INDUCTION MOTOR
# Torque and Power by use of Thevenin’s Theorem (or Torque-Slip
Characteristics):
When torque and power relations are to be emphasized, considerable simplification results from
application of Thevenin's network theorem to the induction-motor equivalent circuit. In its general form,
Thevenin's theorem permits the replacement of any network of linear circuit elements and complex
voltage sources, such as viewed from two terminals a and b (Fig. 1.15a), by a single complex voltage
source Veq in series with a single impedance Zeq (Fig. 1.15b). The Thevenin-equivalent voltage Veq is
that appearing across terminals a and b of the original network when these terminals are open-circuited;
the Thevenin-equivalent impedance Zeq is that viewed from the same terminals when all voltage sources
within the network are set equal to zero.
Figure 1.15 (a) General linear network and (b)its equivalent at terminals ab by Thevenin's theorem.
For application to the induction-motor equivalent circuit, points a and b are taken as those so
designated in Fig. 1.13 a and b. The equivalent circuit then assumes the forms given in Fig. 1.15 c and d
where Thevenin's theorem has been used to transform the network to the left of points a and b into an
equivalent voltage source VTH in series with an equivalent impedance ZTH RTH jX TH .
R1
X1
Ie
I1
V1
a
Zf
X2
R1
I2
jX
b
Fig. 1.15 (c)
X1
E2
V1
X2
Ie
I1
R2
s
a
Zf
R2
I2
jX
E2
1 s
R2 ( )
s
b
Fig. 1.15 (d)
For most Induction Motors (IM), negligible error results from neglecting the stator resistance. The
Thevenin’s-equivalent stator impedance ZTH is the impedance between terminals a and b of Fig. 1.15 c
and d, viewed toward the source with the source voltage set equal to zero (or equivalently replaced by a
short circuit) and therefore is, ZTH ( R1 jX 1 ) || ( jX ) RTH jX TH and VTH V1
jX
R1 j ( X 1 X )
Poly-Phase Induction Motor
RTH
jXTH
jX2
a
R2
I2
1 s
R2 ( )
s
E2
VTH
b
Fig. 1.15(e). Thevenin equivalent of induction motor circuit model.
The circuit then reduces to Fig 1.15(e) in which it is convenient to take VTH as the reference voltage
VTH
From Fig. 1.15(e). I 2
( RTH
R2
s
) j ( X TH X 2 )
Also electromagnetic torque is, Te
For ‘m’ phase, Te
s {( RTH
VTH2
. So, I 22
( RTH
R2
s
.
) 2 ( X TH X 2 )2
2
1 I 22 R2
VTH
( R2 s )
.
s s
s {( RTH R2 s )2 ( X TH X 2 )2 }
mVTH2 ( R2 s )
mVTH2 ( R2 s )
.
R2 2
R2 2
2
2
) ( X TH X 2 ) } (2 N s 60){( RTH
) ( X TH X 2 ) }
s
s
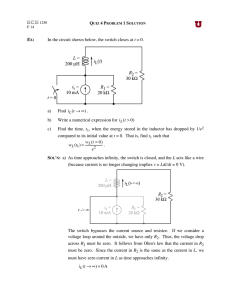
Figure 1.15(f). IM torque-slip curve showing braking, motor and generator regions.
The variation of torque with slip or speed of an IM can be plotted from the above equation for different
values of slip ‘s’ and with the motor connected to constant-frequency voltage source. A general shape of
the torque-speed or torque slip curve is shown in figure 1.15 f. depending upon the value of slip an IM
can have the following operating regions or modes:
____________________________________________________________________________________
mkdas@imu.ac.in
Page 2 of 7
Poly-Phase Induction Motor
Motoring Mode: 0 s 1
Under normal operation, rotor revolves in the direction of rotating field produced by the stator
currents. As such, the slip varies from 1 at standstill to zero at synchronous speed, i.e. 1 s 0 . The
corresponding speed values are zero ( s 1 ) and synchronous speed ( s 0 ).
Generating Mode: s 0
For this operating mode, slip is negative, i.e. s 0 . An IM will operate in this region only when
its stator terminals are connected to constant-frequency voltage source and its rotor is driven above
synchronous speed by a prime mover. The connection of stator terminals to voltage source is essential in
order to establish the rotating air-gap field at synchronous speed. In case stator is disconnected from
voltage source and rotor is driven above synchronous speed by the prime mover, no generating action
would take place.
Braking Mode: s 1
For this mode, slip is greater than 1. A slip more than one can be obtained by driving the rotor,
with a prime mover, opposite to the direction of rotating field. But such a use in practice is rare. A
practical utility of slip more than 1 is obtained by bringing the rotor to a quick stop by braking action,
called ‘Plugging’. For obtaining s 0 , or for obtaining plugging, any two stator leads are interchanged.
With this the phase sequence is reversed and therefore, the direction of rotating magnetic field becomes
suddenly opposite to that of the rotor rotation. The electromagnetic torque Te, now acting opposite to
rotor rotation, produces the braking action. Thus the motor can be quickly brought to rest by plugging,
but the stator must be disconnected from the supply before the rotor can start in the other direction.
All the three regions of operation (braking region, s = 2 to s = 1; motor region, s = 1 to s = 0 and
generator region, s = 0 to s = -1) are illustrated in figure 1.15 f.
The torque-speed characteristics of an IM in the operating region resembles that of a shunt motor
because, even at full load the slip does not exceed 5%, that is, speed varies from 95% to very close to
synchronous speed for different loads. Therefore, the IM torque-speed characteristics are stated to have
shunt characteristics.
# Maximum Torque and Maximum Power:
The maximum torque is also referred to as stalling torque or pull-out torque or breakdown torque
Tem. The condition for maximum internal torque can be obtained by using the maximum power transfer
theorem of circuit theory. The electromechanical torque is a maximum when the power delivered to R2/s
in Fig. 1.13a is a maximum. The torque equation of an IM, as given by,
Te
1 I 22 R2
mVTH2 ( R2 s )
mVTH2 RL
2
2
s s
s {( RTH R2 s ) 2 ( X TH X 2 ) 2 } s {( R RL ) X }
____________________________________________________________________________________
mkdas@imu.ac.in
Page 3 of 7
Poly-Phase Induction Motor
Where, RL = R2/s, RTH = R and X = XTH + X2.
Again the torque can be considered power in the variable resistance R2/s = RL of 1.15f. For maximum
torque or maximum power transfer to RL, we have to equate
dTe
0 . So,
dRL
dTe
( R RL ) 2 X 2 2 RL ( R RL )
mVTH2
0
dRL
{( R RL )2 X 2 }2
2
( X TH X 22 ) 2
Or, RL2 R 2 X 2 ; RL R 2 X 2 RTH
The above equation is the well-known relationship for maximum power transfer which states that the
load resistance is to be equal to the magnitude of internal or the remaining impedance in the series
circuit.
Let, smt be the slip at maximum torque, then RL
So, S mt
Or, Tmax
R2
2
RTH
( X TH X 2 )2
1
mVTH2
s 2( R R 2 X 2 )
R2
2
RTH
( X TH X 22 ) 2 .
smt
and maximum torque, Tmax
0.5
2
mVTH
mVTH2
R2 X 2
s 2( R R 2 X 2 R 2 X 2 )
1
2
s RTH RTH
( X TH X 2 )2
.
So, the slip at which maximum torque occurs is directly proportional to the rotor resistance R2,
but maximum torque Tmax is independent of R2. This means that if R2 is increased by inserting external
resistance in the rotor circuit of a WRIM, the magnitude of maximum internal torque is unaffected but
the slip at which it occurs is affected proportionally.
From maximum torque equation it shows that,
Tmax is directly proportional to the square of the stator voltage.
Tmax is reduced by an increase in stator resistance R1 (i.e RTH) and
Tmax is reduced by an increase in stator leakage reactance X1 and rotor reactance X2.
For obtaining higher value of maximum torque, the air gap is kept as small as is possible. A small air
gap allows more flux to be mutual between stator and rotor windings. As a consequence, leakage fluxes
and therefore leakage reactance are reduced and the magnitude of maximum torque becomes more.
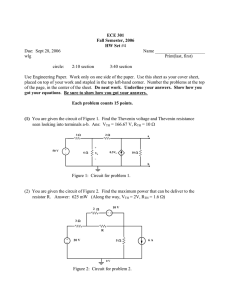
Typical torque-slip curves for an IM with variable rotor-circuit resistances are shown in figure 1.16 and
The speed of motor can be controlled by varying the rotor circuit resistance but maximum torque
remains unaffected.
The starting torque can be varied by changing the rotor circuit resistance.
The line current taken by the motor shall also vary with rotor circuit resistance.
The power factor at starting is also affected by rotor circuit resistance.
____________________________________________________________________________________
mkdas@imu.ac.in
Page 4 of 7
Poly-Phase Induction Motor
In order to get better performance of the IM, starting torque is increased by inserting a suitable external
resistance in the rotor circuit at starting. As the motor accelerates, external resistance is cut out in steps
so as to maintain maximum torque during the accelerating period. Finally, external resistance is reduced
to zero and the rotor attains normal speed.
Figure 1.16 Induction-motor torque-slip curves showing effect of changing rotor-circuit resistance.
The internal mechanical power developed is given by,
Pm mI 22
R2
R
(1 s )VTH2
(1 s ) m 2
.
s
s ( R R2 ) 2 ( X X ) 2
TH
TH
2
s
The power at the slip, which gives the maximum torque,
Pm t Tmaxs (1 sm t ) = 0.5
Or, Pmt 0.5mVTH2
mVTH2
1
s RTH R ( X TH X 2 )
2
TH
1
2
RTH RTH
( X TH X 2 )2
(1-
2
s (1-
R2
2
TH
R
R2
2
RTH
( X TH X 2 )2
( X TH X 2 )2
)
).
However, this is not the maximum power. The maximum power occurs at a different slip, smp, Pm
equation can be rewritten as
(
2
Pm mVTH
( RTH
R2
R2
R2 )
s
s
)2 ( X TH X 2 )2
(
2
mVTH
( RTH R2
R2
R2
R2 )
s
s
R2 ) 2 ( X TH X 2 ) 2
mVTH2 Rl
( R0 Rl ) 2 X 2
Where, Rl = R2/s – R2, R0 = RTH + R2 and X = XTH + X2.
For maximum power, using the maximum power transfer theorem,
____________________________________________________________________________________
mkdas@imu.ac.in
Page 5 of 7
Poly-Phase Induction Motor
Rl R02 X 2 ( RTH R2 )2 ( X TH X 2 ) 2
which is the internal impedance. Putting the
values of Rl, R0 and X.
R2
R2 ( RTH R2 )2 ( X TH X 2 ) 2 = Zsc . Where Zsc is short circuit impedance.
s
Or,
R2
R2
R2 Z sc ; smp
where smp is the slip at maximum power.
smp
R2 Z sc
As is evident, the equation for maximum power is same as derived for maximum torque. That is’
Pmax
2
mVTH
2( R0 R02 X 2 )
2
mVTH
mVTH2
.
2( RTH R2 Z sc ) 2( Rsc Z sc )
Where Rsc = RTH + R2 = short circuit resistance.
Starting Torque:
At starting, N r 0 , Hence s 1.0 . Thus, the starting torque Tstart is given by,
Tstart
s {( RTH
2
mVTH
R2
2
R2 ) ( X TH X 2 )2 }
The above equation shows that the starting torque can be controlled by controlling the rotor resistance
2
( X TH X 2 ) 2 .
R2 . The maximum torque at starting will occur when smst 1 i.e., when R2 RTH
The starting torque increases by adding resistance in the rotor circuit. At the same time the starting
current will reduce. The advantage of the slip-ring induction motor in which a high starting torque is
obtained at low starting current.
# Motor Torque in terms of Maximum Torque:
The torque expression of an IM can also be expressed in terms of maximum torque Tmax and the
dimensionless ratio s
smt
. In order to get a simple and approximate expression, if slip‘s’ is very small
then the stator resistance R1 or the stator equivalent resistance RTH, is neglected compared to R2/s.
The torque equation of an IM, as given by,
Te
s {( RTH
mVTH2 ( R2 s )
mVTH2 ( R2 s )
Where, X = XTH + X2.
R2 2
R2 2
2
2
) ( X TH X 2 ) } s {( RTH
) X }
s
s
The maximum torque equation of an IM, as given by, Tmax
mVTH2
1
2
2s RTH RTH
X2
2
2
2( RTH RTH
X 2 ) R2
Te
mVTH2 ( R2 s)
mVTH
1
Now,
(
) /(
)
2
2
R
Tmax
s {( RTH R2 s ) 2 X 2 } 2s RTH RTH X
( RTH 2 ) 2 X 2 s
s
____________________________________________________________________________________
mkdas@imu.ac.in
Page 6 of 7
Poly-Phase Induction Motor
Since R1 or RTH is neglected,
We know, S mt
So,
Te
R2
2X
.
R
Tmax ( 2 ) 2 X 2 s
s
R2
2
RTH
( X TH X 2 ) 2
R2
2
RTH
X2
. So, from this equation R2 smt X . ( RTH 0 ).
Te
smt X
2X
. ( Substitution of the value of R2 ).
s
X
2
2
Tmax ( mt
s
) X
s
Te
2Tmax
2
Or, Te
.
smt
s
Tmax smt s
s smt
s smt
____________________________________________________________________________________
mkdas@imu.ac.in
Page 7 of 7