Force Field Compensation Learning Without Proprioception
advertisement

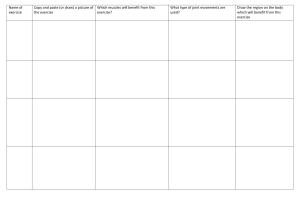
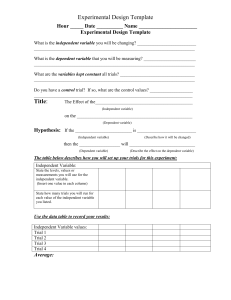
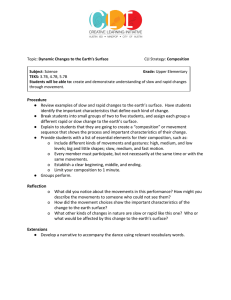
Force field compensation can be learned without proprioceptive error A Melendez-Calderon 1 , L Masia2 , M Casadio3 and E Burdet1 1 Department of Bioengineering, Imperial College London, UK; e.burdet@imperial.ac.uk 2 Robotics, Brain and Cognitive Sciences, Italian Institute of Technology, Italy 3 Department of Informatics, Systems and Telematics, University of Genova, Italy Abstract— Robotic devices able to train both reaching and manipulation, involving multiple degrees-of-freedom (DOF), are often large and complex. Could mechanically simpler devices be used to train people, by using only visual feedback and constraining the limb in one or more of the degrees of freedom during task performance? This study examines how this motion guidance influences motor learning in healthy subjects, when virtual kinematic error is provided as visual feedback. The results demonstrate that i) virtual learning is possible, though the learning pattern are slightly different than in learning with full proprioception error, and ii) the inverse model learned is similar in the two conditions. y x y x I. BACKGROUND OF THE STUDY Robotic systems have been developed in recent years to train activities of daily living (ADL), e.g. [1]–[3]. To control movements in the space, these systems generally involve a large number of degrees-of-freedom (DOF). For example, ARMin II [3] has six DOF to enable positioning of the hand in the 3D workspace and Gentle/S [2] has 9 DOF to train both reaching and grasping in a reach-grasp-transfer-release sequence. As a consequence, these systems are often large and costly, and hardly compatible with a decentralized use. Is it possible to train functional tasks using compact robotic devices with limited DOF? To perform arbitrary movements in the 3D space, humans would need at least 6 DOF, even more if hand and fingers movements are considered. However, neuroscience studies have shown that humans generally use regular motion patterns involving few DOF or synergies [4], simplifying motion control. Could we use these motion invariances to simplify the design of dedicated rehabilitation devices? For example, it is well known that, in reaching movements, the hand follows approximately a straight line path from the start to the target [5]. Therefore, ARM Guide [6] has only one active DOF, which considerably simplifies the design and makes the device safer and cheaper relatively to systems moving in 6 DOF. In a recent study [7], we analyzed typical movements of healthy subjects in three critical ADL: pick-and-place of objects, drinking and eating. The results showed that the hand path remains mainly confined to a vertical plane, and the deviation relatively to this plane is only 5% of the traveled distance [7]. Based on these results, one could assume that lateral deviation is negligible and one could create training devices on which the hand path is constrained to move in a channel. The question we investigate here is whether/how these lateral constraints influence learning, and if providing Fig. 1. Subject performing horizontal arm movements with/without lateral constraint using the Braccio di Ferro workstation. kinematic error is sufficient to promote a reliable feedforward internal model of a real task. II. L EARNING A VIRTUAL FORCE FIELD To address this question we let subjects experience both a virtual and a real velocity dependent force field (VF) defined by 0 25 ẋ Fx = , (1) Fy −25 0 ẏ where the force applied on the hand F is in N and the hand velocity (ẋ, ẏ)T in m/s. In order to compensate for the lack of lateral motion error, our idea is to provide visual feedback of this error, computed from a model of the subject’s arm and robot’s dynamics. The paradigm consists in learning the virtual VF while moving along a channel (of stiffness 4000N/m and damping 100Ns/m) when performing horizontal point-to-point arm movements. For this purpose we used the Braccio di Ferro (BDF) manipulandum shown in Fig.1 at the Human Behavior Lab of the Italian Institute of Technology. The channel constrains movement to the y axis, hence proprioceptive feedback on the x deviation is absent, and the VF is basically virtual (vVF). However, the subjects are provided with visual feedback of the estimated hand trajectory as without channel. The simulated trajectory was estimated using a subject-specific arm model (arm dynamics modeled as in [8], [9] and anthropometrical data obtained from tables in O. Dössel and W.C. Schlegel (Eds.): WC 2009, IFMBE Proceedings 25/IX, pp. 381–383, 2009. www.springerlink.com 382 A. Melendez-Calderon et al. Robot Model Robot dynamics - Lateral force Subject-robot j interaction Real kinematics (Y) After-effects + Velocity dependant Force field + Human Arm Model Catch-trials Real VF Subject 1 Virtual kinematics (X) Visual Display Before-effects Subject 2 Subject 3 0.10 VF (X) 0.05 Y [m] VF (Y) Fig. 2. Diagram of dynamic model implementation. 0.00 -0.05 -0.10 Subject 4 • • • • 0.00 -0.05 -0.10 Familiarization: 25 successful movements constrained in a channel and with no vVF but with feedback of the estimated hand trajectory. This, in order to familiarize with the model dynamics without any learning. Learning: 80 successful movements in a channel and with a vVF, i.e. feedback of the estimated had trajectory with a vVF. Testing real VF: 25 movements on which 20 were performed in a channel with vVF and 5 pseudo-random catch trials with a rVF. Testing after-effects: 25 movements on which 20 were performed in a channel with vVF and 5 pseudo-random catch trials with no channel and no rVF. Washout: 25 successful movements with no channel and no rVF. Baseline (before-effects): 25 movements on which 20 were performed with no channel and no rVF, and 5 pseudo-random catch trials with rVF. Subject 7 Subject 8 Subject 9 0.10 0.05 Y [m] Nine right-handed male subjects, with no history of neurological disease, naive to the device and to the task, were recruited for this experiment. The task consisted in performing unidirectional point-to-point movements of amplitude 20cm in 0.6±0.1s with the dominant hand from a 2cm diameter origin of to a circular target of the same size. Time started from the moment the subject left the origin and stopped once he reached the target. Subjects were instructed to perform the movement as straight as possible within the specified time range. Feedback of the trial performance was provided to the subjects indicating them whether they perform “too slow”, “too fast”, or if their movement was successful. A trial was successful when the subject moved the hand from the origin to the target within the specified time. Each subject performed five trials in six phases: • Subject 6 0.05 III. P ROTOCOL • Subject 5 0.10 Y [m] [10]), a linear second-order robot model, the vVF, the lateral force applied to the channel and the hand position in the y direction, as shown in Fig.2. Once the subjects have trained in the virtual VF, the channel is removed allowing them to move in the 2D space under a real VF (rVF) and a real Null Field (rNF). This enables us to determine whether subjects learned within the limited DOF conditions, and to observe the after effects of the learning. 0.00 -0.05 -0.10 -0.05 0.00 X [m] 0.05 -0.05 0.00 X [m] 0.05 -0.05 0.00 X [m] 0.05 Fig. 3. Comparison between (red) before-effects, (green) after-effects and (blue) catch trials of real VF after learning the virtual VF. The thick lines represent the mean trajectory of each block. IV. R ESULTS Catch trials on which the channel was removed and a rVF was applied to the subjects after having learned the virtual VF suggest that subjects were able to learn compensating for the VF in a lateral constrained condition. This is shown by the trajectory in rVF after having learned in vVF, which is almost straight as illustrated in Fig.3. Fig.4 shows the learning phase of a representative subject, and it can be observed that the learning rate is not as fast as it would be when learning in normal conditions (e.g. [11]). Nevertheless, this learning led to a fairly good inverse model of the real task dynamics as suggested by the catch trials during the testing phase (Fig.5). A comparison between the angular aiming error of the last 10 trials of learning phase and the catch trials of rVF of all subjects showed there was no statistically significant difference (p=0.17) between the virtual and the real environments. Subjects reported to be unaware of both rVF catch trials and IFMBE Proceedings Vol. 25 Force Field Compensation Can Be Learned without Proprioceptive Error 383 of being laterally constrained during the learning phase with vVF. First 10 trials 0.15 Mean Trajectory Trials in virtual VF Too Fast OK Too Slow Middle trials Too Fast OK Too Slow Catch trials of real VF 0.15 Last 10 trials 0.10 Y [m] Y [m] 0.10 0.05 0.00 0.00 -0.05 -0.05 -0.10 0.05 -0.05 0.00 0.05 -0.05 0.00 X [m] 0.05 -0.05 X [m] 0.00 -0.10 0.05 -0.05 X [m] 0.00 0.05 -0.05 X [m] 0.00 0.05 X [m] 0.4 0.03 0.02 Y ‘ [m/s] Mean Square Error [m] 0.5 0.04 0.01 0.00 0 20 40 60 80 100 120 Trial Number Fig. 4. 0.3 0.2 0.1 0.0 0 Learning session of a representative subject in the virtual VF. Velocity profiles of the all catch trials in rVF conditions showed that in some cases there is slight movement correction at approximately 625ms after initiation of the movement. This happened in approximately 54.54% of all the experiment catch trials in rVF conditions. These could be due to inconsistencies between the model and the real arm-robot dynamics. We are currently performing complementary experiments for learning in multiple directions using virtual kinematic error as well as the effect of retention of learning when providing kinematic error. V. ACKNOWLEDGMENT This work in funded in part by the EU-FP7 grant HUMOUR, IIT and Imperial College. A Melendez doctoral studies are sponsored by CONACYT-Mexico. R EFERENCES [1] L. Masia, H. I. Krebs, P. Cappa, and N. Hogan, ”Design and Characterization of Hand Module for Whole-Arm Rehabilitation Following Stroke,” in IEEE/ASME Transactions on Mechatronics. vol. 12, pp. 399407, 2007 [2] R.C.V. Loureiro and W. S. Harwin,Reach and grasp therapy: Design and control of a 9-DOF robotic neuro-rehabilitation system, Proc. 10th Int. Conf. on Rehabilitation Robotics, Noordwijk, The Netherlands, 2007, pp. 757-763 [3] T. Nef, M. Mihelj, G. Kiefer, C. Perndl, R. Muller and R. Riener,ARMin Exoskeleteon for arm therapy in stroke patients, Proc. 10th Int. Conf. on Rehabilitation Robotics, Noordwijk, The Netherlands, 2007, pp. 68-74 [4] N Bernstein The co-ordination and regulation of movements, Pergamon, London, 1967. [5] P. Morasso, ”Spatial Control of Arm Movements”, Experimental Brain Research 42: 223-227, 1981. 20 40 60 Time [cs] 80 100 0 20 40 60 80 100 Time [cs] Fig. 5. Comparison between trials in virtual VF and catch trials of real VF of the same subject as in Fig.4 during the testing phase. [6] L. E. Kahn, W. Z. Rymer, and D. J. Reinkensmeyer, ”Adaptive assistance for guided force training in chronic stroke,” in Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society., San Francisco, CA, USA, pp. 2722-2725, 2004. [7] C.F.Yeong, A. Melendez-Calderon and E. Burdet, ”Analysis of Pick-andplace, Eating and Drinking Movements for the Workspace Definition of Simple Robotic Devices”, submitted to IEEE International Conference on Rehabilitation Robotics (ICORR), 2009. [8] Burdet, E., Tee, K., Mareels, I., MILNER, T.E., Chew, C., Franklin, D., Osu, R. and Kawato, M. ”Stability and motor adaptation in human arm movements”. Biological Cybernetics, 94, 20-32, 2006. [9] Tee, K. P., Burdet, E., Chew, C.M. and Milner, T.E. ”A model of force and impedance in human arm movements”. Biological Cybernetics, 90, 368-375, 2004. [10] Winter, D.A. ”Biomechanics and motor control of human movement”, John Wiley & Sons, 2004. [11] Franklin DW, So U, Burdet E, and Kawato M. ”Visual Feedback Is Not Necessary for the Learning of Novel Dynamics”. PLoS ONE, 2007. IFMBE Proceedings Vol. 25