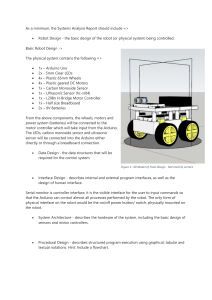
KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL KAWASAKI HEAVY INDUSTRIES, LTD. ROBOT DIVISION Preface Preface This manual is subject to change without prior notice and without our legal responsibility. Kawasaki pursues a policy of continuing improvement in design and specification of the product. The right is therefore reserved to vary this manual without prior notice. This manual is copyrighted and all rights are reserved by Kawasaki. This manual may not in whole or part be reproduced in any form or by any means without prior written permission from Kawasaki. This manual is prepared with the best care but anyway it is impossible to exclude any misinterpretation by the user or any spelling mistakes. In case of doubts or if the robot behavior is different from that reported in this manual please would you get in touch with the nearest Kawasaki or Kawasaki’s agent. Kawasaki cannot anticipate every possible circumstance that might involve a potential hazard. If a procedure work method or operating technique not specifically recommended by Kawasaki is used, you must satisfy yourself that it is safe for you and others. In this case you are completely responsible for eventual damages on human bodies or thing. If you discover physical defects in the manual, Kawasaki will replace the manual at no charge during 90 days period after you purchased the robot. If you do not observe warnings and/or caution to be taken in the manual as described below, it might result in the serious injuries or damages on human bodies or robots. Therefore you must take extreme care to observe these warnings and caution. All rights reserved. Copyright 2001 by KAWASAKI HEAVY INDUSTRIES, LTD. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL i Preface Safety The following symbols are present in all Kawasaki Robot documentation to signify to the user that proper guidelines, as set forth in the text, are designed to provide pertinent information. ! DANGER This danger symbol identifies special warnings or procedures which, if not strictly observed, will result in serious injury or death. ! WARNING This warning symbol identifies special warnings or procedures which, if not strictly observed, could result in serious injury or death. ! CAUTION This caution symbol identifies special instructions or procedures which, if not strictly followed, may result in injuly. IMPORTANT This important symbol identifies special instructions or produces which, if not correctly followed, could result in serious machine damage. NOTE: ii This note symbol identifies supplementary information, or to emphasize a point or procedure, or to give a tip for easier operation. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Preface もくじ CONTENTS I.0. INTRODUCTION ....................................................................................................... I-3 I.1. Robot Controller....................................................................................................... I-3 I.1.1. Robot Controller Design Specifications..........................................................................................I-3 I.1.2. Controller Variations (External) and Manipulator Pairing ..............................................................I-6 I.1.3. C Controller Installation Planning................................................................................................. I-16 1.0. SAFETY .................................................................................................................. 1-3 1.1. INTRODUCTION.................................................................................................... 1-3 1.2. PERSONAL SAFETY ............................................................................................ 1-4 1.2.1. Personnel Safety Categories .................................................................................................... 1-4 1.2.1.1. Personal Safety ...................................................................................................................................1-4 1.2.1.2. Safety During Operation......................................................................................................................1-6 1.2.1.3. Safety During Programming ...............................................................................................................1-7 1.2.1.4. Safety During Inspection and Maintenance .......................................................................................1-8 1.2.2. Safety Features ........................................................................................................................... 1-9 2.0. RIGGING/LIFTING/MOVING INSTRUCTIONS ..................................................... 2-3 2.1. LIFTING C3X, C4X CONTROLLER....................................................................... 2-3 2.2. MOVING C3X, C4X CONTROLLER ON CASTERS............................................. 2-4 2.3. C70 CONTROLLER TRANSPORTATION ............................................................ 2-5 2.4. C80 CONTROLLER TRANSPORTATION ............................................................ 2-6 3.0. INSTALLATION OF ROBOT CONTROLLER ....................................................... 3-3 3.1. POSITIONING THE ROBOT CONTROLLER (C3X, C4X Controller) .............. 3-4 3.2. PERMANENT MOUNTING PROCEDURE (C3X, C4X Controller)................... 3-5 3.3. POSITIONING THE ROBOT CONTROLLER (C70 Controller)........................ 3-6 3.4. POSITIONING THE ROBOT CONTROLLER (C80 Controller)........................ 3-7 4.0. MULTI FUNCTION PANEL CONNECTIONS ........................................................ 4-3 4.1. MULTI FUNCTION PANEL CONNECTIONS ........................................................ 4-3 5.0. WIRING INSTRUCTIONS....................................................................................... 5-3 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL iii Preface 5.1. WIRING INSTRUCTIONS FOR MAINS POWER SUPPLY ............................... 5-3 5.1.1. Connection of Mains Power ......................................................................................................... 5-3 5.1.2. Preparation and Confirmation of Incoming Power...................................................................... 5-9 5.2. WIRING INSTRUCTIONS BETWEEN CONTROLLER AND MECHANICAL UNIT .................................................................................. 5-10 5.2.1.Harness Connections to the Mechanical Unit............................................................................ 5-10 5.2.2. Harness Connection to Controller.............................................................................................. 5-18 5.3. J,U,Z AND F-SERIES SENSOR CABLE CONNECTION (OPTIONAL).......... 5-24 5.3.1. J-Series (Handling Specification)............................................................................................... 5-24 5.3.2. UD100/150 (Handling Specification .......................................................................................... 5-26 5.3.3. ZD-Series..................................................................................................................................... 5-27 5.3.4. F-Series ....................................................................................................................................... 5-28 5.3.5. Limit and Proximity Switch Connection, J, U, Z and F-Series ................................................. 5-30 5.3.6. Sensor Wiring Diagrams ............................................................................................................ 5-32 5.3.7. Solenoid Valve Wiring Diagram (Handling Specification)........................................................ 5-39 A.0. APPENDIX ..............................................................................................................A-1 A.1. CONVERSION TABLES ........................................................................................A-3 A.1.1. Conversion from Fractional Inches to Millimeters ......................................................................A-4 A.1.2. Conversion from Millimeters to Inches........................................................................................A-5 A.1.3. Conversion from Decimal Inches to Millimeters .........................................................................A-6 A.1.4. Conversion from Foot-Pounds to Meter-Kilograms ...................................................................A-7 A.1.5. Conversion of Inch-Pounds to Inch-Ounces...............................................................................A-8 A.1.6. Conversion of Foot-Pounds to Inch-Pounds ..............................................................................A-9 A.1.7. Conversion of Inch-Pounds to Centimeter-Kilograms .............................................................A-10 A.1.8. Conversion of Foot-Pounds to Meter-Kilograms......................................................................A-11 A.1.9. Conversion of Foot-Pounds to Newton-Meters ........................................................................A-12 A.1.10. Conversion of Inch-Pounds to Newton-Meters ......................................................................A-13 A.1.11. Conversion of Inch-Ounces to Newton-Meters ......................................................................A-14 A.2. STANDARD TORQUE TABLES......................................................................... A-15 GLOSSALY ................................................................................................................... G-1 INDEX............................................................................................................................ IN-1 iv KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-1 Introduction I.0. INTRODUCTION .............................................................................................. I-3 I.1. Robot Controller ............................................................................................. I-3 I.1.1. Robot Controller Design Specifications .............................................................................. I-3 I.1.2. Controller Variations (External) and Manipulator Pairing ................................................... I-6 I.1.3. C Controller Installation Planning ..................................................................................... I-16 I-2 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction I.0. INTRODUCTION The C Series Controller Installation manual is designed to assist the user whose primary responsibility is the initial installation, placement, and basic electrical wiring connection of the robot controller. This manual provides specific information on safety, and installation procedures. It is not designated to be a programming or operations manual, not is it designated to provide mechanical or electrical troubleshooting procedures. I.1. Robot Controller The Kawasaki robot controller consists of printed circuit boards, Multi Function Panel and servo amplifiers. I.1.1. Robot Controller Design Specifications Control System: 32 bit RISC mainCPU 32 bit RISC CPU for Multi Function Panel 32 bit RISC servo CPU controller (one per 3 axes) Software controlled AC servo drive system using PWM (pulse width modulation) circuitry. Number of Axes: 6 standard; 7th optional Motion Control: Teach mode- Joint Base Tool Repeat mode- Joint move Linear move Circular move (optional) Memory: CMOS RAM Memory Capacity: Standard - 1024 KB (approx. 9,000 steps) Optional - 4096 KB (approx. 36,000 steps) Speed: 10 levels of speed for block step programs (adjustable between 0% - 100%) Data Editing: Step insertion and deletion, and rewriting of auxiliary and positional data. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-3 Introduction I-4 Software Features: Continuous path motion control - CP ON/OFF Time delays Coordinate modification Process control programs (3) Peripheral equipment control Interrupt signal control Error interrupt control Input of real, string, and integer variables Local variables Subroutine calls with arguments (maximum stack = 20) Two arm control Program weld schedules Servo shutdown timer Auto Start function I/O Signals: 32 inputs/32 outputs (C3X, C4X; 128, C70, C80; 96 maximum) including dedicated signals RI/O (option) Control Net (option) Dedicated Signals: Outputs - Motor Power ON Error Occurrence Automatic CYCLE_START Teach Mode HOME1 HOME2 Power ON RGSO Ext. Program Select (RPS) Enabled Inputs - External Motor Power ON External Error Reset External Cycle Start External Program Select Start (JUMP) JUMP_ON JUMP_OFF JUMP_ST External Program Select Start (RPS) RPS_ON RPS_ST Number of RPS Code Signal First Signal Number of RPS Code Program Reset Ext. Hold (EXT_IT) Ext. Condition Wait (EXT_WAIT) Ext. SLOW REPEAT MODE KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction Error Messages: Error code messages, self-diagnosis, error logging, operation logging Multi function panel: Dead man safety switches VGA color LCD Touch panel Teach-lock function Emergency stop switch Pen for touch panel PC card insertion section Supplemental Data Storage: PC card Floppy disk drive (option) Personal computer (option) Power Requirements: C30/31/32/33 C40/41/42/43 C70/C80 400/440/460/480/515/575 VAC 380/400/415/440/460/480 VAC 200-240 VAC Dimensions: C30/31/32/33 C40/41/42/43 C70 C80 W × D × H, 550 mm × 500 mm × 1150 mm W × D × H, 550 mm × 500 mm × 1150 mm W × D × H, 270 mm × 500 mm × 470 mm W × D × H, 470 mm × 350 mm × 850 mm Mass: C30/31/32/33 C40/41/42/43 C70 C80 250 kg 250 kg 30 kg 60 kg KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-5 Introduction I.1.2. Controller Variations (External) and Manipulator Pairing C-series controllers are grouped in nine different types. The various types are paired with specific mechanical units. The following list indicates the correct pairing of controller and manipulator. C30 A✼01 A✼02, A✼20 A✼12, A✼21 A✼13, A✼22 A✼14, A✼23 JS005, JC005, JW005 JS010, FS006N/L, FS010C/E/N FA06E/N/L FS010L, FS020C/N, FP020N FA020N C31 A✼01, A✼20 A✼02, A✼21 JS030/040, FS030N/L, FS045C/N FA030L C32 A✼01, A✼03 A✼02 A✼05 UX100/120/150, UT100/120/150 UX200/300, UT200 ZX100-300, ZT100-300 C33 A✼01 A✼02 UD100-150 ZD130 C40 A✼01 A✼02, A✼20 A✼12, A✼21 A✼13, A✼22 A✼14, A✼23 JS005, JC005, JW005 JS010, FS006N/L, FS010C/E/N FA006E/N/L FS010L, FS020C/N, FP020N FA020N C41 A✼01, A✼20 JS030/040, FS030N/L, FS045C/N C42 A✼01 A✼02 A✼03 UX100/120/150, UT100/120/150 UX200/300 ZX130-300, ZT130-300 C43 A✼01 A✼02 UD100/150 ZD130 C70 A✼01 A✼02 FS02/03, FC02 FS02/03, FC02 Wall mounting specification C80 A✼01, A✼02 F006N/L, FS010C/E/N FA006E/N/L, F010N FC006N [ NOTE ] There is two kinds of F-Series Robots types (A001, B002). In this manual, we describes it in parallel in a necessary part. I-6 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction Mains Power Inlet Multi Function Panel Operation Panel Disconnect Switch PC Connector Power Lamp Multi Function Panel Connector Hour Meter Door Lock 550 Figure C4X Controller Frond and Left Side View KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-7 1150 Introduction 110 Exhaust Port 500 Figure C4X Controller Rear and Right Side View I-8 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction Multi Function Panel Disconnect Switch Operation Panel Power Lamp Multi Function Panel Hour Meter Door Lock Figure C3X Controller Front and Left Side View KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-9 Introduction Exhaust Port Figure C3X Controller Rear and Right Side View I-10 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction Figure C70 Controller Front and Left Side View KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-11 Introduction Exhaust Port Figure C70 Controller Rear and Right Side View I-12 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction 350 50 43.5 470 Disconnect Switch Multi Function Panel 850 User’s Operation Panel Figure C80 Controller Front and Left Side View KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-13 Introduction Exhaus Figure C80 Controller Rear and Right Side View I-14 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Introduction “Emergency-Stop” Switch “TEACH LOCK” Switch Deadman Switch Deadman Switch Liquid Crystal Display Pen for Touch Panel PC Card Port Contrast Adjustment Volume Figure Multi Function Panel (Type 1) “TEACH LOCK” Switch “Emergency-Stop” Switch PC Card Port Liquid Crystal Display Deadman Switch Deadman Switch Figure Multi Function Panel (Type 2) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL I-15 Introduction I.1.3. C Controller Installation Planning Safety Uncrating and Unpacking Procedures Rigging and Lifting Instructions Installation of Robot Controller Connection of Robot Wiring Harness Wiring Instructions for Power Supplies Electrical Interface Connections NO Available ? Install Jumpers on Interface of Connector YES Connect Wiring Interface Refer to Manual Mechanical Maintenance Manual I-16 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 1-1 Safety 1.0. SAFETY ........................................................................................................... 1-3 1.1. INTRODUCTION .............................................................................................. 1-3 1.2. PERSONAL SAFETY....................................................................................... 1-4 1.2.1. Personnel Safety Categories .............................................................................................. 1-4 1.2.1.1. Personal Safety........................................................................................................................ 1-4 1.2.1.2. Safety During Operation .......................................................................................................... 1-6 1.2.1.3. Safety During Programming .................................................................................................... 1-7 1.2.1.4. Safety During Inspection and Maintenance ............................................................................. 1-8 1.2.2. Safety Features ................................................................................................................... 1-9 1-2 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Safety 1.0. SAFETY 1.1. INTRODUCTION Safety is an important consideration in the use of automated and robotic equipment in the industrial environment. All operators, maintenance personnel, and programmers must be aware of all automated equipment, peripheral and robotic equipment that occupies the work cell, and their associated operational and maintenance procedures. For this reason it is recommended that all personnel who operate, maintain, and program Kawasaki robots, attend a Kawasaki approved training course that would be pertinent to each employee’s specific job responsibilities. The following safety sections in this text are designed to support and augment existing safety guidelines that may be in use in your plant, and/or are provided by municipal, state, or country, but are NOT designed to supplant or supersede any existing rules, regulations, or guidelines that may be in use. Because safety is the primary responsibility of the user, owner, and/or employer, Kawasaki recommends that specific safety guidelines and recommendations be adopted from groups or individuals that are professionals in safety design and implementation. All safety related issues and descriptions, either presented in written or oral from any representative of Kawasaki, are intended to provide general safety precautions and procedures and, therefore, are not intended to provide all safety measures necessary for the protection of all personnel in the work environment. Kawasaki robots are considered safe for use in industrial environments when all safety guidelines are adhered to. Adherence to the safety guidelines for safe robot operation and the protection of personnel and equipment is the responsibility of the end user. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 1-3 Safety 1.2. PERSONAL SAFETY 1.2.1. Personnel Safety Categories Personnel safety can be described in one of four categories: z Personal safety z Safety during operation z Safety during programming z Safety during inspection and maintenance A description of each follows in this section 1.2.1.1. Personal Safety Safety procedures must be an integral part of operational procedures for the operator, programmer, and maintenance person. These procedures must be followed explicitly and on a regular basis. If consistent safety procedures are followed on a daily basis, they should become a regular part of everyday operational procedures which are designed to protect the user. Some guidelines are presented in brief in the following section: z Before operating or maintaining the robot or robot controller, be sure you fully understand and comprehend all maintenance, operating and programming procedures, and ensure that all safety related precautions are taken and complied with before these procedures are attempted. z Avoid wearing loose clothing, scarves, wrist watches, rings, and jewelry when working on the controller and robot. It is also recommended that if ties must be worn in your shop environment, that they be the clip-on variety, rather than tied ties. z Always wear safety glasses or goggles and approved safety shoes for your shop conditions. Follow all applicable local, state, country, and plant safety specifications and procedures. z Know the entire work cell or area that the robot occupies. z Be aware of the entire work envelope of the robot and any peripheral devices. z Locate all emergency stop buttons or switches. z Avoid trap points in which personnel could become trapped between a moving device and any stationary devices. z Personnel should never enter the work envelope during automatic operations. z Ensure that all personnel are clear of the work envelope before initiating any motion commands for the robot. z Before initiating any motion commands, KNOW beforehand how the robot will perform when that command is given. z Be sure that the entire work area is free of any debris, tools, fixturing, lubricants, and cleaning equipment before operation of the robot is attempted. 1-4 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Safety z If any personnel observe unsafe working conditions, report them immediately to your supervisor or plant safety coordinator. z All personnel should identify by name and function all switches, indicators, and control signals that could initiate robot motion. z Never defeat, render useless jumper out, or bypass any safety related device, whether mechanical or electrical in design. z All safety devices approved for use in your plant must be properly installed and maintained to ensure personnel safety. z NEVER attempt to stop or brake the robot during operation with your body or person. Utilize Emergency-Stops only to stop robot motion. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 1-5 Safety 1.2.1.2. Safety During Operation z During operation of the robot, identify the maximum reach of the robot in all directions, which is referred to as the work envelope. z Always keep your work area clean and free of any debris which includes, but is not limited to, oil, water, tool, fixturing, electronic test equipment, etc. z During operations that involve the Multi Function Panel, the only person allowed in the work envelope is the teacher, or the person operating the Multi Function Panel. The Multi Function Panel has provisions to protect the operator. These safety provisions include an Emergency-Stop and deadman switch. 1-6 z Never block the operator’s path retreat. z During the teach operation of the robot always have a path of retreat planned. z AVOID pinch points. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Safety 1.2.1.3. Safety During Programming z During operation of the robot, be sure you are able to identify the maximum reach of the robot in all directions, which is referred to as the work envelope. z During teach operations the only person allowed in the work envelope is the teacher, or the person operating the Multi Function Panel. The Multi Function Panel has provisions to protect the operator including Emergency-Stop and deadman switch. z AVOID pinch points. z During point-to-point playback operations, be aware that the robot is only cognizant of its present location and the next point it is requested to move to. It will execute this move with total disregard to what may lie in its path when the move is executed. z Playback accuracy and speed can affect the geometry of the path coordinates. Therefore, when changing accuracy or speed, always test run the program at a slow speed, or point-to-point mode before attempting the continuous path operation in the repeat mode. z ALWAYS test run a new path program at a reduced speed, or in point-to-point mode prior to attempting a high-speed playback operation in the repeat mode. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 1-7 Safety 1.2.1.4. Safety During Inspection and Maintenance Before entering the work envelope to perform either inspection or maintenance procedures, turn off three-phase power on the disconnect and tag, and lock-out the disconnect switch. ! WARNING The input side (top) of the controller disconnect may still be live when the controller disconnect is turned OFF. If work is to be performed at the controller disconnect switch, turn OFF the three phase power at the source, and tag and lock-out the source disconnect. z When removing an axis motor, be aware that the axis will fall if left unsupported. The brake assembly is in the servo drive motor, therefore, the axis of the robot will be unsupported if removed. z When using the axis brake release switches in the controller, be aware that the axis may fall if left unsupported. z Before working on pneumatic or high pressure water supplies, turn off supply pressure and purge all lines to remove any residual pressure. z Assign only qualified personnel to perform all maintenance procedures. z Consult al available documentation before attempting any repair or service procedures. z Use only replacement parts approved by Kawasaki. z Before attempting to adjust or repair a device in the robot controller that may have yellow interlock control circuit wires attached, locate the source of the power and remove it by disconnecting the appropriate disconnect at its source. z During inspection and maintenance procedures, if your installation is equipped with safety fences and safety plugs, remove and hold the safety plug while performing these operations In addition, the safety procedures outlined above should be adhered to. 1-8 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Safety 1.2.2.Safety Features To safeguard the user, the Kawasaki robot system is equipped with many safety features. Some of these safety items include: z All Emergency-Stops are hardwired. z The Multi Function Panel, and operation panel are all equipped with red mushroom Emergency-Stop push buttons. z Robot velocities are constantly monitored by software. Should an over-velocity condition be detected, the robot will fault in a velocity error condition. z Teach velocities and check mode velocities are limited to a maximum of 250 mm/sec. z All robot axes have software limits. z All robot axes are monitored by the robot controller for velocity and deviation errors. z All robot axes are equipped with 24 VDC electromechanical brakes. Should the robot lose line power, the robot arm will not drop because the brakes are engaged when power is off at the robot controller. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 1-9 Safety ✎ 1-10 MEMO KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 2-1 Rigging/Lifting/Moving Instructions 2.0. RIGGING/LIFTING/MOVING INSTRUCTIONS................................................ 2-3 2.1. LIFTING C3X, C4X CONTROLLER................................................................. 2-3 2.2. MOVING C3X, C4X CONTROLLER ON CASTERS ........................................ 2-4 2.3. C70 CONTROLLER TRANSPORTATION ....................................................... 2-5 2.4. C80 CONTROLLER TRANSPORTATION ....................................................... 2-6 2-2 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Rigging/Lifting/Moving Instructions 2.0. RIGGING/LIFTING/MOVING INSTRUCTIONS 2.1. LIFTING C3X, C4X CONTROLLER z The equipment used to lift the controller must have a minimum capacity of 250 kg. or 551.25 lb. z The lifting sling is attached to the two eye-bolts on the top of the controller. Lifting Sling Eye-bolts Figure Lifting Controller KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 2-3 Rigging/Lifting/Moving Instructions 2.2. MOVING C3X, C4X CONTROLLER ON CASTERS z Ensure pathway is free of hazards. z Release brakes on two forward casters (lower front controller frame). z Move controller with all casters installed and contacting solid flooring. z Avoid movement over inclines or rough surfaces z Lock brakes on two forward casters when movement is complete. ! CAUTION Inclines greater than 15 degrees forward or rearward will cause controller to fall over. Inclines greater than 10 degrees to the side will cause controller to fall over. 2-4 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Rigging/Lifting/Moving Instructions 2.3. C70 CONTROLLER TRANSPORTATION The mass of the controller is 30kg. Do the transportation for safety with two persons or auxiliary tools (crane etc.) z Transportation with two persons Figure Transportation with two persons z Lifts up by the crane Figure Lifts up by the crane KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 2-5 Rigging/Lifting/Moving Instructions 2.4. C80 CONTROLLER TRANSPORTATION The mass of the controller is 60kg. Do the transportation for safety with two persons or auxiliary tools (crane etc.) z Transportation with two persons Figure Transportation with two persons z Lifts up by the crane Figure Lifts up by the crane 2-6 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 3-1 Installation of Robot Controller 3.0. INSTALLATION OF ROBOT CONTROLLER.................................................. 3-3 3.1. POSITIONING THE ROBOT CONTROLLER (C3X, C4X Controller) .......... 3-4 3.2. PERMANENT MOUNTING PROCEDURE (C3X, C4X Controller)............... 3-5 3.3. POSITIONING THE ROBOT CONTROLLER (C70 Controller).................... 3-6 3.4. POSITIONING THE ROBOT CONTROLLER (C80 Controller).................... 3-7 3-2 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Installation of Robot Controller 3.0. INSTALLATION OF ROBOT CONTROLLER Prior to bolting down the robot controller and robot to the base plate, ensure that the manufacturer’s number (numeric digits) on the mechanical unit and the serial number on the robot controller match, as illustrated in figure below, Robot Controller and Robot Manufacturer’s Data Plates. This is very important because the factory performs precision zeroing on each robot it manufactures and therefore, it is imperative that the corresponding robot controller and its mechanical unit are matched as a pair. Robot Controller Manufacture’s Data Plate These two Serial Numbers must match. Robot Mechanical Unit Manufacturer’s Data Plate Figure Robot Controller and Robot Manufacture’s Data Plates KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 3-3 Installation of Robot Controller 3.1. POSITIONING THE ROBOT CONTROLLER (C3X, C4X Controller) When positioning the robot controller, the installer must ensure that the robot wire harness cables are laying flat, are not kinked or twisted, and are protected from debris and water, preferably in a wire tray or conduit as local codes specify. Placement of the controller is also important for controller cooling. The exhaust ports are located on the back of the controller with the air inlets on the bottom. When installing the controller, provide a minimum of 200 millimeters between the controller’s back and right side and any wall. Also provide a minimum of 100 millimeters from its left side and any wall. Once the robot controller has been positioned, it can be permanently fixed using mounting bolts for attachment to anchor fixtures. 200mm or more 100mm or more 100mm or more Figure Installation Wall Clearance (C3X,C4X Controller) 3-4 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Installation of Robot Controller 3.2. PERMANENT MOUNTING PROCEDURE (C3X, C4X Controller) Once the robot controller has been positioned, it can be permanently fixed to the floor surface. Two permanently fixed nuts are located on the lower right side in the controller cabinet. These nuts accept M12 bolts. See figure below for location of mounting bolts holes. Controller left side, lower Controller right side, lower Figure Permanent Mounting (C3X, C4X Controller) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 3-5 Installation of Robot Controller 3.3. POSITIONING THE ROBOT CONTROLLER (C70 Controller) When positioning the robot controller, the installer must ensure that the robot wire harness cables are laying flat, are not kinked or twisted, and are protected from debris and water, preferably in a wire tray or conduit as local codes specify. Placement of the controller is also important for controller cooling. The exhaust ports are located on the back of the controller with the air inlets. When installing the controller, provide a minimum of 200 millimeters between the controller’s back side and any wall. Also provide a minimum of 100 millimeters from its left side and right side and any wall. 100mm or more 100mm or more 100mm or more 100mm or more Figure Installation Wall Clearance (C70 Controller) 3-6 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Installation of Robot Controller 3.4. POSITIONING THE ROBOT CONTROLLER (C80 Controller) When positioning the robot controller, the installer must ensure that the robot wire harness cables are laying flat, are not kinked or twisted, and are protected from debris and water, preferably in a wire tray or conduit as local codes specify. Placement of the controller is also important for controller cooling. The exhaust ports are located on the back of the controller with the air inlets. When installing the controller, provide a minimum of 200 millimeters between the controller’s back side and any wall. Also provide a minimum of 200 millimeters from its left side and any wall. Figure Installation Wall Clearance (C80 Controller) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 3-7 Installation of Robot Controller ✎ 3-8 MEMO KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 4-1 Multi Function Panel Connections 4.0. MULTI FUNCTION PANEL CONNECTIONS................................................... 4-3 4.1. MULTI FUNCTION PANEL CONNECTIONS................................................... 4-3 4-2 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Multi Function Panel Connections 4.0. MULTI FUNCTION PANEL CONNECTIONS 4.1. MULTI FUNCTION PANEL CONNECTIONS Locate and remove Multi Function Panel from packaging. Insert Multi Function Panel harness connector into plug. The Multi Function Panel is connected to the receptacle located on the operation panel of the robot controller. Ensure outer lock ring is rotated fully clockwise and in the locked position prior to operation of Multi Function Panel. Multi Function Panel (Type 1) Multi Function Panel (Type 1) Multi Function Panel Connector Figure Multi Function Panel Connections (C3X, C4X Controller) Multi Function Panel Connector Figure Multi Function Panel Connections (C70 Controller) Multi Function Panel (Type 2) (Option) Multi Function Panel Connector Figure Multi Function Panel Connections (C80 Controller) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 4-3 ✎ 4-4 MEMO KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-1 Wiring Instructions 5.0. WIRING INSTRUCTIONS ................................................................................ 5-3 5.1. WIRING INSTRUCTIONS FOR MAINS POWER SUPPLY.............................. 5-3 5.1.1. Connection of Mains Power ................................................................................................ 5-3 5.1.2. Preparation and Confirmation of Incoming Power ............................................................. 5-9 5.2. WIRING INSTRUCTIONS BETWEEN CONTROLLER AND MECHANICAL UNIT.............................................................................. 5-10 5.2.1.Harness Connections to the Mechanical Unit ................................................................... 5-10 5.2.2. Harness Connection to Controller..................................................................................... 5-18 5.3. J,U,Z AND F-SERIES SENSOR CABLE CONNECTION (OPTIONAL)......... 5-24 5.3.1. J-Series (Handling Specification)...................................................................................... 5-24 5.3.2. UD100/150 (Handling Specification.................................................................................. 5-26 5.3.3. ZD-Series .......................................................................................................................... 5-27 5.3.4. F-Series ............................................................................................................................. 5-28 5.3.5. Limit and Proximity Switch Connection, J, U, Z and F-Series.......................................... 5-30 5.3.6. Sensor Wiring Diagrams................................................................................................... 5-32 5.3.7. Solenoid Valve Wiring Diagram (Handling Specification) ................................................ 5-39 5-2 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 5.0. WIRING INSTRUCTIONS 5.1. WIRING INSTRUCTIONS FOR MAINS POWER SUPPLY Refer to table below for mains power supply wire specifications. Table Wire Specifications (Primary Power) Mode Recommended Wire size C30, C40 4 mm or more (#12AWG) C31/32/33, C41/42/43 6 mm or more (#10AWG) C70 1.5 mm or more (#16AWG) C80 3.5 mm or more (#12AWG) 2 2 2 2 5.1.1. Connection of Mains Power Circuit Breaker Specifications C30/31/32/33 C40 C41/42/43 C70/C80 Amps: 15 10 16 10 Voltage: Frequency: 600 VAC 60Hz 600 VAC 50〜60 Hz 600 VAC 50〜60 Hz 250 VAC 50〜60 Hz Power Supply Specifications Voltage: C30/31/32/33 3-Phase 400/440/460/480/515/575 VAC±10% C40/41/42/43 3-Phase 380/400/415/440/460/480 VAC±10% C70/C80 Signal-Phase 200∼240 VAC±10% Frequency: 50-60 Hz KVA Rating: C30,C40: 5 KVA C31/32/33,C41/42/43: 10.5 KVA C70: 1.5 KVA C80: 3 KVA Ground: Less than 100 ohms, separated from welding power supply ground KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-3 Wiring Instructions ● C4X CONTROLLER The 3-phase mains power should be connected to the internal circuit breaker (F1) at the left hand side of the robot controller. This can be accomplished by the following procedure: 1. Ensure that the line side circuit breaker is in the OFF(O) position. 2. Ensure that the internal circuit breaker(F1) and disconnect switch(Q1) are in the OFF(O) position. 3. Open the controller’s door. 4. Take off the protective cover (remove the 4 screws). 5. The incoming power wire is routed into the controller. 6. Connect the individual wires to the upper terminals of the circuit breaker(F1). The circuit breaker is not phase sensitive and power wires may be connected to any power terminal. 7. Connect the ground wire to the grounding terminal(PE). Ensure all lugs are properly. Figure C4X Connection of Mains Power 5-4 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions ● C3X CONTROLLER The 3-phase mains power should be connected to the internal circuit breaker (F1) at the left hand side of the robot controller. This can be accomplished by the following procedure: 1. Ensure that the line side circuit breaker is in the OFF(O) position. 2. Ensure that the internal circuit breaker(F1) is in the OFF(O) position. 3. Open the controller’s door. 4. The incoming power wire is routed into the controller. 5. Connect the individual wires to the upper terminals of the circuit breaker(F1). The circuit breaker is not phase sensitive and power wires may be connected to any power terminal. 6. Connect the ground wire to the grounding terminal(PE). Ensure all lugs are properly. Figure C3X Connection of Mains Power KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-5 Wiring Instructions ● C70 CONTROLLER The single-phase mains power should be connected to the internal noise filter at the left hand side of the robot controller. This can be accomplished by the following procedure: ! CAUTION C70 Controller’s main switch is type which cannot lockout. Therefore, install the disconnecting switch which can lockout in the power supply line to the controller so that the power supply is not improvidently turned on when maintenance. 1. Ensure that the line side circuit breaker is in the OFF position. 2. Ensure that the internal circuit breaker is the OFF position. 3. Remove the controller top and side cover. (Remove 4 screws) 4. The incoming power wire is routed into the controller through the Cable Intaking Port, and fix the incoming power wire to the cable fixed plate using cable clamp. Figure C70 Connection of Mains Power 5-6 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 5. Crimp Insulated eyelet terminals to the end of the incoming power wire. Noise filter screw size :M4 Grounding terminal screw size :M4 6. Connect the incoming power wire to the terminal on the top side of the noise filter and Grounding terminal. ! WARNING Tighten the terminal enough (3.43Nm). It is liable the electric shock accident, malfunction of robot and breakdown of electrical system when using it while having loosened. 7. Reinstall the noise filter terminal cover. ! WARNING Install the cover of the noise filter terminal without fail after ending wiring. It is liable to get an electric shock touching the terminal when you forgets to install the cover. 8. Reinstall the controller cover. Figure C70 Connection of Mains Power (Continued) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-7 Wiring Instructions ● C80 CONTROLLER The Singule-phase mains power should be connected to the internal circuit breaker (F1) at the left hand side of the robot controller. This can be accomplished by the following procedure: 1. Ensure that the line side circuit breaker is in the OFF(O) position. 2. Ensure that the internal circuit breaker(F1) is in the OFF(O) position. 3. Open the controller’s door. 4. The incoming power wire is routed into the controller. 5. Connect the individual wires to the upper terminals of the circuit breaker(F1). The circuit breaker is not phase sensitive and power wires may be connected to any power terminal. 6. Connect the ground wire to the grounding terminal(PE). Ensure all lugs are properly. Figure C80 Connection of Mains Power 5-8 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 5.1.2. Preparation and Confirmation of Incoming Power Prior to setting the correct taps on the servo transformer, the incoming line voltage must be measured. The two procedures that are described below are acceptable, however, Procedure One is the preferred method. Procedure One 1. Obtain a voltage strip chart recorder. Monitor the incoming 3-phase voltage that will supply the robot controller breaker (C3X, C4X Controller). Or monitor the incoming Single-phase voltage that will supply the robot controller breaker (C70, C80 Controller). Ensure the breaker on the main disconnect is in the OFF position. 2. Monitor this voltage for one to two days. 3. Record the highest voltage reading and the lowest voltage reading. 4. Average the highest and lowest voltage readings, and record this average value. 5. Check the existing voltage taps on the servo transformer and note the value. 6. If the value of the existing voltage taps on the servo transformer is the value as recorded in step number 4, no change of the taps is necessary. If the servo taps do not match the value recorded in step number 4, then the wire location will need to be changed on the taps. Refer to the label located on the transformer for correct wire connection. Procedure Two Procedure Two is similar to Procedure One, however, in step 1, substitute a digital volt meter in place of the strip chart recorder. All voltage measurements should be taken with the robot main disconnect in the OFF position. Replace step 2 in Procedure One with: Measure the building’s incoming voltage five different times during the controller’s operational day. Two voltage checks should be made in the morning (at different times), one at noon, and two in the afternoon (at different times). These voltage measurements should then be averaged together, and an average voltage found. The voltage taps should then be set accordingly on the servo transformer. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-9 Wiring Instructions 5.2. WIRING INSTRUCTIONS BETWEEN CONTROLLER AND MECHANICAL UNIT 5.2.1. Harness Connections to the Mechanical Unit ! CAUTION Do not take the locking lever with fingers, when you release the connector. There is a possibility you catch fingers in the lever. Push the locking lever with the finger cushion. Wire harness connectors are identified with labels. Push connectors X3A, X4A, X5A into sockets firmaly. Look each connector in socket using connector’s locking lever. Connection of Js5, JA5, JC5, JW5, Js6, Js10, JA10, JM10 Signal harness Motor harness Figure Mechanical Unit Harness Connections 5-10 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Connection of U-series Signal harness Major axis motor harness Minor axis motor harness Figure Mechanical Unit Harness Connections (Continued) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-11 Wiring Instructions Connection of Z Series Signal harness Major axis motor harness Minor axis motor harness Figure Mechanical Unit Harness Connections (Continued) 5-12 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Connection of Js30/40 Signal harness Major axis motor harness Minor axis motor harness Figure Mechanical Unit Harness Connections (Continued) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-13 Wiring Instructions Connection of FS06N/L, FC06N, FW06N, FA06N/L/E, FS10C/N/E, FA10N (A001) (B002) X4A Motor harness X3A Signal harness Motor harness Signal harness Figure Mechanical Unit Harness Connections (Continued) 5-14 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Connection of FS10L, FS20C/N, FP20N, FA20N (A001) (B002) X4A X3A Signal harness Motor harness Motor harness Signal harness Figure Mechanical Unit Harness Connections (Continued) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-15 Wiring Instructions Connection of FS30N/L, FS45C/N, FS10X (A001) (B002) X3A X4A X5A Signal harness Major axis motor harness Minor axis motor harness Minor axis motor harness Major axis motor harness Signal harness Figure Mechanical Unit Harness Connections (Continued) 5-16 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Connection of FS02/03, FC02 Locking lever Motor harness Signal harness Figure Mechanical Unit Harness Connections (Continued) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-17 Wiring Instructions 5.2.2. Harness Connection to Controller ● C3X, C4X CONTROLLER 1. Wire harness are routed though the bottom of the controller. 2. Wire harness connectors are identified with labels. Push connectors X3, X4(,X5) into sockets firmly. Lock each connector in socket using connector’s locking lever. Motor harness Signal harness Figure C30, C40 Controller Harness Connections 5-18 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Minor axis motor harness Major axis motor harness Signal harness Figure C31/32/33,C41/42/43 Controller Harness Connections KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-19 Wiring Instructions ● C70 CONTROLLER This can be accomplished by the following procedure: 1. Remove the controller cover (Remove the 4 screws.). 2. The signal and motor harness are routed into the controller through the intaking port, and fix them to the cable fixed plate using cable clamp. Cable Intaking Port Cover Cable Fixed Plate Shield Fix the shield part by cable clamp Cable Clamp Figure C70 Controller Harness Connections 5-20 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 3. Connect the motor and signal harness to the controller. Secure the connector 1GB-CN2 and 1GB-CN6 using locking screws. Secure the connector X001, X101, X102 and X201 using locking latch. Signal harness Motor harness (1GB-CN2, 1GB-CN6, X201) (X001, X101,X102) Figure C70 Controller Harness Connections (Continued) 4. Reinstall the controller cover. ! CAUTION ~ Fix each connector surely using locking latch or locking screws. There is a possibility of the unexpected robot motion. ~ Connect the grounding wire to the terminal without fail. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-21 Wiring Instructions ● C80 CONTROLLER This can be accomplished by the following procedure: 1. Remove the cover provided on the controller left side lower section. (Remove the each 4 screws.). 2. The signal and motor harness are routed into the controller through the intaking port, and fix them with screvs. Figure C80 Controller Harness Connections 5-22 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 3. Connect the motor and signal harness to the controller. Secure the connector 1GB-CN2 and 1GB-CN6 using locking screws. Secure the connector X001, XM1, XM2 and X201 using locking latch. Figure C80 Controller Harness Connections (Continued) KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-23 Wiring Instructions 5.3. J,U,Z AND F-SERIES SENSOR CABLE CONNECTION (OPTIONAL) The J, U, Z and F-Series can be supplied with an optional sensor cable that connects with limit or proximity switches. The sensor cable option allows the use of four input signals. These signals can be used with limit switches, proximity switches, or both. The sensor cable wires are terminated with connectors for easy termination. The power supply (24VDC) for this sensor uses the power supply built-in the controller; supply from the outside is unnecessary. Select the appropriate proximity sensor, etc., so the current power capacity of the built-in power supply is not exceed. Current power capacity is 0.2A or less. SIG1-4 are approximately 10mA each. 5.3.1. J-Series (Handling Specification) Js5/JC5/Js10: Internal wiring of the arm for sensor cable routing is illustrated in figure 5-15. The sensor cable for Js5/JC5/Js10 is located in the fifth axis housing. The Js30 and Js40 sensor cable is located in the third axis housing, see figure below. Js5/JC5 Js10 Figure Js5/JC5/Js10 Sensor Cable and Faston Connector Location 5-24 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Js30/Js40 Faston terminals for sensor Opening for Sensor cable Sensor cable (option) approx. 1.8 M. Cable connector specified by customer’s application Figure Js30 and Js40 Sensor Cable and fasten Connector Location [ NOTE ] To prevent electrical short, insulate the ends of all sensor wires not being used. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-25 Wiring Instructions 5.3.2. UD100/150 (Handling Specification Internal wiring of the arm for sensor cable routing is illustrated in figure below. The connector for sensor is located on the inside surface of the access cover. UD100/150 Cable connector specified by customer’s application Opening for sensor cable Sensor cable Connector for sensor Figure UD100/150 Sensor Cable Routing [ NOTE ] To prevent electrical short, insulate the ends of all sensor wires not being used. 5-26 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 5.3.3. ZD-Series Internal wiring of the arm for sensor cable routing is illustrated in figure below. The connector for sensor is located on the inside surface of the access cover. ZD-Series Wrist section (front) Cable connector specified by customer’s application Wrist section (side) Sensor cable Connector for sensor Figure ZD-Series Sensor Cable Routing [ NOTE ] To prevent electrical short, insulate the ends of all sensor wires not being used. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-27 Wiring Instructions 5.3.4. F-Series F-Series (A001) Faston terminal for sensor Cable connector specified by customer’s application Opening for sensor cable Sensor cable (option) approx. 1.5 M. (B002) Connector for sensor Cable connector specified by customer’s application Opening for sensor cable Sensor cable (option) approx. 1.5 M. Figure F-Series Sensor Cable Routing 5-28 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions Js02/03, FC02 Cable connector specified by customer’s application Sensor cable (option) Faston terminal for sensor Figure FS02/03 and FC02 Sensor Cable Routing KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-29 Wiring Instructions 5.3.5. Limit and Proximity Switch Connection, J, U, Z and F-Series See figure below for proper connections when connecting limit and proximity switches. The following figure illustrates connections for single limit switches, proximity switches or the use of both. When you connect the proximity switch: When you connect the limit switch: Figure Connecting Diagram for Limit and Proximity Switches 5-30 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions When the sensor cable option is used, four of the general purpose inputs must be allocated to the sensor input signals 1-4. The inputs that are allocated to the sensor option are Inputs 13-16. It is important to note that once the inputs are allocated to the sensor option, they cannot be used as general purpose inputs. The following table indicates the corresponding general purpose inputs and the sensor signal inputs. Table Sensor Cable Input Signals External signal Internal signal name Sensor signal 1(SIG1)...................................IN13 Sensor signal 2(SIG2)...................................IN14 Sensor signal 3(SIG3)...................................IN15 Sensor signal 4(SIG4)...................................IN16 The sensor signals and general purpose signals are configured with jumper 5 (J5) on the 1FR/1GW or 1HW board, located in the controller. [ NOTE ] The selection of Use/Not Used is made by one set of IN13-16 which consists of a four point unit. Configure jumper 5 as shown in figure below. For example, avoid settings where 1∼3 of J5 is made A-B and/or 4∼5 is mode B-C. When selecting Use/Not Used, all jumpers must be set to Use or all jumpers set to Not Used. Not Used Used 1FR/1GW board 1HW board Figure 1FR/1GW/1HW Board Jumper Configuration for Sensor Cable Usage KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-31 Wiring Instructions 5.3.6. Sensor Wiring Diagrams The following figures (on 5-32∼5-38 pages), show sensor wiring diagrams for J, U, Z and F-series mechanical units (handling specification). The sensor wires cannot be used for JW5 mechanical units. Js5,JC5,JW5,Js10,Js30/40,F-Series (A001): Controller Manipulator 1FR/1GW 1HW Figure Js5, JC5, Js10, Js30/40, F-Series(A001) Sensor Wiring Diagram 5-32 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions F-Series(B002) : Controller Manipulator 1FR/1GW 1HW Figure F-Series (B002) Sensor Wiring Diagram KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-33 Wiring Instructions U-Series : Controller Manipulator 1FR/1GW 1HW Figure U-Series Sensor Wiring Diagram 5-34 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions UD100/150 : Controller Robot 1FR/1GW 1HW Figure UD100/150 Sensor Wiring Diagram [ NOTE ] The cable color means the following. (1) “Blue(White)” is a white blue line with the opponent of the twist pair. (2) “Yellow, Brown” is both lines of a yellow and brown twist pair. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-35 Wiring Instructions ZX, ZT Series : Manipulator Controller 1FR/1GW 1HW Figure ZX, ZT Series Sensor Wiring Diagram [ NOTE ] The cable color means the following. (1) “Blue(White)” is a white blue line with the opponent of the twist pair. (2) “Yellow, Brown” is both lines of a yellow and brown twist pair. 5-36 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions ZD Series : Munipulator Controller 1FR/1GW 1HW Figure ZD Series Sensor Wiring Diagram [ NOTE ] The cable color means the following. (1) “Blue(White)” is a white blue line with the opponent of the twist pair. (2) “Yellow, Brown” is both lines of a yellow and brown twist pair. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-37 Wiring Instructions FS02/03 and FC02 : Controller Manipulator 1FR/1GW 1HW Figure FS02/03 and FC02 Sensor Wiring Diagram 5-38 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions 5.3.7. Solenoid Valve Wiring Diagram (Handling Specification) Js5/JC5/JW5/Js10: Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for Js5, JC5, JW5 and Js10 Robots KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-39 Wiring Instructions Js30/40 : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Value Wiring for Js30/40 Robots 5-40 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions U-Series : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for U-Series Robots KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-41 Wiring Instructions UD100/150 : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for UD100/150 Robots 5-42 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions ZX, ZT Series : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for ZX, ZT Series Robots KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-43 Wiring Instructions ZD Series : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for ZD130 Robot 5-44 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions FS/FC/FW-06/10/20(A001) : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for FS/FC/FW-06/10/20(A001) Robots KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-45 Wiring Instructions FS-06/10/20(B002) : Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for FS-06/10/20(B002) Robots 5-46 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions FS30/45(A001): Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for FS30/45(A001) Robots KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-47 Wiring Instructions FS30/45(B002): Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for FS30/45(B002) Robot 5-48 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Wiring Instructions FS02/03 and FC02: Controller Manipulator 1FR/1GW 1HW Figure Solenoid Valve Wiring for FS02/03 and FC02 Robots KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 5-49 Wiring Instructions ✎ 5-50 MEMO KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-1 User Interface Connections A.0. APPENDIX....................................................................................................... A-3 A.1. CONVERSION TABLES.................................................................................. A-3 A.1.1. Conversion from Fractional Inches to Millimeters ..............................................................A-4 A.1.2. Conversion from Millimeters to Inches ...............................................................................A-5 A.1.3. Conversion from Decimal Inches to Millimeters.................................................................A-6 A.1.4. Conversion from Foot-Pounds to Meter-Kilograms............................................................A-7 A.1.5. Conversion of Inch-Pounds to Inch-Ounces ......................................................................A-8 A.1.6. Conversion of Foot-Pounds to Inch-Pounds ......................................................................A-9 A.1.7. Conversion of Inch-Pounds to Centimeter-Kilograms......................................................A-10 A.1.8. Conversion of Foot-Pounds to Meter-Kilograms..............................................................A-11 A.1.9. Conversion of Foot-Pounds to Newton-Meters ................................................................A-12 A.1.10. Conversion of Inch-Pounds to Newton-Meters ..............................................................A-13 A.1.11. Conversion of Inch-Ounces to Newton-Meters ..............................................................A-14 A.2. STANDARD TORQUE TABLES.................................................................... A-15 A-2 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.0. APPENDIX A.1. CONVERSION TABLES Prefixes for Units: Units of Length: km × 0.6212 = mile × 1,000,000 m × 3.281 = ft k × 1,000 mm × 0.03937 = in centi c × 0.01 Units of Torque: mili m × 0.001 Nm × 0.1020 = kg-m micro µ × 0.000001 Nm × 0.7376 = ft-Ib Nm × 8.851 = in-Ib Prefix Symbol mega M kilo Power Units of Mass: Kg × 2.205 = Ib kg-m × 9.807 = Nm g × 0.03527 = oz kg-m × 7.233 = ft-Ib kg-m × 86.80 = in-Ib Units of Volume: L × 0.2642 = gal(US) Units of Pressure: L × 0.2200 = gal(imp) kPa × 0.01020 = kg/cm L × 1.057 = qt(US) kPa × 0.1450 = psi L × 0.8799 = qt(imp) kPa L × 2.113 = pint(US) kg/cm L × 1.816 = pint(imp) mL × 0.03381 = mL × 0.02816 mL × 0.6102 × 0.7501 = cmHg 2 × 98.07 = kPa kg/cm 2 × 14.22 = psi oz(USA) cmHg × 1.333 = kPa = oz(imp) Units of Speed: = cu in km/h 0.6214 = mpa Units of Force: -40 °C × Units of Power: N × 0.1020 = kg kW × 1.360 = PS N × 0.2248 = lb kW × 1.341 = HP kg × 9.807 = N PS × 0.7355 = kW kg × 2.205 = lb PS × 0.9863 = HP Units of Temperature: 9(° C + 40) − 40 =° F 5 °F -40 2 5(° F + 40) − 40 =° C 9 32 -20 0 -20 -17.8 20 40 0 4.4 68 60 80 20 26.7 104 100 120 140 40 60 48.9 176 160 180 200 80 71.1 220 240 100 93.3 284 °F 260 280 300 320 120 116 140 138 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL 160 °C A-3 Appendix A.1.1. Conversion from Fractional Inches to Millimeters 1/64 1/32 3/64 inch 0.015625 0.031250 0.046875 mm 0.396875 0.793750 1.190625 33/64 17/32 35/64 inch 0.515625 0.531250 0.546875 mm 13.096875 13.493750 13.890625 1/16 0.062500 1.587500 9/16 0.562500 14.287500 5/64 3/32 7/64 0.078125 0.093750 0.109375 1.984375 2.381250 2.778125 37/64 19/32 39/64 0.578125 0.593750 0.609375 14.684375 15.081250 15.478125 1/8 0.125000 3.175000 5/8 0.625000 15.875000 9/64 5/32 11/64 0.140625 0.156250 0.171875 3.571875 3.968750 4.365625 41/64 21/32 43/64 0.640625 0.656250 0.671875 16.271875 16.668750 17.065625 3/16 0.187500 4.762500 11/16 0.687500 17.462500 13/64 7/32 15/64 0.203125 0.218750 0.234375 5.159375 5.556250 5.953125 45/64 23/32 47/64 0.703125 0.718750 0.734375 17.859375 18.256250 18.653125 1/4 0.250000 6.350000 3/4 0.75000 19.050000 17/64 9/32 19/64 0.265625 0.281250 0.296875 6.746875 7.143750 7.540625 49/64 25/32 51/64 0.765625 0.781250 0.796875 19.446875 19.843750 20.240625 5/16 0.312500 7.937500 13/16 0.812500 20.637500 21/64 11/32 23/64 0.328125 0.343750 0.329375 8.334375 8.731250 9.128125 53/64 27/32 55/64 0.828125 0.843750 0.859375 21.034375 21.431250 21.828125 3/8 0.375000 9.525000 7/8 0.875000 22.225000 25/64 13/32 27/64 0.390625 0.406250 0.421875 9.921875 10.318750 10.715625 57/64 29/32 59/64 0.890625 0.906250 0.921875 22.621875 23.018750 23.415625 7/16 0.437500 11.112500 15/16 0.937500 23.812500 29/64 15/32 31/64 0.453125 0.468750 0.484375 11.509375 11.906250 12.303125 61/64 31/32 63/64 0.953125 0.968750 0.984375 24.209375 24.606250 25.003125 1/2 0.500000 12.70000 1 1.00000 25.40000 NOTE: All Values in table are exact. A-4 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.1.2. Conversion from Millimeters to Inches mm 1 2 3 4 5 inch 0.03937008 0.07874016 0.11811024 0.15748031 0.19685039 mm 36 37 38 39 40 inch 1.4173228 1.4566929 1.4960630 1.5354331 1.5748031 mm 71 72 73 74 75 inch 2.7952756 2.8346457 2.8740157 2.9133858 2.9527559 6 7 8 9 10 0.23422047 0.27559055 0.31496063 0.534330071 0.3937008 41 42 43 44 45 1.6141732 1.6535433 1.6929134 1.7322835 1.7716535 76 77 18 79 80 2.9921260 3.0314961 3.0708661 3.1102362 3.1496063 11 12 13 14 15 0.4330709 0.4724409 0.5118110 0.5511811 0.5905512 46 47 48 49 50 1.8110236 1.8503937 1.8897638 1.9291339 1.9685039 81 82 83 84 85 3.1889764 3.2283465 3.2677165 3.3070866 3.3464567 16 17 18 19 20 0.6299213 0.6692913 0.7086614 0.7480315 0.7874016 51 52 53 54 55 2.0078760 2.0472241 2.0866142 2.1259842 2.1653543 86 87 88 89 90 3.3855268 3.4251968 3.4645669 3.5039370 3.5433071 21 22 23 24 25 0.8267717 0.8661417 0.9055118 0.9448819 0.9842520 56 57 58 59 60 2.2047255 2.2440945 2.2834646 2.3228346 2.3622047 91 92 93 94 95 3.5826772 3.6220472 3.6614173 3.7007874 3.7401575 26 27 28 29 30 1.0236220 1.0629921 1.1023622 1.1417323 1.1811024 61 62 63 64 65 2.4015748 2.4409949 2.4803150 2.5196850 2.5590551 96 97 98 99 100 3.7795276 3.8188976 3.8582677 3.8976378 3.937008 31 32 33 34 35 1.2204724 1.2598425 1.2992126 1.3385827 1.3779528 66 67 68 69 70 2.5984252 2.6377953 2.6771654 2.7165354 2.7559055 NOTE: The inch values in this table are rounded off. To convert mm to inches : divide 25.4 into known mm. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-5 Appendix A.1.3. Conversion from Decimal Inches to Millimeters inch 1 2 3 4 5 25.4 50.8 76.2 101.6 127.0 mm inch 36 37 38 39 40 mm 914.4 939.8 965.2 990.6 1016.0 inch 71 72 73 74 75 mm 1803.4 1828.8 1854.2 1879.6 1905.0 6 7 8 9 10 152.4 177.8 203.2 228.6 254.0 41 42 43 44 45 1041.4 1066.8 1092.2 1117.6 1143.0 76 77 18 79 80 1930.4 1955.8 1981.2 2006.6 2032.0 11 12 13 14 15 279.4 304.8 330.2 355.6 381.0 46 47 48 49 50 1168.4 1193.8 1219.2 1244.6 1270.0 81 82 83 84 85 2057.4 2082.2 2108.2 2133.6 2159.0 16 17 18 19 20 406.4 431.8 457.2 482.6 508.0 51 52 53 54 55 1295.4 1320.8 1346.2 1371.6 1397.0 86 87 88 89 90 2184.4 2209.8 2235.2 2260.6 2286.0 21 22 23 24 25 533.4 558.8 584.2 609.6 635.0 56 57 58 59 60 1422.4 1447.8 1473.2 1498.6 1524.0 91 92 93 94 95 2311.4 2336.8 2362.2 2387.6 2413.0 26 27 28 29 30 660.4 685.8 711.2 736.6 762.0 61 62 63 64 65 1549.4 1574.8 1600.2 1625.6 1651.0 96 97 98 99 100 2438.4 2463.8 2489.2 2514.6 2540.0 31 32 33 34 35 787.4 812.8 838.2 863.6 889.0 66 67 68 69 70 1676.4 1701.8 1727.2 1752.6 1778.0 NOTE : All valves in this table are exact. A-6 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.1.4. Conversion from Foot-Pounds to Meter-Kilograms The chart below can be used to convert foot-pounds to meter-kilograms. The foot-pound column at the left increases in 10 ft.-lb. increments from 0 to 110 ft.-lbs. For each additional ft-lb., read the top row of numbers. For example, if you desire 45ft.-lbs., look to the number 40 in the left column and the number 5 in the top row. The conversion to meter-kilograms would be 6.22 Mkgs. For your use, the conversion formula is: FT.-LBS.X 0.1383 = METER-KILOGRAMS ft.lb. 0 mkg 0 10 20 30 40 50 60 70 80 90 100 0 1.383 2.766 4.149 5.532 6.915 8.298 9.681 11.06 12.45 13.83 1 mkg 0.138 1.521 2.904 4.287 5.670 7.053 9.436 9.819 44.20 12.59 2 mkg 0.277 1.660 3.043 4.426 5.809 7.191 8.574 9.957 11.34 12.73 From FT.-LB. TO MKG 3 4 5 mkg mkg mkg 0.415 0.553 0.691 1.798 1.936 2.074 3.181 3.319 3.457 4.564 4.702 4.840 5.947 6.085 6.223 7.330 7.468 7.606 8.713 8.851 8.989 10.09 10.23 10.37 11.48 11.62 11.75 12.86 13.00 13.14 6 mkg 0.830 2.212 3.596 4.979 6.362 7.745 9.128 10.51 11.89 13.28 7 mkg 0.968 2.351 3.734 5.117 6.500 7.882 9.266 10.65 12.03 13.42 8 mkg 1.106 2.489 3.872 5.255 6.638 8.021 9.404 10.79 12.17 13.55 9 mkg 1.245 2.628 4.011 5.394 6.777 8.159 9.543 10.92 12.31 13.69 Ft.lb. X.1383 =mkg mkg 0 ft.lb. 0 10 20 30 40 50 60 70 80 90 100 0 72.4 144.7 217.0 289.3 361.7 434.0 506.3 578.6 651.0 723.3 1 ft.lb. 7.23 79.6 151.9 224.2 296.6 368.9 441.2 513.5 585.9 658.2 2 ft.lb. 14.47 86.8 159.1 231.5 303.9 376.1 448.4 520.8 593.1 665.4 From MKG TO FT.-LB. 3 4 5 ft.lb. ft.lb. ft.lb. 21.70 28.93 36.17 94.0 101.3 108.5 166.4 173.6 180.8 238.7 245.9 253.2 311.0 318.3 325.5 383.3 390.6 397.8 455.7 462.9 470.1 528.0 535.2 542.5 600.3 607.6 614.8 672.7 679.9 687.1 6 ft.lb. 43.40 115.7 188.1 260.4 332.7 405.0 477.4 549.7 622.0 694.4 7 ft.lb. 50.63 123.0 195.3 267.6 340.0 412.3 484.6 556.9 629.3 701.6 8 ft.lb. 57.86 130.2 202.5 274.9 347.2 419.5 491.8 564.2 636.5 708.8 9 ft.lb. 65.10 137.4 209.8 284.1 354.4 426.7 499.1 571.4 643.7 716.1 mkg X 7.233 = ft.lb. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-7 Appendix A.1.5. Conversion of Inch-Pounds to Inch-Ounces in.lb. 0 10 20 30 40 50 60 70 80 90 100 0 in.oz. 0 160 320 480 640 800 960 1120 1280 1440 1600 1 in.oz. 16 176 336 496 656 816 976 1236 1296 1456 2 in.oz. 32 192 352 512 672 832 992 1152 1312 1472 From IN.-LB. to IN.-OZ. 3 4 5 in.oz. in.oz. in.oz. 48 64 80 208 224 240 368 384 400 528 544 560 688 704 720 848 864 880 1008 1024 1040 1168 1184 1200 1328 1344 1360 1488 1504 1520 6 in.oz. 96 256 416 576 736 894 1056 1216 1376 1536 7 in.oz. 112 272 432 592 752 912 1072 1232 1392 1552 8 in.oz. 128 288 448 608 768 928 1088 1248 1408 1568 9 in.oz. 144 304 464 624 784 944 1104 1264 1424 1584 6 in.lb .375 1.000 1.625 2.250 2.875 3.500 4.125 4.750 5.375 6.000 7 in.lb .438 1.063 1.688 2.313 2.938 3.563 4.188 4.813 5.438 6.063 8 in.lb .500 1.125 1.750 2.375 3.000 3.625 4.250 4.875 5.500 6.125 9 in.lb .563 1.188 1.813 2.458 3.063 3.688 4.313 7.938 5.563 6.188 in. lb. X 16 = in.oz. in.oz 0 in.lb 0 10 20 30 40 50 60 70 80 90 100 0 .625 1.250 1.875 2.500 3.125 3.750 4.375 5.000 5.625 6.250 1 in.lb .063 .688 1.313 1.938 2.563 3.188 3.813 4.438 5.063 5.688 2 in.lb .125 .750 1.375 2.000 2.625 3.250 3.875 4.500 5.125 5.750 From IN.-OZ. to IN.-LB. 3 4 5 in.lb in.lb in.lb .188 .250 .313 .813 .875 .938 1.438 1.500 1.563 2.063 2.125 2.188 2.688 2.750 2.813 3.313 3.375 3.438 3.938 4.000 4.063 4.563 4.625 4.688 5.188 5.250 5.313 5.813 5.875 5.938 in.oz. ... 16 = in.lb. A-8 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.1.6. Conversion of Foot-Pounds to Inch-Pounds ft.lb. 0 10 20 30 40 50 60 70 80 90 100 0 in.lb. 0 120 240 360 480 600 720 840 960 1080 1200 1 in.lb. 12 132 252 372 492 612 732 852 972 1092 2 in.lb. 24 144 264 384 504 624 744 864 984 1104 From FT.-LB. to IN.-LB. 3 4 5 in.lb. in.lb. in.lb. 36 48 60 156 168 180 276 288 300 396 408 420 516 528 540 636 648 660 756 768 780 876 888 900 996 1008 1020 1116 1128 1140 6 in.lb. 72 192 312 432 552 672 792 912 1032 1152 7 in.lb. 84 204 324 444 564 684 804 924 1044 1164 8 in.lb. 96 216 336 456 576 696 816 936 1056 1176 9 in.lb. 108 228 348 468 588 708 828 948 1068 1188 6 in.lb .500 1.333 2.167 3.000 3.833 4.667 5.500 6.333 7.167 8.000 7 in.lb .583 1.417 2.250 3.083 3.917 4.750 5.583 6.417 7.250 8.083 8 in.lb .667 1.500 2.333 3.167 4.000 4.833 5.667 6.500 7.333 8.167 9 in.lb .750 1.583 2.417 3.250 4.083 4.917 5.750 6.583 7.417 8.250 in. lb. X 12 = in.lb. ft.lb 0 in.lb 0 10 20 30 40 50 60 70 80 90 100 0 .833 1.677 2.500 3.333 4.167 5.000 5.833 6.667 7.500 8.333 1 in.lb .083 .917 1.750 2.583 3.417 4.250 5.083 5.917 6.750 7.583 2 in.lb .167 1.000 1.833 2.667 3.500 4.333 5.167 6.000 6.833 7.667 From IN.-LB. to FT.-LB. 3 4 5 in.lb in.lb in.lb .250 .333 .417 1.083 1.167 1.250 1.917 2.000 2.083 2.750 2.833 2.917 3.583 3.667 3.750 4.417 4.500 4.583 5.250 5.333 5.417 6.083 6.167 6.250 6.917 7.000 7.083 7.750 7.833 7.917 in.lb. ... 12 = ft.lb. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-9 Appendix A.1.7. Conversion of Inch-Pounds to Centimeter-Kilograms in.lb. 0 10 20 30 40 50 60 70 80 90 100 0 cmkg. 0 11.52 23.04 34.56 46.09 57.61 69.13 80.65 92.17 103.7 115.2 1 cmkg. 1.152 12.67 24.19 35.71 47.23 58.75 70.27 81.79 93.32 104.9 2 cmkg. 2.304 13.83 25.35 36.87 48.39 59.90 71.42 82.94 94.49 106.1 From IN.-LB. to CMKG 3 4 5 cmkg. cmkg. cmkg. 3.456 4.608 5.760 14.97 16.13 17.28 26.49 27.65 28.80 38.02 39.17 40.32 49.54 50.69 51.85 61.06 62.21 63.37 72.57 73.73 74.89 84.05 85.21 86.41 95.66 96.83 97.93 107.2 108.3 109.5 6 cmkg. 6.912 18.43 29.96 41.47 52.99 64.51 76.03 87.58 99.08 110.7 7 cmkg. 8.064 19.59 31.07 42.62 54.14 65.66 77.18 88.75 100.2 111.8 8 cmkg. 9.217 20.74 32.26 43.77 55.29 66.81 78.33 89.91 101.4 112.9 9 cmkg. 10.36 21.89 33.41 36.60 56.45 67.96 79.49 91.00 102.6 114.1 6 in.lb 5.206 7 in.lb 6.074 8 in.lb 6.942 9 in.lb 7.809 13.883 22.560 31.237 39.914 48.591 57.268 65.945 74.622 83.299 14.751 23.428 32.105 40.782 49.459 58.136 66.813 75.490 84.167 15.619 24.296 32.973 41.650 50.327 59.004 67.681 76.358 85.035 16.486 25.163 33.840 42.517 51.194 59.871 68.548 77.225 85.902 in. lb. X 1.152 = cmkg cmkg 0 10 20 30 40 50 60 70 80 90 100 0 in.lb 0 8.677 17.354 26.031 34.708 43.385 52.062 60.739 69.416 78.093 86.770 1 in.lb .868 2 in.lb 1.735 9.545 18.222 26.899 35.576 44.253 52.930 61.607 70.284 78.961 10.412 19.089 27.766 36.443 45.120 53.797 62.474 71.151 79.828 From CMKG to IN.-LB. 3 4 5 in.lb in.lb in.lb 2.603 3.471 4.339 11.280 19.957 28.634 37.311 45.988 54.665 63.642 72.019 80.670 12.148 20.825 29.502 38.179 46.856 55.533 64.010 72.019 80.670 13.016 21.693 30.370 39.047 47.724 56.401 65.078 73.754 82.432 cmkg X 0.8677 = in.lb. A-10 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.1.8. Conversion of Foot-Pounds to Meter-Kilograms ft.lb. 0 10 20 30 40 50 60 70 80 90 100 0 mkg. 0 1.383 2.766 4.149 5.532 6.915 8.298 9.681 11.06 12.45 13.83 1 mkg. 0.138 1.521 2.904 4.287 5.670 7.053 8.436 9.819 11.20 12.59 2 mkg. 0.277 1.660 3.043 4.426 5.809 7.191 8.574 9.957 11.34 12.73 From FT.-LB. to MKG 3 4 5 mkg. mkg. mkg. 0.415 0.533 0.691 1.798 1.936 2.074 3.181 3.319 3.457 4.564 4.702 4.840 5.947 6.085 6.223 7.330 7.468 7.606 8.713 8.851 8.989 10.09 10.23 10.37 11.48 11.62 11.75 12.86 13.00 13.14 6 mkg. 0.830 2.212 3.596 4.979 6.362 7.745 9.128 10.51 11.89 13.28 7 mkg. 0.968 2.351 3.734 5.117 6.500 7.883 9.266 10.65 12.03 13.42 8 mkg. 1.106 2.489 3.872 5.255 6.638 8.021 9.404 10.79 12.17 13.55 9 mkg. 1.245 2.628 4.011 5.394 6.777 8.159 9.543 10.92 12.31 13.69 6 ft.lb 43.40 115.7 188.1 260.4 332.7 405.0 477.4 549.7 622.0 694.4 7 ft.lb 50.63 123.0 195.3 267.6 340.0 412.3 484.6 556.9 629.3 701.6 8 ft.lb 57.86 130.2 202.5 274.9 347.2 419.5 491.8 564.2 636.5 708.8 9 ft.lb 65.10 137.4 209.8 284.1 354.4 426.7 499.1 571.4 643.7 716.1 ft.lb. X 1383 = mkg mkg 0 ft.lb 0 10 20 30 40 50 60 70 80 90 100 0 72.4 114.7 217.0 289.3 361.7 434.0 506.3 578.6 651.0 723.3 1 ft.lb 7.23 79.6 151.9 224.2 296.6 368.9 441.2 513.5 585.9 658.2 2 ft.lb 14.47 86.8 159.1 231.5 303.9 376.1 448.4 520.8 593.1 665.4 From MKG to FT.-LB. 3 4 5 ft.lb ft.lb ft.lb 21.70 28.93 36.17 94.0 101.3 108.5 166.4 173.6 180.8 238.7 245.9 253.2 311.0 318.3 325.5 383.3 390.6 397.8 455.7 462.9 470.1 528.0 535.2 542.5 600.3 607.6 614.8 672.7 679.9 687.1 mkg X 7.233 = ft.lb. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-11 Appendix A.1.9. Conversion of Foot-Pounds to Newton-Meters ft.lb. 0 10 20 30 40 50 60 70 80 90 100 0 Nm 0 13.56 27.11 40.67 54.22 67.78 81.33 94.89 108.45 122.00 135.66 1 Nm 1.36 14.91 28.47 42.02 55.58 69.14 82.69 2 Nm 2.71 16.27 29.83 43.48 56.94 70.49 84.05 96.25 109.80 123.36 97.60 111.16 124.72 From FT.-LB. to NM 3 4 5 Nm Nm Nm 4.07 5.42 6.78 17.62 18.98 20.33 29.83 32.54 33.89 43.38 46.09 47.45 56.94 59.65 61.00 70.49 73.20 74.56 84.05 86.76 88.11 97.60 111.16 124.72 100.31 113.87 127.43 101.67 115.23 128.78 6 Nm 8.13 21.69 35.25 48.80 62.36 75.91 89.47 7 Nm 9.49 23.05 36.61 50.16 63.71 77.27 90.83 8 Nm 10.84 24.40 37.97 51.51 65.07 78.62 92.18 9 Nm 12.20 25.76 39.32 52.87 66.42 79.98 93.54 103.03 116.58 130.14 104.38 117.94 131.49 105.75 119.29 132.85 107.09 120.65 134.20 6 ft.lb 4.43 11.80 19.18 26.55 33.93 41.30 48.68 56.05 63.43 70.81 7 ft.lb 5.16 12.54 19.91 27.29 34.67 42.04 49.42 56.79 64.17 71.54 8 ft.lb 5.90 13.28 20.65 28.03 35.40 42.78 50.15 57.53 64.91 72.28 9 ft.lb 6.64 14.01 21.39 28.76 36.14 43.52 50.89 58.27 65.64 73.02 ft.lb. X 1.3556 = Nm Nm 0 ft.lb 0 10 20 30 40 50 60 70 80 90 100 0 7.38 14.75 22.13 29.50 36.88 44.25 51.63 59.00 66.38 73.76 1 ft.lb .74 8.11 15.49 22.86 30.24 37.62 44.99 52.37 59.74 67.12 2 ft.lb 1.48 8.85 16.23 23.60 30.98 38.35 45.73 53.10 60.48 67.86 From Nm to FT.-LB. 3 4 5 ft.lb ft.lb ft.lb 2.21 2.95 3.69 9.59 10.33 110.6 16.96 17.70 18.44 24.34 25.08 25.81 31.72 32.45 33.19 39.09 39.83 40.57 46.47 47.20 47.94 53.84 54.58 55.32 61.22 61.96 62.69 68.59 69.33 70.07 1 Nm = 0.73756 ft.lb. A-12 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.1.10. Conversion of Inch-Pounds to Newton-Meters in.lb. 0 Nm 0 10 20 30 40 50 60 70 80 90 100 0 1.13 2.26 3.39 4.52 5.65 6.78 7.91 9.04 10.17 11.30 1 Nm .113 1.24 2.37 3.50 4.63 5.76 6.89 8.02 9.15 10.28 2 Nm .226 1.36 2.49 3.62 4.75 5.88 7.01 8.14 9.27 10.40 From IN.-LB. to NM 3 4 5 Nm Nm Nm .339 .452 .565 1.47 1.58 1.70 2.60 2.71 2.83 3.73 3.84 3.96 4.86 4.97 5.9 5.99 6.10 6.22 7.12 7.23 7.35 8.25 8.36 8.48 9.38 9.49 9.61 10.51 10.62 10.74 6 Nm .678 1.81 2.94 4.07 5.20 6.33 7.46 8.59 9.72 10.85 7 Nm .791 1.92 3.05 4.18 5.31 6.44 7.57 8.70 9.83 10.96 8 Nm .904 2.03 3.16 4.29 5.42 6.55 7.68 8.81 9.94 11.07 9 Nm 1.02 2.15 3.28 4.41 5.54 6.67 7.80 8.93 10.06 11.19 6 in.lb 53.10 7 in.lb 61.95 8 in.lb 70.81 9 in.lb 79.66 141.61 230.12 318.62 407.13 495.64 584.15 672.65 761.16 849.67 150.46 238.98 327.48 415.98 504.49 592.10 681.50 770.01 858.52 159.31 247.82 336.33 424.83 513.34 601.85 690.35 778.86 867.37 168.16 256.67 345.18 433.68 522.19 610.70 699.20 787.21 876.22 in.lb. X .1130 = Nm Nm 0 10 20 30 40 50 60 70 80 90 100 0 in.lb 0 88.51 177.01 265.52 354.03 442.53 531.04 619.55 708.06 796.56 885.07 1 in.lb 8.85 2 in.lb 17.70 97.36 185.86 274.38 362.88 451.36 539.89 628.40 716.91 805.41 106.21 194.72 283.22 371.73 460.24 548.74 637.25 725.76 814.26 From NM to IN.-LB. 3 4 5 in.lb in.lb in.lb 26.55 35.40 44.25 115.06 203.57 292.07 380.58 469.09 557.59 646.10 734.61 823.12 123.91 212.42 300.92 389.43 477.94 566.44 654.95 743.46 831.97 132.76 221.27 309.77 398.28 486.79 575.30 663.80 752.31 840.82 Nm X 8.8507 = in.lb. KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-13 Appendix A.1.11. Conversion of Inch-Ounces to Newton-Meters in.oz. 0 10 20 30 40 50 60 70 80 90 100 0 Nm 0 .071 .114 .212 .282 .353 .424 .494 .565 .635 .706 1 Nm .007 .078 .148 .219 .289 .360 .431 .501 .572 .642 2 Nm .014 .085 .155 .226 .297 .367 .438 .508 .579 .650 From IN.-OZ. to NM 3 4 5 Nm Nm Nm .021 .028 .035 .092 .098 .106 .162 .177 .184 .232 .240 .247 .304 .312 .318 .374 .381 .388 .445 .452 .459 .515 .522 .530 .586 .593 .600 .657 .664 .671 6 Nm .042 .113 .191 .254 .324 .395 .466 .537 .607 .678 7 Nm .049 .120 .198 .261 .332 .402 .473 .544 .614 .685 8 Nm .056 .127 .205 .268 .339 .409 .480 .551 .621 .692 9 Nm .064 .134 3.28 .275 .346 .417 .487 .558 .628 .699 in.oz. X .00706 = Nm Nm 0 10 20 30 40 50 60 70 80 90 100 0 in.oz 0 14.16 28.32 42.48 56.64 70.81 84.97 99.13 113.29 127.45 141.61 1 in.oz 1.42 15.58 29.74 43.90 58.06 72.22 86.41 2 in.oz 2.83 16.99 31.15 45.32 59.48 73.64 87.80 From NM to IN.-OZ. 3 4 5 in.oz in.oz in.oz 4.25 5.66 7.08 18.41 19.83 21.24 32.57 33.99 35.40 46.73 48.15 49.56 60.89 62.31 63.72 75.05 76.47 77.89 89.21 90.63 92.05 6 in.oz 8.50 22.66 36.82 50.98 65.14 79.30 93.46 7 in.oz 9.91 24.07 38.23 52.40 66.56 80.72 94.88 8 in.oz 11.33 25.49 39.65 53.81 67.97 82.13 96.30 9 in.oz 12.74 26.91 41.07 55.23 69.39 83.55 97.71 100.54 114.70 128.87 101.96 116.12 130.28 103.38 117.54 131.70 107.62 121.79 135.95 109.04 123.20 137.36 110.46 124.62 138.78 111.87 126.03 140.19 104.79 118.95 133.11 106.21 120.37 134.53 .01 Nm X 141.612 = .01 in.oz. A-14 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL Appendix A.2. STANDARD TORQUE TABLES The following tables, relating tightening torque to thread diameter, list the basic torque for bolts and nuts. Use the tables only for bolts and nuts which do not require a specific torque value, and which are being screwed into steel or cast iron. If screws are inserted in aluminum or aluminum alloys, torque must be reduced. All values are for use with dry, solvent-cleaned threads. Table General Fasteners Standard Torque Values General Fasteners: Thread dia. Torque (mm) N-m kg-m ft-lb 5 3.4-4.9 0.35-0.50 30-43 in-lb 6 5.9-7.8 0.60-0.80 52-69 in-lb 8 14-19 1.4-1.9 10.0-13.5 10 25-39 2.6-3.5 19.0-25.0 12 44-61 4.5-6.2 33.0-45.0 14 73-98 7.4-10.0 54.0-72.0 16 115-155 11.5-16.0 83.0-115.0 18 165-225 17.0-23.0 125.0-165.0 20 225-325 23.0-33.0 165.0-240.0 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL A-15 Appendix Table Special Material Fastener Torque Values Torque kg-cm (ft-lb) Cap Screw size SCM3 S45C SS41 M3 - - - 4 35(2.53) 20(1.44) 10(0.72) 5 70(5.06) 40(2.89) 20(1.44) 6 120(8.67) 70(5.06) 30(2.16) 8 300(21.69) 170(12.29) 80(5.78) 10 580(41.95) 340(24.59) 160(11.57) 12 1000(72.33) 600(43.39) 280(20.25) 14 1600(115.72 900(65.09) 420(30.37) 16 2400(173.5) 1400(101.26) 650(47.0) 18 3400(245.92) 1900(137.42) 880(63.6) 20 4400(318.25) 2700(195.29) 1300(94) * Values in parentheses are foot-pounds (ft-lb). MATERIAL KEY: SS41 -Mild Steel S45C -Carbon Steel SCM3 -Chrome/Moly Steel ! CAUTION There are many varying factors which affect torque. The figure in the following charts are safe figures for standard torque applications when fastener is screwed into steel or cast iron threads only. A-16 KAWASAKI ROBOT C3✻/C4✻/C70C80 Controller INSTALLATION & CONNECTION MANUAL INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-1 Glossary This glossary contains definitions of terms used by operators, programmers and maintenance personnel who work with Kawasaki Robots. The definitions are listed in alphabetical order. A z ACCELERATE To speed up a process. z ACCURACY A measure of the difference between the commanded robot arm position and the actual position. Also identifies how well an indicated value conforms to a true value (i.e., an actual or accepted standard value). z ACRONYM A term made up of the initial letters of words in a set phrase. For example, LED is an acronym for light emitting diode. z ADDRESS A number that identifies a specific location in the computer’s or processor’s memory. Means of identifying a location or data in a control system. z ADDRESSING Computer operations store data in specific memory locations or addresses. The largest memory location determines the amount of data that can be stored. The larger the number, the larger the possible program. z AIR CUT Moving a weld gun into position but without generating an arc. z ALGORITHM A finite set of well-defined rules or procedures for solving a program step-by-step. z ALPHANUMERIC Pertaining to a set of symbols that contain both letters and numbers, either individually or in combination. z AMBIENT TEMPERATURE The temperature of air or liquid that surrounds a device. z AMPERE (AMP) A unit of electrical current flow that is equivalent to one(1) coulomb per second. One (1) volt across one (1) ohm of resistance causes a current flow that is equivalent to one (1) amp. z ANALOG A continuously changing electrical voltage signal. In robot systems, the magnitude or value of the signal represents commanded robot axis motion. z ANALOG DATA Information that is represented by a characteristic of the value or magnitude of an electrical signal, such as the amplitude, phase, or frequency of the voltage, the amplitude or duration of a pulse, the angular position of a shaft, or the pressure of a fluid number. z ANTI-FRICTION BEAING A rolling element which is used to support a rotating shaft. G-2 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z ARC SENSOR A sensor that detects weld lines utilizing arc characteristics. z ARGUMENT A value applied to a procedure; data used by a function or other command. For instance, in the AS command JMOVE flange, 2. The variable, flange, and the clamp number 2 are the arguments of the function JMOVE. z ARRAY AN ordered set of addresses or their values. Elements of an array can be referenced individually or collectively. Array elements all have the same type of data, for instance, integer or character, and are usually presented in rows and columns. z ARTICULATED To join together permanently or semipermanently by means of a pivot connection for operating separate segments as a unit. z ARTICULATED ROBOT A robot arm which contains at least two consecutive revolute joints, acting around parallel axes, resembling human arm motion. The work envelope is formed by partial cylinders or spheres. The two basic types of articulated robots, vertical and horizontal, are sometimes called anthropomorphic because of the resemblance to the motions of the human arm. z ASCII An acronym for American Standard Code for Information Interchange. This standard 8-bit code is used by many devices, such as keyboards and printers. z AS LANGUAGE Kawasaki robot language used to communicate commands and instructions from a keyboard to the CPU. (AS: Advanced Superior, pronounced AZU) z ASSIGNMENT An instruction used to express a sequence of operations, or used to assign operands to specified variables, or symbols, or both. z ASYCHRONOUS A means of data communication where the data is sent a character at a time preceded by a start bit and followed by a stop bit. No direct timing signal links the transmitter and receiver. z AUXILIARY DATA Information about a point, other than the positional data, such as speed, accuracy weld schedule and clamp condition. z AXIS A straight line about which sections of the mechanical unit rotate (e.g.,joints JT1, JT2, JT3 etc.). KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-3 Glossary B z BACKLASH The clearance, slack or play between adjacent gears, or the jar or reaction often caused by such clearance when the parts are suddenly put in action or are in irregular action. z BASE COORDINATE A fixed coordinate system having an origin at the intersection of the X, Y, and Z axes. z BAUD RATE Determines the number of bits per second (bps) or characters transmitted between devices. z BCD An acronym for binary coded decimal. The BCD 8-4-2-1 code expresses each decimal digit by its own 4-bit binary equivalent. The 8-4-2-1 code is identical to binary through the decimal number 9. Above the decimal number 9 each decimal digit is represented by its own 4-bit binary equivalent. For example, using the 8-4-2-1 binary-coded system, the number 10 is interpreted as 0001 0000. z BINARY CODE A system in which characters are represented by a group of binary digits, that have the value of either 0 or 1, true or false, on or off. z BIT Acronym for binary digit, having one of two values: 0 or 1. z BOOT The method by which computers are brought from a non-operating to an operating state. During this sequence, the computer memory is usually reset. This is often performed to restart the computer after a crash, to bring it on-line. z BUFFER A temporary memory storage area in a computer or electronic device. z BUG A problem in a software or hardware element of a system. z BUS The primary communication path in the controller along which internal signals are sent among processors and memories. C z CABLE CARRIER A device which carries cables and hoses (including power sources) from a stationary location to a linear moving device. z CARTESIAN COORDINATE A location in space defined by three axes at right angles to each other, commonly labeled X, Y,Z. z cc cubic centimeter. G-4 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z CELL A manufacturing unit consisting of two or more work stations or machines, and the material transport mechanisms and storage buffers that interconnect them. z CENTER OF GRAVITY The point at which the entire weight of a body may be considered as concentrated, so that if supported at this point the body would remain in equilibrium in any position. z CHARACTER A term that describes all numbers, letters, and other symbols typically found on a computer keyboard. z CHECK MODE A procedure that allows the user to check positional data and auxiliary data while in the teach mode with the Kawasaki robot. This procedure is in many ways analogous to reverse point and forward point operations in other robot models. z CHECKSUM A method by which the contents of data or a transmission are verified to be accurate. This method ‘sums’ all the characters and translates them into a number which is appended to the data. z CHEMICAL ANCHOR A threaded rod installed in a structure (e.g.,a concrete floor) and secured by epoxy, for the purpose of securing hardware. z CIRCULAR INTERPOLATION A path taken by the robot that connects at least three points with an arching motion. The CPU will calculate a path that places the taught points on a section of a circle. z CLOSED-LOOP SYSTEM A system in which a command value is output and a feedback value is returned The resulting error, the difference between the command and the feedback, is used to correct the signal. In a robot system, the command signal is output by the controller, causing the robot arm to move, and the feedback signal is produced by the encoder, which reads the current position of the arm. z CODE A set of rules for expressing information in a language that is understood and processed by a control system. Also, a term for instructions in a computer program. Code performs a process, and data is the information that is processed. z COMMAND An analog signal, or group of signals or pulses, which cause a specified function to be performed. An instruction or request in a computer program that performs a particular action. Commands that are needed to run the operating system are called a command language. z COMMENT Optional, non-executing remarks added to a program to explain various aspects of the program. z COMPILER A system task that translates a program written in source code, into binary code that can be understood by the processor. z COMPOUND TRANSFORMATION KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-5 Glossary A location in the Cartesian coordinate system that is defined relative to another Cartesian coordinate location. z CONTIGUOUS FILE A file that is stored in continuously adjacent areas of memory, in contrast to a file which is scattered to make more efficient use of disk space. z CONTINUOUS PATH CONTROL A type of robot control in which the robot moves according to a replay of closely spaced points programmed on a constant time base during teaching. z CONTROL ERROR CODE A code which identifies system problems whenever an alarm condition occurs. z CONTROLLED AXIS A robot axis that is operated by electrical or hydraulic power. z CONTROLLER An electronic device, with processing capabilities and software, which controls the robot actions and functions. z CONVEYER TRACKING Used to make the robot follow a part on a conveyor, without the use of a traverse axis. z COORDINATE A set of numbers that locate a point in space. z CPU Acronym for central processing unit. A collection of hardware in a computer which performs all calculations, handles I/O, and executes programmed tasks. z CRASH A situation where the computer fails to operate, due to a software or hardware problem. z CRT An acronym for cathode ray tube. A CRT is a charge storage tube in which the information is written by means of the cathode ray beam. z CURRENT LOOP A circuit in which a portion of the output is returned to modify the control circuit output. This circuit may be used as a limiting device, for safety protection. z CURSOR A pointer or indicator on a computer screen, that identifies the current position on the screen. z CYCLE A complete path of projectory performed by the robot for a specific application. G-6 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z CYCLOIDAL DRAIVE A mechanical gear reduction unit that reduces the speed of the input and increase the torque capacity. The cyclodial unit consists of an internal arrangement of discs and pins that are driven by an eccentric drive cam. This type of gear reduction offers low gear train backlash and the capability to achieve high reduction ratios from a single contained unit. D z DATA A term given to information, instructions, words or symbols that are usually transmitted, processed, or stored as a group. z DETENT A part of a mechanism that locks or unlocks a movement. z DISCONNECT A switch that isolates a circuit or one or more pieces of electrical apparatus after the current has been interrupted by other means. z DEVIATION ERROR In all mechanical devices, the actual position of the mechanical unit will lag behind the electrical command of the controller. An allowable limit is assigned for this difference. However, if the controller detects a condition where the difference between this mechanical value and the desired electrical position is larger than the established value limit, the robot controller will generate a deviation error. This error is sometimes referred to as a FOLLOWING ERROR in the robot industry. z DEBUG The process by which an operator7s program is checked for mistakes and then corrected. z DECIMAL NUMBER Numbers in the base-10 numbering system, which uses the numerals 0-9. z DEDICATED A term used to describe a system resource, such as an I/O device or terminal, which is used for only one purpose, or assigned a single function. z DEDICATED SIGNAL A term used to describe a signal which is used for only one purpose, or assigned a single function. Both inputs and outputs an be dedicated. z DEFAULT A value or operation that is automatically entered by the system, if the operator does not specify one. Typically, the default is the standard or expected response. z DELETE A command which will eliminate unwanted data. z DELIMITER A character which separates a group of items or a character string, from other groups, or which terminates a task. KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-7 Glossary z DEVICE Any peripheral hardware connected to the processor and capable of receiving, sorting, or transmitting data. z DIAGNOSTICS Function performed by the processor to identify and check for error conditions in the robot arm and peripheral devices. z DIP SWITCH DIP is an acronym for dual in-line package. A set of small switches on circuit boars that can be set for different configurations. z DIRECTORY A logical structure that organizes a group of similar files. z DISK A high-speed, random-access memory device. z DISK-BASED SYSTEM System in which programs and files are stored on the hard disk and are read into memory when requested by the user. z DISK PACK A device which is used to store additional data in a computer system, and is usually removable. E z ECHO Process in which characters that are typed on a keyboard are also displayed on the screen or are sent to the printer. z EDITOR An aid for entering information into the computer system and modifying existing text. z EMERGENCY STOP (E-Stop) An immediate stop of robot motion, selected by the operator with a switch. z ENCODER An electromechanical device that is connected to a shaft to produce a series of pulses that indicate the position of the shaft. z EPROM Acronym for erasable programmable read-only memory. The contents of this memory (computer chip) are retained, even when power to the system is turned off. Usually stores executive programs and critical system error messages. z ERROR LOG A report which contains a sequential list of system error messages. z ERROR MESSAGE Messages displayed on the plasma screen of the robot controller, when the action requested by the operator could not be completed. Error messages can occur when components malfunction or if an incorrect command is typed by the operator. G-8 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z EXPRESSION A combination of real-valued variables and functions, and mathematical and logical operators. When evaluated, this combination yields a numeric value. F z FEEDBACK The transmission of a signal from a measuring device (e.g., encoder, transducer) to the device which issued the command signal within a closed-loop system. See CLOSED-LOOP SYSTEM. z FIELD SIGNALS All electrical signals that exit or enter an electrical panel. z FILE A set of related records or data elements, which are stored using one name and are arranged in a structire that can be used by a program. z FILESPEC Includes the name, creation data and size of the specified file. z FIXED DISK An electromagnetic mass storage device which is not removable. Hard disks have much highter storage capacity than floppy disks. z FLOPPY DISK An electromagnetic mass storage device which can be removed and exchanged. z FORM FEED Process which causes a printer to advance the paper to the top of the next page. z FUNCTION A formula or routine for evaluating an expression. G z GAIN A proportional increase in power or signal value relative to a control signal. The ratios of voltage, power, or current as related to a reference or control signal input. z GLOBAL Refers to a function or process that affects the entire system or file. z GRAY CODE A positional binary number notation in which any two numbers whose difference is one are represented by expressions that are the same except in one place or column and differ by only one unit in that place or column. H z HALF-DUPLEX COMMUNICATION Data transmission between two devices, where the signal is sent in only one direction at a time. KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-9 Glossary z HANDSHAKING PROTOCOL Communication rules used for data transmissions between devices. Each device must recognize the same protocol in order to communicate. z HANG A term which refers to the state of a computer system that seems to be inoperative when processing should be taking place. z HARDSTOP A mechanical constraint or limit on motion. z HARDWARE Physical equipment and devices such as computer hard disk, cables, printer, etc. z HAZARDOUS SIDE The unsafe side of a component or panel, such as the inside of the control panel when power in applied and functions are being performed. z HOLD When an external or an internal input is available for a hold condition, the robot will stop its motion and servo drive power will be removed from the robot. When an external hold reset is performed, the servo drive power will be energized. z HOME POSITION Refer to the starting or resting position of the robot. z HYBRID ENCODER On the Kawasaki robot a hybrid encoder is used to generate positional data, and in composed of an incremental encoder that generates incremental pulses, and an absolute encoder that generaters gray code binary data. I z ID Abbreviation for Identification. z INCHING A value that is used during the jogging process that allows the user to position the robot is small minute increments. z INCREMENTAL CODE A digital closed loop feedback code that provides digital feedback pulses to the robot controller for the purpose of providing positional information. These incremental pulses are generated by an encoder through the use of an optical disk with alternating opaque and generated by an encoder through the use of an optical disk with alternating opaque and transparent bars or lines around the periphery of the disk. On one side of the disk a light source is mounted, and on the opposite side a phototransistor. When the disk rotates, the phototransistor is alternately forced into saturation and cutoff, producing the digital signal. z INPUT Transmission of an external signal into a control system. G-10 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z INTEGRATED CIRCUIT(IC) A combination of interconnected circuit elements which are within a continuous substrate. z INTERACTIVE SYSTEM System where the user and the operating system communicate directly; the user through the keyboard, and the operating system via the display screen. z INTERLOCK An arrangement where by the operation of one part or mechanism automatically brings about or prevents the operation of another. z INTERPETER A program that changes English-like commands into machine language. An interpreter translates and executes one command at a time. z INSTRUCTIONS Discrete steps in a computer program that are commands or statements that tell a computer to do something or identify data. z INTEGER A whole number, a number without a fractional part such as 7, -318, or 19. z INTERFACE The circuitry that fits between a system and a peripheral device to provide compatible coupling between the two pieces of equipment. z INTERPOLATION The mathematical process that the CPU utilizes to plot a path for the robot to travel from one position to another. A mathematical process that evaluates a number of dependent and independent variables for the purpose of comparison and prediction. z INTERRUPT An external signal that halts program execution so that the computer can service the needs of some peripheral device or subsytstem. z INTRINSIC SAFETY BARRIER (ISB) An electronic device used in robot controllers to restrict current and voltage to a safe lavel. z INVERTER A circuit which switches a positive signal to a negative signal, and vice versa. z I/O Acronym for Input/Output. The interconnections through which the coputer and its peripheral devices communicate. z IPM Acronym for Intelligent Power Module KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-11 Glossary J z JOG A term used to describe the process in which the user moves the mechanical unit through interaction with the robot controller and the teach pendant. Sometimes referred to as slewing. z JOINT 1. A term used to describe the individual axes of a robot. 2. A term used to describe the jogging process in which the robot is jogged one axis at a time. z JOINT MOVE A mode of operation in which the robot moves from one point to the next with an arching path. All axes motors (required for the move) begin and end their rotation at the same time. The tool center point does not follow a linear path to reach the taught position. L z LABEL An identifier for a program command line. To identify an instruction, memory location, or part of a program. z LAN An acronym for local area network. A group of computer terminals interconnected by cables, allowing communication of information via the network. z LCD An acronym for liquid crystal display. This type of display is made of material whose reflectance or transmittance of light changes when an electric field is applied. z LIMIT SWITCH An electrical switch positioned to be switched when a motion limit occurs, thereby deactivating the actuator that caused the motion. z LINEAR MOVE An operation where the rate an direction of relative movement of the robot arm are continuously under computer control. z LINE PRINTER A high-speed output device that prints a line at a time. z LINE TURN-AROUND Changing the source of transmission in half-duplex communications. z LOGICAL OPERATION Any of several operations that manipulate information according to the rules of logic (e. g., AND, OR, NOT, and exclusive OR). z LM Abbreviation for linear motion. z LOAD The weight applied to the end of the robot arm. G-12 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z LOCKOUT Serving to prevent operation of a device or part of it. z LSB Abbreviation for least significant bit. M z MANIPULATOR Another term for the mechanical portion of the robot system. z MACHINE LANGUAGE A low-level computer language, usually written in binary code. z MASS-STORAGE DEVICE An input/output device that retains data input to it. Examples include: hard disk drives, magnetic tapes, floppy diskettes, and disk packs. z MECHANICAL UNIT robot (excluding controller) z MEMORY An area of the computer which stores data, either permanently or temporarily. When a program is requested, it is first loaded into memory so it can be accessed quickly by the processor. z MHz Abbreviation for magahertz. One million cycles per second. z MIRROR IMAGE A process which converts the positive and negative values of a taught path from a right-handed robot to a left-handed robot, or vice versa. The actions of the opposing robots are then coordinated and synchronized. z mm Abbreviation for millimeter. z MNEMONIC A term used to help the operator remember a large string of words or commands. z MODEM A signal conversion device that modulates and demodulates data into an audio signal for transmission. z MOMENT OF INERTIA Used to calculate end of arm tooling and handling weights. The sum of the products formed by multiplying the mass of the load by the square of the distance from the tool mounting flange. z MONITOR PROGRAM An administrative computer program that oversees operation of a system. The AS monitor accepts user input and initiates the appropriate response, follows instructions from user programs to direct the robot, and performs the computations necessary to control the robot. z MSB Abbreviation for most significant bit. KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-13 Glossary z msec Abbreviation for millisecond (0.001 seconds). N z NOISE Any unwanted disturbance within a dynamic, mechanical, or electrical system. z NULLED An electrical zero state. O z OCTAL NUMBER A numeral in the base-8 numbering system, which uses the numerals 0-7. z OFF LINE A state in which communications between two devices cannot occur (e.g., between a printer and a computer, if the printer is off line). z ON LINE A state in which communication between two devices can occur. z OPERATING SYSTEM A set of system tasks and commands that are entered by the operator and interpreted and performed by the system. z OPEN LOOP A control which does not use feedback to determine its output. z OPERATOR Any mathematical action or function. The arithmetic operators are: add, subtract, multiply, divide, modulo, and exponentiate. The relational operators are: greater than, less than, equal to, and their combinations. The logical operators are: AND, OR, exclusive OR, negate. The binary logical operators are AND, OR, exclusive OR, ones complement. z OPTO An optical isolator or level converter. z OVERFLOW When a value or buffer exceeds a predefined limit. z OVERTRAVEL An error condition that exists when the robot exceeds its normal software limit values, and then actuates an overtravel limit switch. z OVERVELOCITY When an axis exceeds a preset value for velocity. z OX(OUTPUT EXTERNAL) Information transferred from the robot controller through output modules to control output devices. G-14 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-15 Glossary P z PARITY Method by which errors are detected. In this method the combined binary values of a byte are flagged as 1 or 0. z PARSE To break a command string into individual elements, so it can be interpreted. z PASSWORD A code, entered by the user, to permit access to protected information. z PAYLOAD The maximum weight that a robot can handle satisfactorily during its normal operations and extensions. z PC PROGRAM PC is an acronym for process control. A PC program cannot contain any step that causes robot motion. PC programs are used to evaluate logic and variables and execute program CALL and GOTO commands. z PERIPHERAL DEVICE Hardware equipment which is external to the CPU, but that transmits and/or receives I/O from the processor. Examples include: printer, CRT screen, or disk. z PHASE The angular relationship between current and voltage in alternating current circuits. In a waveform or period function, the fraction of the period that has elapsed, as measured from a reference point. Phase angle is determined by multiplying the phase by 360 degrees. z PINCH POINT Any point where it is possible for a part of the body to be injured between the moving or stationary parts of a robot and the moving or stationary parts of associated equipment, or between the material and moving parts of the robot or associated equipment. z PLA Acronym for programmable logic array. Used in many servo drive circuits. z PLAYBACK An operation where a taught path is run for evaluation purposes. z PLC Acronym for programmable logic controller. Usually referred to as the cell module controller. z POINT-TO-POINT A robot motion control in which the robot can be programmed by a user to move from one position to the next. The intermediate paths between these points cannot be specified. z POLARITY KEYS These teach pendant or multi function panel keys allow the user to hog or slew the robot in the Joint, Base (XYZ), or tool coordinates system. z PORT The connection point of an opening or passage that is usually located outside the housing of a divice. G-16 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z POSITIONAL DATA The location in space of the robot manipulator. z POUNCE POSITION A positional location at a point near the workpiece, clear of the transfer mechanism and part, from which the robot is ready to begin production. z PRINTED CIRCUIT An assembly of electronic elements that provide a complete path of electrical current through conductive material deposited between terminals on an insulated surface. z PRECISION POINT The play back of robot location based on the angular position of the six axes, joint angles. z PRINTING A process in which characters are stamped on a surface, usually paper. z PROGRAM A predefined, step-by -step of instructions that are entered into a computer so a specific process can be performed repeatedly without re-entering all the steps. Robot paths are stored and run as part of programs. z PROGRAM EDIT Modification of an existing program. z PROCESSOR Generally, any hardware or software system for carrying out programs and acting on data. z PULSE WIDTH MODULATION(PWM) A modulation process in which the instantaneous sampling of the modulating wave is caused to modulate the duration of the pulse. This type of modulation is also referred to as pulse duration modulation (PDM), or pulse length modulation (PLM). R z RAM Acronym for random access memory. An area used by the CPU for processing and temporarily loading programs so they can be accessed quickly. The contents of RAM are lost when the computer is powered down, unless battery backup is provided. z REAL NUMBER A number with a fractional part, such as 1.75 ∼ -61.89, .5, -4.00, etc. z REAL-TIME The actual time during which the computer analyzes and processes data : information is usually processed as it is received. z REAL VARIABLE AS language term for a variable that has had a real value assigned to it. z REPEAT MODE A mode of operation that allows the user to check positional and auxiliary information at a selscted speed value, in a continuous or a step by step type of movement of the mechanical unit. KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-17 Glossary z REPEATABILITY The measurement of the closeness of agreement among repeated measurements of the same variable under the same conditions. z REWRITE MODE A mode of operation which allows the user to rewrite positional, or auxiliary data, and to insert or delete step address locations. z RISC Acronym for reduced instruction set computer. z ROM (read-only memory) A memory device which is programmed at the factory and whose contents thereafter cannot be altered. z RS-232C An ASCII specification for connections and communication between serial devices. z RUN A mode of operation that allows the user to select servo motor power to provide drive energy to the robot, allowing it to perform such modes of operation as teach, check, repeat, and rewrite. S z SAFETY PLUG A device used with safety fencing to interlock the opening of the fence with the removal of power to the robot. z SCROLL When more information exists than can be displayed on one screen, the operator can move up and down through the data to view it. When data is scrolled to the screen, the information previously viewed moves up off the screen, and new information enters the screen from the bottom. z SENSOR A device used to detect various conditions: proximity, heat, pressure, etc. An electrical signal from the sensor can be used to communicate information to a robot program. z SERIAL A method of transmitting data by which only one bit is sent or received at any one point in time. z SEQUENTIAL ACCESS A method used by many computers whereby data is read in the order in which it is physically stored. z SINGULARITY POSITION When the robot is processing a linear or circular move and two or more joints are in alignment. The CPU can not process the ambiguity of a singularity configuration and an error is generated. z SOFTWARE LIMITS Programmed values that are included in a program at the point before a mechanical device hits an overtravel limit switch or a hard limit. z SOFTWARE A set of written programs and instructions that are executed by a computer system. G-18 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary z SOURCE CODE A program that contains the actual software instructions entered by the user, in contrast to object code which is source code that has been translated into a language which can be interpreted by the computer. z STRING A series of characters that have been entered in a distinct sequence that can be interpreted as a valid statement or command. z STROKE The movement in either direction of a mechanical part having a reciprocating motion. The entire distance passed through in such movement. z SUBSCRIPT A set of numbers that identifies an element of an array. z SUBROUTINE A set of instructions that is run by another routine. z SYMBOL A character or design that has a distinct meaning and/or is associated with something. z SYNTAX The proper way in which commands and phrases should be typed in order to be understood by the control system. If the operator incorrectly types a command (i.e., misspelled or invalid characters), a syntax error message will be displayed. z SYSTEM DATA Data that is specific to a individual robot. Zeroing data, upper and lower software limits, and software switch setting are all examples of system data. z SYSTEM SWITCH Software switches that are set to determine various configurations and characteristics of the robot system performance. T z TEACH MODE A mode selected on the operator panel, during which robot arm axes positions can be taught by the operator and are recorded by the robot. z TEACH PENDANT A hand-held, portable device used by the operator during teach and jogging operations. z TOOL COORDINATES A Cartesian coordinate system in which the origin point is at the face plate of the robot and the orientation of the tool can be expressed in terms of a 3-dimensional space representation of X, Y, and Z projections. z TOOL MODE A mode of operation in which all motions are calculated to maintain the orientation of the tool in space. KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-19 Glossary z TORQUE Something which produces or tends to produce rotation or torsion and whose effectiveness is measured by the product of the force and the perpendicular distance from the line of action of the force to the axis of rotation. z TRANSFORMER A device to convert the current of a primary circuit into variations of voltage and current used in secondary circuits. z TRANSFORMATION A mathematical description of a location that defines the position and orientation of the location without regard for the configuration of the robot when it is at that location. z TRAP POINT see pinch point. z TTL Acronym for transistor-transistor logic. z TWO’s COMPLEMENT A means of representing a negative number as one more than the binary complement of the absolute value of the number. z TRIANGULAR WAVEFORM A waveform that has the shape of a triangle and is used in determining sampling values for servo drive circuits that utilize pulse width modulation. U z UHF Acronym for ultra-high frequency. V z VARIABLE The name of a memory location or stored value. A variable can refer to a scalar or an array. z VELOCITY COMMAND This analog signal is directly proportional to motor speed, and provides the initial signal that is processed by the servo drive system to drive a servo motor. z VELOCITY ERROR When the robot controller detects an axis that has exceeded a preset value for velocity, the robot controller will E-stop the robot. z VOLT A unit of electrical potential difference and electromotive force. One volt is equivalent to the force required to produce one amp of current through one ohm of resistance. G-20 KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL Glossary W z WORK ENVELOPE The effective range or reach of a robot’s axes. z WORLD COORDINATES A Cartesian coordinate system in which the origin points is near the base of the robot, and robot movement can be expressed in terms of a 3-dimensional space representation of X, Y, and Z projections. z WRITE In computer systems, a process in which information is output to and stored by a device or area in memory. z WS (WELD SCHEDURE) Data that is stored in the weld controller and provides the specific current, clamp pressures, etc. for spot welding applications. z WX (WAIT EXTERNAL) The wait external signal is one of many inputs that are processed by the robot controller. When the robot encounters a wait external condition, the robot will cease motion and the servo power will be removed. Z z ZEROING This procedure provides the robot controller with encoder data that is referenced from a known mechanical position (zeroing witness marks, in simple zeroing, or inclinometer values in precision zeroing) and then establishes an encoder value for this known position. Two methods can be used, simple and precision zeroing. Some robot manufactures call this procedure mastering or calibration. KAWASAKI ROBOT C3✻/C4✻/C70/A80 Controller INSTALLATION & CONNECTION MANUAL G-21 INTRODUCTION UNIT 1 SAFETY UNIT 2 RIGGING/LIFTING/MOVING INSTRUCTIONS UNIT 3 INSTALLATION OF ROBOT CONTROLLER UNIT 4 MULTI FUNCTION PANEL CONNECTIONS UNIT 5 WIRING INSTRUCTIONS APPENDIX GLOSSARY INDEX KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL IN-1 Index 1FR/1GW Board, 5-31 1GB Board, 5-21 1HW Board. 5-31 A AC Servo, I-3 B Bolt Holes, Brakes, 3-5 2-4 C Casters, 2-4 Circuit Breaker, 5-4, 5-5 Connecting Diagram for Limit and Proximity Switches, Connection of Mains Power, 5-4, 5-5, 5-6 Controller Design Specifications, Controller Variations, I-6 Conversion Formula, A-7 5-30 I-3 D Data Plates, 3-3 Dedicated Signals, Dimensions, I-4 I-5 E Emergency-Stops, Error Messages, 1-9 I-5 F F-Series Sensor Cable, 5-28 Front and Left Side View, I-7, I-9, I-11 FS02/03 and FC02 Sensor Cable, 5-29 Function Diagram, Limit Switch, 5-30 Function Diagram, Proximity Switch, 5-30 G General Purpose Signals, Grounding Terminal, IN-2 5-31 5-3, 5-4, 5-5, 5-7 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL Index H Harness Connections, 5-10, 5-18 I Input Signals, 5-30 Interface Connection, 4-3 J Js30 and Js40 Sensor Cable, Js5/JC5.Js10 Sensor Cable, 5-25 5-24 Jumper Configuration for Sensor Cable Usage, 5-31 L Lifting Controller, Lifting Sling, 2-3 2-3 Lifts up by the Crane, Limit Switches, 2-5 5-30 Line Voltage, 5-3 M Mains Power Supply, Mass, 5-3 I-5 Memory, I-3 Motion Control, I-3 Moving Controller on Casters, Multi Function Panel, 2-4 I-15, 4-3 N Noise Filter, 5-6, 5-7 P Permanent Mounting Procedure, Personal Safety, 3-5 1-4 Personnel Safety categories, 1-4 Positioning the Robot Controller, Power Requirements, Power Supply Specifications, Proximity Switch, 3-4, 3-6 I-5 5-3 5-30 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL IN-3 Index R Rear and Right Side View, Robot Controller, I-8, I-10, I-12 I-3 S Safety, 1-3 Safety During Inspection and Maintenance, Safety During Operation, 1-6 Safety During Programming, Safety Features, Sensor Cable, 1-7 1-9 5-24 Sensor Cable Connection, Sensor Signal Inputs, Sensor Signals, 5-24 5-31 5-31 Sensor Wiring Diagrams, 5-32 Solenoid Valve Wiring Diagram, Speed, 1-9 5-39 I-3 Switch/Breaker, T Torque Value, Transformer, A-16 5-8 Transportation with Two Persons, 2-5 U UD100/150 Sensor Cable, 5-26 W Wall Clearance, 3-4, 3-6 Wire harnesses, 5-10 Wire Specifications, 5-3 Wiring Instructions, 5-3 Z ZD-Series Sensor Cable, IN-4 5-27 KAWASAKI ROBOT C3✻/C4✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL KAWASAKI ROBOT CONTROLLER C3✻ ✻/C4✻ ✻/C70/C80 Controller INSTALLATION & CONNECTION MANUAL October 1998 : 2nd Edition March 2001 : 7th Edition Publication : KAWASAKI HEAVY INDUSTRIES, LTD. ROBOT DIVISION 90202-1031DEG All rights reserved. Copyright 2001 KAWASAKI HEAVY INDUSTRIES, LTD. Kawasaki Robotics (UK) Limited Kawasaki Robotics GmbH Kawasaki Robotics (USA), Inc. Kawasaki Heavy Industries, LTD. Tokyo Head Office Kawasaki Machine Systems Korea, Ltd. KAWASAKI HEAVY INDUSTRIES, LTD. ROBOT DIVISION KAWASAKI ROBOTICS CO., LTD. Kawasaki Heavy Industries, Ltd. 4-1, 2-Chome Hamamatsu-cho Minato-ku Tokyo, 105-6116 JAPAN (World Trade Center building) TEL 81-(0)3-3435-6908 FAX 81-(0)3-3437-9880 Kawasaki Robotics Co., Ltd. 1-1, Kawasaki-cho Akashi, 673-8666 JAPAN TEL 81-(0)78-921-1565 FAX 81-(0)78-923-0685 Kawasaki Robotics (USA), Inc. 28059 Center Oaks Court Wixom, Michigan, 48393 U.S.A TEL 1-248-305-7610 FAX 1-248-305-7618 Kawasaki Robotics (UK) Limited Greengate, Middleton Manchester, M24 1SA UNITED KINGDOM TEL 44-(0)161-9565400 FAX 44-(0)161-9565404 Kawasaki Robotics GmbH Sperberweg29, 41468 Neuss, GERMANY TEL 49-(0)2131-3426-0 FAX 49-(0)2131-930973 Kawasaki Machine 3FI(307), Industrial Complex Support Bidg., 637 Systems Korea, Ltd. Kojan-Dong, Namdong-Gu, Inchon, 405-310 Korea TEL 82-32-821-6941 FAX 82-32-821-6947 Akashi Works TEL 81-(0)78-921-1560 FAX 81-(0)78-923-6548 1-1, Kawasaki-cho Akashi, 673-8666 JAPAN • All descriptions in this booklet subject to change for improvement without prior notice.