more dense than water, and those with a specific gravity of less than 1 are less dense than water. Expressed as a dimensionless value. Typical temperature is above 0°C (32°F) Slush EASA/AMC-25.1591Partly melted snow or ice with a high water content, from which wat Normally a transient condition found only at temperatures close to 0°C (32°F). Wet snow EASA/AMC-25.1591 Snow that will stick together when compressed, but will not readily Typical temperature for wet snow to be present is between -5°C (23°F) and -1°C (30°F). Dry (loose) snow EASA/AMC-25.1591 Fresh snow that can be blown, or, if compacted by hand, will fall ap The assumption with respect to specific gravity is not applicable to snow which has been subjected to the natural ageing process. Typical temperature for dry (loose) snow to be present is below -5°C (23°F). 2.2.5.3.2. Hard contaminants Hard contaminants: Solid contaminants with no measurable depth (depth is not relevant) which are tire braking friction reducing. Aircraft runs on the contaminant, causing only reduced braking friction (no extra drag), affecting only the deceleration. Airplane tire on runway contaminated with hard contaminant To assure a safe operation from a runway contaminated with a hard contaminant, the TOW needs to be reduced to compensate for the reduced braking capability and V1 needs to be re-balanced to a lower value. Contaminants of this kind are: Compacted Snow EASA/AMC-25.1591Snow which has been compressed into a solid mass such that the aer Ice EASA/AMC-25.1591Water which has frozen on the runway surface, including the conditi 2.2.5.3.3. Regulation allowances and restrictions on contaminated runways Regulation allowances to reduce the performance effects (which result in a weight penalty) on contaminated runways: Credit for the use of reverse thrust on the operative engine during an aborted takeoff following an engine failure is allowed. The screen height to be reached at the end of the takeoff distance is lowered to 15 feet (instead of 35 feet on a dry runway). Regulation restrictions: The use of Assumed Temperature reduced thrust is not allowed on contaminated runways. 2.2.5.3.4. V1MCG Limit Weight If V1 is adjusted to compensate the reduced braking capability on a contaminated runway, a check is required to ensure that the adjusted V1 is not less than VMCG. If the adjusted (required) V1 is lower than VMCG, it must be set equal to VMCG. In such a case, the resulting (higher) V1MCG requires more runway length than was required for the adjusted V1. If the increased required length exceeds the ASDA, the takeoff weight must be limited in order to be able to stop within the ASDA limits in case of a RTO. For a given available runway length (ASDA), there will be a limit weight for which V1 is equal to VMCG: V1MCG Limit Weight. FCOM/PI provides V1MCG limit weights and it must be checked that this weight is not exceeded. V1MCG Limit Weight: The maximum weight for which the airplane can accelerate to VMCG and just be able to stop within the available accelerate stop distance. V1MCG Limit Weight If VMCG limited, the use of Derated (not Reduced) takeoff thrust might increase V1MCG Limit Weight. 2.2.5.3.5. Additional considerations Because the contamination on the runway is only influencing the aircraft while still on the ground, the reduced Field Length Limit TOW will result in a higher climb capability, hence greater obstacle clearance, once the aircraft is airborne. Better climb performance due to reduced (Field Limit) TOW Regulations do not address the use of clearway on a contaminated runway, but consider the following: Applying the contaminated runway performance adjustments to the dry Field Length Limit TOW, the reduced TOW, along with the associated V1 adjustment, results in the same TODR to reach 15 feet as the dry Field Length Limit TOW would take to reach 35 feet. So, if the dry Field Length Limit TOW takes credit for clearway, the height over the end of the runway following an engine failure at the critical point will be lower than 15 feet. In fact, the height over the end of the runway could be as low as zero at the liftoff end of the runway. Possible low runway end crossing height on contaminated runway 2.3. CLIMB REQUIREMENT Regulations require minimum climb gradients in the takeoff flight path, assuming an engine failure at VEF under NO WIND conditions. 2.3.1. Takeoff Flight Path The takeoff path can be divided into the takeoff distance and the takeoff flight path. The climb requirement addresses the takeoff flight path. CS-25.111 The take-off path extends from a standing start to a point at which the aeroplan CS-25.115 The takeoff flight path begins 35 ft above the take-off surface at the end of the Boeing takes minimum clean speed (VREF40 + 70kts) as final takeoff speed. The takeoff flight path is divided into 4 segments, each being characteristic of a distinct change in configuration, thrust and speed, based on performance without groundeffect and zero-wind conditions. Per segment, regulations require a minimum climb gradient, assuming an engine failure at VEF under NO WIND conditions. Any of these climb requirements may limit the maximum TOW. If a requirement cannot be met, TOW must be reduced until the aircraft climb performance meets the climb requirements (Climb Limit TOW). Climb Limit TOW: A takeoff weight which is limited by the ability of the airplane to achieve the minimum required climb gradient with one engine inoperative in still air. Climb gradient: The ratio, expressed as a percentage, of the change in geometric height divided by the horizontal distance travelled in a given time. As a rule of thumb, the actual climb gradient can be checked in flight by dividing the actual vertical speed (in ft/min) by the actual groundspeed (in kts). 2.3.1.1. First Segment Extends from the end of the takeoff distance to the point where the landing gear is assumed to be fully retracted, using takeoff flaps at a constant V2 speed. Thrust of remaining engine is at TO/GA thrust. 1st Segment: Required Climb Gradient > 0 [CS-25.121 (this requirement is applicable from liftoff)] 2.3.1.2. Second Segment Extends from the gear up point to a gross height of at least 400 feet (max 1500 feet), using takeoff thrust on the remaining engine and takeoff flaps at a constant V2 speed. 2nd Segment: Required Climb Gradient ≥ 2.4% [CS-25.121] For a 2-engine aircraft, this requirement is typically the most limiting. May be extended above 1500 feet AAL to clear obstacles in the 3rd segment, provided MCT is sufficient to maintain the required climb gradient in the 3rd segment. 2.3.1.3. Third Segment The horizontal distance required to accelerate, at constant altitude using takeoff thrust on the remaining engine, to the final climb speed while retracting flaps in accordance with the recommended speed schedule. According CS-25.111 the available climb gradient above 400 feet AAL must be a minimum of 1.2%.This requirement can be transformed into a level acceleration. 3rd Segment: Level acceleration Level-off height is determined by: Regulations: Minimum 400 feet AAL Company policy Obstacles TO/GA thrust time limit: The use of TO/GA thrust is normally limited to 5 minutes. For single engine operations this time limit may be increased to 10 minutes, provided the availability of an AFM Appendix where this is stated. If TO/GA thrust is needed to maintain the required gradient capability, the time limit on the use of TO/GA thrust defines the maximum level-off height. If TOW is limited by the TO/GA thrust time limit, MTOW will be increased by the use of improved climb. If MCT is sufficient to maintain the required gradient capability, the 2nd segment may be extended beyond this maximum level-off height – Extended Second Segment – which can be used to clear obstacles that lie in the 3rd segment. 2.3.1.4. Final Segment Extends from the end of the third segment to a gross height of at least 1500 feet, with flaps up, maximum continuous thrust on the remaining engine and at final climb speed. Final Segment: Required Climb Gradient ≥ 1.2% [CS-25.121] Final segment, and thereby the takeoff (flight) path, is completed when the aircraft has reached 1500 feet AAL or the altitude at which the transition from the takeoff to the enroute configuration is completed and VMINCLEAN is reached, whichever is higher. 2.3.2. Improved Climb Improved Climb: Trading excess runway for higher takeoff speeds to increase the aerodynamic efficiency, resulting in better climb performance. Only applicable when takeoff performance is not limited by the field length requirement, leaving excess runway available. This improved climb capability can be used to increase Climb Limit TOW and might also increase the Obstacle Limit TOW. To achieve the higher V2, the rotation speed, VR, must be increased. Due to the increased weight, V1 must be increased to ensure that, if an engine fails at VEF, the aircraft has sufficient speed to continue the takeoff. Speeds can be increased up to the point where the Field Length Limit TOW and Tire Speed Limit TOW becomes more limiting than the Climb Limit TOW. If the resulting V1 exceeds VMBE the improved TOW must be adjusted. Because improved climb speeds are higher than the standard takeoff speeds, the takeoff speeds from FMC and FCOM cannot be used and have to be obtained from the FPPM or a special TL chart. 2.3.2.1. Advantages of improved climb The primary benefit of improved climb is the increase in Max Allowable TOW when the performance is limited by the required climb gradient or obstacles. Instead of a higher weight, the increased performance can also be used to apply less thrust (higher assumed temperature or lower thrust rating). The max assumed temperature where a B737-700/24K becomes climb limited will increase by 8˚ when improved climb is used. A higher VLOF results in an increased tail clearance (higher speed requires lower pitch attitude for the same lift). Eg.B737-900: 5kts VLOF increase requires 1 degree less pitch attitude representing 10 inch increased tail clearance. Distant obstacles become less limiting. Regarding the 10 minute TO/GA-thrust time limit, the end of the third takeoff segment is reached at a higher altitude, allowing a higher maximum level off height. The faster and steeper climb out reduces noise (in duration and intensity) on the ground (except for close-in noise monitoring). Effect of improved climb on obstacle clearance. 2.3.2.2. Disadvantages and restrictions Due to using more excess runway, the RTO stopping margin is reduced. Close-in obstacles can become more limiting. Tire wear increases due to longer ground roll and higher speeds. A higher VLOF decreases the margin to VTIRE (resulting in lower Tirespeed Limit Weight) and a higher V1 decreases the margin to VMBE (resulting in lower Brake Energy Limit Weight). Due to higher speeds, there is an increased chance of being limited by brake energy (which limits V1) or tire speed limitations (which limits VLOF, thus VR). VTIRE might inadvertantly be exceeded by slow rotation. Use of reduced thrust or weight corrections for a contaminated runway, is not allowed in combination with improved climb performance. Dispatch with antiskid inoperative in combination with improved climb is not allowed. OVERVIEW TAKEOFF FLIGHT PATH SEGMENTS 2.4. OBSTACLE CLEARANCE REQUIREMENT All obstacles in the Obstacle Accountability Area (OAA) or Departure Sector have to be taken into account prior to takeoff to ensure that the aircraft will be able to clear them, with one engine inoperative. OAA is defined by the lateral clearance criteria as stated in EU-OPS and extends to the point at which the aircraft attains a net height of 1500 feet AAL. Obstacle Accountability Area for trackchange ≤ 15° For departures with trackchanges > 15°, the OAA is curved along the track and wider (up to a total width of 1800m or 1200m with sufficient NAVAID accuracy). EU-OPS 1.495An operator shall ensure that the net takeoff flight path clears all obstacles b Regulations require that the Net T/O Flight Path clears all obstacles in the Departure Sector by a minimum vertical distance of 35 feet or, if the bank angle is greater than 15°, by 50 feet. Net T/O Flight Path: Theoretical flight path starting at the end of the TODA at 35 feet. Gross T/O Flight Path: Actual flight path with one engine inoperative. For a 2 engine aircraft, regulations require the Gross T/O flight path to have a 0.8% greater penalty than the Net T/O flight path gradient, to account for average pilot skill and average airplane performance. Vertical obstacle clearance requirement Obstacles in the Final Takeoff Segment may be avoided by turning. The most penalizing obstacle determines the Obstacle Limit TOW. 2.4.1. Emergency Turn Where obstacles in the takeoff path would severely disrupt operations, a special Engine Failure Procedure, or Emergency Turn may be developed by the company. PANS-OPS 8168Development of contingency procedures, required to cover the case of en In such a case, a SID deviation point can be identified. [IEM-OPS 1.495] SID deviation point: A specified point on the SID where the engine failure route deviates from the normal departure route. To cover the situation that an engine fails on the SID beyond the SID deviation point, the operator may also define a SID restriction point, since the achievable climb gradient with one engine inoperative may not be sufficient to achieve the required SID gradient. Meeting a SID climb gradient (standard is 3.3%) does not necessarily assure that one-engine-inoperative obstacle clearance requirements are met. SID restriction point: A specified point (or altitude) on the SID after (or above) which following the SID assures sufficient obstacle clearance with one engine inoperative. Note from the graph below that the climb performance (which is a function of excess thrust – i.e. thrust minus drag) with both engines operating is about 4 times better than with one engine inoperative. Therefore the engine failure situation heavily depends on what altitude is already gained on both engines before an engine fails. 2.4.2. Additional Consideration Since takeoff from a wet or contaminated runway is based on a screenheight of 15 feet - where the Gross (actual) Flight Path starts - and the Net flight path is defined to start at the 35 feet point, the aircraft may clear a close-in obstacle with less than 35 feet, but at least with 15 feet.[IEM-OPS 1.495] Obstacle clearance with reduced screenheight 2.5. TIRE SPEED REQUIREMENT Maximum certified tire speed limitation restricts the maximum speed of the aircraft while on the ground (VLOF) which restricts the VR, which in turn restricts the TOW. With a restricted VR, the amount of lift that can be produced to counteract the weight is also restricted, thereby limiting the TOW. Tire Speed Limit TOWrepresents a weight requiring a liftoff speed equal to the tire speed limit. B737 certified tire speed is 225 mph / 195 kts. Reducing VLOF can be performed by: Reducing TOW Increasing takeoff flap setting Tire speeds can be limiting on hot and high airports or when Improved Climb Performance is used. When operating at or near the Tire Speed Limit TOW, a slower rotation than the recommended 2-3°/sec may increase the actual groundspeed at liftoff beyond the certified tire speed limit. 2.6. MAXIMUM BRAKE ENERGY REQUIREMENT Maximum Brake Energy speed(VMBE) represents the maximum speed, for a given TOW, at which the brakes are able to absorb the built-up energy (which is a function of weight and speed) and still be effective. Maximum possible energy absorption occurs at V1 during an RTO, therefore maximum V1 is restricted by VMBE. If V1 exceeds VMBE, reducing V1 can be performed by: Reducing TOW Unbalancing [PRH A1-2.2.4.1. Unbalancing] 3. REDUCED TAKEOFF THRUST SAVING YOUR ENGINES Engines contribute about 66% to the aircraft performance deterioration, therefore: Reducing the takeoff thrust whenever possible is a major tool for pilots to increase engine reliability (improving flight safety) and decreasing (maintenance) costs. Using a lower than full rated (i.e. derated or reduced) takeoff thrust is a way of saving engine life. 3.1. ENGINE CHARACTERISTICS – CFM Notes To meet aircraft performance requirements, the CFM56 engine (mounted on a Boeing 737) is a flat-rated engine: Producing constant TO/GA thrust up to the Flat-Rated Temperature (FRT) or Corner Point OAT. Both N1 and EGT increases with OAT up to the FRT, beyond which N1 decreases and EGT remains constant. FRTCFM56 = ISA + 15°C (27°F) EGT Margin: the difference between the EGT Red Line and the EGT, observed on an engine at TO/GA thrust with OAT greater than the Corner Point OAT. EGT Margin is representative of the engine life: Engine deterioration results in a lower EGT margin and hence lower OAT limit, which increases the possibility of EGT (red line) exceedance. In case the OAT Limit becomes less than the FRT, EGT exceedance may occur during a full thrust takeoff. A decreasing EGT margin increases the fuel burn. CFM: An EGT margin decrease of 10°C (18°F), which corresponds to 3000 engine cycles, Keeping the EGT margin as large as possible will improve the flight safety (less engine deterioration) and lower the maintenance costs due to an increase of the “Time On Wing” (number of cycles before an engine overhaul or replacement is needed). EGT margin of a new CFM56 (27K) engine is about 60°C (108°F). A decrease of 10°C (18°F) per 3000 cycles (from idle to full thrust and back to idle) result in an average Time On Wing of 18000 cycles. Pilot-tools to maintain the highest possible EGT margin are: Allow enough time for the engine to cool down. Insufficient cooling time will result in the high pressure turbine blades scraping the (quicker) cooled engine casing after shutdown, hence increasing the tip clearance (space between the turbine bladetip and the engine housing). Due to the increased air leakage, a larger tip clearance results in a less efficient engine which can be noticed by a higher fuelflow and a decreased EGT margin. CFM: An HP turbine tip clearance increase of 0.25 mm (0.01”) results in a 10°C (18°F) le CFM recommends a cooling time, at or near idle, of at least 3 minutes (taxi time included) after landing. Perform, whenever possible, a reduced thrust takeoff. Lower N1 values result in lower EGTs. CFM: At given OAT, 1% N1 is equivalent to approximately 10°C (18°F) EGT. Reducing engine thrust by assuming a higher than actual OAT also has a positive effect on the EGT, hence EGT margin. CFM: 1°C (2°F) OAT or Assumed Temperature is equivalent to 3.5°C (6°F) EGT. 3.2. TAKEOFF THRUST REDUCTION Anytime the Performance Limit TOW is greater than the Actual TOW, there is a possibility to reduce the takeoff thrust and still meet the regulatory requirements for takeoff performance. PLTOW > Actual TOW: Reduced takeoff thrust possible Two possible ways of reducing the takeoff thrust are by a fixed Derate and by a flexible thrust reduction - the Assumed Temperature Method. 3.2.1. Derated Takeoff Thrust (fixed) EASA/AMC 25-13 Derated take-off thrust, for an aeroplane, is a take-off thrust level less t The engine will be operating at a defined lower thrust rating, just as if the aircraft was equipped with less powerful engines. Derate value can be altered by the crew reprogramming the FMC, but this option might be inhibited to avoid the possibility of an unwanted combination of an assumed temperature with a derate thrust level. Depending on the level of full rated thrust, there are up to two derates possible. Derate thrust level will be considered to be a new maximum and may not be exceeded. DErate is not the same asRErate the engine (change the approved engine thrust) which can be mechanically done by the manufacturer or by maintenance. Since VMCG has to be calculated with maximum TO/GA thrust, a Derate thrust level (lower maximum) results in a lower VMCG, hence a higher V1MCG Limit weight. [PRH A1-2.2.5.3.4. V1MCG Limit Weight] If thrustlevers are advanced to beyond the Derate thrust limit, directional control problems might occur when an engine fails during the takeoff roll. Disadvantage: for each of the available thrust ratings, separate data (TL-charts) must be available in order to select the appropriate derate. 3.2.2. Reduced Takeoff Thrust - Assumed Temperature Method (ATM) EASA/AMC 25-13 Reduced take-off thrust, for an aeroplane, is a take-off thrust less than ATM is a flexible way of reducing the takeoff thrust – depending on the situation – and is based on assuming a higher than actual temperature resulting in a lower thrust output of the engines. Assumed Temperature (TASSUMED) varies with actual TOW, engine thrust rating, engine bleed demand, flap setting and different runways/intersections. Reduced thrust based on an TASSUMED is not a limit – pilots may advance the thrust levers to the TO/GA-thrust setting for the actual OAT (eg. in N-1 operations). 3.2.2.1. Performance Margins Using the max allowable TASSUMED, still leaves performance margins, due to true airspeed and thrust effects. True Airspeed Effect TAS is affected by OAT. IAS is based on air pressure difference in the pitot static system. Due to a higher air density at low OAT, a slower airflow is sufficient to generate the pressure difference needed to reach a given IAS, resulting in a lower TAS. The opposite is true for a high OAT. When assuming a higher than actual OAT, the resulting takeoff performance is based on a higher TAS, but the actual TAS will be lower (because the actual OAT is lower). Thrust Effect A high-bypass turbofan engine, as mounted on the B737, produces about 80% of the total thrust by accelerating air mass through the fan. Higher air density, hence higher air mass, results in higher thrust. When assuming a higher than actual OAT, the resulting takeoff performance is based on a lower air density and therefore lower thrust, but the actual thrust will be higher (because of the actual higher air density). A lower TAS combined with a higher thrust will result in: Shorter ground distance Higher climb gradient Margins when using ATM Using the Assumed Temperature Method is always conservative because the actual performance of the airplane is always better than its assumed capabilities even at the maximum allowable assumed temperature. These performance margins exist anytime TASSUMED (if > FRT) exceeds OAT. The greater the difference between OAT and TASSUMED, the greater the performance margin. These performance margins are not available when using the Derate method. To achieve the available performance margins, proper takeoff speeds have to be used; overspeed will reduce those available margins. Using these inherent margins for takeoff weight planning is prohibited. 3.2.2.2. Restrictions The amount of thrust reduction is restricted by the following: Regulations VMCG and VMCA must be calculated at the TO/GA-thrust for the actual OAT. EASA/AMC 25-13The reduced take-off thrust setting enables compliance with the aeropla Reduced thrust takeoffs are not allowed on contaminated runways, but, if suitable data is available, are allowed on wet runways. EASA/AMC 25-13Takeoffs utilising reduced take-off thrust settings are not authorised on Maximum allowable TASSUMED is the lower of the performance-limited temperature, and the temperature which results in 25% thrust reduction. EASA/AMC 25-13The reduced take-off thrust setting is at least 75% of the take-off thrust The use of reduced thrust is also not allowed when certain items cause a significant workload increase. EASA/AMC 25-13Take-offs utilizing reduced take-off thrust settings are not authorised w Regulations do allow application of full thrust whenever desirable. EASA/AMC 25-13When conducting a take-off using reduced take-off thrust, take-off thru EASA/AMC 25-13 Application of reduced take-off thrust in service is always at the discr Performance Limits PLTOW decreases with decreasing takeoff thrust. The amount of thrust reduction will be limited to the situation where the PLTOW equals the Actual TOW. Engine limits Using an TASSUMED less than the FRT will not result in less thrust. TASSUMED < FRT: No thrust reduction The FRT is the minimum assumed temperature which still results in a thrust reduction. Company restrictions Your company might have additional restrictions on the use of reduced thrust. 3.2.2.3. Reduced thrust and speeds Consequences of reduced takeoff thrust for the takeoff speeds are: Higher V1 Reducing the takeoff thrust results in a reduced acceleration capability. In order to preserve the field length requirement a higher V1 shall be used. [PRH A12.2.4.2. Rebalancing] Lower V2 Reducing the takeoff thrust results in less (excess) thrust available to reach standard V2 at the screenheight. In order to preserve the desired field length, obstacle and/or climb requirement a lower V2 shall be used. 3.2.2.4. Reduced thrust and trim Since the trim setting for takeoff is based on full thrust, normally a pitch up trim movement is required after takeoff with reduced thrust. 3.2.3. Combination Derate and Reduced thrust This is a method of thrust reduction which consists of applying the assumed temperature method on a derated thrust level. The derate thrust level is a maximum and may not be exceeded. Maximum allowed thrust reduction is 25% of the derate thrust level. 1. GENERAL CLIMB AND CRUISE 1.1. COST INDEX Cost Index (CI): Parameter which reflects the relationship between time-related costs versus fuel costs. Cost Index = Time-related costs / Fuel costs Used to minimize the Direct Operating Costs (total costs) which are divided into time related costs, fuel costs and fixed costs. Fixed costs are not part of CI calculation. Low CI: low speed, low fuelburn, high triptime. Will be used when time related costs are low or the fuel cost are high. High CI: high speed, high fuelburn, low triptime. Will be used when the time related costs are high or the fuel cost are low. 1.2. ENROUTE CLIMB Enroute climb speed depends on weight and CI. High weight or high CI will result in a higher enroute climb speed. Enroute climb speed depends on weight and CI Climbing with a constant IAS results in an increasing TAS. Climbing with a constant Mach number will result in a decreasing TAS. Around 29.000 ft lies the crossover altitude where the climbspeed changes from IAS to Mach number. IAS / Mach number versus altitude 1.3. CRUISE ALTITUDE Choosing the best altitude will maximize the fuel or cost efficiency and will ensure that adequate speed margins are preserved. Altitude selection depends on: Fuel/cost efficiency Thrust limits Maneuver capability Trip distance Altitude winds 1.3.1. Optimum altitude Optimum Altitude: Altitude which offers the highest fuel mileage (or specific range). Fuel Mileage (Specific Range): The distance the airplane can fly using a given amount of fuel. Maximum fuel mileage means minimum trip fuel. Varies with the airplane's weight. Regarding fuel mileage, a lower weight yields a higher optimum altitude. Altitude which offers the lowest costs is also an optimum altitude and may not be the same as the altitude offering the highest fuel mileage. Optimum altitude which balances the costs and the fuel mileage is determined by the cost index. Cost Index decrease: Optimum Altitude increase Efficiency is maximized when the aircraft stays within a bandwidth (normally +/- 2000 feet, in RVSM-airspace +/- 1000 feet) around the optimum altitude. Step climb to stay close to the optimum altitude 1.3.2. Maximum Altitude The maximum altitude at which the aircraft is able to operate is constrained by available thrust (thrust limited altitude) and maneuver (or buffet) margin (maneuver-margin limited altitude). Thrust limited altitude Due to decreasing air density, available thrust decreases with increasing altitude. The thrust limited altitude is the highest altitude the airplane can maintain at the Maximum Cruise Thrust rating or climb to at the Maximum Climb Thrust rating. Calculation of the thrust limited altitude is based on a residual rate-of-climb of 100 fpm in cruise or 300 fpm in climb. Maneuver margin limited altitude Maneuver margin is the number of g's the airplane could experience before entering buffet. [e.g. 1.2 g-margin means initial buffet would be expected upon reaching a steady 34 degree bank (1/cos34 = 1.2)]. Margin to initial buffet decreases with increasing altitude. Due to a wingload increase (caused by maneuvering or turbulence), a lower buffet margin could result in buffet, or stall. Limited by (EASA) regulations: 1.3g (up to 1.6g is airline option). The standard default FMC buffet margin value is 1.3g. The default value of cruise CG on the FMC-CRZ page shows the minimum forward flight (most unfavorable) CG (~ 5-8% MAC), which may be overwritten. In order to be able to have the correct actual maximum altitude displayed on the FMC-CRZ page, the correct actual cruise CG must be entered in the FMC. A realistic value of cruise CG can be obtained by assessing the CG travel with fuel burn. The FMC does not take stick shaker speeds into account when calculating maximum altitude. 737NG CG travel with fuel burn 1.4. CRUISE SPEED For a given altitude, the fuel efficiency the airplane can achieve in cruise depends on the cruise speed. Very low speeds are relatively inefficient, as are very high speeds. The fuel mileage depends on airplane weight. 1.4.1. Maximum Range Cruise Maximum Range Cruise speed (MRC): The speed at which, for a given weight, the highest possible fuel mileage is achieved. MRC is the speed with Cost Index = 0. MRC decreases with decreasing weight due to fuel burn. To achieve the maximum range possible when flying at a constant altitude, the Mach number needs to be adjusted to correspond to the change in weight. 1.4.2. Long Range Cruise Long Range Cruise speed (LRC) is a speed higher than MRC with only a slight increase in fuel consumption. LRC has a 1% less fuel mileage but is typically 3 to 5% higher than MRC. The 1% loss compared to the maximum fuel mileage is largely compensated by the cruise speed increase. Operating at MRC speed requires constant thrust adjustments due to lack of speed stability. LRC speed offers improved speed stability (less thrust lever activity). As with the MRC, the LRC also decreases with decreasing weight. 1.4.3. Economic Cruise speed (ECON speed) ECON speed: Speed based on the cost index, therefore offering the least costs. Can vary from a low speed of MRC at a cost index of zero to the Cruise Thrust limit speed at a high cost index. [PRH A2-1.1. Cost index] Cost Index decrease: ECON Speed decrease Is also a function of gross weight, altitude and the actual winds, so it will change during the flight as fuel burns, the wind changes or a different altitude is selected. A strong tailwind will result in a reduced ECON speed in order to maximize the advantage gained from the tailwind during cruise. Conversely, a higher ECON speed is calculated in case of a headwind in cruise to minimize the time-related costs associated with the headwind. Tailwind increase: ECON Speed decrease Headwind increase: ECON Speed increase Typical airline cost index values result in a cruise speed between MRC and LRC. 2. ENROUTE PERFORMANCE REQUIREMENTS DRIFTDOWN 2.1. GENERAL Enroute performance requirements address the aircraft capabilities in case of an engine failure in the enroute phase of flight. If an engine fails during flight, the required thrust to maintain the altitude becomes greater than the available MCT of the remaining engine. The aircraft has to descend to a lower altitude where, due to the higher density, the remaining engine can produce more thrust and is able to equal the required thrust to compensate the drag. Lower altitude – higher density – more available thrust 2.2. DRIFTDOWN If after an engine failure the aircraft is unable to maintain sufficient terrain clearance, within the prescribed corridor width along the route, a driftdown procedure should be followed. The driftdown procedure consists of the following steps: Setting of MCT on the remaining engine, Decelerating to the optimum driftdown speed, while maintaining altitude, Descending with this speed until reaching the driftdown ceiling (level-off altitude). The optimum driftdown speed offers the best lift-to-drag ratio and should be used in cases where staying as high as possible for as long as possible is desirable due to terrain or weather concerns. Driftdown Ceiling: The maximum altitude that can be flown at the driftdown speed with one engine inoperative. Using a higher than optimum driftdown speed will result in a slightly steeper descent path and a lower level-off altitude. After driftdown, flying LRC-speed offers the best fuel mileage and range. Higher driftdown speed – lower level-off altitude 2.3. REGULATIONS 2.3.1. Vertical clearance Regulations define a Net and Gross driftdown flightpath. Net Driftdown Flightpath: A theoretical flightpath which must clear all obstacles vertically with at least 2000 feet during descent and with at least 1000 feet after level-off and must maintain level flight at least 1500 feet above the airport of intended landing, meeting weather and landing performance requirements. If weather conditions require its use, the effect of anti-ice systems on the net flight path must be taken into account. The Gross (actual) driftdown flightpath gradient must be 1.1% (for a 2-engine aircraft) more penalizing than the Net driftdown flightpath gradient. Driftdown requirements 2.3.2. Lateral Clearance Regulations require that within 5NM either side of the intended track, all terrain must be considered with regard to obstacles that have to be cleared. EASA’s requirement of 5NM has to be increased to 10NM if certain navigational accuracy requirements are not met. For all routes to be flown a route study is necessary to evaluate whether or not an acceptable escape procedure is possible when a failure occurs at the most critical point along the route. If, on a certain route, the above mentioned requirements cannot be met, the aircraft weight will be restricted for that specific route or a new route must be found. 1. GENERAL LANDING DISTANCE AND SPEED 1.1. LANDING DISTANCE AVAILABLE (LDA) EU-OPS 1.480Landing Distance Available (LDA): The length of the runway which is decl The stopway cannot be used for landing calculation. In cases where there are no obstacles under the landing path the LDA is equal to the runway length (TORA). The LDA may be shortened due to the presence of obstacles under the landing path. If there is an obstacle present in a specified protection area (approach funnel) in front of the runway, a displaced threshold is defined. In such cases the LDA is equal to the length measured from the displaced threshold to the end of the runway. The runway part before the displaced threshold may be used for taxiing, takeoff and landing roll-out. Displaced threshold due to obstacle in approach path 1.2. LANDING SPEED 1.2.1. Reference Speed (VREF) Reference Speed(VREF): The reference landing approach speed for a defined landing configuration. This speed must not be less than VMCL, the minimum landing control speed. VREF ≥ VMCL CS-25.149VMCL, the minimum control speed during approach and landing with all engin VREF must also be at least 23% greater than the reference stall speed in landing configuration (VSR0). VREF ≥ 1.23 VSR0 Because VREF is based on the stall speed, it depends directly on the airplane’s gross weight. The threshold speed is VREF for certification and FAS in the actual operation. 1.2.2. Final Approach Speed (FAS) Final Approach Speed (FAS) is based on VREF. Final Approach Speed(FAS): The airspeed to be maintained down to 50 feet over the threshold. FAS = VREF + correction This correction is normally based on operational factors such as wind, but can additionaly be based on an abnormal (landing) configuration. The wind correction is typically half the steady headwind component (with a minimum of 5 knots) plus the full gust increment. cumulatively limited to 20 knots, or the resulting FAS is limited to 5 knots below the landing flap placard speed. FAS = (VREF + ½ HWC + Gust) (VREF + 5) ≤ FAS ≤ (VREF + 20) ≤ (Flap placard speed – 5 kts) Touchdown will normally occur at a speed between VREF and VREF minus 5 knots. An applicable gust increment needs to be maintained until touchdown. Landing Speeds 2. LANDING PERFORMANCE REQUIREMENTS DISPATCH MAXIMUM ALLOWABLE LANDING WEIGHT 2.1. GENERAL Dispatch (planning) requirements are laid down in the EU-OPS regulations and are designed to make weight calculations in the flight planning stage in such a way that the crew will not have to make critical performance decisions inflight. The planning purpose, regarding landing performance, consists of determining the maximum Landing Weight (LDW) for the destination and alternate aerodromes which still meets the regulatory requirements. With respect to landing performance the requirements consider: landing field length, resulting in a Landing Field Limit Weight (LFLW) [PRH A3-2.2. Landing field requirement] approach and landing climb, resulting in a Landing Climb Limit Weight (LCLW) [PRH A3-2.3. Approach and Landing climb requirement] The most limiting of these requirements defines the Performance Limit LDW (PL-LDW) for dispatch and need to be compared to the Max (Certified) Structural LDW to determine the Maximum Allowable LDW. Besides these requirements, operation can also be restricted by the maximum weight for a quick turnaround concerning brake cooling. The following environmental conditions have to be taken into account: EU-OPS 1.515 (1) The altitude at the aerodrome; (2) Not more than 50% of the headwind Normally, pilots are provided with data which already meet the head/tail wind requirements. B737NG is limited to operations on runways with a slope not exceeding +/- 2%. A known aircraft system failure has also to be taken into account. 2.2. LANDING FIELD REQUIREMENT – LFLW 2.2.1. Dispatch Requirements The dispatch requirements regarding landing field length are laid down in EUOPS 1.515. EU-OPS 1.515 (a) An operator shall ensure that the landing mass of the aeroplane […] for Estimated LDW must permit a landing within 60% of the LDA at the destination and any alternate airport. Herewith, two considerations have to be established in determining the maximum permissible landing mass, of which the most limiting determines the Landing Field Limit Weight: It is assumed that the aircraft will land on the most favorable (normally the longest) runway under no wind conditions. When the Estimated Landing Weight (ELW) exceeds the LFLW determined for the most favorable runway without credit for headwind, dispatch with this higher ELW to an airport with a single runway is allowed, provided that 2 alternate aerodromes are selected which fully comply to the dispatch landing requirements. [EU-OPS 1.515] If being dispatched with this higher ELW, it must be checked inflight that the actual LDW upon arrival does not exceed the LFLW, determined with taking the actual wind into account.[EU-OPS 1.515] If a different runway is more likely to be assigned as landing runway (due to expected wind, noise abatement or ATC), it is assumed that the aircraft will land on this expected arrival runway, where anticipated headwind may be credited but anticipated tailwind must be taken into account (anticipated wind is the wind expected to exist at the time of arrival). [IEM-OPS 1.515] When the Estimated Landing Weight (ELW) exceeds the LFLW determined for the expected arrival runway with credit for headwind, dispatch with this higher ELW is allowed, provided that 1 alternate airport is selected which fully complies to the dispatch landing requirements. [EU-OPS 1.515] How this LFLW requirement is developed and how it is applied on other than dry runways is further explained in the next paragraphs. 2.2.2. Certified Landing Distance Landing field length performance is developed from flight test demonstrated landing distances (performed by test pilots). Flight Test Landing Distance: Demonstrated landing distance on a dry runway, measured from a height of 50 feet above the landing surface using an aggressive touchdown technique, maximum manual wheel braking and speed brakes, but without credit for reverse thrust during the landing ground roll. Flight test landing techniques used by manufacturers are usually not the same as techniques used by flight crews in normal airline operations. The Certified Landing Distance on a dry runway (CLDDRY) is the Flight Test Demonstrated Landing Distance (FTDLD) plus an additional margin of 67 percent. CLDDRY = 1.67 x FTDLD According EU-OPS 1.520 the Certified Landing Distance on a wet runway (CLDWET) is CLDDRY plus an additional margin of 15%, due to reduced braking performance. CLDWET = 1.15 x CLDDRY or 1.92 x FTDLD Certified Landing Distance on a contaminated (slippery) runway (CLDCNTM) is the longest of CLDWET and 115% of the required landing distance in accordance with approved contaminated runway landing distance data [EU-OPS 1.520]. CLDCNTM = CLDWET or 1.15 x LDRCNTM Certified Landing Distances Landing Field Limit Weight (LFLW): The maximum weight for which the Landing Distance Available (LDA) equals the required CLD. For a dry runway this implies that the planned landing distance for the LFLWDRY equals (1 / 1.67 =) 60% of the LDA, leaving a 40% planning margin. For a wet runway this implies that the planned landing distance for the LFLWWET equals (1 / [1.67x1.15] =) 52% of the LDA, leaving a 48% planning margin. LFLW planning margins on LDA 2.2.3. Landing Field Limit Weight – Dry Runway The LFLWDRY is the maximum weight for which the LDA equals CLDDRY and therefore requires, under planning conditions, a landing distance from 50 feet above the threshold equal to only 60% LDA. LFLWDRY requires 60% LDA This weight does not account for runway slope (if less than 2%), non-standard temperature and approach speed additives, but this is protected by the margins used to define the LFLW. 2.2.4. Landing Field Limit Weight – Wet Runway EU-OPS 1.520An operator shall ensure that when the appropriate weather reports or forec EU-OPS 1.515 reflects determination of the landing distance on a dry runway. If, according the weather reports, there is a possibility that at ETA the runway may be wet, the ELW may not exceed LFLWWET. LFLWWET is the maximum weight for which the LDA equals CLDWET and therefore requires, under planning conditions, a landing distance from 50 feet above the threshold equal to only 52% LDA. LFLWWET requires 52% LDA LFLWWET also equals (1/1.15 =) 0.87 LFLWDRY. LFLWWET = 87% LFLWDRY 2.2.5. Landing Field Limit Weight – Contaminated (Slippery) Runway [EU-OPS 1.520] If the planned landing is expected to be made on a contaminated (slippery) runway, the LFLW shall be the most limiting of: LFLWWET, and LFLWCNTM, which is the LFLW based on 115% of the landing distance determined in accordance with approved contaminated runway data. Approved contaminated (slippery) runway landing distance data for the B737NG is available in QRH/PI Normal Configuration Landing Distance. These distances are already factored by 15%.[PRH B2-1.1.2. Contaminated (slippery) runway data] In determining LFLWCNTM with approved contaminated runway data, regulations do not require the 60% planning margin to be taken into account. This margin is implemented in the determination of LFLWWET against which LFLWCNTM has to be checked. 2.3. APPROACH AND LANDING CLIMB REQUIREMENT - LCLW Go-Around Requirement To ensure a minimum climb gradient capability in the certified approach and landing configuration in case a go-around becomes necessary at any point during the landing approach, two separate requirements have to be met. Approach Climb[CS 25.121(d)] For a two engine airplane the minimum required climb gradient in the approach configuration (approach flap setting and gear up) with one engine inoperative and remaining engine at go-around thrust is 2.1%, calculated at a speed not greater than 1.4 VS1G for the selected approach flap setting. Landing Climb[CS 25.119] For a two engine airplane the minimum required climb gradient in the landing configuration (landing flap setting and gear down) with both engines operating, where go-around thrust is available 8 seconds after thrust levers are moved from minimum flight idle to the go-around position, is 3.2%, calculated at a speed not less than 1.13 VSR or VMCL and not greater than VREF for the selected approach flaps. Approach and Landing Climb requirements For a two engine aircraft, the approach climb requirement is normally more limiting than the landing climb requirement. Additional approach climb requirements: For instrument approaches with a missed approach gradient greater than 2.1% the approach climb gradient must be at least equal to or greater than the applicable missed approach gradient. Published approach minima are normally based on a missed approach gradient of 2.5%. [IEM-OPS 1.510] Only for operators subjected to EU-OPS, there is an additional requirement for Cat II/III approaches: EU-OPS 1.510For instrument approaches with decision heights below 200 ft, an operator m Landing Climb Limit Weight (LCLW): The maximum weight which can just achieve the most limiting of the approach and landing climb requirements which can be further restricted by the achievability of the required missed approach gradient. 2.4. QUICK TURNAROUND LIMIT WEIGHT Besides the LFLW and LCLW, operation can also be limited by the maximum weight for a quick turnaround (Quick Turnaround Limit Weight – QTLW), thereby limiting the LDW. Quick Turnaround Limit Weight (QTLW): The maximum landing weight for which there is no minimum ground time required with respect to possible fuse plug melting. This weight does not guarantee sufficient brake energy absorbtion in case of a subsequent aborted takeoff. The QTLW protects the wheel fuse plugs from melting during a subsequent takeoff. CS-AMC 25.735 The temperature sensitive devices (e.g. fuse or fusible plugs) should be s The Quick Turnaround Limit Weight restriction only guarantees that fuse plugs will not melt during the next takeoff and does not provide additional brake energy protection if it becomes necessary to reject the takeoff. 3. LANDING PERFORMANCE REQUIREMENTS – INFLIGHT REQUIRED LANDING DISTANCE AND GO-AROUND GRADIENT Where dispatch landing requirements result in a Max Allowable LDW, based on (restrictive) assumed conditions, the inflight requirement consists of determination of the required landing distance and the achievable go-around gradient based on the actual LDW under actual conditions. Inflight landing field and landing climb requirements consist of what is stated in EU-OPS: EU-OPS 1.400 Before commencing an approach to land, the commander must satisfy hims From this it can be concluded that for the actual LDW under the actual landing circumstances: LDR must not exceed the LDA. Required go-around climb gradient must be achieved. Landing distance data as provided by the manufacturer must be based on worn brakes. CS-25.101 The (…) landing distances (…) must be determined with all the aeroplane whee Regulations do not require margins when determining LDR, but when determining the LDR when the runway is not dry, a margin of 15% is recommended. Normally, pilots are provided with data where this recommendation is implemented.[PRH B2-2. Inflight (operational) data] In case of an autoland, an increased landing distance must be taken into account. CS-AWO 142 [Automatic] Landing distance The landing distance required must be establi CS-AWO 342 [Automatic] Landing distance If there is any feature of the system or the ass Your company may require an additional margin. Additional inflight check: When dispatched to a destination having a single runway and the ELW exceeds the LFLW, which has been determined for the most favorable runway without credit for headwind, an inflight check must determine that the actual LDW does not exceed the LFLW calculated for actual wind. INTRODUCTION PERFORMANCE DATA Performance Data of the 737NG is made ava 1. TL-CHARTS WEIGHTS AND ADJUSTMENTS 1.1. GENERAL A Takeoff Limiting (TL) - chart is: also referred to as Runway -, Airport - or Takeoff Analysis. an efficient and accurate means for determining Max Allowable TOW and assumed temperature for reduced thrust. a printed result of runway-specific takeoff performance information for a specific aircraft configuration, generated using computer software (Boeing AFM-DPI). PLTOW’s (and sometimes together with corresponding takeoff speeds) for a range of temperatures and wind components are presented. Boeing computer software can produce TL-charts in several formats, but, regarding the PLTOW, normally displays: Brake Release Limit Weights (BRLW) as a function of OAT and wind component. The most limiting value of Field Length Limit, Obstacle, Tire Speed and Brake Energy Limit TOW is displayed, normally provided with a Limit Code corresponding to the most limiting takeoff requirement. The wind requirement of 50% HWC / 150% TWC is implemented. Climb Limit Takeoff Weights (CLTOW) as a function of OAT. Certified for no-wind condition so independent of wind component. Constant (or almost constant) below FRT and decreases with increasing OAT (decreasing thrust). It also displays: Airplane configuration (eg. winglet / flap setting), engine rating (eg. 27K), and applicable airport data (eg. field elevation). Engine failure procedure (Emergency Turn), if applicable. Weight adjustment values for non-standard QNH. Runway characteristics and obstacle data. Possible Layout TL-chart 1.2. WEIGHT ADJUSTMENTS Besides the OAT and wind component, weights on a standard TL-chart are based on: what is stated in the header, regarding runway condition and anti-ice and airco/press system setting. standard pressure (1013 hPa / 29.92” Hg). all equipment operating at the start of takeoff. Any deviation from standard pressure, equipment serviceability and what is stated in the TL-chart header (i.e. what TL-data are based on) needs to be corrected for. Both BRLW and CLTOW are influenced by situations affecting the available thrust: Ambient pressure, as a function of the air density. Engine bleed demand is increased by switching Anti Ice and Airco/Press systems ON, thereby decreasing available thrust. can be diminished by using APU as bleed source. Only BRLW (and NOT the CLTOW) is influenced by the runway condition, since this is the limit weight while the aircraft is still in contact with the runway. 1.2.1. Corrections on both BRLW and CLTOW 1.2.1.1. QNH Correction TL-chart weights are based on the standard pressure of 1013 hPa (29.92” Hg). If the actual QNH is not standard, the available thrust is different from what the TL-weights are calculated with. QNH < 1013 hPa (29.92” Hg): BRLW and CLTOW must be decreased. QNH > 1013 hPa (29.92” Hg): BRLW and CLTOW may be increased. The amount of correction (given in kg/hPa) is normally displayed on the TLtable in the same column (or row) from which the BRLW and CLTOW are taken. 1.2.1.2. Anti-Ice Correction If the Wing Anti-Ice (WAI) or Engine Anti-Ice (EAI) system is switched ON, bleed air is taken from the engine, resulting in less available thrust, thereby affecting BRLW and CLTOW. EAI has to be switched ON any time icing conditions exist or are expected during takeoff. ICING CONDITIONS Icing conditions exist when OAT (on the ground) or TAT (inflight) WAI shall be switched ON any time the EAI is switched ON except when the aircraft is, or will be, treated with type II or IV de-icing fluid according an approved ground de-icing program. Fluid-viscosity is affected by the heat of the WAI, decreasing the effectiveness of the de-icing fluid. B737: WAI is automatically switched OFF when advancing the Thrust Levers for takeoff. If TL-weights are based on Anti-Ice OFF, and the use of EAI and/or WAI is anticipated during takeoff up to 1500 feet, BRLW and CLTOW need to be corrected. A WAI penalty might not be applicable because it is not intended to be used immediately after liftoff. Since WAI is primarily a DE-ice system, icing conditions would be severe if WAI is needed during takeoff. When this is anticipated, the takeoff should be delayed since flying into known severe icing is prohibited. 1.2.1.3. Engine Bleed Correction When the engine bleeds are switched ON, bleed air is taken from the engines to supply the airconditioning/pressurization system, resulting in less available thrust. If TL-chart weights are based on Engine Bleeds OFF (indicated as “AIRCOND OFF”), and it is switched ON during takeoff, BRLW and CLTOW need to be corrected. Engine Bleed penalty may be avoided by using the APU as the bleed source. 1.2.1.4. Unserviceable Equipment MEL 73-11 allows dispatch with both Electronic Engine Control (EEC) in the Alternate Mode. With EEC in ALTN mode: TL-chart weights are not valid anymore and need to be adjusted. FCOM/PI offers a simplified and conservative method by reducing the PLTOW. 1.2.2. Additional Corrections on BRLW only 1.2.2.1. Runway Surface Condition If, due to the runway not being dry, acceleration and/or deceleration are affected, the BRLW has to be lower than in the dry runway situation. [PRH A1-2.2.4.2. Rebalancing] A weight correction on BRLW is needed any time the actual runway condition does not match the runway condition the TL-chart is based on. Weight penalties are available in the FCOM, where the dry-weight serves as an input. TL-charts based on a specific runway condition (e.g. wet) may be available. 1.2.2.1.1. Wet runway weight correction A TL-chart based on wet runway performance (WET TL-chart) may be available. The BRLW taken from a WET TL-chart (BRLWWET) already reflects the reduced weight to account for the reduced stopping capability, but still needs to be corrected for non-standard QNH, anti-ice etc. If no WET TL-chart is available, the BRLWWET has to be determined from a standard (DRY) TL-chart by reducing the BRLWDRY with a wet runway weight adjustment. BRLWWET = BRLWDRY + wet runway weight adjustment (negative value) Weight adjustment values from the FCOM/PI SLIPPERY RUNWAY – REPORTED BRAKING ACTION GOOD table may serve as wet runway weight adjustment. This is only valid when no credit for clearway is accounted for in determining BRLWDRY, since this is not allowed on a wet runway. Using FCOM/PI data to determine Wet runway weight adjustment 1.2.2.1.2. Contaminated runway weight correction Determination of the Brake Release Limit Weight on a contaminated runway (BRLWCNTM) is based on application of a weight penalty on BRLWDRY. BRLWCNTM = BRLWDRY + contaminated rwy weight adjustment (negative value) The applicable weight adjustment values depend on the contaminant type, which is either fluid (like standing water, slush or snow) [PRH A1-2.2.5.3.1. Fluid Contaminants] or hard (like compacted snow or ice) [PRH A1-2.2.5.3.2. Hard Contaminants]. Since fluid contaminants affect both acceleration and deceleration, the corresponding weight penalties are higher than those with respect to hard contaminants, which only affect deceleration. Regarding runways contaminated with a fluid type contaminant, weight penalties can be found in FCOM/PI SLUSH/STANDING WATER TAKEOFF – WEIGHT ADJUSTMENT table. Using FCOM/PI data to determine weight adjustment on fluid contaminant covered runway SLUSH/STANDING WATER TAKEOFF table(FCOM/PI) Data assumes: - screen height a Regarding runways contaminated with a hard type contaminant, weight penalties can be found in FCOM/PI SLIPPERY RUNWAY TAKEOFF – WEIGHT ADJUSTMENT table. Using FCOM/PI data to determine weight adjustment on hard contaminant covered runway SLIPPERY RUNWAY TAKEOFF table(FCOM/PI) Data assumes: - screen height above th 1.2.2.2. Unserviceable Equipment TL-chart weights are based on all equipment operating at the start of the takeoff. Unservicability of the following systems affect the BRLW: Antiskid Unserviceability of the Antiskid system is allowed on a dry runway, but prohibite Thrust Reverser Since on a dry runway the ASD is not credited for reverse thrust, there is n 1.3. V1 ADJUSTMENT – Actual TOW V-speeds have to be obtained from the QRH or FMC for the actual TOW. V1 obtained from the FMC or QRH is the Balanced V1 and needs to be adjusted in case: clearway and stopway are not equal. [PRH A1-2.2.4.2. Rebalancing] acceleration or deceleration capability is affected [PRH A1-2.2.4.1.2. Required unbalancing], due to: runway slope headwind or tailwind runway surface condition unserviceable equipment 1.3.1. Clearway and Stopway Correction From the runway information on the bottom of the TL-chart, the clearway can be determined as TODA minus TORA and the stopway as ASDA minus TORA. Clearway = TODA - TORA Stopway = ASDA - TORA Clearway minus Stopway = TODA - ASDA If clearway and stopway are not equal, the presented TL-chart weights are based on this unbalanced situation and therefore FMC/FCOM V1 needs to be adjusted [PRH A1-2.2.4.1.2. Required unbalancing]. Clearway minus Stopway > 0: V1 decrease Clearway minus Stopway < 0: V1 increase The amount of V1-adjustment is a function of the difference between clearway and stopway and can be found in the FCOM/PI CLEARWAY AND STOPWAY V1 ADJUSTMENT table. Using FCOM/PI data to determine V1 adjustment in case clearway and stopway are not equal Since on a wet runway no credit for clearway is allowed, the value of clearway minus stopway is either zero (situation without stopway) or a negative value (situation with stopway). Regulations limit the clearway length which may be taken into account to half the takeoff flare distance [PRH A1-2.2.2.1. Clearway]. These values are displayed in the FCOM/PI MAXIMUM ALLOWABLE CLEARWAY table. Normally, pilots are provided with data which already takes the maximum allowable clearway into account. 1.3.2. Slope and Wind A runway upslope or headwind component affect the acceleration – a higher V1 is needed. Upslope / Headwind: V1 increase A runway downslope or tailwind component affect the deceleration – a lower V1 is needed. Downslope / Tailwind: V1 decrease The value that V1 needs to be corrected for, is available in the FCOM/PI SLOPE AND WIND V1 ADJUSTMENTS table. Normally a single (average) value of runway slope is available where the actual slope may vary along the runway. A non-lineair runway slope may have an adverse effect on aircraft acceleration or deceleration, not reflected in the performance calculations. 1.3.3. Runway surface condition FMC/FCOM V1 are available for a dry and wet runway. Due to the degraded deceleration capability on a wet runway (acceleration is unaffected), V1WET is lower than V1DRY. [PRH A1-2.2.5.2. Wet runway] If the runway is contaminated, the V1CNTM has to be obtained by adjusting V1DRY. V1CNTM = V1DRY + correction The amount of V1 correction depends on the contaminant type, which is either fluid (like standing water, slush or snow) [PRH A1-2.2.5.3.1. Fluid Contaminants] or hard (like compacted snow or ice) [PRH A1-2.2.5.3.2. Hard Contaminants]. On a runway contaminated with a fluid contaminant the aircrafts ability to both accelerate and decelerate is degraded [PRH A1-2.2.5.3.1. Fluid Contaminants]. Since the deceleration is affected more significantly than the acceleration, V1 needs to be lowered. But with increasing contaminant depth, acceleration will become increasingly affected, resulting in a less negative adjustment value on V1DRY. Corresponding adjustments can be found in FCOM/PI SLUSH/STANDING WATER TAKEOFF – V1 ADJUSTMENT table. Using FCOM/PI data to determine V1 adjustment in case of fluid contaminant covered runway On a runway contaminated with a hard contaminant, acceleration is unaffected. Due to degraded tire-to-ground friction, the deceleration capability is degraded and lowering V1 is needed [PRH A1-2.2.5.3.2. Hard Contaminants]. Corresponding adjustments can be found in FCOM/PI SLIPPERY RUNWAY TAKEOFF – V1 ADJUSTMENT table. Using FCOM/PI data to determine V1 adjustment in case of hard contaminant covered runway In case the adjusted V1 becomes lower than VMCG it has to be set equal to VMCG. For a given available runway length (ASDA), there will be a limit weight for which V1 is equal to VMCG without risking a RTO overrun: V1MCG Limit Weight. FCOM/PI provides V1MCG limit weights for both slippery and slush/standing water takeoffs, and it must be checked if this weight is not exceeded [PRH A1-2.2.5.3.4. V1MCG Limit Weight]. 1.3.4. Unserviceable Equipment Unserviceabilty of equipment that affects the aircrafts ability to accelerate or decelarate requires a V1 adjustment [PRH A1-2.2.4.2. Rebalancing]. 1.3.4.1. Deceleration affected Unserviceability of the following systems affect deceleration requiring a lower V1: Antiskid Unserviceability of the antiskid system is allowed on a dry runway, but prohibited 1.3.4.2. Acceleration affected Unservicability of the following system affects acceleration, requiring a higher V1: EEC in ALTN mode With EEC in ALTN mode, acceleration is affected, requiring a higher 2. NO TL-CHART AVAILABLE LIMIT WEIGHTS FROM FCOM/PD TL tables become invalid in case of changes in specified takeoff runway length or changes in obstacle situations. In case no valid or updated TL-chart is available, the limiting Takeoff Weights in accordance with the takeoff performance requirements must be seperately determined. The most limiting TOW determines the PLTOW and must be checked against the structural TOW to find the Max Allowable TOW [Overview Max Allowable TOW]. In the FCOM/PD tables, Boeing provides conservative data to determine the Field length, Climb and Obstacle Limit Takeoff Weights. Tirespeed Limit Weights can also be found in the FCOM/PD together with the Max Brake Energy Speeds. When these data are not provided, the Tirespeed and Brake Energy are not limiting for the range of conditions shown (eg. B737-700 data). 2.1. FIELD LIMIT TAKEOFF WEIGHT The FCOM/PD presents tabular data to determine the Field Limit TOW. Data are available for Flaps 5 covering a range of pressure altitudes for both a dry and wet runway and are valid for engine bleeds ON and anti-ice OFF. Corrections on the available field length with respect to slope and wind are also presented. Regarding the wind correction data, the requirement to account for 50% of the HWC and 150% of the TWC is implemented. When the aircraft cannot be positioned at the threshold, the line-up correction [PRH A1-2.2.3. Lineup corrections] must be applied and correction values can be found in the text-section of the FCOM/PD. The highest presented value (which is the ASDA-correction) must be used. 2.2. CLIMB LIMIT TAKEOFF WEIGHT The Climb Limit TOW can be obtained from the same FCOM/PD table as from which the Field Limit TOW is determined. Data are available for Flaps 5 covering a range of Pressure Altitudes and OAT’s and are valid for engine bleeds ON and anti-ice OFF. Using FCOM/PD data to determine (Dry/Wet) Field and Climb LW Normally a single (average) value of runway slope is available where the actual slope may vary along the runway. A non-lineair runway slope may have an adverse effect on aircraft acceleration or deceleration, not reflected in the performance calculations. 2.3. OBSTACLE LIMIT WEIGHT Obstacle Limit TOW data are presented for flaps 5, engine bleeds ON and antiice OFF. Data is also available to make adjustments for OAT, PA and wind. In order to use this table, obstacle data, regarding height and distance from the brake release point, must be available. Obstacle data information may be given with reference to end of TORA. When applying line-up corrections, the obstacle distance from brake release must be reduced by the ASDA adjustment. Obstacle height must be calculated from lowest point of the runway to conservatively account for runway slope. Using FCOM/PD data to determine Obstacle LW 2.4. TIRE SPEED LIMIT WEIGHT These data are only provided if it might restrict the TOW for the conditions shown. The Tire Speed Limit Weight is shown as a function of OAT and PA, and is valid for a flaps 5 takeoff under no wind conditions. Wind correction values are provided at the bottom of the table. Data are based on the certified tire speed limit of 225 mph (195 kts). Using FCOM/PD data to determine Tire Speed LW 2.5. BRAKE ENERGY LIMIT FCOM/PD provides data to determine the Maximum Brake Energy speed as a function of OAT, PA and Weight, only if it might restrict the takeoff for the conditions shown. These data are valid for a takeoff in zero wind on a level runway, therefore need to be adjusted for wind and/or runway slope. Correction values are presented at the bottom of the table: Uphill slope or headwind help the stopping capability, allowing a higher VMBE. Downhill slope or tailwind hurt the stopping capability, requiring a lower VMBE. The determined Maximum Brake Energy Speed (VMBE) is the upper-limit for V1. Using FCOM/PD data to determine VMBE 1. DISPATCH DATA CERTIFIED DATA TO DETERMINE MAX ALLOWABLE LANDING WEIGHT The Maximum Allowable LDW is determined from the most limiting of the Sructural LDW and the Performance Limit LDW, which in turn is the lowest of the Landing Field Limit Weight and Landing Climb Limit Weight. Regulations also require a LDW check to assure the aircraft is able to achieve the minimum required go-around climb gradient. Besides regulatory restrictions, the Maximum Allowable LDW can also be limited by operational restrictions regarding a quick turnaround. 1.1. LANDING FIELD LIMIT WEIGHT 1.1.1. Dry and Wet Runway FCOM/PD provides data to determine the Landing Field Limit Weight for both dry and wet runways, either in separate or combined tables. These data already meet the following requirements: 60% of the available landing distance has been taken into account. 50% of the HWC and 150% of the TWC is considered. As a dispatch requirement [PRH A3-2.2. Landing field requirement], LFLW is the lowest of the LFLW determined for: the most favorable runway without wind, and the expected landing runway with wind. Presented data are valid for flaps 40, and are based on antiskid operative and automatic speedbrakes, representing the best achievable landing perfomance regarding required field length. In case the landing will be performed with manual selection of the speedbrakes (when the auto speedbrake system is inop), a weight penalty is provided at the bottom of the table. Separate tables are available in case both the antiskid and auto speedbrake systems are inoperative. Using FCOM/PD data to determine LFLWDRY or LFLWWET 1.1.2. Contaminated (Slippery) Runway Landing Field Limit Weight for a planned landing on a contaminated (slippery) runway is the lesser of LFLWWET and the LFLW based on the required landing distance according to approved contaminated runway data (LFLWCNTM). [PRH A3-2.2.5. LFLW contaminated (slippery) rwy] Approved contaminated runway data can be found as advisory information in the QRH/PI Landing Distance tables with reported braking action. Normally this table has to be applied when determining the required landing distance with the actual LDW inflight, but can, during dispatch, also be used in reverse to determine the LFLWCNTM based on the LDA. Method to obtain the LFLWCNTM from QRH/PI Landing Distance data: Obtain Reference Weight from the 1st column (REF DIST) of this table. Determine LDR of the Reference Weight (LDRREF) by adjusting REF DIST as applicable for ALT, WIND, SLOPE, VREF and TEMP. Use weight adjustment data from 2nd column (WT ADJ) to convert the difference between LDRREF and LDA into a weight adjustment. If LDRREF < LDA add this weight adjustment to the Reference Weight. If LDRREF > LDA substract this weight adjustment from the Reference Weight. When using approved contaminated runway data, regulations do require an additional planning margin of 15% to be taken into account. In the Normal Configuration Landing Distance data for braking action Good, Medium and Poor this margin of 15% is already implemented (factored data). Using QRH/PI data in reverse to determine LFLWCNTM 1.2. LANDING CLIMB LIMIT WEIGHT FCOM/PD provides data to determine the Landing Climb Limit Weight. Per OAT and PA only the most limiting (lowest) value of Approach Climb and Landing Climb Limit Weight is given, therefore this table is valid for approach with flaps 15 and landing with flaps 40. Presented data are based on engine bleed for packs ON and anti-ice OFF, therefore a weight correction is needed in case the configuration is different. Besides weight correction values for anti-ice and packs, at the bottom of the table a correction is also available to account for possible ice built-up on unheated surfaces (eg. outboard LE devices). Using FCOM/PD data to determine LCLW 1.3. GO-AROUND CLIMB GRADIENT FCOM/PD provides data to determine if an aircraft with the planned (or inflight the actual) LDW will be able to achieve the required go-around climb gradient. These data assume a go-around in the worst case configuration: one engine inoperative with flaps still at 15 (e.g. as a result of an engine failure in a dual engine go-around). This table can also be used in reverse by using the required missed approach climb gradient as input to determine the LCLW which is able to achieve this. Using FCOM/PD data to determine N-1 Go-Around Gradient 1.4. QUICK TURNAROUND LIMIT WEIGHT The Quick Turnaround Limit Weight table in the FCOM/PD shows the maximum landing weight for which there is no mandatory minimum ground time for brake cooling prior to the next departure, given for only 1 flap setting (flaps 40). Presented data is valid for a level runway in no wind, and corrections are available to account for up- or downslope and head- or tailwind. If the Actual Landing Weight exceeds the Quick Turnaround Limit Weight from the table, a mandatory minimum ground time (B737: 67 minutes) must be observed to protect against melting of the wheel fuse plug and loss of tire pressure during the next takeoff. As a certification requirement, Quick Turnaround Limit Weight is conservatively based on maximum manual wheel braking with no credit for reverse thrust. The Quick Turnaround Limit Weight restriction only guarantees that fuse plugs will not melt during the next takeoff and does not provide additional brake energy protection if it becomes necessary to reject the takeoff. Using FCOM/PD data to determine Quick Turnaround Limit Weight 2. INFLIGHT (OPERATIONAL) DATA ADVISORY LANDING DISTANCE AND BRAKE COOLING INFORMATION QRH/PI presents advisory information to determine: required landing distance in both normal and non-normal situations recommended brake cooling schedule. Due to the high cost of certifying the advisory information, this advisory information is accepted performance in EASA certification. Therefore EASA operators must use this Advisory Information as mandatory performance. 2.1. LANDING DISTANCE REQUIRED To check if the available landing distance is sufficient for the landing distance required by the actual landing weight under the actual conditions, landing distance data from the QRH/PI have to be applied. Following data is available to determine required landing distance: Normal Configuration Landing Distance Non-normal Configuration Landing Distance The QRH/PI Landing Distance data assume the following: QRH/PI Landing distance data assumptions 2.1.1. Normal Configuration Landing Distance Data available for both certified landing flap settings: 30 & 40. Regarding runway condition, data is provided for a dry runway and for runways with reported braking action GOOD, MEDIUM and POOR. Distances for a dry runway are actual (unfactored) distances, and distances for reported braking actions GOOD, MEDIUM and POOR are factored with 15%. Distance from 50 feet over the threshold to the touchdown point are included, where touchdown is assumed to take place 1000ft (305m) beyond the threshold with a touchdown speed of approximately 98% of the threshold speed. Data is presented as a function of the braking configuration: MAX MANUAL and Autobrake settings 1, 2, 3 and MAX. AUTOBRAKE SETTING SCHEDULED DECELERATION RATE 1 4 ft/sec² 2 5 ft/sec² 3 7 ft/sec² MAX 14 ft/sec² (>80kts) 12 ft/sec² (<80kts) Note: The limit value to achieve the MAX rate is less than full hydraulic system pressure. Manually applying maximum pedal pressure to achieve maximum hydraulic pressure to the brakes will result in a higher deceleration rate and a shorter stopping distance than MAX. As runway friction deteriorates, it is less likely that the airplane will achieve the scheduled autobrake deceleration rates in which case the actual runway stopping distance will be determined by the runway friction capability.[PRH C2-2.3.2. Reverse vs. brakes] Max manual braking achieves the best performance since it combines maximum reverse thrust with maximum footbrake, where the autobrake modulates the wheel brakes as a function of the amount of reverse thrust to keep the scheduled deceleration rate. Max manual braking data assume the use of auto speedbrake. Max manual braking in combination with manual speedbrakes requires a distance correction (penalty). Autobrake data is valid for both manual and auto speedbrake. Reference distance is valid for a reference weight at SL, standard day with no slope or wind and 2 engine detent (no.2) reverse thrust (initiated within 2 seconds after touchdown and 1 second after brake application). The following adjustments have to be made in cases where the actual situation differs from the assumed conditions: WEIGHT – a weight other than the reference weight has to be corrected for. ALTITUDE – correction if airports PA is above SL. WIND – head wind (tailwind) results in decreased (increased) LDR. SLOPE – uphill (downhill) slope results in decreased (increased) LDR. TEMPERATURE – deviations from ISA (at actual PA) requires correction. VREF – distances assume VREF (for the given flap setting) over the threshold. REVERSE THRUST – correction required if one or both T/Rs are not being used. TOUCHDOWN POINT – The 1000ft touchdown point is provided as a reference and needs to be adjusted as required. The aiming point marking on the runway is not always positioned at 1000 feet (305 meters) from the threshold, so when aiming for these markings, the actual touchdown point might be more than 1000 feet (305 meters) from the threshold, thereby increasing the actual landing distance. When landing at the end of the aiming point marking, the actual landing distance might be up to 500 feet (150 meters) longer than the operational landing data assume.[PRH C2-2.2.2. Aiming point marking] 2.1.2. Non-Normal Configuration Landing Distance Distances are published for a dry runway and for runways with reported braking action GOOD, MEDIUM and POOR. Distances are all actual (unfactored) distances and assume MAX MANUAL braking. Data is presented as a function of the (non-normal) configuration. Reference distance assumes a level runway at SL, standard day with no wind and correction values are presented if the actual situation is different. Regarding VREF adjustment: it is assumed that the reference speed required by the (non-normal) configuration (eg. an all flaps up landing requires a reference speed of VREF,40 + 55 kts) is flown over the threshold. Using QRH/PI data to determine LDR 2.2. RECOMMENDED BRAKE COOLING SCHEDULE Recommended Brake Cooling Schedule provides brake energy protection if it becomes necessary to reject the takeoff. Recommended Brake Cooling Schedule provides the only means of evaluating brake cooling requirements following repeated landings at short time intervals or a rejected takeoff. Data is given as a function of: Weight OAT / PA Brakes on speed Reverse thrust use (both or none) Braking configuration (MAX MANUAL and Autobrake settings 1, 2, 3 and MAX) Adjustment is available for additional taxi distance. Interpolation is made a lot easier when groundspeed is used for brakes on speed, in which case the wind may be ignored and the table may be entered with SL and 15°C (59°F). Using QRH/PI data to determine recommended brake cooling time 1. PERFORMANCE RULE DETERMINATION WHICH DATA TO APPLY In order to find out which performance rules apply to the actual takeoff situation: determine the runway conditions using the Runway State Message in the METAR or SNOWTAM in the NOTAMS, whichever is available, and use the outcome to enter the table below, from left to right. This will lead you to the chapter which describes the applicable performance rules. RUNWAY COVERAGE CONTAMINANT WATER EQU [not relevant] None [not relevant] >Any WET Damp <= 25% > 25% Water, Slush or (Dry/Wet) Snow Any CONTAMINATED-HARD >= 3mm (2)(3) and <= 13mm [not relevant] > 13mm (0.5") NOT RECOMMENDED(4) Comp.Snow / Ice [not relevant] < 3mm (0.125 CONTAMINA As a guideline, the Water Equivelent Depth (WED) can be determined from the table below: MEASURED CONTAMINANT DEPTH WATER EQUIVALENT DEPTH Standing water / Slush / Wet snow Dry (Loose) Snow 3mm (0.125") 12mm (0.5") 6mm (0.25") 24mm (1.0") 9mm (0.375") 36mm (1.5") 13mm (0.5") 50mm (2.0") Although according the EU-OPS definition [PRH A1-2.2.5.3. Contaminated runway] a runway (> 25%) covered with a fluid contaminant of exactly 3mm (0.125”) deep is not considered contaminated, it is recommended to classify it as such, since Boeing provides slush/standing water data for depths including 3mm (0.125”). Takeoff in slush depth > 6mm (0.25”) is not recommended at altitudes greater than 8000 feet. Takeoff in slush depth > 13mm (0.5”) is not recommended due to possible airplane damage (also no data available). SNOWTAM (NOTAM) SNOWTAM: A specialized NOTAM notifying the presence of haz RUNWAY STATE MESSAGE (METAR) Runway State Message: Information on runway 2. DRY RUNWAY EU-OPS 1.480A dry runway is one which is neither wet nor contaminated, and includes th EU-OPS 1.475For performance purposes, a damp runway, other than a grass runway, may EU-OPS 1.480A runway is considered damp when the surface is not dry, but when the mo A damp or a wet grooved/PFC runway may not yield the same level of performance as on a dry runway. 2.1. MAXIMUM ALLOWABLE TOW Use OAT and Wind component to find BRLW and CLTOW on the TL chart of the intended takeoff runway/intersection. Apply (substract) weight corrections – AI / Eng Bleed / QNH (if < 1013, else add) – as applicable to find BRLWDRY and (corrected) CLTOW. [PRH B1-1.2. Weight adjustments] Use most limiting as PLTOW and check this against (Certified) Structural TOW. Use the lowest as Max Allowable TOW. 2.2. ASSUMED TEMPERATURE REDUCED THRUST Use Actual TOW and apply (add) weight corrections – AI / Eng Bleed / QNH (if < 1013, else substract – take highest value corresponding to BRLW and CLW) – as applicable, to find Actual Performance TOW. Use TL chart of intended takeoff runway/intersection to find the highest OAT for which both the associated BRLW and CLTOW exceeds the Actual Performance TOW, where a TWC must be taken into account, and a HWC may be taken into account. Use this OAT as Assumed Temperature to enter in the FMC. An Assumed Temperature less than the engine’s Flat Rated Temperature [ISA + 15°C (27°F)](1)will not result in a thrust reduction and will show an ‘INVALID ENTRY’ alert in the scratchpad of the CDU. (1)The FRT is given as Minimum Assumed Temp in FCOM/PI ASSUMED TEMPERATURE REDUCED THRUST. 2.3. V SPEEDS 2.3.1. Using FCOM 2.3.2. Using FMC With actual ZFW and PLANNED TOF entered on PERF REF-page of the FMC, TAKEOFF REF-page 1/2 shows correct VR and V2 speeds. With FMC/TAKEOFF REF-page 2/2 filled out correctly with actual wind and runway slope, TAKEOFF REF-page 1/2 shows balanced V1 corrected for VMCG. The FMC computed V1 may be lower than the value of VMCG from FCOM/PI. This is because the FMC V1 is based on calculation of VMCG with the actual TOW, where the FCOM/PI value is based on a (conservative) low TOW (requiring a high VMCG). No VMCG correction is needed for the FMC computed V1. Normally a single value of (average) runway slope is available where the actual slope may vary along the runway. A non-lineair runway slope may have an adverse effect on aircraft acceleration or deceleration, not reflected in the performance calculations. If TL chart weights are based on unequal TODA and ASDA (i.e. clearway ≠ stopway), displayed (balanced) V1 on TAKEOFF REF-page 1/2 needs to be adjusted as a function of CLEARWAY MINUS STOPWAY [PRH A1-2.2.4.1.2. Required unbalancing], using CLEARWAY AND STOPWAY V1 ADJUSTMENTS table in the FCOM/PI. If V1 is manually lowered it must be checked against VMCG from FCOM/PI V1(MCG) table. Use the higher as V1. 3. WET RUNWAY EU-OPS 1.480 A runway is considered wet, when the runway surface is covered with wate 3.1. USING WET TL CHART 3.1.1. Maximum Allowable TOW Use OAT and Wind component to find BRLW and CLTOW on the (WET) TL chart of the intended takeoff runway/intersection. Apply (substract) weight corrections – AI / Eng Bleed / QNH (if < 1013, else add) – as applicable to find BRLWWET and (corrected) CLTOW. Use most limiting (lowest) of BRLWWET and (corrected) CLTOW as and check this against (Certified) Structural TOW. Use the lowest as Maximum Allowable TOW. 3.1.2. Assumed Temperature Reduced Thrust Use Actual TOW and apply (add) weight corrections – AI / Eng Bleed / QNH (if < 1013, else substract – take highest value corresponding to BRLW and CLW) – as applicable, to find Actual Performance TOW. Use (WET) TL chart of intended takeoff runway/intersection to find the highest OAT for which both the associated BRLW and CLTOW exceeds the Actual Performance TOW, where an existing TWC must and an existing HWC may be taken into account. Use this OAT as Assumed Temperature to enter in the FMC. An Assumed Temperature less than the engine’s Flat Rated Temperature [ISA + 15°C (27°F)](1)will not result in a thrust reduction and will show an ‘INVALID ENTRY’ alert in the scratchpad of the CDU. (1)The FRT is given as Minimum Assumed Temp in FCOM/PI ASSUMED TEMPERATURE REDUCED THRUST. 3.2. USING DRY TL CHART 3.2.1. Maximum Allowable TOW Use OAT and Wind component to find BRLW and CLTOW on the normal (DRY) TL chart of the intended takeoff runway/intersection. Apply (substract) weight corrections – AI / Eng Bleed / QNH (if < 1013, else add) – as applicable to find BRLWDRY and (corrected) CLTOW. Use BRLWDRY (which can be taken for DRY/FIELD OBSTACLE LIMIT WEIGHT) as input for FCOM/PI SLIPPERY RUNWAY TAKEOFF – WEIGHT ADJUSTMENT – REPORTED BRAKING ACTION GOOD table, with the applicable PA, to find the Weight Adjustment value the BRLWDRY needs to be corrected with to find BRLWWET. This is only valid when no credit for clearway is taken into account in determining BRLWDRY, since this is not allowed on a wet runway. Determine V1(MCG) Limit Weight from FCOM/PI SLIPPERY RUNWAY TAKEOFF – V1(MCG) LIMIT WEIGHT – REPORTED BRAKING ACTION GOOD table, using ASDA and PA as input. Use the most limiting (lowest) of (corrected) CLTOW, BRLWWET and V1(MCG)LW as the PLTOW and check this against the (Certified) Structural TOW to find the Maximum Allowable TOW. 3.2.2. Assumed Temperature Reduced Thrust Use Actual TOW and apply (add) weight corrections – AI / Eng Bleed / QNH (if < 1013) – as applicable, to find Actual Performance CLIMB TOW. Use Actual TOW and apply (add) weight corrections (as applicable) for AI, Eng Bleed, QNH (if < 1013, else substract) and Wet Runway Weight Penalty, to find Actual Performance BRAKE RELEASE TOW, where the Wet Runway Weight Penalty is the highest value from the FCOM/PI SLIPPERY RUNWAY TAKEOFF – WEIGHT ADJUSTMENT – REPORTED BRAKING ACTION GOOD table for the actual PA. Use TL chart of intended takeoff runway/intersection to find the highest OAT for which the associated CLTOW exceeds the Actual Performance CLIMB TOW and the associated BRLW exceeds the Actual Performance BRAKE RELEASE TOW, where an existing TWC shall be, and an existing HWC may be taken into account. Use this OAT as Assumed Temperature to enter in the FMC. An Assumed Temperature less than the engine’s Flat Rated Temperature [ISA + 15°C (27°F)](1)will not result in a thrust reduction and will show an ‘INVALID ENTRY’ alert in the scratchpad of the CDU. (1)The FRT is given as Minimum Assumed Temp in FCOM/PI ASSUMED TEMPERATURE REDUCED THRUST. 3.3. V SPEEDS 3.3.1. Using FCOM 3.3.2. Using FMC With actual ZFW and PLANNED TOF entered on PERF REF-page of the FMC, TAKEOFF REF-page 1/2 shows correct VR and V2 speeds. If FMC/TAKEOFF REF-page 2/2 is filled out correctly with actual wind and runway slope, and RWY COND “WET” is highlighted, TAKEOFF REF-page 1/2 shows balanced V1WET corrected for VMCG. The FMC computed V1 may be lower than the value of VMCG from FCOM/PI. This is because the FMC V1 is based on calculation of VMCG with the actual TOW, where the FCOM/PI value is based on a (conservative) low TOW (requiring a high VMCG). No VMCG correction is needed for the FMC computed V1. Normally a single value of (average) runway slope is available where the actual slope may vary along the runway. A non-lineair runway slope may have an adverse effect on aircraft acceleration or deceleration, not reflected in the performance calculations. If TL chart weights are based on a stopway (regulations do not allow a clearway to be taken into account on a wet runway), displayed (balanced) V1WET on FMC/TAKEOFF REF-page 1/2 needs to be adjusted [PRH A1-2.2.4.1.2. Required unbalancing] as a function of CLEARWAY MINUS STOPWAY, using CLEARWAY AND STOPWAY V1 ADJUSTMENTS table in the FCOM/PI (This can only result in a higher V1, since only stopway may be taken into account). FMC speeds can be verified with the tables in the FCOM/PI. On TAKEOFF REF page 2/2 of the FMC also RWY COND “WET SK-R” can be selected, accessing takeoff performance on wet-skid resistant surfaces such as grooved runways and porous friction course (PFC) runways. These data reflect 70% of dry runway performance. These WET SK-R data may only be used if the runway is constructed and maintained to meet the Friction Level Classification for Runway Pavement Surface. Operational approval of the wet skid resistant data must be obtained from the appropriate regulatory authority. 4. CONTAMINATED RUNWAY FLUID OR HARD CONTAMINANT 4.1. GENERAL EU-OPS 1.480 A runway is considered to be contaminated, when more than 25% of the ru EASA/AMC 25-13 […] if the section of the runway surface that is covered with standing w A contaminated runway can either be covered with a FLUID contaminant (like standing water, slush or snow) [PRH A1-2.2.5.3.1. Fluid Contaminants] or with a HARD contaminant (like compacted snow or ice) [PRH A1-2.2.5.3.2. Hard Contaminants]. HARD Contaminant Corresponding contaminant Wet, ice, compacted snow Acceleration / Deceleration Affect deceleration only, acceleration unaffected Cause Reduced tire-to-ground friction (No additional drag fo Result Longer stopping distance only Assumed Temperature Reduced Thrust is not allowed on contaminated runways. If TOW on contaminated runway becomes VMCG limited, the use of Derate (not Reduced) thrust might increase V1MCG Limit Weight, due to lower VMCG.[PRH A1-3.2.1. Derated takeoff thrust] Regulations do not restrict the use of a clearway on contaminated runways. [PRH A1-2.2.5.3.5. Additional considerations - 2nd dot] IEM OPS 1.490 Operation on runways contaminated with water, slush, snow or ice implie 4.1. CONTAMINATED RUNWAY – FLUID CONTAMINANT [Slush/Standing Water Takeoff] 4.1.1. Maximum Allowable TOW Use OAT and Wind component to find BRLW and CLTOW on the (DRY) TL chart of the intended takeoff runway/intersection. Apply (substract) weight corrections – AI / Eng Bleed / QNH (if < 1013, else add) – as applicable to find BRLWDRY and (corrected) CLTOW. Use BRLWDRY (which can be taken for DRY/FIELD OBSTACLE LIMIT WEIGHT) as input for FCOM/PI SLUSH/STANDING WATER TAKEOFF – WEIGHT ADJUSTMENT table, with the deposit’s Water Equivalent Depth and the applicable PA, to find the Weight Adjustment value the BRLWDRY needs to be corrected with to find BRLWCNTM. Determine V1(MCG) Limit Weight from FCOM/PI SLUSH/STANDING WATER TAKEOFF – V1(MCG) LIMIT WEIGHT table, using the deposit’s Water Equivalent Depth, ASDA and PA as input. Use the most limiting (lowest) of (corrected) CLTOW, BRLWCNTM and V1(MCG)LW as the PLTOW. Check PLTOW against the (Certified) Structural TOW to find the Maximum Allowable TOW. 4.1.2. V Speeds 4.1.2.1. Using FCOM 4.1.2.2. Using FMC With actual ZFW and PLANNED TOF entered on PERF REF-page of the FMC, TAKEOFF REF-page 1/2 shows correct VR and V2 speeds. With FMC/TAKEOFF REF-page 2/2 filled out correctly with actual wind and runway slope, TAKEOFF REF-page 1/2 shows balanced V1DRY. Normally a single value of (average) runway slope is available where the actual slope may vary along the runway. A non-lineair runway slope may have an adverse effect on aircraft acceleration or deceleration, not reflected in the performance calculations. Correct the FMC/balanced V1DRY for unequal clearway/stopway, as applicable. [PRH A1-2.2.4.1.2. Required unbalancing] FMC does not provide the correct V1 for a contaminated runway, therefore FCOM/PI SLUSH/STANDING WATER TAKEOFF – V1 ADJUSTMENT table needs to be applied to adjust the FMC/balanced V1DRY (corrected for unequal clearway-stopway, if applicable), in order to account for the reduced acceleration and deceleration capability due to the (fluid) contaminant on the runway. [PRH A1-2.2.4.2. Rebalancing] Check V1 against VMCG from FCOM/PI SLUSH/STANDING WATER TAKEOFF – V1(MCG) table and use the higher as V1. Note (from table data) that with increasing contaminant’s depth, V1 adjustment becomes less negative due to decreasing acceleration capability.[PRH A12.2.4.2. Rebalancing] 4.2. CONTAMINATED RUNWAY – HARD CONTAMINANT [Slippery Runway Takeoff] 4.2.1. Maximum Allowable TOW Use OAT and Wind component to find BRLW and CLTOW on the (DRY) TL chart of the intended takeoff runway/intersection. Apply (substract) weight corrections – AI / Eng Bleed / QNH (if < 1013, else add) – as applicable to find BRLWDRY and (corrected) CLTOW. Use BRLWDRY (which can be taken for DRY/FIELD OBSTACLE LIMIT WEIGHT) as input for FCOM/PI SLIPPERY RUNWAY TAKEOFF – WEIGHT ADJUSTMENT with the Reported Braking Action and applicable PA, to find the Weight Adjustment value the BRLWDRY needs to be corrected by to find BRLWCNTM . Determine V1(MCG) Limit Weight from FCOM/PI SLIPPERY RUNWAY TAKEOFF – V1(MCG) LIMIT WEIGHT table, using the Reported Braking Action, ASDA and PA as input. Use the most limiting (lowest) of (corrected) CLTOW, BRLWCNTM and V1(MCG)LW as the PLTOW. Check PLTOW against the (Certified) Structural TOW to find the Maximum Allowable TOW. 4.2.2. V Speeds 4.2.2.1. Using FCOM 4.2.2.2. Using FMC With actual ZFW and PLANNED TOF entered on PERF REF-page of the FMC, TAKEOFF REF-page 1/2 shows correct VR and V2 speeds. With FMC/TAKEOFF REF-page 2/2 filled out correctly with actual wind and runway slope, TAKEOFF REF-page 1/2 shows balanced V1DRY. Normally a single value of (average) runway slope is available where the actual slope may vary along the runway. A non-lineair runway slope may have an adverse effect on aircraft acceleration or deceleration, not reflected in the performance calculations. Correct the FMC/balanced V1DRY for unequal clearway/stopway, as applicable. [PRH A1-2.2.4.1.2. Required unbalancing] FMC does not provide the correct V1 for a contaminated runway, therefore FCOM/PI SLIPPERY RUNWAY TAKEOFF – V1 ADJUSTMENT table needs to be applied to adjust the FMC/balanced V1DRY (corrected for unequal clearway-stopway, if applicable), in order to account for the reduced deceleration capability due to the (hard) contaminant on the runway. [PRH A1-2.2.4.2. Rebalancing] Check V1 against VMCG from FCOM/PI SLIPPERY RUNWAY TAKEOFF – V1(MCG) table and use the higher as V1. 'SLIPPERY WHEN WET’ (NOTAM) Runway friction can be divided into 3 levels: 1. Des 5. INOPERATIVE EQUIPMENT ACCELERATION AND/OR DECELERATION AFFECTED The normal airplane performance is based on the assumption that all equipment is operating normally, so in case of inoperative or deactivated equipment, performance adjustments have to be applied. 5.1. ANTISKID INOP Only allowed on a dry runway. Reduced thrust takeoff not allowed. Improved climb is not allowed. [PRH A1-2.3.2. Improved Climb] Because deceleration is affected, a weight and V1 speed adjustment is required for which a simplified method can be found in the FCOM PI/TEXT section. The FCOM method can be overruled by a method mentioned in MEL 32-02 [Antiskid System] or your company’s substitute. Apply weight adjustment on BRLWDRY.[PRH C1-2.1. MTOW Dry runway] Apply V1 speed adjustment on V1. Determine V1 for BRLWDRY,ANTISKID INOP (corrected for OAT, PA, runway slope, wind and clearway/stopway), compare this to V1 determined for the actual TOW [PRH C1-2.3. V-speeds Dry runway] and use the lower as V1. If the resulting V1 is less than VMCG, V1 must be set equal VMCG. Takeoff is permitted with V1=VMCG, provided the ASDA is at least the value mentioned in FCOM PI/TEXT. Special “Antiskid Inoperative” TL-tables can be generated which are more accurate and might therefore be less restrictive. 5.2. THRUST REVERSER INOP Since no credit is taken into account for the use of reverse thrust on a dry runway, an inoperative thrust reverser has no effect on dry runway takeoff performance calculations. On a non-dry runway, because deceleration is affected, a weight and V1 adjustment is required if 1 or both T/R's are inoperative or deactivated (not necessarily accompanied by illumination of the REVERSER light). Your company might prohibit the use of reduced takeoff thrust. 5.2.1. Wet Runway The way the weight and V1 adjustments have to be applied depends on how BRLWWET is determined. Apply weight adjustment on BRLWWET. If BRLWWET is determined from a WET TL-chart[PRH C1-3.1. Using wet-TL chart], this weight needs to be adjusted (lowered) according to a simplified method which can be found in the FCOM PI/TEXT section. This FCOM method can be overruled by a method mentioned in MEL 78-01 [Thrust Reverser Systems], or your company’s substitute. If BRLWWET is determined from a DRY TL-chart (no WET TL-chart available), use the method as described in chapter C1-3.2., but apply FCOM/PI SLIPPERY RUNWAY TAKEOFF – REPORTED BRAKING ACTION GOOD – NO REVERSE THRUST tables. Determine V1 according the flowchart below, or apply V1 adjustment according FCOM/PI SLIPPERY RUNWAY TAKEOFF – V1 ADJUSTMENT – REPORTED BRAKING ACTION GOOD –NO REVERSE THRUST to the normal Dry V1, compare the result to VMCG and take the higher as V1. If the resulting V1 is less than VMCG, V1 must be set equal VMCG. Takeoff is permitted with V1=VMCG, provided the ASDA is at least the value mentioned in FCOM PI/TEXT. 5.2.2. Contaminated Runway Determine BRLWCNTM and V1 as in chapter C1-4.1. or chapter C14.2. (depending on the contaminant type), but use the NO REVERSE THRUST tables. 5.3. EEC ALTN MODE According to the MEL 73-11 [Electronic Engine Control] Dispatch is allowed with both EECs in ALTN mode, provided performance adjustments are applied. The EEC aims for constant N1 during the takeoff run while airspeed increases. With EEC in ALTN mode, acceleration is affected due to variations in N1, requiring higher takeoff speeds and a lower PLTOW. Variations in N1 due to EEC ALTN mode Adjustments on PLTOW (divided per performance limit situation Field / Obstacle / Tirespeed / Climb), V1, VR and V2 (corrected for OAT / PA / slope / wind / runway condition / clear- and stopway) can be found in FCOM/PI Section ALTERNATE MODE EEC. Depending on engine thrust rating, speed or other performance adjustments might not be necessary. Reduced thrust takeoff is not allowed. 5.4. AUTO SPEEDBRAKE INOP In case of an RTO with the auto speedbrake inoperative, the speedbrake can still be pulled manually (pulling the speedbrake is part of the RTO-drill), therefore no penalty applies to the takeoff situation. (Auto speedbrake system inop for landing - Dispatch / Inflight) 1. DISPATCH CALCULATIONS DETERMINATION MAX ALLOWABLE LANDING WEIGHT Landing dispatch calculations must be made for destination and alternate airport, which are either planned during dispatch or re-planned inflight. The Maximum Allowable LDW is determined from the most limiting of the (Certified) Sructural LDW and the Performance Limit LDW, which in turn is the lowest of the Landing Field Limit Weight and Landing Climb Limit Weight. (1)Determine LFLW for the most limiting of: (A) the most favorable (normally the long LCLW meets certain minimum climb gradients [PRH A3-2.3. Approach and Landing climb requirement], but needs to be restricted more in cases where the minimum required go-around climb gradient is higher (due to terrain or obstacles in the (missed) approach segment). This restricted LCLW can be determined by using the FCOM/PD GO-AROUND CLIMB GRADIENT table in reverse [PRH B2-1.3. Go-around climb gradient]. Also: IEM-OPS 1.510 The missed approach procedure of an instrument approach as shown on in Additional requirement: When expecting a Cat II/III approach, the minimum achievable go-around climb gradient must be 2.5%. Besides regulatory restrictions, the Maximum Allowable LDW can also be limited by operational (brake cooling) restrictions regarding a quick turnaround [PRH C2-3.1. Quick Turnaround]. One of the input data to be used in several tables is the LDA, which is equal to the distance beyond the (displaced) threshold. On Jeppesen plates for example, this can be found on the airport plan. Determination LDA using JEPPESEN data In case of a planned autoland the manufacturer advices to substract 185 meters (600 ft) from the LDA in order to obtain the corresponding LFLW. 2. INFLIGHT CALCULATIONS DETERMINING LANDING DISTANCE REQUIRED AND GO-AROUND GRADIENT 2.1. REQUIRED CALCULATION EU-OPS 1.400 Before commencing an approach to land, the commander must satisfy hims For the actual LDW, with the actual landing configuration under the actual landing circumstances [ATIS], the following must be checked: LDR must not exceed the LDA. The achievable go-around climb gradient must be equal or higher than the required go-around climb gradient. 2.1.1. Landing Distance Required The LDR determined from the QRH/PI (NON) NORMAL CONFIGURATION LANDING DISTANCE table [PRH B2-2.1. Landing distance required], must not exceed the LDA [PRH A3-1.1. Landing distance available]. (1)Resulting from Non Normal Checklist. (2)Different tables for Flaps 30 and Flaps 40. (3 Regulations do not require margins in determination of LDR, but when determining the LDR when the runway is not dry, a margin of 15% is recommended which is included in the NORMAL CONFIGURATION LANDING DISTANCE data. Your company may require an additional margin on the LDR. This margin can either be a fixed value or a percentage. Using the values for Max Autobrake instead of Max Manual Braking may also serve as a margin. Required Landing Distance Additional Inflight Requirement In case the aircraft was dispatched with an ELW exceeding the LFLW (determined with no credit for headwind) according EU-OPS 1.515 [PRH A32.2.1. LFLW-Dispatch requirements], the actual LDW must not exceed the LFLW determined with credit for the actual wind. Additional information regarding braking performance data can be found in chapter C1-4. 2.1.2. Go-Around Climb Gradient The achievable go-around climb gradient, determined from the FCOM/PD GOAROUND CLIMB GRADIENT table [PRH B2-1.3. Go-around climb gradient], must be equal or higher than the required go-around climb gradient as published on the approach plate. (1) Published approach minima are normally based on a missed approach gradient of 2.5% 2.2. FACTORS AFFECTING LANDING DISTANCE The LDR determined from the QRH/PI (NON) NORMAL CONFIGURATION LANDING DISTANCE table [PRH B2-2.1. Landing distance required], assumes a touchdown point of 1000 feet, which may not be achievable in the actual operation. Several factors play a role in the actual touchdown point of the aircraft, thereby affecting the actual landing distance. 2.2.1. Autoland Due to the autopilot’s flare behavior, the aircraft will touchdown further down the runway with an autoland than with a manual landing. The additional landing distance must be taken into account when making an autoland. A 15% margin is recommended, but your company may also choose to add a fixed value on the normal LDR. The manufacturer advices to add 185 meters (600 feet) to the normal LDR to obtain the autoland LDR. Autoland flight tests revealed that the average touchdown point will be at 460 metres (1500 feet) from the threshold. With a statistical certainty of 99.7% the touchdown will occur within 645 metres (2100 feet) from the threshold. CS-AWO 142 [Automatic] Landing distance The landing distance required must be establ CS-AWO 342 [Automatic] Landing distance If there is any feature of the system or the ass 2.2.2. Aiming Point Marking For ICAO marked runways with a LDA of 2400 meters (8000 feet) or less the beginning of the aiming point marking is about 305 meters (1000 feet) from the threshold, but for ICAO marked runways with a LDA more than 2400 meters (8000 feet) this marking starts about 400 meters (1300 feet) from the threshold. The aiming point markings are 45 – 60 meters (150 – 200 feet) long. Aiming Point ICAO marked runway The aiming point marking on the runway is not always positioned at 1000 feet (305 meters) from the threshold, so when aiming for these markings, the actual touchdown point might be more than 1000 feet (305 meters) from the threshold, thereby increasing the actual landing distance. When landing at the end of the aiming point marking, the actual landing distance might be up to 500 feet (150 meters) longer than the operational landing data assume. 2.2.3. Threshold Crossing Height Manufacturer’s operational landing data are based on a threshold crossing height (TCH) of 50 feet. The actual height an aircraft crosses the threshold with, depends on several factors such as the position of the aiming point, the accuracy and glide path angle of the approach used, the PAPI / VASI accuracy and calibration reference and piloting accuracy. Rule of thumb: TCH + 10ft = LDR + 60m In case the the threshold is crossed at a height of 100 feet following a 3-degree glidepath, the aircraft will touch the runway about 1000 feet (300 meter) further down the runway compared to a TCH of 50 feet. Effect of TCH on landing distance Crossing the threshold at a height lower than 50 feet at a shallower approach angle, requires more thrust compared to a 3-degree glidepath, increasing the chance of floating with a longer landing distance as a result. 2.2.4. Threshold Crossing Speed Manufacturer’s operational landing data assume a threshold crossing speed of VREF. The speed at the 50 feet screenheight over the threshold is normally the Final Approach Speed (FAS) which is, as a standard, minimum 5 knots faster than VREF. Note that landing distance data assume VREF over the threshold.[PRH B2.2.1. Landing distance required] The actual speed an aircraft crosses the threshold with depends on several factors, such as steady wind speed, wind gusts, flapsetting and piloting accuracy. A 10% increase in FAS results in a 20% increase in required landing distance, thereby assuming a normal flare and touchdown (without floating), but in case of floating (which possibility is increased due to the higher speed) this increase might raise up to 60%. Rule of thumb: FAS + 10kts = LDR + 100m (dry rwy) / 170m (wet rwy) Rule of thumb: FAS + 10kts = LDR + 800m due to floating Flying 10 knots faster than assumed, might require up to 200 meters more landing distance without floating, and up to 1000 meters including floating, depending on runway condition and autobrake setting. The increased flare distance due to floating resulting from the excess speed usually has a bigger effect on the actual landing distance than the increased ground roll distance, because the deceleration the aircraft can achieve in the air is only a fraction of what it can achieve on the ground, even on slippery runways. 2.3. OTHER LANDING DISTANCE CONSIDERATIONS 2.3.1. Dispatch Data VS. Inflight Data The following figure shows the relation between the certified landing distance (dispatch requirement) [PRH A3-2.2.2. Certified Landing Distance] and the operational (required) landing distance. To be able to compare these, both the certified and the operational landing distance are based on MLW. The operational landing distance is considered with varying surface conditions (Airplane Braking Coeffient [PRH C1 Braking performance data]). Dispatch data VS operational data Note that EASA regulation require the operator to not only consider wet runway data in the dispatch calculations, but also (approved) contaminated runway landing distance data, in case the runway is expected to be contaminated (slippery) [PRH A3-2.2.5. LFLW contaminated (slippery) runway]. 2.3.2. Reverse Thrust with Manual Brakes VS. Autobrakes The effect of thrust reversers in combination with manual or autobrakes is given below: DRY runway MANUAL BRAKES Thrust reversers DO increase the deceleration rate. AUTOBRAKES Thrust reversers typically DO NOT increase the deceleration r The figure on the next page shows the typical 737 airplane deceleration capability on different runway conditions versus autobrake settings. The scheduled deceleration rate with maximum autobrake setting will always be reached on a dry runway with wheelbrakes only. According this figure, the same is true for A/B setting 3 on a runway with braking action GOOD. On a runway with braking action MEDIUM, the scheduled deceleration rate of A/B MAX will not be reached, and the scheduled deceleration rate for A/B 3 will be reached with the combined use of wheelbrakes and revere thrust. Deceleration capability VS. autobrake setting As runway friction deteriorates, it is less likely that the airplane will achieve the scheduled autobrake deceleration rates in which case the actual runway stopping distance will be determined by the runway friction capability. 3. BRAKE COOLING DISPATCH AND INFLIGHT CALCULATIONS 3.1. DISPATCH - Quick Turnaround Besides the LFLW and LCLW, operation can also be limited by the maximum weight for a quick turnaround (Quick Turnaround Limit Weight – QTLW), thereby limiting the LDW. The QTLW protects the wheel fuse plugs from melting during a subsequent takeoff. If a Brake Temperature Monotoring System (BTMS) is installed, it may be used instead of the QTLW table. If LDW exceeds QTLW, a minimum required ground time (see table in PD) applies, after which it must be checked that fuse plugs have not melted, before executing a subsequent takeoff. 3.2. INFLIGHT - Recommended Brake Cooling Recommended Brake Cooling Schedule provides brake energy protection if it becomes necessary to reject the takeoff. Recommended Brake Cooling Schedule provides the only means of evaluating brake cooling requirements following repeated landings at short time intervals or a rejected takeoff. QUICK TURNAROUND LIMIT WEIGHT RECOMMENDED Regulatory requirement (restriction). Advisory information Guarantees only fuse plug melt protection for the next takeoff. Guarantees fuse plug Only means of evalu I. RUNWAY STATE MESSAGE METAR Runway State Message: Information on runway conditions by an 8-figure group appended to METAR. Also referred to as (METAR) Runway Report. Report is based on the same observation / measurement as the SNOWTAM and is repeated with every subsequent weather report (METAR) until a new report is made. For practical reasons not necessarily refreshed at the same 30 minutes interval of a METAR. Repetition of a previous Runway State Message may mean that no significant changed have taken place. If an airport is closed due to snow or snow/ice removal, the term SNOCLO// may replace the 8-figure code group. II. SNOWTAM NOTAM SNOWTAM: A specialized NOTAM notifying the presence of hazardous runway conditions due to snow, ice etc. by using a specified ICAO format. Available on the NOTAM or at the AIS office as soon as the presence of contamination is considered to be operationally significant. A new SNOWTAM should normally be issued every 6 hours. For an airport with no night operations or closed at night, a new SNOWTAM should be issued 2 hours before the airport is reopened. The validity of a SNOWTAM is maximum 24 hours. If the validity expires a new observation or measurement should be made even if conditions have not changed and a new SNOWTAM should be issued. III. GLOSSARY Accelerate Stop Distance Available (ASDA) The length of the takeoff run available plus the length of stopway, if such stopway is declared available by the appropriate Authority and is capable of bearing the mass of the aeroplane under the prevailing operating conditions. Accelerate Stop Distance Required (ASDR) The required distance to accelerate with all (N) engines operating to V1 (including 1 second recognition time between VEF and V1) plus the required distance to travel 2 seconds at constant speed V1 (to allow for the transition from acceleration to the stopping configuration) plus the required distance to decelerate from V1 to a full stop. Airplane Braking Coefficient (µB) The ratio of the stopping force contribution of the wheel brakes to the average airplane weight on wheels. Airplane braking coefficient (µB) is a different parameter than the runway friction coefficient (µ). Aquaplaning (Hydroplaning) Partial or total loss of contact and friction between the tire and the runway which occurs when the tire cannot squeeze anymore of the fluid contaminant layer between its tread and lifts off the runway surface. Balanced Takeoff A takeoff for which ASDR equals TODR. Brake Energy Limit TOW A takeoff weight which, for a given runway length, is limited by the amount of energy that can be absorbed by the brakes during an aborted takeoff. Braking Action A subjective description of airplane stopping capability on a slippery runway in (ICAO) terms of Good, Good to Medium, Medium, Medium to Poor and Poor. Certified Landing Distance The Flight Test Demonstrated Landing Distance plus a required margin. Clearway An area beyond the runway, not less than 152 m (500 ft) wide, centrally located about the extended centreline of the runway, and under the control of the airport authorities. Climb gradient The ratio, expressed as a percentage, of the change in geometric height divided by the horizontal distance travelled in a given time. Climb Limit TOW A takeoff weight which is limited by the ability of the airplane to achieve the minimum required climb gradient with one engine inoperative in still air. Compacted snow Snow which has been compressed into a solid mass such that the aeroplane wheels, at representative operating pressures and loadings, will run on the surface without causing significant rutting. Contaminated runway A runway where more than 25% of its surface area (whether in isolated areas or not) within the required length and width being used is covered by the following: • Surface water more than 3 mm (0.125 inch) deep, or by slush, or loose snow, equivalent to more than 3 mm (0.125 inch) of water; • Snow, which has been compressed into a solid mass which resists further compression and will hold together, or break into lumps if picked up (compacted snow); or • Ice, including wet ice. Cost Index (CI) Parameter which reflects the relationship between time-related costs versus fuel costs. Damp runway A runway with a surface not being dry, but when the moisture on it does not give it a shiny appearance. Derated takeoff thrust A takeoff thrust level less than the maximum takeoff thrust, for which exists in the AFM a set of separate and independent, or clearly distinguishable, takeoff limitations and performance data that complies with all the takeoff requirements. When operating with a derated takeoff thrust, the value of the thrust setting parameter which establishes thrust for takeoff is presented in the AFM and is considered a normal takeoff operating limit. Driftdown Ceiling The maximum altitude that can be flown at the driftdown speed with one engine inoperative. Dry runway A runway which is neither wet nor contaminated, and includes those paved runways which have been specially prepared with grooves or porous pavement and maintained to retain ‘effectively dry’ braking action even when moisture is present. Dry (loose) snow Fresh snow that can be blown, or, if compacted by hand, will fall apart upon release (also commonly refered to as loose snow), with an assumed specific gravity of 0.2. ECON speed Speed based on the cost index, therefore offering the least costs. EGT Margin The difference between the EGT Red Line and the EGT, observed on an engine at TO/GA with OAT greater than the Corner Point OAT. Engine Failure speed (VEF) The calibrated airspeed at which the critical engine is assumed to fail. Field Length Limit TOW A takeoff weight which is limited by the ability of the airplane, following an engine failure at VEF, to either continue and reach the screenheight or stop within the runway limits. Final Approach Speed (FAS) The airspeed to be maintained down to 50 feet over the threshold. Flare distance (takeoff) The distance from liftoff to the point where the screenheight is reached. Flare distance (landing) The distance from 50ft over the threshold to the touchdown point. Flight Test Demonstrated Landing Distance The shortest landing distances possible for a given airplane weight representing the best performance the airplane is capable of (without reversers) for the conditions. It is the demonstrated distance on a dry runway, measured from a height of 50 feet above the landing surface using an aggressive touchdown technique, maximum manual wheel braking and speed brakes, but without credit for reverse thrust during the landing ground roll. Fluid contaminants Contaminants with a measurable depth which are drag producing and tire braking friction reducing. Fuel Mileage (Specific Range) The distance the airplane can fly using a given amount of fuel. Go-around climb gradient The ratio, expressed as a percentage, of the change in geometric height divided by the horizontal distance travelled in a given time during the go-around. Grooved or Porous Friction Course (PFC) runway A paved runway that has been prepared with lateral grooving or a porous friction course (PFC) surface to improve braking characteristics when wet. Gross Drifdown Flight Path Actual drifdown flight path which is required to be more penalizing than the Net Driftdown Flight Path by a regulatory margin (1.1 % for a 2 engine aircraft). Gross T/O Flight Path Actual flight path with one engine inoperative which is required to be more penalizing than the Net T/O Flight Path by a regulatory margin (0.8% for a 2 engine aircraft). Hard contaminants Solid contaminants with no measurable depth (depth is not relevant) which are tire braking friction reducing. Hydroplaning (Aquaplaning) Partial or total loss of contact and friction between the tire and the runway which occurs when the tire cannot squeeze anymore of the fluid contaminant layer between its tread and lifts off the runway surface. Ice Water which has frozen on the runway surface, including the condition where compacted snow transitions to a polished ice surface. Improved Climb Trading excess runway for higher takeoff speeds to increase the aerodynamic efficiency, resulting in better climb performance. Landing Climb Limit weight A landing weight which is limited by the approach and landing climb requirements. Landing Distance Available (LDA) The length of the runway which is declared available by the appropriate Authority and suitable for the ground run of an aeroplane landing. Landing Field Limit Weight (LFLW) The maximum weight for which the Landing Distance Available (LDA) equals the required Certified Landing Distance. Lift off speed (VLOF) The calibrated airspeed at which the airplane first becomes airborne. Line-up corrections The adjustments made to the available runway length to account for the fact that some of the runway length is used for aligning the aircraft on the runway prior to beginning the takeoff roll. Loose (dry) snow Fresh snow that can be blown, or, if compacted by hand, will fall apart upon release (also commonly refered to as loose snow), with an assumed specific gravity of 0.2 kg/m3. Maximum Brake Energy speed (VMBE) The maximum speed, for a given TOW, at which the brakes are able to absorb the built-up energy (which is a function of weight and speed) and still be effective. Maximum Range Cruise speed (MRC) The speed at which, for a given weight, the highest possible fuel mileage is achieved. Minimum Control speed – Air (VMCA) The calibrated airspeed, at which, when the critical engine is suddenly made inoperative, it is possible to maintain control of the aeroplane with that engine still inoperative, and maintain straight flight with an angle of bank of not more than 5º. Minimum Control speed – Ground (VMCG) The calibrated airspeed during the take-off run at which, when the critical engine is suddenly made inoperative, it is possible to maintain control of the aeroplane using the rudder control alone. Minimum Unstick speed (VMU) The lowest speed at which the aircraft can lift off the ground and safely fly away. Net Driftdown Flightpath A theoretical flightpath which must clear all obstacles vertically with at least 2000 feet during descent and with at least 1000 feet after level-off and must maintain level flight at least 1500 feet above the airport of intended landing, meeting weather and landing performance requirements. Net T/O Flight Path Theoretical flight path starting at the end of the TODA at 35 feet and clearing all obstacles by at least 35 feet. Obstacle Limit TOW A takeoff weight which is limited by the ability of the airplane to clear obstacles in the takeoff path by the minimum required margin. Optimum Altitude Altitude which offers the highest fuel mileage (or specific range). Porous Friction Course (PFC) or grooved runway A paved runway that has been prepared with lateral grooving or a porous friction course (PFC) surface to improve braking characteristics when wet. Quick Turnaround Limit Weight The maximum landing weight for which there is no minimum ground time required with respect to possible fuse plug melting. This weight does not guarantee sufficient brake energy absorbtion in case of a subsequent aborted takeoff. Rotation speed (VR) The speed at which the pilot initiates action to raise the nose gear off the ground. Rebalancing Rescheduling V1 in order to fix the disturbed balance between stop and go, affected by reduced acceleration or deceleration capability, with a lower Field Length Limit TOW as a result. Reduced takeoff thrust A takeoff thrust less than the takeoff (or derated takeoff) thrust. The aeroplane takeoff performance and thrust setting are established by approved simple methods, such as adjustments, or by corrections to the takeoff or derated takeoff thrust setting and performance. When operating with a reduced takeoff thrust, the thrust setting parameter which establishes thrust for takeoff is not considered a takeoff operating limit. Reference Speed (VREF) The reference landing approach speed for a defined landing configuration. Runway Friction The capability of the runway surface to convert the vertical load on the braked wheels into a horizontal force to stop the airplane. The Greek letter µ (‘mu’) is typically the symbol for friction and represents the percentage of the vertical load converted into a horizontal force. Runway End Safety Area (RESA) An area symmetrical about the extended runway center line and adjacent to the end of the strip primarily intended to reduce the risk of damage to an airplane undershooting or overrunning the runway. Runway Safety Area The surface surrounding the runway prepared or suitable for reducing the risk of damage to airplanes in the event of an undershoot, overshoot, or excursion from the runway. Runway State Message Information on runway conditions by an 8-figure group appended to METAR. Second segment climb requirement Regulations require the aircraft to be able to reach a climb gradient of 2.4% in the part of the takeoff segment which extends from the point where the gear is retracted until the acceleration height (minimum 400ft AAL), which is generally the most limiting climb requirement. SID deviation point A specified point on the SID where an emergency turn deviates from the normal departure route. SID restriction point A specified point (or altitude) on the SID after (or above) which following the SID assures sufficient obstacle clearance with one engine inoperative. Slush Partly melted snow or ice with a high water content, from which water can readily flow, with an assumed specific gravity of 0.85. SNOWTAM A specialized NOTAM notifying the presence of hazardous runway conditions due to snow, ice etc. by using a specified ICAO format. It is available on the NOTAM or at the AIS office as soon as the presence of contamination is considered to be operationally significant. Specific Gravity Relative density defined as the ratio of the density of a given substance to the density of water when both substances are at the same temperature. Substances with a specific gravity greater than 1 are more dense than water, and those with a specific gravity of less than 1 are less dense than water. Expressed as a dimensionless value. Specific Range (Fuel Mileage) The distance the airplane can fly using a given amount of fuel. Stall speed (VS) The minimum steady flight speed at which the airplane is controllable. Standing water Water of a depth greater than 3mm. Stopway An area beyond the takeoff runway, no less wide than the runway and centered upon the extended centreline of the runway, able to support the aeroplane during an abortive takeoff, without causing structural damage to the aeroplane, and designated by the airport authorities for use in decelerating the aeroplane during an abortive takeoff. Structural weight The maximum weight the airframe, landing gears and wings can support. Takeoff Decision speed (V1) The speed used as a reference in the event of engine or other failure in deciding whether to continue or reject the takeoff. Takeoff Distance Available (TODA) The length of the takeoff run available plus the length of the clearway available. Takeoff Distance Required (TODR) The greater of: (1) The required distance to accelerate with all (N) engines operating to VEF, plus the required distance to accelerate with one engine inoperative (N-1) to V2 at a screenheight of 35 feet (wet or contaminated runway: 15 feet) above the takeoff surface; or (2) The required distance to accelerate with all (N) engines operating to a screenheight of 35 feet, plus a distance margin of 15%. Takeoff Safety speed (V2) The target speed to be reached at the screenheight, assuming an engine failure at or after V1. Takeoff Run Available (TORA) The length of runway which is declared available by the appropriate Authority and suitable for the ground run of an aeroplane taking off. Takeoff Run Required (TORR) The greater of: (1) The distance to takeoff and climb to a point equidistant between lift off and the 35 feet height point with a failure of the critical engine at VEF; or (2) 115 percent of the distance to takeoff and climb to a point equidistant between lift off and the 35 feet height point with all engines operating. Notes: 1. On a wet runway, the height requirement with a failed engine is 15 feet. 2. On a wet runway, the takeoff run required is the distance to takeoff and climb to 15 feet with a failure of the critical engine at VEF. TAS (True Airspeed) effect The effect that, with assuming a higher than actual OAT when applying the assumed temperature reduced takeoff thrust method, the actual TAS is lower than assumed, leaving a performance margin. Thrust effect The effect that, with assuming a higher than actual OAT when applying the assumed temperature reduced takeoff thrust method, the actual thrust output is higher than assumed, leaving a performance margin. Tire Speed Limit TOW A takeoff weight that requires a liftoff speed equal to the tire speed limit. Unbalancing Using any value other than balanced V1. V1MCG Limit Weight The maximum weight for which the airplane can accelerate to VMCG and just be able to stop within the available accelerate stop distance. Water Equivalent Depth (WED) Converted fluid contaminant layer thickness equivalent to water layer thickness. Wet runway A runway where the surface is covered with water, or equivalent precipitation, less than specified as ‘contaminated runway’, or when there is sufficient moisture on the runway surface to cause it to appear reflective, but without significant areas of standing water. Wet snow Snow that will stick together when compressed, but will not readily allow water to flow from it when squeezed, with an assumed specific gravity of 0.5. IV. ABBREVIATIONS A AAL Above Airport Level A/B Autobrake ABC Airplane Braking Coefficient Act Actual AFM-DPI Airplane Flight Manual – Digital Performance Information (software) AI Anti Ice systems (EAI / WAI) AMC Acceptable Means of Compliance AOA Angle Of Attack APU Auxiliary Power Unit ASD-A/R Accelerate Stop Distance – Available/Required Ass Assumed ATC Air Traffic Control ATIS Automatic Terminal Information System ATM Assumed Temperature Method AWO All Weather Operations B BA Braking Action BRLW Brake Release Limit Weight BTMS Brake Temperature Monitoring System C CDU Control Display Unit CFM (GE) Commercial Fan and (Snecma) Moteurs (engine manufacturer) CG Center of Gravity CI Cost Index CL Lift coefficient CL Centerline CLD Certified Landing Distance CLTOW Climb Limit Takeoff Weight Corr Corrected CNTM Contaminated CS Certification Specifications Cwy Clearway D D Drag DD Driftdown E EAI Engine Anti Ice system EASA European Aviation Safety Agency EEC Electronic Engine Control EFB Electronic Flight Bag EGT Exhaust Gas Temperature ELW Estimated (planned) Landing Weight ETA Estimated Time of Arrival F F Force FAR Federal Aviation Regulations FAS Final Approach Speed FCOM/PD Flight Crew Operations Manual / Performance Dispatch section FCOM/PI Flight Crew Operations Manual / Performance Inflight section FMC Flight Management Computer FPPM Flight Planning & Performance Manual FRT Flat Rated Temperature FTDLD Flight Test Demonstrated Landing Distance G GA Go-Around GS Ground speed H HAA Height Above Airport HWC Head Wind Component I ICAO International Civil Aviation Organisation Inop Inoperative IEM Interpretative Explanatory Material ISA International Standard Atmosphere J JAA Joint Aviation Authorities JAR Joint Aviation Requirements L LCLW Landing Climb Limit Weight LDA / R Landing Distance Available / Required LDW Landing Weight LE Leading Edge LFLW Landing Field Limit Weight LRC Long Range Cruise LW Limit Weight M MAC Mean Aerodynamic Chord Max Maximum MCT Maximum Continuous Thrust MEL Minimum Equipment List METAR Meteorological Airport Report min minimum MRC Maximum Range Cruise MTOW Maximum Takeoff Weight N N All engines operating N-1 One engine inoperative NG Next Generation NM Nautical Mile NOTAM Notice To Airmen O OAT Outside Air Temperature OAA Obstacle Accountability Area P P Pressure PA Pressure Altitude PANS-OPS Procedures for Air Navigation Services - Aircraft Operations PFC Porous Friction Course (runway surface type) PLLDW Performance Limit Landing Weight PLTOW Performance Limit Takeoff Weight PRH Performance Reference Handbook (this guide) Q QNH Pressure at SL based on airport elevation QRH/PI Quick Reference Handbook / Performance Inflight section QTLW Quick Turnaround Limit Weight R RESA Runway End Safety Area RTO Rejected Takeoff RVR Runway Visual Range RVSM Reduced Vertical Separation Minima RWY(S) Runway(s) S SAFO Safety Alert for Operators SID Standard Instrument Departure SL Sea Level SM Statute Mile Spwy Stopway T T Thrust TASSUMED Assumed temperature TAS True Airspeed Temp Temperature TL (chart) Takeoff Limiting (chart) T/O Takeoff TODN Takeoff Distance - all engines operating TODN-1 Takeoff Distance - one engine inoperative TODA / R Takeoff Distance Available / Required TOF Takeoff Fuel TO/GA Takeoff / Go-Around thrust level TORA Takeoff Run Available TOW Takeoff Weight T/R Thrust Reverser TWC Tail Wind Component TWY(S) Taxiway(s) U UTC Universal Time Coordinated V V1 Takeoff Decision speed V1MCG V1 equal to VMCG V2 Takeoff Safety speed VEF Event speed (i.c.o. continued takeoff: Engine Failure speed) VG Ground speed VHP Hydroplaning speed VLOF Liftoff speed VMBE Maximum Brake Energy speed VMCA Minimum Control speed – Air VMCG Minimum Control speed – Ground VMCL Minimum Control speed – Landing VMU Minimum Unstick speed VMINCLEAN Minimum Clean speed VR Rotation speed VREF Reference landing speed VS Stall speed VS1G Stall speed – unaccelerated (1G) VSR Reference stall speed VSR0 Reference stall speed landing configuration VTIRE Maximum Certified Tire speed V/S Vertical speed W W Weight WAI Wing Anti Ice system WED Water Equivalent Depth Z ZFW Zero Fuel Weight V. REFERENCES REGULATIONS EASA 1. Certification Specifications for Large Aeroplanes, CS-25, Amendment 9 2. Certification Specifications for All Weather Operations, CS-AWO 3. Definitions and abbreviations used in Certification Specifications for products, parts and appliances, CS-Definitions 4. EU-OPS Subpart F Performance General 5. EU-OPS Subpart G Performance Class A ICAO 1. Procedures For Air Navigation Services Aircraft Operations (Pans-Ops, Doc 8168) 2. Annex 6, Part 1, Operation of International Commercial Air Transport – Aeroplanes, 8th edition 3. Annex 14, Volume 1, Aerodrome design and operations, 4th edition 4. Ice- and Snowtable OFFICIAL INFO BULLETINS / RECOMMENDATIONS CAA 1. Landing Performance of Large Transport Aeroplanes, AIC 14/2006, feb 2006 2. Guidance for operations on a runway that is notified by NOTAM as ‘MAY BE SLIPPERY WHEN WET’, FODCOM 28/2007 3. The importance of using performance data appropriate to the existing runway conditions, FODCOM 03/2009 FAA 1. Runway Overrun Prevention, Advisory Circular (AC) 91-79, nov 2007 ARTICLES Boeing 1. Driftdown and Oxygen Procedures Over High Terrain – Requirements and Analysis Methods, Catherine Davis, sep 2003 2. Reduced Thrust Considerations, Dick Mayward, may 2004 3. Performance Margins, Paul Schmid, Performance Conference 2007 4. Landing on Slippery Runways, Paul Giesman, Performance Conference 2007 5. Improved Climb – Benefits, Method and other Considerations, Scott Brown, Performance Conference 2007 6. Wet runway – Physics, Certification, Application, Paul Giesman, Performance Conference 2007 NLR 1. A method for prediciting the rolling resistance of aircraft tires in dry snow, NLR-TP-99240, G.W.H. van Es, 1999 2. Running out of runway, NLR-TP-2005-498, G.W.H. van Es, 2005 Flight Safety Foundation 1. International Regulations Redefine V1, Flight Safety Digest, oct 1998 2. A Review of Transport Airplane Performance Requirements Might Benefit Safety, Flight Safety Digest, feb 2000 3. The Final Approach Speed, ALAR Briefing Note 8.2, Flight Safety Digest, aug-nov 2000 4. Landing Distances, ALAR Briefing Note 8.3, Flight Safety Digest, aug-nov 2000 5. Wet or Contaminated Runways, ALAR Briefing Note 8.5, Flight Safety Digest, aug-nov 2000