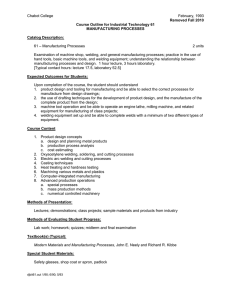
SGUS Advanced Welding Technologies Pte ltd Project Plan Robotic Welding for Handrails Project Sponsor: NTU Simtech Project Manager: SGUS Advanced Welding Grp 3 Department: Engineering Date: 18/2/2021 Group Number: 3 Group Members: Abdul Haris Bin Badaruddin Chong Jun Hua @ Chong Kin Wah Lee Meng Kong Lim Lee Kuan Trevor Ramzi Bin Hashim Timothy Richard McIntyre Wong Man Ming Simon 1 Project Summary Page Expecting increasing demand, SGUS Advance welding Pte Ltd is looking for automation solution for fabricating a range of guard railing frames. Among the series of the fabrication processes, from beam members preparation, cutting, grounding, fitting, welding, and inspection, welding is identified as the “hot-spot” for automation. We are building a feasibility study to build a robotic system that can increase our production by 300% and improve weld quality with 0.5% rejection rate and ability to bid for high specifications projects. Project objectives: 1. The objective of this project is to develop a robotic welding system that will increase the production of the handrail frames by at least 300% by the end of September 2021. 2. Reduce the cost of the product by 20% by benefiting from process 3. Reduce reliance on manual welders in tight labour supply situations by 80 % using robotic automation. 4. Increase the quality and consistency of the final deliverable product with rejection rate from 5% to 0.5% so as to be able to tender for higher precision, high-specification,and higher margin projects. Final deliverables: 1. Robotic MIG welding system 2. Operation manual 3. Maintenance manual 4. Annual preventive maintenance programme Project start date & end date: Start: 1 Mar 2021 End: 27 Sep 2021 List of major milestones: Project Approval: 1 Mar 2021 2 Overall Design Completion: 14 Jun 2021 Testing and Commissioning: 20 Sep 2021 Total budget: Total budget is 250k Project team: Abdul Haris Bin Badaruddin Chong Jun Hua @ Chong Kin Wah Lee Meng Kong Lim Lee Kuan Trevor Ramzi Bin Hashim Timothy Richard McIntyre Wong Man Ming Simon Project background Expecting increasing demand, a local metal structure fabrication company is looking for automation solution for fabricating a range of guard railing frames. Among the series of the fabrication processes, from beam members preparation, cutting, grounding, fitting, welding, and inspection, welding is identified as the “hot-spot” for automation. The objective is to increase the productivity by eliminating the manual welding process (Figure 1) while improving welding quality. Figure 1 3 The railing frames that the company wants to fabricate are the handrails and fences (Figure 2, 3 & 4) for protecting workers and pedestrians in industrial sites and roadsides. The volume is high, and the configuration variety is also high. In other words, it is a high volume and high mix type of manufacturing. Figure 2 Figure 3 Figure 4 The welding for connection joints of handrails is considered as most time consuming task in the whole process. Firstly, the welding path of these 3-dimensional geometric joints are very complicated and various for different diameter of pipe combinations and angle of the components of the joints (Figure 5 & 6). Secondly, it demands the highest skill of welders for these joints comparing with the typical flat, horizontal or vertical weld joints. Under the current pandemic situations, the shortage of skillful welders poses the challenge for the company to fulfil the production schedules. Figure 5 Figure 6 The brief fabrication steps are as follows: a. Measure and cut beam / bar members b. Machine and grind the joints to required geometric dimension and tolerance c. Position be frame in a template or fixtures d. Tack weld or fasten the beam members to hold the member in the required positions e. Weld the joints in full length (Targeted process for this project) f. Remove the finished frame from the welding station 4 Project Objectives 1. The objective of this project is to develop a robotic welding system that will increase the production of the handrail frames by at least 300% by the end of September 2021. 2. Reduce the cost of the product by 20% by benefiting from process 3. Reduce reliance on manual welders in tight labour supply situations by 80 % using robotic automation. 4. Increase the quality and consistency of the final deliverable product with rejection rate from 5% to 0.5% so as to be able to tender for higher precision, high-specification,and higher margin projects. Project scope The robotic system must be able to produce the handrails of the following specification: ● ● ● ● Precision to +/- 1 mm tolerance Rail size < 1.5 m x 3 m Rail configuration in T, K and Y joint types Quantity > 300 per month Exclusion ● ● ● ● Fluctuation of subsequent part price Expansion plan and volume of demand Fully Automated system CNC cutting of rails tubes The major components of the required robotic welding system are listed as follows: 1. Arc Welding System 2. Fixture for the Handrail Assembly 3. Robotic System 4. Robot Teaching and Sensing Parts Assumptions 1. Ability to train up or hire qualified operators to operate Robot safely & productively. 5 2. Contractor is able to manufacture the components and parts meeting the specification and delivering them on schedule. 3. Economy situation is in Singapore 4. Communication Plan for project is in place Constraints ) 1. 2. 3. 4. 5. 6. Ability to retrain existing staffs to learn new skills Limitation of suppliers to ensure best value for the investment Budget limitation for cost effective ROI implementation . Workspace Space planning & Workflow constrain to meet worksafe environment The waterfall model approach will require a longer time and personnel coordination Getting certified operators Project approach/methodology We will adopt the waterfall model, which is a linear project management approach, where stakeholder and customer requirements are gathered at the beginning of the project, and then a sequential project plan is created to accommodate those requirements. The waterfall model is so named because each phase of the project cascades into the next, following steadily down like a waterfall. 6 List of milestones Milestones Description Planned Date 1 Project approval 1 Mar 2021 2 Completion of overall design 14 Jun 2021 3 Arrival of all key components 9 Aug 2021 4 Completion of testing and commissioning 20 Sep 2021 5 Robot start production 27 Sep 2021 Deliverables and requirements 1. Robotic welding system of the following specification: a. Overall dimensions range of guard railing frames: Length 1 m to 3 m; Height: 500 mm to 1500 mm b. Joint type: T, K or Y configurations c. Tolerance requirement of finished frame: +/- 1 mm d. Members diameters: 25 mm to 65 mm e. Materials: Mild Steel, Stainless Steel, Aluminum f. Welding processes: Arc Welding g. Number of passes: one h. Production volume: Over 300 pieces frames per month (3 times of current) i. Batch size: 10 to 200 pieces per batch 2. Operation manual 3. Maintenance manual 4. Annual preventive maintenance programme 7 Acceptance test and criteria Production dept will be signing off the acceptance test and the new robot system is able to run in parallel with the existing manual process and collected data shows the new system achieving 300% productivity improvement defined in the project goals. Work breakdown structure WBS Dictionary ID Activity Resources Total Cost 6.1 Overall Design of robotic system Design Engineer $20k 6.3 Installation of robotic system Project Engineer $40k 6.4 Testing and commissioning Testing Engineer $10k 8 Activity list 1. 2. 3. 4. Upload CAD file of railing into robotic system Install and clamp rail tubes into jig Robot teaching - scan and collect ACTUAL coordinates of rail and weld points Synchronise the scanned data with CAD data - adjust/compensate for discrepancies between CAD coordinates and actual coordinates 5. Dry run (and if no issues, perform welding) 6. Welding ( For duration of activities , please refer to Gantt Chart) Project schedule 9 Project risk management (Haris) ● ● ● ● Risk breakdown structure Risk levels for probability and impact Probability/Impact matrix Risk register Probability/Impact matrix 10 Risk register Risk # Risk Description (eg risk, cause & effect) Risk Category Probability Impact RPN Strategy Mitigation 1 Supplier End of life product for effective use and parts Commercial 3 4 12(H) Mitigate Source for second suppliers from china Contingenc y Plan Risk Trigger Risk Owner Status Opened Haris Finding model sold and countries available 2 Financial Internal 3 3 P(M) Accept (active) Second-hand acceptance impact Internal 3 4 12 (H) Mitigate Implement risk assessment program regulation 2 2 4 Accept acceptance test from MOM ROI Risk 3 Safety Risk Govt risk 11 Gloomy economy inspecto r Ramzi Opened Haris Opened william opened Project resources Resource breakdown structures RBS Chart 12 Budget Budget breakdown table Budget Breakdown Name of Items Manpower Budget-Total (SGD) Research & Development 30,000 Engineering 30,000 Commissioning 10,000 Training 5,000 Total Manpower Equipment 75,000 Procurement of Robot & Robot Programming 100,000 Procurement of Welding Machine set 20,000 Procurement of SemiAutomated Fixture 50,000 Total Equipment Materials 170,000 Feeder Wires 4,000 Consumables 1,000 Total Materials 5,000 13 Actual-Total (SGD) Total Project Cost 14 250,000