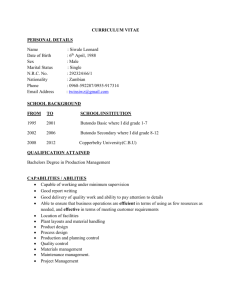
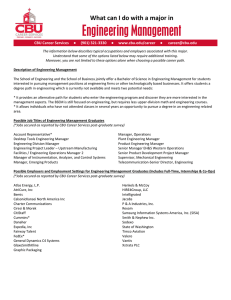
28/01/2021 Lecture 3: More on embedded hardware • Thus far we have looked at various memory devices however we shall tackle more on memory as we start to put things into practice. Aspects on the various RAM devices, bootstrapping and linked lists will be looked at when we tackled applications of C programming. • Before we continue looking at other subsystems of a microcontroller, there is need to understand what controls the speed at which tasks are executed. The speed of operation is controlled by an external time base which may be provided by an external quartz crystal, a programmable oscillator, a ceramic resonator or an internal time base. • µC can operate up to 50MHz depending on the required speed of operation. For example to control a 24 h clock time whose mechanical speed is slower compared to that of µC, a 32.768 KHz time base is used. MC 401 - CBU SE 19 19 The Timing Subsystem The main clock is sent throughout the µC to provide synchronisation of the subsystems. To this effect most µC are equipped with a timing subsystem. The following parameters which most of you have already come across affect signal timing and are critical for certain µC operations such as motor control: • Frequency: Signal frequency is the number of cycles per second completed by a repetitive signal. It is expressed in units of Hertz (Hz). • Period: The period is the time increment in seconds required for a repetitive signal to complete a single cycle. The period is the reciprocal of the frequency (T = 1/ f ). • Duty cycle: The duty cycle indicates the percentage of time for which the signal is active in a single period. • Pulse width modulation (PWM):PWM signals are frequently used to control motor speed. The digital PWM signal is converted to an effective DC value by the mechanical inertia of the motor as well as the low pass filter characteristics of the inductance inherently present in a motor. Note in Figure 3.1 how various effective DC voltages can be delivered to a load by simply adjusting the duty cycle of the digital PWM signal. MC 401 - CBU SE 20 20 1 28/01/2021 Timing Concepts To take full control of the time base operations in the microcontroller, most of the devices are equipped with a multichannel timing system. These channels in the system may be configured to do the following: • Measure parameters of the input signal such as the period and the duty cycle. • Generate precision output pulses or repetitive signals • Count incoming pulses present in the input signal • Generate PWM signals These abilities can be harnessed during practical applications as we shall see later in the course. Figure 3.1: Timing Concepts MC 401 - CBU SE 21 21 Port Systems • Recall from the µC structure in our second lecture that there is a range of ports available to connect the device to the outside world. • The ports are usually arranged as an eight bit input/output port system. • A data direction register can be used to set the direction of a given port ie. Input or output. • These ports are used for the input and output of digital signals, they can be equipped with functions such as analogue-to-digital conversion (ADC), serial communication and network interfacing. We shall discuss these feature briefly in this lecture but dwell on them as the course progresses. • What happens when the design requires more ports than what the microcontroller has? The ports have a time multiplexed capability which allows the function of each port to alternate at a given interval of time. MC 401 - CBU SE 22 22 2 28/01/2021 ADC and Communication for interfacing Brief introduction to ADC • ADC subsystems present in the µC enable the conversion of time varying analogue signals such as temperature, vibration, humidity from the outside world to binary 1s and 0s suitable for use by the µC. • The continuous signal is expressed as a series of digital snapshots with thresholds determining if a value should be a binary 1 or 0. • Depending on the design, the programmer can determine how often ADC operations are required. A temperature reading that has to be stored in memory may require ADC every time the thermometer gives a reading. MC 401 - CBU SE 23 23 Communication systems The two most common types of communication systems for µCs are : • Serial • RS 232 USB communication is also fast becoming popular for most applications. To send and receive data over data over long distances serial communication is used for microcontrollers. To best understand µC serial communications the following common terms should be known: • Simplex mode: In this mode, the serial communication is accomplished by transmitting data in one direction at a time. • Duplex mode: In this serial communication mode, data can be transmitted and received from both ends of the communication link at the same time. • BAUD rate: The rate of bits sent or received. It describes the number of bits communicated per second. MC 401 - CBU SE 24 24 3 28/01/2021 Com systems cont. • ASCII code: The American Standard Code for Information Interchange code is used in communication to encode alphabets, numbers, punctuation, and control characters using a seven-bit representation. ASCII is a subset of the international Unicode standard. • Bit time: The time required to transmit or receive a single bit. • Serial line code: A specific encoding mechanism used to transmit and receive information. Note: It is important that both the transmitter and receiver use a common line code, BAUD rate, and parity setting for proper communications. MC 401 - CBU SE 25 25 The RS-232 Protocol Many peripheral devices are equipped to communicate with an RS-232 compatible interface. The “RS-232” is an Electronic Industry Association (EIA) standard formally designated EIA-232-D. This standard specifies the different aspects of a serial communication interface including: • electrical specifications, • functional signal specification, • mechanical specification, and • procedural specifications. A variety of chips are available to translate microcontroller compatible signals to RS-232 compatible signals. The RS-232 standard represents a logic high with a −10 VDC level and a logic low with a +10 VDC level. These chips are equipped to provide interfacing for a two way (transmit and receive) communication system. That is, the output serial bit stream from a microcontroller to a RS-232 compatible peripheral device must be converted to a RS-232 signal. The serial bit stream returning from the peripheral device must be converted from the RS-232 format back to microcontroller compatible signal levels. MC 401 - CBU SE 26 26 4 28/01/2021 The interrupt system! Figure 3.2 shows the normal sequence of a program which is fetch, decode and execute. However, sometimes there exists a high priority event that needs to interrupt this normal sequence. When such a high priority or status occurs, the µC temporarily suspends normal operation to execute event specific actions. A fault can be an example of a high priority event. Figure 3.2: The concept of interrupts This action of servicing an event is referred to as an interrupt service routine. It is important that this interruption is orderly and allows smooth continuation of normal operation after the interrupt service. To do this a µC uses what is known as a stack. A stack is a temporary storage location set aside as a part of RAM. MC 401 - CBU SE 27 27 Interrupts cont. When an interrupt occurs the microcontroller will finish executing the current instruction. It will then place context information, key register values and the return address to the normal program, on the stack. The interrupt service routine (ISR) will then be executed. The ISR consists of the microcontroller activity required by the interrupt. When the ISR is finished, control will return to the program that was executing when the interrupt occurred. The context information previously stored on the stack will be used to restore the controller to its pre-interrupt configuration. Interrupts are usually generated by hardware and software malfunctions. The two most common interrupts available to a designer are: • Real time interrupt (RTI) • External Interrupt Request (IRQ) MC 401 - CBU SE 28 28 5 28/01/2021 Interrupts cont. • The RTI is common and usually performs checks on critical system status issues like the battery level. This interrupt can also be used to update the real time clock. • On the other hand, the IRQ has an external hardware pin which can be activated by putting say a jumper across it. Once activated the ISR is generated and executed. • This allows an external system to alert the µC that an external fault has occurred. An example of this is in a motorised gate operation. If something external is blocking the gate from opening like a rock, an IRQ can be issued to alert the µC of this condition. Otherwise the µC will continue issuing an instruction to open the gate and cause the motor to get damaged. End of Lecture 3! MC 401 - CBU SE 29 29 6