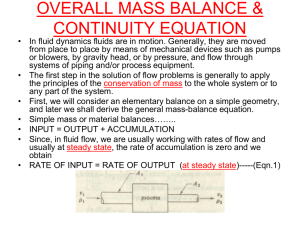
123 Tutors Notes For MTV 310 1 Basic Fluid Principles 1.1 The Concept of Fluid • In fluid mechanics we must states of matter, solid and fluid. • Solid can withstand shear stress because of the strong intermolecular forces between particles which are closely packed. • A fluid is affected by the slightest of shear stress because of the weaker intermolecular forces between particles. 1.2 Dimensions • We will encounter different fluid characteristics which need to be defined qualitatively and quantitatively. 1. Qualitative: describes the nature or type of the characteristic (velocity, stress, length etc.) the characteristic is based on the primary quantities or the base dimensions (Length, Time, Temperature and Mass). 2. Quantitative: describes the numerical measure. 1.3 Properties of Fluid 1.3.1 Viscosity • Quantitative measure of a fluid resistance to flow • It determines the fluid strain rate from the applied shear stress • The shear stress is proportional to the velocity gradient 𝜏= 𝜇 𝑑𝑢 𝑑𝑦 (1) • Viscosity is weakly affected by pressure. • For gases viscosity increases with increase in temperature because the average velocity of the molecules increases thus more intermolecular collisions and interactions limiting macroscopic mobility. • viscosity decreases for liquids with increase in temperature since the velocity of particles increase meaning less interaction with other particles. 1.3.2 Reynolds Number • Parameter correlating the viscous behaviour of all Newtonian fluids. 𝑅𝑒 = 𝜌𝑉𝐿 𝑉𝐿 = 𝜇 𝜗 (2) 1.3.3 Vapor Pressure • The pressure a liquid boil at whilst in equilibrium with its vapour • Liquid pressure > Vapor pressure = evaporation • Liquid pressure < Vapor pressure = cavitation (bubbles) 1.3.4 Newtonian & Non-Newtonian Fluid Fluids that do not follow the linear law of Eq. (1) are called non-newtonian 2 Fluid Statics 2.1 Pressure and Pressure Gradient • No pressure changes in the horizontal direction • Pressure in the vertical is proportional to density, gravity, and depth change. Most Liquids are incompressible, and gravity is roughly the same meaning depth change is the most important factor. • Gage pressure: pressure measured relative to the atmosphere 𝑃𝑔𝑎𝑔𝑒 = 𝑃 − 𝑃𝑎𝑡𝑚 • (3) Absolute is the total magnitude of pressure. Pressure not listed with a modifier we assume it to be absolute pressure. 2.2 Manometry • Standard technique for measuring pressure using liquid in vertical or inclined tubes e.g. piezometer, U-Tube Manometer or Barometer. 𝑝2 − 𝑝1 = − 𝛾(𝑧2 − 𝑧1 ) (4) 2.3 Hydrostatic Forces on Plane Surfaces • When a surface is submerged in a fluid, forces develop on the surface due to the fluid. • These forces need to be determined to design ships, storage tanks etc. • The forces will act in a perpendicular direction for a fluid at rest. • During calculations it is important to determine the centre of gravity and centre of pressure. • Force due to the liquid is calculated at the centre of gravity but acts through the centre of pressure to balance moments. 𝑦𝑐𝑝 = −𝑠𝑖𝑛𝜃 𝑥𝑐𝑝 = −𝑠𝑖𝑛𝜃 𝐼𝑥𝑥 ℎ𝐶𝐺 𝐴 𝐼𝑥𝑦 ℎ𝐶𝐺 𝐴 (5) (6) 2.4 Hydrostatic Forces on Curved Surfaces • The resultant pressure force is computed by separating it into vertical and horizontal components. • The horizontal component of force on a curved surface equals the force on the plane area formed by the projection of the curved surface onto a vertical plane normal to the component. 𝐹𝐻 = 𝛾ℎ𝐶𝐺 𝐴𝑝𝑟𝑜𝑗𝑒𝑐𝑡𝑖𝑜𝑛 Figure 1 Horizontal and Vertical Projections • The vertical component of pressure force on a curved surface equals in magnitude and direction the weight of the entire column of fluid, both liquid and atmosphere, above the curved surface. 𝐹𝑉 = 𝛾𝑓𝑙𝑢𝑖𝑑 × 𝑣𝑜𝑙𝑢𝑚𝑒 𝑜𝑓 𝑓𝑙𝑢𝑖𝑑 2.5 Buoyancy • A body in a fluid experiences a vertical buoyant force equal to the weight of the fluid it displaces. • A floating body displaces its own weight in the fluid in which it floats. 1 𝐹𝐵 = 𝜌𝑔𝑉 Figure 2 Buoyancy (Saddlespace.org, 2020) 3 Integral Relations for a Control Volume • • • Laws to be discussed apply to a system Anything outside the boundaries of the system is the surroundings Mass of a system is constant. Law of mass conservation applies. 2 𝑑𝑚 =0 𝑑𝑡 • If external forces act of a system, the summation of all the external forces causes mass of the system to accelerate. 3 𝐹 = 𝑚𝑎 = 𝑚 • 𝑑𝑉 𝑑𝑡 Mass flowrate can be calculated from: 4 𝑚̇ = 𝜌𝑄 = 𝜌𝐴𝑉 • Mass conservation in a control volume for a steady and incompressible flow leads to: 5 ∑(𝜌𝑖 𝐴𝑖 𝑉𝑖 )𝑜𝑢𝑡 = ∑(𝜌𝑖 𝐴𝑖 𝑉𝑖 )𝑖𝑛 𝑖 • 𝑖 Conservation of momentum for steady incompressible flow: 6 ∑ 𝐹 = ∑(𝑚̇𝑉)𝑜𝑢𝑡 − ∑(𝑚̇𝑉)𝑖𝑛 • Bernoulli equation for frictionless flow along a streamline. 7 𝑝1 1 2 𝑝2 1 2 + 𝑉1 + 𝑔𝑧1 = + 𝑉 + 𝑔𝑧2 𝜌 2 𝜌 2 2 4 Dimensional Analysis and Similarity 4.1 Dimensional Analysis Dimensional Analysis: a method for reducing the number and complexity of experimental variables that affect a given physical phenomenon. In doing so we save time and money. Let us look at a typical fluid mechanics problem in which an experiment is required, consider steady flow of an incompressible Newtonian fluid through a long smooth-walled, circular horizontal pipe. An Engineer designing a pipe would be interested in the pressure drop∆𝑃𝑙 per unit length along the pipe. The first step would be to determine the variables that affect the pressure drop which are: pipe diameter D, fluid velocity V, fluid density 𝜌 and fluid viscosity µ. ∆𝑃𝑙 = 𝑓(𝐷, 𝑉, 𝜌, 𝜇 ) One way of performing the experiment would be by changing one variable whilst keeping the others constant. The process takes time, and you would hit a brick wall when now combining all the experiments to determine the effect of the variables combined. However, Dimensional Analysis comes to the rescue by reducing the number of variables from 5 to just two dimensionless groups. 𝐷∆𝑃𝑙 𝜌𝑉𝐷 = 𝜌𝑉 2 𝜇 Experiments can therefore be done on these two dimensionless groups varying the one on the RHS and see how the one on the LHS responds. As shown in Figure 3. Figure 3 Plot of pressure drop data using dimensionless parameters (Munson, 2013) 4.2 The Principle of Dimension Homogeneity If an equation truly expresses a proper relationship between variables in a physical process, it will be dimensionally homogeneous; that is, each of its additive terms will have the same dimensions. For example: 𝑉 = 𝑉0 + 𝑎𝑡 And 𝑃 𝜌 1 + 2 𝑉 2 + 𝑔𝑧 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 4.3 The Pi Theorem The reduction in variables to expect from the Pi Theorem is determined from: If an equation involving k variables is dimensionally homogeneous, it can be reduced to a relationship among k-r independent dimensionless products, where r is the minimum number of reference dimensions required to describe the variables. For example, an equation having k variables such as: 𝑢1 = 𝑓(𝑢2 , 𝑢3 . . . 𝑢𝑘 ) the dimensions of the variable on the left side of the equal sign must be equal to the dimensions of any term that stands by itself on the right side of the equal sign. It then follows that we can rearrange the equation into a set of dimensionless products (pi terms) so that: 𝜋1 = ∅(𝜋2 , 𝜋3 … 𝜋𝑘−𝑟 ) Determination of Pi Terms 1. List all the variable involved This is the most important step otherwise the analysis will fail. All the variables listed must be independent e.g., you cannot list cross-sectional area of a pipe and its diameter, rather list the diameter. 2. Describe each variable in terms of the base dimensions (L, M, T, 𝜃). 3. Determine the number of Pi terms to be found using k-r where k is the number of variables and r is the number of base dimensions. 4. Select a number of repeating variables, where the number is equal to the base dimensions available. I. Do not select the dependent variable as one of the repeated variables. II. All the base dimensions must be in the group of the selected repeating variable. III. The repeating variables should not form a dimensionless group on their own. IV. Try to select the simplest variables dimensionally. 5. Form a pi term by multiplying one of the nonrepeating variables by the product of the repeating variables, each raised to an exponent that will make the combination dimensionless. Essentially each pi term will be of the form 𝑢1 𝑢2𝑎 𝑢3𝑏 𝑢4𝑐 where is u1 one of the nonrepeating variables and (𝑢2 , 𝑢3 , 𝑢4 ) are the repeating variables and the exponents a, b and c are determined so that the combination is dimensionless. 6. Repeat Step 5 for each of the remaining nonrepeating variables. 7. Check if all the Pi groups are dimensionless. 4.4 Similarity A model is a representation of a physical system that may be used to predict the behaviour of the system in some desired respect. The physical system for which the predictions are to be made is called the prototype. Flow conditions for a model test are completely similar if all relevant dimensionless parameters have the same corresponding values for the model and the prototype. The different kinds of similarity are: Geometric Similarity: the model must be the same shape as the prototype but may be scaled by some constant factor. Figure 4 Geometric Similarity (White, n.d) Kinematic Similarity: the velocity at any point in the model flow must be proportional by a constant scale factor to the velocity at the homologous point in the prototype flow. (That is, the flow streamlines must have the same shape.) Figure 5 Kinematic Similarity (Kinematic Similarity, 2020) Dynamic Similarity: all forces in the model flow must scale by a constant factor to the corresponding forces in the prototype flow. In other words, the relative importance of different types of forces (e.g., viscous, and inertial forces) must be the same for the model and prototype. This requires that the model and prototype have the same dimensionless parameters (e.g., the same Reynolds number), although they may (and usually do) have different dimensional variables. Mathematically, for all pi groups that can be defined for two different flow situations, dynamic similarity requires that: 𝝅𝒎𝒐𝒅𝒆𝒍 = 𝝅𝒑𝒓𝒐𝒕𝒐𝒕𝒚𝒑𝒆 The geometric and kinematic similarity are necessary but insufficient conditions for dynamic similarity. That is, it is possible to have geometric and kinematic similarity, but not dynamic similarity. Question Solution QUESTION The natural frequency ω of vibration of a mass M attached to a rod, as in the figure below, depends only on M and the stiffness EI and length L of the rod. Tests with a 2-kg mass attached to a 1040 carbon steel rod of diameter 12 mm and length 40 cm reveal a natural frequency of 0.9 Hz. Use these data to predict the natural frequency of a 1-kg mass attached to a 2024 aluminum alloy rod of the same size Solution 5 Viscous flow in Ducts 5.1 Laminar vs Turbulent Flow of fluid in a pipe is either laminar or turbulent. When flow rate increases, thus increasing the Reynolds number, fluid flow transitions from laminar to turbulent. A dye experiment by Reynolds in Figure 6 helps to visualise laminar and turbulent flow. Figure 6 Reynolds Dye Experiment. (Munson, 2013) Typically, laminar flow is: Re < 2300 And Turbulent flow is: Re > 4000. The regional in between is for transitional flow. 5.2 Head loss and the friction factor Control volume analysis is used for pipe flow problems. During flow, pressure is lost due to friction and change in elevation. This is referred to as head loss, when solving the problems, we usually assume that the flow is steady and incompressible. The formula for head loss is shown below: 𝐿 𝑉2 ℎ𝑓 = 𝑓 ( ) 𝑑 2𝑔 𝜀 Where f is the Darcy friction faction where 𝑓 = 𝑓𝑐𝑛(𝑅𝑒𝑑 , 𝑑 , 𝑑𝑢𝑐𝑡 𝑠ℎ𝑎𝑝𝑒) and ε is the wall roughness (important for turbulent flow rather than lamina flow). For interest’s sake, the pipe roughness is not important in laminar flow because: In laminar flow, you assume a fluid layer near the pipe wall with flow velocity = 0, and progressively faster flowing layers towards the middle of the pipe. That is why it is called laminar. Because there is no flow near the pipe wall, the roughness does not affect pressure loss. For laminar flow: 𝑓𝑙𝑎𝑚 = 64 𝑅𝑒𝑑 For turbulent flow the Colebrook formula is used to determine the friction factor: 𝜀 2.51 𝑑 1 = −2.0 log ( 3.7 + 1) 2 𝑓 𝑅𝑒𝑑 𝑓 2 1 The equation is not easy to solve explicitly hence the Moody Chart is used instead. The moody chart works for pipes of any shape and size in the transition to turbulent regions. Figure 7 Moody Chart (White, n.d.) Figure 8 Recommended Roughness Values for Commercial Ducts 5.3 Types of pipe flow problems 1. Head loss problem Given d, L and V or Q, 𝜌, 𝜇, and g find the head loss using ℎ𝑓 = 𝑓 𝐿 𝑉2 𝑑 2𝑔 2. Flow rate problem Given d, L, hf, 𝜌, 𝜇, g find V and or Q Approach: 𝜀 Find an initial value for f from the Moody Chart using 𝑑 by assuming Re =∞ • Using the f value calculate velocity by rearranging the head loss equation and then the Reynolds number. 𝜀 • Find a new f value using the calculated Reynolds number and 𝑑 • Calculate a new velocity value. • Repeat from step 3 until velocity converges. 3. Sizing Problem Given Q, L, hf, 𝜌, 𝜇, and g. find d Approach: 𝑓 = ℎ𝑓 And 𝑅𝑒 = • • • 𝑑 2𝑔 𝜋 2 𝑔ℎ𝑓 𝑑5 = 𝐿 𝑉2 8 𝐿𝑄 2 4𝑄 𝜋𝑑𝑣 Guess f And using f compute d using the first equation 𝜀 Compute Re and 𝑑 • Get a new f from the Moody Chart • Repeat from step 2 until f converges. 4. Sizing Problem 2 Given Q, d, hf, 𝜌, 𝜇, and g find L ℎ𝑝𝑢𝑚𝑝 𝑃𝑜𝑤𝑒𝑟 𝐿 𝑉2 = = ℎ𝑓 = 𝑓 𝜌𝑔𝑄 𝑑 2𝑔 • Manipulate the above equations to get the length of the pipe 5.4 Noncircular pipes Many pipes used to convey fluids are not circular. To calculate a Reynolds number a new formula for the hydraulic diameter is introduced and is as follows: 𝐷ℎ = 4𝐴 𝑃 Where A is the cross-sectional area of the pipe and P is the wetted perimeter (perimeter filled with the fluid). The hydraulic diameter is used to calculate Reynolds number as well as to determine the friction 𝜀 factor using 𝐷 . ℎ 5.5 Minor Losses The head loss in long straight pipes is calculated using the friction factor from the Colebrook equation or from the moody chart. However, in practice, pipes are not lays long and straight. They consist of valves, bends, tees, sudden expansion or contraction and these cause minor losses. A loss coefficient is used to factor in all the minor losses: ℎ𝑚 ∆𝑃 2 𝐾= 𝑉 = 1 2𝑔 2 2 𝜌𝑉 5.6 Multiple Pipe Systems In many pipe systems there is more than one pipe involved. The complex system of tubes in our lungs, with the relatively large-diameter trachea and ending in tens of thousands of minute bronchioles after numerous branching and the maze of pipes in a city’s water distribution system are typical of such systems. The governing mechanisms for the flow in multiple pipe systems are the same as for the single pipe systems discussed in this chapter. However, because of the numerous unknowns involved, additional complexities may arise in solving for the flow in multiple pipe systems. Some of these complexities are discussed in this section. Pipes in Series The head loss for pipes in series is the sum of the head loss of each individual pipe. The continuity equation applies for such systems to give: 𝑄1 = 𝑄2 = 𝑄3 And 𝑉1 𝑑12 = 𝑉2 𝑑22 = 𝑉3 𝑑32 The head loss is given as: ∆ℎ𝐴𝐵 = ∆ℎ1 + ∆ℎ2 + ∆ℎ3 Figure 9 Pipes in Series (Munson, 2013) Pipes in Parallel For pipes in parallel the total flow is the sum of the individual pipe flows: 𝑄 = 𝑄1 + 𝑄2 + 𝑄3 And the head loss is: ∆ℎ𝐴𝐵 = ∆ℎ1 = ∆ℎ2 = ∆ℎ3 Figure 10 Pipes in Parallel (Munson, 2013) 6 Differential Approach 6.1 Conservation of Mass Figure 11 Control Volume • Conservation of mass requires that the mass of a system remain constant. Where: 8 • We will take as our control volume as the small, stationary cubical element shown in Figure 11. At the centre of the element the fluid density is ρ and the velocity has components u, v and w. Since the element is small, the volume integral in the equation above reduces to: 9 • Assuming all properties of the fluid are varying with time and position the inlet and outlet conditions are shown below: Figure 12 inlet and outlet conditions • Realising that Equation 1 = 0. The RHS of Equation 2 is as shown below: 10 • Equation 3 then reduces to the continuity equation shown below: 11 6.2 Cylindrical Polar Coordinates For some problems it is better to represent the various differential relationships in cylindrical coordinate. A point is determined by giving the coordinates r, θ and z. The coordinate r is the radial distance from the z axis, θ is the angle measured from a line parallel to the x axis (with counter clockwise taken as positive), and z is the coordinate along the z axis. Fluid properties such as pressure, velocity, density are continuous functions of r, θ, z and t. The table below shows the names of the different directions of polar coordinates. Table 1 Direction r θ z Name radial circumferential axial The continuity equation is thus as represented below in cylindrical polar coordinates 12 The continuity equation is valid for steady or unsteady flow, and compressible or incompressible fluids, however two scenarios are of particular interest. That is steady compressible flow and incompressible flow. 1. Steady compressible flow: For this scenario the fluid properties are a function of position and not time therefore: 13 𝜕 ≡0 𝜕𝑡 The Cartesian coordinate equation reduces to: 14 The cylindrical polar coordinate reduces to: 15 2. Incompressible flow: For this scenario density does not change and: 16 𝜕𝜌 =0 𝜕𝑡 This applies for both steady and unsteady flow. The continuity equation for the Cartesian coordinate system then takes the form of: 17 For the cylindrical polar coordinate system, it becomes: 18 6.3 Momentum conservation Using the same elemental control volume as in mass conservation, but the form for linear momentum relation is: 19 Like the mass conservation, the element is too small that the volume integral simply reduces to a derivative term: 20 The rate of change of momentum through a unit area (momentum flux) occur on all six faces (3 Inlets and 3 outlets). Figure 13 Momentum Influx Introducing these terms into Equation 20 we get: 21 The equation above can be split up to be: 0 22 Continuity equation The equation is then further reduced to be: 23 There are two types of these forces, body forces and surface forces: 1. Body forces are due to external fields that act on the entire mass within an element. Gravity is the only body force that is considered. 24 2. Surface forces are due to the stresses on the sides of the control surface. These stresses are the summation of viscous stresses (they come about as a result of motion with velocity gradients) and hydrostatic pressure. Differences between the stresses mentioned cause a net force on the differential control surface. The notation for the stresses is shown below. Figure 14 Stress Notation Considering the stresses directed in the x direction as shown below: Figure 15 Stresses in the x-direction The summation of the forces acting in the x direction would then be: 25 This can be represented as: 26 For the y and z directions respectively we get: 27 28 If all the equations (body forces and surface forces) are combined and divided by dxdydz the conservation of momentum becomes: 29 The momentum equation is a combination of: Gravity force + pressure force + viscous force = density x acceleration (These components are highlighted above). the cylindrical coordinates are represented as: 30 Shear stress is directly proportional to the velocity gradient for Newtonian fluids: 31 𝜏=𝜇 𝜕𝑢 𝜕𝑦 This equation is valid for one dimensional flow but can be displayed in 3 dimensional flow as: 32 When substituting the above equations into Equation 29and Equation 30 The differential momentum equation for Newtonian fluid with constant velocity and viscosity is displayed as: 33 And in cylindrical coordinates as: 34 These are incompressible flow Navier-Stokes equations. For inviscid flow (frictionless flow) in which all the shearing stresses are zero and the normal stresses are replaced by –p. the momentum equation becomes: 35 These equations are known as Euler’s equations of motion and can be represented in vector form as: 36 6.4 Energy conservation The equation for conservation of energy which is valid for a Newtonian fluid under very general conditions of unsteady, compressible, viscous, heat-conducting flow, except that it neglects radiation heat transfer and internal sources of heat that might occur during a chemical or nuclear reaction is shown below: 37 Where Φ is the viscous dissipation function which is shown in its expanded form as follows: 38 7 References Munson, B., 2013. Fundamentals Of Fluid Mechanics. Hoboken, N.J: Wiley. White, F., n.d. Fluid Mechanics. Www-mdp.eng.cam.ac.uk. 2020. Kinematic Similarity. [online] Available at: <http://www mdp.eng.cam.ac.uk/web/library/enginfo/aerothermal_dvd_only/aero/fprops/di mension/node18.html> [Accessed 4 June 2020]. Bansal, R. (1987). A text book of fluid mechanics and hydraulic machines. Delhi: Laxmi Publications. Munson, B. (2013). Fundamentals of fluid mechanics. Hoboken, N.J: Wiley. Saddlespace.org. (2020). PowerSchool Learning : 8th Grade Science : Sec. 2 Buoyancy. [online] Available at: https://www.saddlespace.org/whittakerm/science/cms_page/view/7795375 [Acc essed 25 Feb. 2020]. White, F. (n.d.). Fluid mechanics. 8 References