Modeling and Simulation of Offshore Wind Farm Installation with Multi-Leveled CGSPN Approach
Shengrui Peng, Helena Szczerbicka
L3S Research Center, Leibniz University Hanover
Hanover, Lower Saxony, Germany
Matthias Becker
Human-Computer-Interaction Group, Leibniz University Hanover
Hanover, Lower Saxony, Germany
ABSTRACT
This work presents a multi-leveled model based on Colored Generalized
Stochastic Petri nets (CGSPN) approach for offshore wind energy
installation. The offshore logistics, which describes the organization of
offshore operations, is embedded at the root level. The offshore
operations, e.g., loading and sailing, are implemented at the secondary
level using sub-models. The large scale of the wind turbine components
and the ever-changing offshore weather conditions make the scheduling
difficult. The aim is to support the project operators and managers in
making decisions with the knowledge of the system behavior obtained
through stochastic simulation, in which historical weather data measured
on the German North Sea from 1958 to 2007 is used. The numerical
results show the influence of decision variables, e.g. initial inventory, on
a designed offshore wind farm with a size of 80 wind turbines.
KEYWORDS: Offshore installation, multi-leveled modeling, colored
generalized stochastic Petri nets, data-driven simulation
INTRODUCTION
The public awareness of using renewable energy sources is growing, due
to the deteriorating environmental problems caused by the utilization of
non-renewable energy sources, such as petroleum, which contributes
36% to the U.S. total energy consumption in 2018 (EIA, 2020). Since
2011, Germany's federal government has been working on a new plan
for increasing renewable energy commercialization, with the aim of 8095% renewable electricity supply by 2050 (BMWi, 2019). This global
trend of using green energy has given scientists and engineers the
motivation to investigate and develop wind energy techniques in recent
decades. Besides, there are more and more offshore wind farms, which
have been planned and constructed worldwide, due to the limitation of
the land and higher quality of wind source on the sea. Even though wind
energy techniques have been investigated and developed intensively over
the last decades, the number of works, which have been done for offshore
installation logistics, is relatively low compared to other areas, such as
offshore operation and maintenance. However, offshore installation is
one of the most costly parts of the offshore industry (Bilgili, et al. 2011).
Up to 175 offshore wind turbines (OWTs) can be planted in an offshore
wind farm (OWF) and even larger projects are under construction or have
been proposed worldwide to meet the demand (Wikipedia, 2020). This
tendency leads the offshore installation to a severer situation since the
construction of an OWF can be spread into several years. It increases
directly the rental, which is spent on the buffer place and vessels, and the
payback period. It is also more difficult to deal with the changeable
weather. These problems can be alleviated by planning and scheduling
the offshore installation wisely. In this work, we focus on the offshore
installation planning on the global level, e.g., optimizing buffer size. The
effects of planning and scheduling on the local level, such as the number
of OWTs loaded onto the installation vessel in each installation cycle,
are discussed here.
This work aims at determining the influence of initial inventory, and
minimal inventory on the offshore wind energy installation and
discovering the optimal combination of them through investigating the
system behavior of the offshore installation process. This should help the
planners to optimize their plans. In this work, we present a multi-leveled
model base on Colored Generalized Stochastic Petri nets (CGSPN) for
the offshore installation process. On the root level, the conventional
logistic concept is implemented. The operations of the offshore
installation process are simulated on the secondary level through submodels with corresponding parameters. This work presents two
prototypes of the sub-model, which are extendable and modifiable. The
stochastic parameters are derived by using historical weather data
measured on the German North Sea from 1958 to 2007.
LITERATURE REVIEW
In the past, most studies on offshore wind turbines (OWTs) in the
offshore wind energy industry concern technical challenges in design,
manufacturing, and operation and maintenance (O&M) of the facilities.
For example, Besnard and Bertling (2010) and Besnard, et al. (2013)
have made efforts in investigating scheduling problems in offshore
O&M. A review of the offshore O&M logistics is given by Shafiee
(2015). Dinwoodie, et al. (2015) have proposed a cross-validation
strategy to verify the existing O&M models by using reference cases and
benchmarks.
Comparing to the other aspects, only a few works have concentrated on
the offshore installation phase. Among those, Aas, et al. (2009) have
explored the importance of supply vessel to the offshore installation
process. Tyapin, Hovland and Jorde (2011) have dealt with weather
downtime and operational time during the single turbine installation by
comparing two methods based on Markov theory and Monte Carlo
simulation. Oelker, et al. (2018) have proposed a new concept for
offshore logistics to reduce the overall cost of an OWF project.
Essentially, mathematical approaches have been applied to model the
offshore installation process to solve the planning and scheduling
problems by the majority of the researchers. The mixed-integer linear
programming (MILP) model proposed by Scholz-Reiter, et al. (2010)
aims at scheduling offshore installation activities under the consideration
of a single weather scenario. Based on which, Ait-Alla, et al. (2013) have
extended the model and provided an aggregate planning strategy for
minimizing the installation cost. A more detailed categorization for
weather conditions has been made. Rippel, et al. (2019b) have embedded
the MILP mode into the model predictive control scheme to cope with
the weather conditions in a realistic environment. However,
deterministic weather conditions and operational time have been taken
into account in these works. Regardless, there exist several works that
have considered uncertainties. Herroelen and Leus (2005) review the
fundamental approaches for scheduling that consider uncertainties, e.g.
stochastic project scheduling, fuzzy project scheduling. Santoso, et al.
(2005) have proposed a stochastic programming approach to solve
design problems in the supply chain network. Cardoso, et al. (2013) have
introduced uncertainty of products’ demand into their MILP model for
the designing and planning of the general supply chains with reserve
flows. A decomposition strategy proposed by Ursavas (2017) aims at
improving the planning and scheduling to reduce the cost resulted from
the severe weather condition. It aims at mitigating the risks caused by
offshore weather conditions.
A few authors have also proposed models based on discrete-event
simulation (DES) method to investigate problems in the offshore wind
industry. Endrerud, et al. (2014) have presented a logistic model that
combines the agent-based and DES modeling paradigms to analyze the
O&M life cycle phase. Vis and Ursavas (2016) proposed a decisionsupport tool based on DES to investigate the coherency between the
logistical concepts and project performance. Muhabie, et al. (2018) have
investigated the assembly strategy used in the offshore installation by
DES approach that includes weather uncertainties, distances, vessel
properties, and different assembly scenario. A review of the studies on
offshore logistics is by Chartron (2019). It points out that offshore
installation is strongly dependent on the season and geographical feature
on the construction site, and suggests to combine different logistic
strategy to achieve the best performance.
This paper contributes to the literature in several senses. First, it
incorporates both meteorological and operational time uncertainties
reflecting the industry-specific features. Second, a new model using the
Colored Generalized Stochastic Petri nets (CGSPN) approach is
implemented, which belongs to the DES category. Last but not least, it
fills the gap in the literature that the importance of buffer size and
minimal inventory hasn’t been discovered.
OFFSHORE INSTALLATION
Practically, OWT installation can be roughly divided into five phases:
supply, installation of foundation structures and piles, the embedding of
electricity cables, installation of top structures and commissioning. The
sub-processes are also named as sequences because they have to be
accomplished in the left-to-right order. In the literature different
combinations of sub-processes have been investigated. In Ait-Alla, et al.
(2013) and Muhabie, et al. (2015), the authors have considered the
installation of foundation, electricity cable and top structure in their
models. Comparing to this approach, another bunch of works chose to
focus only on the installation of the top structure (Oelker, 2017; Vis and
Ursavas, 2016). Hereinafter, the latter approach is considered, due to the
restriction in the execution order and the similarity in the logistics.
Offshore Logistic Concepts
The offshore logistic concepts describe how the components (e.g. piles,
blades, etc.) are transported from manufacturers to the construction sites,
i.e. OWF, and constructed. Rippel, et al. (2019a) have summarized the
existing offshore logistic concepts into two categories: conventional and
innovative concepts. The conventional concept is the most used one in
the industry, due to the flexibility provided by the base port. The
components are transported from the manufacturers to the base port and
stored there firstly. The transportation and construction are accomplished
by the installation vessel, which can be loaded with components for up
to four OWTs and equipped with a crane for the lifting operations. If an
admissive weather condition has been predicted or confirmed, then the
loaded installation vessel ferries to the construction site and builds the
components one after another. Besides, transportation vessels, which sail
back and forth between base port and manufacturers, are used for the
supplementation of components. The advantage of this concept is that
the base port gives a buffer to the installation process and decouples the
supplementation to the offshore installation. The main drawback of this
concept is the high rental cost resulted from the usage of the base port.
In the literature, there is a group of innovative concepts, of which the
general idea is to reduce the overall cost by removing the base port
Oelker, et al. (2017). The main drawback of this approach is the lack of
flexibility. It requires that the supply always to be just-on-time, which
will normally lead to delay of the OWF installation. Thus, it is seldom
applied in the industry. Ait-Alla, et al. (2017) have compared the
innovative concept with the conventional ones, where the results show
that the innovative concepts can reduce the total cost up to 10% for an
OWF with small to moderate size (under 40 OWTs). However, this
economic improvement decreases with the growing size of the OWF.
Thus, in the following, we focus on the conventional logistic concept as
the most utilized in the practice.
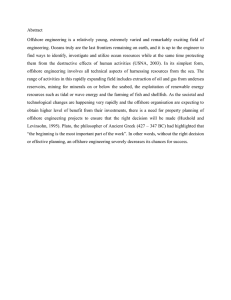
System States and Operations
The offshore installation process consists of five different states mainly:
loading, sailing forward, installation, reposition and
sailing back, which are depicted as a directed graph in Fig. 1. Each state
represents the corresponding operation, except that the state consists
of three operations: jack-up, construction and jack-down due to the
different weather dependencies.
been applied in various areas, for example, modeling and analysis of
distributed systems. Later, the notion of time and stochastics has been
introduced into the original PN theory, which led to the Generalized
Stochastic Petri nets (GSPN) approach. This has given the possibility to
PN for performance evaluation (Marsan, et al. 1995). Furthermore, the
Colored Petri nets (CPN) approach has extended the original PN theory,
where information is attached to tokens. In this case, the tokens are
thought to be colored (Jensen, 1987). In Huber, et al. (1989) the CPN
approach is extended with further functionality, e.g. inhibitor arcs. For
more details of the CPN approach, the author recommends Jensen and
Kristensen, (2009). A CGSPN model is defined as a 14-tuple according
to Marsan, et al. (1995), and Jensen and Kristensen, (2009) as follows
Figure 1. States of offshore installation
Weather Restrictions
𝑴𝒄𝒈𝒔𝒑𝒏 = {𝑃, 𝑇, 𝐴, 𝛱, 𝐾, 𝐷, 𝑀, 𝑊, Σ, 𝐶, 𝑁, 𝐸, 𝐺, 𝐼𝑛𝑖},
Technically, the optimal wind speed, vopt, of a 5 MW OWT to generate
electric power is between 14 m/s and 25 m/s (Cutululis, et al. 2012).
However, it becomes critical for the offshore wind energy installation
when the wind speeds exceed 14 m/s. Harsh offshore weather conditions
affect the installation process in two main ways. First, it is the major
reason for project delay (Sørensen, et al. 2001). Second, it can cause
damage to the OWT components that are very expensive and sensitive to
wind speed (Sun, et al. 2012). In the literature, various authors have tried
to cope with offshore weather conditions by classifying them into
different categories. Vis and Ursavas, (2016) have used the offshore
wind velocity, 𝑣, as the indicator to classify the weather restrictions
roughly into three levels: 1). lifting operations if 𝑣 ≤ 10 m/s ; 2).
shipments if 𝑣 ≤ 16 m/s; and 3). no actions if 𝑣 ≥ 16 m/s. Ait-Alla, et
al. (2017) have not only classified the weather conditions into more
categories but also considered the significant wave height. A similar
weather classification can be found in Quandt, et al. (2017). The weather
restrictions on the offshore installation operations with their abbreviation
used in this work are given in Table 1.
Table 1. Offshore weather restrictions on operations
Operation
Loading
Abbrev.
vmax
in (m/s)
hmax
in (m)
L
-
-
Sailing Forward/ Back
SF/SB
21
2.5
Jack-up/ Jack-down
JU/JD
14
1.8
Construction
C
10
-
Reposition
R
14
2
Sup
-
-
Supply
vmax: maximal allowed wind speed; hmax: maximal allowed significant
wave height.
(1)
where 𝑃 is a finite set of places representing the conditions. 𝑇 is a finite
set of transitions, that consists of a finite set of immediate transitions 𝑇𝐼
and a finite set of timed transitions 𝑇𝑇 , 𝑇 = 𝑇𝐼 ∪ 𝑇𝑇 , 𝑇𝐼 ∩ 𝑇𝑇 =
∅. Besides, it holds 𝑃 ∩ 𝑇 = ∅. The set of directed arcs, 𝐴, consists of
the set of input arcs I, the set of output arcs O, and the set of inhibitor
arcs H. The function 𝛱 maps transitions in 𝑇 to a number in ℕ that
represents their priority levels, i.e. the greater the number the higher the
priority. Among all, the immediate transitions have the highest priority.
The tokens, depicted by dots, are associated with places and the
movement of these tokens represent the dynamic behavior of the system.
𝐾 is a set of parameters assigned to places, i.e. place p contains 𝑘 ∈ 𝐾
tokens. The domains of parameters, 𝑘𝑖 ∈ 𝐾, are defined in the set 𝐷.
Marking 𝑀 is a function that maps places to natural numbers. The
number of tokens in place, 𝑝𝑖 , in marking M is denoted as 𝑀(𝑝𝑖 ). The
parametric initial marking, 𝑀𝐾 , is a function that maps places, 𝑝 ∈ 𝑃,
into either a natural number, ℕ, or a parameter, 𝑘 ∈ 𝐾, ranging on the set
of natural numbers. 𝑊: 𝑇 → ℝ is a function defined on the set of
transitions, which maps transitions, 𝑡 ∈ 𝑇, into real positive functions,
𝑊(𝑡, 𝑀), of the marking. The value of function 𝑊(𝑡𝑘 , 𝑀) is either the
rate, 𝜆𝑘 , in marking M of a timed transition 𝑡𝑘 ∈ 𝑇𝑇 or weight, 𝑤𝑘 , of an
immediate transition 𝑡𝑘 ∈ 𝑇𝐼 . Σ is the set of color sets, which contains all
possible colors applied in this approach.
𝐶: 𝑃 → Σ represents the color function that maps the places into colors.
𝑁 is the node function that maps 𝐴 into (𝑃 × 𝑇) ∪ (𝑇 × 𝑃) , i.e. to
identify which two nodes are connected by arc 𝑎 ∈ 𝐴 . 𝐸 is an arc
expression function that maps each arc 𝑎 ∈ 𝐴 into the expression 𝑒 ∈ 𝐸.
The input and output types of the arc expressions must correspond to the
type of the nodes the arc is connected to. 𝐺 is the set of guard functions
applied to transitions, which are additional conditions for the enabling
and firing of the transitions. 𝐼𝑛𝑖 is an initialization function. It maps each
place into an initialization expression. In this work, the places can strictly
contain tokens with the same color or token type.
METHODOLOGY
In this section, the methodologies applied in this work are introduced
briefly. First, the Colored Generalized Stochastic Petri nets (CGSPN)
approach is used to model the offshore installation process. Second, the
discrete uniform distribution is considered to describe the randomness of
the operation durations.
CGSPN Approach
The offshore installation process is modeled using the CGSPN approach
because of the ability to represent actions and conditions necessary for
the execution of actions. In general, Petri nets (PN) have been considered
as a graphical tool suitable for describing systems, which are
characterized as being concurrent, asynchronous, distributed, parallel,
nondeterministic and/or stochastic (Murata, 1989). The PN approach has
Due to the restriction made in initialization function, the states of a
CGSPN model with m places can be given by its markings as follows
𝑀 = {𝑀(𝑝1 ), … , 𝑀(𝑝𝑖 ), … , 𝑀(𝑝𝑚 )}.
(2)
Moreover, the firing of transition 𝑡 gives dynamics to the system, i.e. the
system moves from state 𝑀𝑖 to the next reachable state 𝑀𝑖+1 , by
removing the tokens from the input places of transition 𝑡, 𝐼(𝑡), and
adding tokens to its output places 𝑂(𝑡)
𝑀 𝑖+1 = 𝑀𝑖 + 𝑂(𝑡) − 𝐼(𝑡).
(3)
A transition must be enabled before it can be fired. Fundamentally, a
transition is enabled in a marking 𝑀, when the following two conditions
are met
∀𝑝 ∈ 𝐼(𝑡), 𝑀(𝑝) ≥ 𝐼(𝑝, 𝑡), and
(4)
∀𝑝 ∈ 𝐻(𝑡), 𝑀(𝑝) < 𝐻(𝑝, 𝑡),
(5)
where 𝐼(𝑡) and 𝐻(𝑡) represent the set of input and inhibitor places
respectively. 𝐼(𝑝, 𝑡) is the multiplicity of the input arc, which points from
a place, 𝑝, to a transition, 𝑡. Analogue, 𝐻(𝑝, 𝑡) is the multiplicity of the
corresponding inhibitor arc. Multiplicity defines the number of tokens
that should be removed from the input places or the number of tokens
that should be added to output places. An inhibitor arc does not lead to
the removal of tokens in the inhibitor places. In this work, the transition
enabling is expanded, since the model is investigated via simulation. A
transition is enabled if and only if it fulfills the conditions (4) and (5),
and additional enabling rules defined by the user, such as a marking
related complex function.
In the CGSPN model, there are two types of transitions: immediate and
temporal transition. An immediate transition, t, has the highest priority,
i.e. it fires first when it encounters a conflict with temporal transitions.
Conflicts between several immediate transitions are solved by using
weights, which are the firing probabilities of enabled immediate
𝑁𝑡
transitions. It holds ∑𝑖=1
𝑤𝑖 = 1 , where 𝑤𝑖 is the weight of i-th
immediate transition in the marking determined by the function
𝑊(𝑡𝑖 , 𝑀) and Nt is the number of enabled immediate transitions in the
conflict. A temporal transition, T, is associated with a firing time, 𝜏,
which can be deterministic or stochastic. Thus, the time interval,
[𝜏𝑖 , 𝜏𝑖+1 ) , between consecutive temporal transitions, Ti and Ti+1, is
equivalent to the sojourn time in state 𝑀𝑖 . If more than one temporal
transition is collectively enabled and these are in conflict with each other,
then the race policy is applied, which means the transition with shorter
firing time, 𝜏, fires first. According to the resampling strategy, the firing
of an in conflicting transition will reset the timer of others to zero. If the
set of collectively enabled transitions is not in a conflict, then the
maximal-step firing policy is applied and all of the temporal transitions
fire at the same time, which allows the transitions to fire at the same time
step (Popova-Zeugmann, 2013).
In this work, sub-models are introduced into the CGSPN approach as a
group of generalized temporal transitions since they follow the general
enabling and firing rules mentioned above. Different from the
conventional temporal transitions, sub-models possess states and the
firing time 𝜏 is evaluated by running simulation on PN models.
Furthermore, tokens in the CGSPN are colored, which means they can
carry and transfer certain information. This is realized through record
token types. The primitive token types are integer, boolean, double,
String and Date. A record token type is an arbitrary combination of
primitive token types and existing record token types (Zimmermann and
Hommel, 1991). A token can be transported to a place only if the token
type is correct.
Exponential Distribution
framework. The elements of the CGSPN approach are depicted in Fig. 2.
The CGSPN model is depicted in Fig. 3.
Place
Input/ Output arc
ln(1−𝐹𝜆 (𝑥))
𝑥
Sub-model
Inhibitor arc
Token types
There are three different token types in the model: Vessel, OWT and
Void. Token type Vessel has two attributes. The integer attribute ID gives
identification to the tokens, i.e. for the cases where multiple installation
vessels are applied in the project. Another integer attribute Capacity
reveals the current capacity of the installation vessel. Token type OWT
has two attributes. The boolean attribute isBuilt describes simply whether
the owt is constructed. The other attribute, builtOn, records the time, on
which the OWT is constructed. A token with the type Void has no
attribute, which is equivalent to an uncolored token in the conventional
PN theory.
Main models
As mentioned, offshore logistics is embedded on the root level. It
consists of eight places and eight sub-models. Each sub-model represents
the corresponding offshore operation. Thus, the states of the main model
are vectors with eight elements given as follows
𝑀 = {𝑀𝐵𝑃 , 𝑀𝑖𝑉 , 𝑀𝑆𝐹 , 𝑀𝐽𝑈 , 𝑀𝐶 , 𝑀𝐽𝐷 , 𝑀𝑅/𝑆𝐵 , 𝑀𝑂𝑊𝐹 },
(7)
where 𝑀𝑖 is the simplification of the notation 𝑀(𝑝𝑖 ) for number of
tokens in place 𝑝𝑖 . For example, 𝑀𝐵𝑃 represents the number of tokens in
place 𝑃𝐵𝑃 . Uppercase letters P, T and S are used to identify places,
transitions and sub-models respectively. The sub-indices are
abbreviations of either physical objects or locations (Base Port (BP), idle
Vessel (iV), Offshore Wind Farm (OWF)) or offshore operations (see
Table 1). This makes it possible to identify the states of the CGSPN
model to the systems states given in Fig. 1
= 𝑀𝐿
𝑀 𝑆𝐹
=
= 𝑀𝐶
= {𝑀𝐵𝑃 , 1, 0, 0, 0, 0, 0, 𝑀𝑂𝑊𝐹 },
(8)
= {𝑀𝐵𝑃 , 0, 1, 0, 0, 0, 0, 𝑀𝑂𝑊𝐹 },
(9)
= {𝑀𝐵𝑃 , 0, 0, 1, 0, 0, 0, 𝑀𝑂𝑊𝐹 } ∧
(10)
{𝑀𝐵𝑃 , 0, 0, 0, 1, 0, 0, 𝑀𝑂𝑊𝐹 } ∧
{𝑀𝐵𝑃 , 0, 0, 0, 0, 1, 0, 𝑀𝑂𝑊𝐹 },
& =
, ∀𝑥 ≥ 0,
Temporal
transition
Figure 2. Graphical illustration of elements in CGSPN model
In this work, the randomness of the operation times is described by using
an exponential distribution 𝐸𝑥𝑝(𝜆). The parameter 𝜆 can be evaluated
with the following equation
𝜆= −
Immediate
transition
𝑀𝑅/𝑆𝐵
= {𝑀𝐵𝑃 , 0, 0, 0, 0, 0, 1, 𝑀𝑂𝑊𝐹 }.
(11)
(6)
where 𝐹𝜆 (𝑥) is the value of the cumulative distribution function (CDF)
of the exponential distribution at 𝑥.
MODEL DESCRIPTION
The offshore installation process is modeled employing the CGSPN
During the simulation, 𝑀𝐵𝑃 and 𝑀𝑂𝑊𝐹 are changing over time, since
they represent the usage of the base port and the number of constructed
OWTs respectively. Thus, they are not essential in identifying the system
states, which are given by the offshore operations. As can be observed
from Equation (11) to (14), the system state changes while the token with
token type Vessel moves from PiV to PR/SB. The installation cycle ends
when the token goes back to place PiV.
Root Level
NOWF
SSup
SL
PBP
8
PSF
SSF
PJU
SJU
PC
SC
PJD
SJD
POWF
4
𝐾𝐵𝑃
𝐾𝑂𝑊𝐹
SR
PR/SB
SSB
PiV
Secondary Level
Sub-model I
Sub-model II
Weather Data
Figure 3. CGSPN Model
Sub-models
Sub-models are introduced as a special type of temporal transition. They
share the enabling and firing rules of conventional temporal transitions,
yet they possess internal states, which are independent of the states of the
main model. When a sub-model is enabled, it receives information about
the current operation and initializes an internal CGSPN model with one
token in place PINPUT. The main model waits for feedback from the
enabled sub-model and change of state occurs when the sub-model fires.
The firing of a sub-model is completed by the landing of the tokens in
the place POUTPUT. Fundamentally, there are two types of sub-models:
sub-model I, which is weather independent, and sub-model II, which is
weather dependent.
Sub-model I The structure of the sub-model I depicted in Fig. 4 is
straight forward, i.e. the token is transported from the left directly to
right. In this work, the processing times are modeled with chained
temporal transitions. The two temporal transitions, 𝑇𝐷 and 𝑇𝑃 , chained
with a structural place element, PHSUB, represent the deterministic and
probabilistic part of the operation time respectively. To include the
uncertainties in the realistic system, the operation time is divided into
two parts. The deterministic part sets the baseline for the operation
duration and the probabilistic part gives randomness to the system, i.e.
the operation duration will be only overestimated. To be specific,
probabilistic transitions are assigned with exponentially distributed
random variables. Supply and Loading are two operations, which are
independent of the offshore weather condition. The baseline values of
these two operations found in the literature are summarized in Table 1.
PINPUT
TD
PHSUB
TP
POUTPUT
whether the current operation can be carried on is answered by solving
the conflict between temporal transition TD and TWAIT by race policy. If
TD fires, then the token goes the upper path, which is the same as
described in sub-model I. If TWAIT fires, the token goes into the lower
path, which means practically waiting for good weather. PWAIT stores
tokens with type Void, which reveals simply the number of fired times
of transition TWAIT. TCONTROLL is an immediate transition, which gives
control to place PWAIT. It fires only when the number of tokens in PWAIT
exceeds the maximum of PWAIT. This strategy is applied in sub-models
elements SSF, SJU, SC, SJD, SR, and SSB, which are dependent on the
weather condition.
TD
PHSUB
TP
POUTPUT
PINPUT
TWAIT
PWAIT
TCONTROLL
Figure 5. Sub-model II
This strategy provides the possibility to handle offshore logistics and
operations separately, which has enormously reduced the size of the state
space of the main model. Besides, sub-models can be easily extended
and reproduced without modifying the main model.
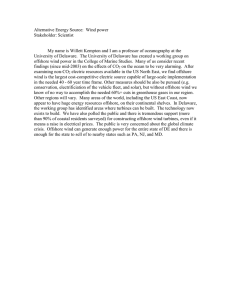
Treatment of historical weather data As mentioned earlier, historical
weather data is used to derive the probability of a stable weather window
of a certain period. To determine the stochastic parameter 𝜆 of the
random variable, 𝑋 ∼ 𝐸𝑥𝑝(𝑋; 𝜆) , assigned to the temporal transition
∞
TWAIT, we define first of all the probability, 𝑝 = ∫𝜇 𝑓𝜆 (𝑥)𝑑𝑥 , stands for
𝜇
1
Figure 4. Sub-model I
Sub-model II This type of sub-model copes with the weather
disturbance by investigating the historical weather data measured on the
German North sea from 1958 to 2007 (Fig. 5). The weather intervention
on the operations is modeled as a conflict in the system. The decision
admissive weather conditions, and the probability, 𝑞 = ∫0 𝑓𝜆 (𝑥)𝑑𝑥 , for
waiting for stable weather. We denote 𝜇 as the mean operation time. It
holds 𝑝 + 𝑞 = 1, where p and q are estimated for the current time step tc.
It is obvious that 𝑞 = 𝐹𝜆 (𝜇). Thus, the parameter 𝜆 can be determined by
using Equation (9). Whenever this conflict occurs, the sub-model goes
through the historical weather data and fetches the section from time step
t to t+d-1. This returns the data sections, Rv, and Rh, from time step t to
t+d-1 for wind speed, v, and wave height, h, respectively. Each column
of Rv and Rh is an incident. By investigating the incidents, the probability
of an operable weather condition in this period can be evaluated. This
can be separated into two steps. The first step is evaluating the incidents
of Rv (and Rh, if the operation is also limited by significant wave height).
An incident, ri, is a vector with d elements due to the hourly resolution
of the weather data. It is evaluated as one if its elements are all beneath
the limitation. Otherwise, it is counted as zero
𝑆𝑚𝑎𝑥
32 OWT Maximal storage of base port
𝑁𝐶𝑎𝑝
4 OWT
𝐷𝑒𝑙𝑎𝑦 𝑚𝑎𝑥
10 h
The capacity of the installation vessel
Maximal delay in operation
Table 3. Meantime of operations in offshore energy installation
Sym.
Value
Description
(12)
𝜇𝑆𝑢𝑝
310 h
Meantime of the supplementation for 8 OWTs
𝜇𝐿
48 h
Meantime of loading for 4 OWTs
The evaluation converts the data sections into a vector, L, that contains
zero or one. The weight p is evaluated as follows
𝜇𝑆𝐹
4h
Meantime of sailing forward
𝜇𝐽𝑈
2h
Meantime of jacking up
𝜇𝐶
14 h
Meantime of constructing for 1 OWT
(13)
𝜇𝐽𝐷
2h
Meantime of jacking down
𝜇𝑅
2h
Meantime of repositioning
where 𝑙𝑖 is the i-th element of vector L. For example, an operation
with a duration d = 10 h should be performed on time step 2160, i.e. 0
o’clock on April 1st. This operation is limited by the wind speed with
vmax = 12 m/s. Fig. 6 shows the historical wind speeds in the time interval
[2160, 2169] h.
𝜇𝑆𝐵
4h
Meantime of sailing backward
∀𝑗 ∈ |𝑟𝑖 |, 𝑟𝑖 (𝑗) ≤ 𝑣𝑚𝑎𝑥 / ℎ𝑚𝑎𝑥
.
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
1,
𝑟𝑖 = {
0,
𝑝=
∑𝑁
𝑖=1 𝑙𝑖
|𝐿|
, and 𝑞 = 1 − 𝑝,
Figure 6. Wind speed from time step 2160 to 2169
Parameters
Parameters, that are defined for both the main model and sub-models, are
considered as global parameters. This group of parameters is
summarized in Table 2. Temporal transition TD in both sub-models fires
with deterministic time, which represents the mean operation time, 𝜇.
The meantime of the offshore operations considered in the work is given
in Table 3. As mentioned, temporal transition TP is assigned with a
negative exponential distributed random parameter to describe the
natural randomness in the process. Practically, this represents the delay.
The delay in operation is considered as the minimum between the mean
operation time, 𝜇, and the maximal delay, 𝐷𝑒𝑙𝑎𝑦𝑚𝑎𝑥 ,
𝐷𝑒𝑙𝑎𝑦 = min (𝜇, 𝐷𝑒𝑙𝑎𝑦𝑚𝑎𝑥 ).
By considering the condition 𝐹𝜆 (𝐷𝑒𝑙𝑎𝑦) = 0.995, i.e. the CDF of the
random variable 𝑋 ∼ 𝐸𝑥𝑝(𝜆) has the value 0.995 at 𝑋 = 𝐷𝑒𝑙𝑎𝑦, the
parameter 𝜆 can be determined by using Equation (9). In
Table 4 the stochastic parameter 𝜆 is given for all the offshore
operations.
Table 2. Global parameters
Sym.
Value
𝑁𝑂𝑊𝑇
80 OWT Size of designed OWF
𝑁𝑖𝑉
1
Description
Number of the installation vessels
Table 4. Stochastic parameters
Sym.
Value
Description
𝜆𝑆𝑢𝑝
0.5298
Rate of delay in supply
𝜆𝐿
0.5298
Rate of delay in loading
𝜆𝑆𝐹
1.3246
Rate of delay in sailing forward
𝜆𝐽𝑈
2.6492
Rate of delay in jacking-up
𝜆𝐶
0.5298
Rate of delay in construction
𝜆𝐽𝐷
2.6492
Rate of delay in jacking-down
𝜆𝑅
2.6492
Rate of delay in repositioning
𝜆𝑆𝐵
1.3246
Rate of delay in sailing backward
In the praxis, the buffer size, i.e. the size of the base port, is chosen as
large as possible to ensure the flexibility of the offshore installation,
since the OWF needs to be constructed as quickly as possible and the
delay in the offshore installation should not lead to dysfunction of the
supply chain. However, a large buffer size increases the cost of the
offshore installation dramatically.
To overcome this problem, the optimal buffer size is required that
reduces the cost and ensures the optimal completion of the OWF
construction. The optimal buffer size, 𝑆𝑜𝑝𝑡 , is essentially constricted by
the decision variables considered in this work: the initial inventory, 𝑆𝑖𝑛𝑖 ,
in the base port and the minimal inventory, 𝑆𝑚𝑖𝑛 . The offshore wind
energy installation can be started with zero storage, i.e. the installation
vessel stays idle in the base port until the OWT components arrive, or
with initial storage so that the installation vessel can be put into operation
loading directly. The maximal storage 𝑆𝑚𝑎𝑥 is the physical limitation
given by the base port. New components are delivered to the base port if
there is a storage shortage in the base port. This insufficiency is given by
the minimal inventory 𝑆𝑚𝑖𝑛 , i.e. the base port has a storage shortage
when the current inventory Scurrent is lower than a certain percentage of
physical maximum
𝑆𝑐𝑢𝑟𝑟𝑒𝑛𝑡 ≤ 𝑆𝑚𝑖𝑛 .
Table 5. Decision variables
Sym.
Value
𝑆𝑖𝑛𝑖
[0, 𝑆𝑚𝑎𝑥 ]
Description
Initial inventory in the base port
𝑆𝑚𝑖𝑛
[0, 𝑆𝑚𝑎𝑥 ]
Minimal inventory in the base port
NUMERICAL CASE STUDY
Herein, we consider the instruction of an OWF with a size of 80 OWTs.
The uncertainties in the offshore weather conditions are conducted by
using the measurements on the German North Sea from 1958 to 2007.
The uncertainties in the operation durations are included by assumptions
due to the lack of knowledge since these are considered as deterministic
in the most existing works. The simulation aims to find the optimal size
for the base port to avoid the high cost resulted from an oversized base
port for the OWF installation. For the convenience of representing the
numerical results, a fixed minimal inventory, Smin = 8 OWTs, is
considered, which is chosen according to the experts’ experience.
Fig. 7 shows the progress of the construction of the 80 OWTs with fixed
initial inventory and minimal inventory in 1000 simulations. It is shown
in Fig. 8 that there is a postponement at the beginning of the construction
if the inventory is insufficient. Besides, construction with fuller initial
storage tends to be finished sooner. Fig. 9 shows how the initial
inventory influences the mean construction time of the 80 OWTs under
the consideration of a fixed minimal inventory, Smin = 8 OWTs.
Logically, starting with a vacant base port leads to a delay of
construction, since it must wait for the arrival of the supply to start. An
initial inventory larger than 12 OWTs does not contribute significant
improvement in construction time.
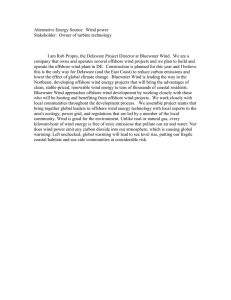
Since the construction benefits from the initial inventory the most at the
beginning, we restrict the simulation for 1000 h to save some
computational work. Fig. 10 shows the numerical results of the number
of constructed OWTs in the first 1000 working hours. In the simulation,
the initial inventory varies from zero to maximal storage, which is set to
32 OWTs according to experts' opinions. The minimal inventory Smin is
set to 8 OWTs, which means the immediate transition will only be
enabled when the storage in base port is lower than this value. The result
shows that the initial inventory has an enormous effect on the number of
constructed OWT in the first 1000 working hours. However, the initial
inventory can only improve the performance of the OWF installation to
a certain degree. Up to 25 OWTs can be installed in the first 1000
working hours with the parametric setup used in the model. Nonetheless,
initial inventory with 12 OWTs will need at a base port with a capacity
of 20 OWTs.
Figure 10. Construction in the first 1000 h with different Sini
Fig. 11 shows the relationship between the initial inventory and the
maximal require buffer size. Thus, it is plausible in this case to choose a
base port with maximal storage of 20 OWTs and the OWF installation
should start with an initial inventory Sini = 12 OWTs.
Figure 7. Construction of 80 OWTs with Sini = 8 OWTs and Smin = 8
OWTs with 1000 simulations
Figure 11. Maximal Storage with different initial inventory Sini
Figure 8. OWF construction with different initial inventory Sini
Figure 9. Mean Construction Time for Smin = 8 OWTs
CONCLUSION
In this work, a multi-leveled model based on the CGSPN approach is
presented for offshore wind energy installation, because it has proved to
be a useful modeling tool for complex systems like offshore installation.
One of CGSPN advantages lies in the fact that they allow integrating
various deterministic and stochastic processes. It contributes to the
literature by considering the uncertainties in both weather conditions and
offshore operations, which have been considered as deterministic by
most existing works. It decomposes the offshore logistics and its
operations by using sub-models, that are introduced to the CGSPN
approach in this work. This gives the model a high extendibility. The
implementation on the root-level gives an unambiguous view over the
OWF installation logistic concept while different operations are
embedded in sub-models.
In the numerical study, we have investigated the construction of a
designed OWF with a size of 80 OWTs. Historical weather data
measured on the German North Sea are used. It aims at closing the gap
of planning the offshore installation on the global level, i.e. determining
the optimal combination of initial inventory and minimal inventory.
Based on the results obtained, the following conclusion may be
formulated: for an OWF with a size of 80 OWTs, the optimal size of the
base port is 20 OWTs and the ideal initial inventory is 12 OWTs under
the consideration of minimal inventory 𝑆𝑚𝑖𝑛 = 8.
The future works shall concentrate on the following aspects: 1) Cross
effect between the initial inventory and minimal inventory and their
sensitivity to the system; 2). Offshore installation planning on both
global and local level; 3). Comparing the framework with other existing
models, and 4) complementary application of different approaches.
ACKNOWLEDGMENTS
The authors gratefully acknowledge the financial support by the DFG
(German Research Foundation) for the Project “OffshorePlan”, grant
number LU 2049/1-1; SZ 51/33-1.
REFERENCES
Aas, B, Halskau Sr, Ø, and Wallace, SW (2009). "The role of supply vessels in
offshore logistics." Maritime Economics & Logistics, 11, 302-325.
Ait-Alla, A, Quandt, M, and Lütjen, M (2013). "Aggregate Installation Planning
of Offshore Wind Farms." International Conference on Communications and
Information Technology, WSEAS Press, 130-135.
Ait-Alla, A, Oelker, S, Lewandowski, M, Freitag, M, and Thoben, K-D (2017).
"A Study of new Installation Concepts of Offshore Wind Farms by Means of
Simulation Model." San Francisco, ISOPE, 607-612.
Besnard, F, and Bertling, L (2010). "An Approach for Condition-Based
Maintenance Optimization Applied to Wind Turbine Blades." IEEE
Transactions on Sustainable Energy, 1(2), 77-83.
Besnard, F, Fischer, K, and Tjernberg, LB (2013). "A Model for the Optimization
of the Maintenance Support Organization for Offshore Wind Farms." IEEE
Transactions on Sustainable Energy, 443-450.
Bilgili, M, Yasar, A, and Simsek, E (2011). "Offshore wind power development
in Europe and its comparison with onshore counterpart." Renewable and
Sustainable Energy Reviews, 15(2), 905-915.
BMWi (2019). Mieterstrombericht nach §99 Erneuerbare-Engergien-Gesetz
2017. Online report, Berlin: Bundesministerium für Wirstschaft und Energie.
Cardoso, SR, Barbosa-Póvoa, APFD, and Relvas, S (2013). "Design and planning
of supply chains with integration of reverse logistics activities under demand
uncertainty." European Journal of Operational Research, 226, 436-451.
Chartron, S (2019). "Improving logistics scheduling and operations to support
offshore wind construction phase." Logistics Research, 1-14.
Cutululis, NA, Litong-Palima, M, and Sørensen, PE (2012). "Offshore Wind
Power Production in Critical Weather Conditions." European Wind Energy
Conference & Exhibition European Wind Energy Association. Copenhagen:
EWEA.
Dinwoodie, I, Endrerud, O-EV, Hofmann, M, Martin, R, and Sperstad, IB (2015).
"Reference Cases for Verification of Operation and Maintenance Simulation
Models for Offshore Wind Farms." Wind Engineering, 39, 1-14.
EIA (2020). U.S. Energy Information Administration. 03 04.
https://www.eia.gov/energyexplained/renewable-sources/.
Endrerud, O-EV, Liyanage, JP, and Keseric, N (2014). "Marine Logistics
Decision Support for Operation and Maintenance of Offshore Wind Parks with
a Multi Method Simulation Model." Winter Simulation Conference. Savanah:
IEEE, 1712-1722.
Herroelen, W, and Leus, R (2005). "Project scheduling under uncertainty: Survey
and research potentials." European Journal of Operational Research, 165, 289-
306.
Huber, P, Jensen, K, and Shapiro, RM (1989). "Hierarchies in Coloured Petri
Nets." ICATPN, 483, 313--341.
Jensen, K (1987). "Coloured Petri Nets." Petri Nets: Central Models and Their
Properties, 248-299.
Jensen, K, and Kristensen, LM (2009). Coloured Petri Nets: Modelling and
Validation of Concurrent Systems, Springer.
Marsan, MA, Balbo, G, Conte, G, Donatelli, S, and Franceschinis, G (1995).
Modelling with generalised stochastic Petri nets, New York, Wiley.
Muhabie, YT, Rigo, P, Cepeda, M, de Almeida D'Agosto, M, and Caprace, J-D
(2018). "A discrete-event simulation approach to evaluate the effect of
stochastic parameters on offshore wind farms assembly strategies." Ocean
Engineering, 2, 279-290.
Muhabie, YT, Caprace, J-D, Petcu, C, and Rigo, P (2015). "Improving the
Installation of Offshore Wind Farms by the use of Discrete Event Simulation."
World Maritime Technology Conference. Providence, SNAME, 1-10.
Murata, T (1989). "Petri Nets: Properties, Analysis and Applications." IEEE.
Oelker, S, Ait-Alla, A, Lütjen, M, Lewandowski, M, Freitag, M, and Thoben, KD (2018). "A Simulation Study of Feeder-Based Installation Concepts for
Offshore Wind Farms." International Society of Offshore and Polar Engineers,
Sapporo, ISOPE, 578-583.
Oelker, S, Lewandowski, M, Ohlendorf, J-H, Haselsteiner, A, and Ait-Alla, A
(2017). "Logistikszenarien für die Errichtung von Offshore-Windparks Herausforderungen
der
Wirtschaftlichkeitsbetrachtung
neuer
Logistikkonzepte." Industrie 4.0 Management, 2, 24-28.
Popova-Zeugmann, L (2013). "Time Petri nets." In Time and Petri nets, 31-137.
Berlin, Springer.
Quandt, M, Beinke, T, Ait-Alla, A, and Freitag, M (2017). "Simulation Based
Investigation of the Impact of Information Sharing on the Offshore Wind Farm
Installation Process." Journal of Renewable Energy, 1-11.
Rippel, D, Jathe N, Becker, M, Lütjen, M, Szczerbicka, H, and Freitag, M (2019a).
"A Review on the Planning Problem for the Installation of Offshore Wind
Farms." IFAC, Berlin, IFAC-PapersOnLine, 1337-1342.
Rippel, D, Jathe, N, Lütjen, M, Szczerbicka, H, and Freitag, M (2019b).
"Simulation and Optimization of Operations for Offshore Installations
Planning Using a Model Predictive Control Scheme." Winter Simulation
Conference (WSC). National Harbor, MD, USA, IEEE 1719-1730.
Santoso, T, Ahmed, S, Goetschalckx, M, and Shapiro, A (2005). "A stochastic
programming approach for supply chain network design under uncertainty."
European Journal of Operational Research, 167, 96-115.
Scholz-Reiter, B, Heger, J, Lütjen, M, and Schweizer, A (2010). "A MILP for
installation scheduling of offshore." International Journal of Mathematical
Models and Methods in Applied Sciences, 371-378.
Shafiee, M (2015). "Maintenance logistics organization for offshore wind energy:
Current progress and future perspectives." Renewable Energy, 77, 182-193.
Sørensen, HC, Hansen, J, and Vølund, P (2001). "Experience from the
establishment of Middelgrunden 40 MW offshore wind farm." European Wind
Energy Conference, Copenhagen, 1-4.
Sun, X, Huang, D, and Wu, G (2012). "The current state of offshore wind energy
technology development." Energy, 41, 298-312.
Tyapin, I, Hovland, G, and Jorde, J (2011). "Comparison of Markov Theory and
Monte Carlo Simulation for analysis of Marine Operations Related to
Installation of an Offshore Wind Turbine." International Congress on
Condition Monitoring, 1071-1081.
Ursavas, E (2017). "A benders decomposition approach for solving the offshore
wind farm installation planning at the North Sea." European Journal of
Operational Research, 258, 703-714.
Vis, IFA, and Ursavas, E (2016). "Assessment approaches to logistics for offshore
wind energy installation." Sustainable Energy Technologies and Assessments,
80-91.
Wikipedia
(2020).
List
of
offshore
wind
farms.
https://en.wikipedia.org/wiki/List_of_offshore_wind_farms#cite_note-101
(accessed 03 13, 2020).
Zimmermann, A, and Hommel, G (1991). "Modelling and Evaluation of
Manufacturing Systems Using Dedicated Petri Nets." The International
Journal of Advanced Manufacturing Technology, 15(2), 132-138.
Zimmermann, A, and Knoke, M (2007). TimeNET 4.0: A Software Tool for the
Performability Evaluation with Stochastic and Coloured Petri Nets. Manual,
Berlin: Real-Time Systems and Robotics Group, Technische Universität
Berlin.