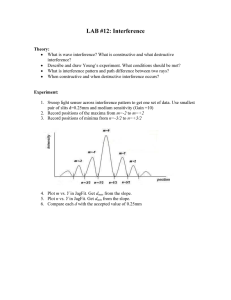
CP Interference
January 2008
©NACE International, 2006
IMPORTANT NOTICE
Neither the NACE International, its officers, directors, nor members thereof accept
any responsibility for the use of the methods and materials discussed herein. No
authorization is implied concerning the use of patented or copyrighted material.
The information is advisory only and the use of the materials and methods is
solely at the risk of the user.
It is the responsibility of the each person to be aware of current local, state and
federal regulations. This course is not intended to provide comprehensive
coverage of regulations.
Printed in the United States. All rights reserved. Reproduction of contents in
whole or part or transfer into electronic or photographic storage without
permission of copyright owner is expressly forbidden.
Acknowledgements
The scope, desired learning outcomes and performance criteria of this course were
developed by the CP Task Group under the auspices of the NACE Education
Administrative Committee.
The time and expertise of several members of NACE International have gone into the
development of this course—and its task analysis, course outline, student manual,
classroom lab manual, presentation slides, and examinations. Their dedication and efforts
are greatly appreciated.
On behalf of NACE, we would like to thank the task group for its work. Their efforts
were extraordinary and their goal was in the best interest of public service—to develop
and provide a much needed training program that would help improve corrosion control
efforts industry-wide. We also wish to thank their employers for being generously
supportive of the substantial work and personal time that the members dedicated to this
program.
CP Interference Course Development Task Group
Paul Nichols, Task Group Chairman
Brian Holtsbaum
Kevin Parker
David A. Schramm
Steven R. Zurbuchen
Steven Nelson
Donald R. Mayfield
Shell Global Solutions, Houston, Texas
CC Technologies Canada, Ltd., Calgary,
Alberta
CC Technologies, Mt. Pleasant, Michigan
EN Engineering, Woodridge, Illinois
EN Engineering, Topeka, Kansas
Columbia Gas Transmission, Charleston,
West Virginia
Dominion
Transmission,
Delmont,
Pennsylvania
CP Interference
Daily Course Outline
DAY ONE
Introduction, Welcome, Overview
Chapter 1
Stray Current Interference
DAY TWO
Chapter 2
DC Interference
(Includes Experiment 2-1)
DAY THREE
MORNING
Chapter 2
DC Interference
AFTERNOON
Chapter 3
AC Interference
(Includes experiments 3-1, 3-2, and 3-3)
DAY FOUR
Chapter 3
AC Interference
DAY FIVE
MORNING
Chapter 3
AC Interference
AFTERNOON
Chapter 4
Telluric Current Interference
DAY SIX
MORNING
Exam
CP Interference Course Manual
© NACE International, 2006
January 2007
Introduction
Introduction
The Cathodic Protection (CP) Interference course is a six-day course
focusing on alternating current (AC) and direct current (DC)
interference. The course includes in-depth coverage of both the
theoretical concepts and the practical application of identifying
interference and interference mitigation techniques. Students will
learn to identify the causes and effects of interference as well as
conduct tests to determine if an interference condition exists and
perform calculations required to predict AC interference. The course
is presented in a format of lecture, discussion and hands-on, in-class
experiments, case studies and group exercises. There is a written
examination at the conclusion of the course.
Who Should Attend
This course is designed for persons who have extensive CP field
experience, a strong background in mathematics, and a strong
technical background in CP.
Prerequisites
• CP 3–Cathodic Protection Technologist certification
recommended
• Minimum of 3 years CP work experience
Length
The course begins at 1 p.m. on Sunday and concludes Friday
afternoon.
Daily class hours: 8 a.m. to 6:30 p.m. Monday through Thursday and
8 a.m. to 3 p.m. Friday.
Reference Book
Students will receive the CP Interference Course Manual prior to the
start of the course. A course manual on CD-ROM will be provided
to students on-site.
CP Interference Course Manual
© NACE International, 2006
July 2007
1
Introduction
Quizzes and Examinations
There will be four (4) quizzes distributed during the week and
reviewed in class by the instructors.
This course has a written final examination. The final examinations
will be given on Friday.
The written final examination is open-book and students may bring
reference materials and notes into the examination room.
Non-communicating,
battery-operated,
silent,
non-printing
calculators, including calculators with alphanumeric keypads, are
permitted for use during the examination. Calculating and computing
devices having a QWERTY keypad arrangement similar to a
typewriter or keyboard are not permitted. Such devices include but are
not limited to palmtop, laptop, handheld, and desktop computers,
calculators, databanks, data collectors, and organizers. Also excluded
for use during the examination are communication devices such as
pagers and cell phones along with cameras and recorders.
A score of 70% or greater on the examination is required for
successful completion of the course. All questions are from the
concepts discussed in this training manual.
You will receive written notification of your exam results as quickly
as possible. Your results will not be available on Friday.
Introductions
We would like for each of you to stand, one at a time and introduce
yourself to the class. Tell us:
•
Your name
•
Your company’s name and location
•
Your job function
•
Your experience related to CP Interference.
CP Interference Course Manual
© NACE International, 2006
July 2007
2
CP Interference
Course Manual
Table of Contents
General Course Information
Daily Course Outline
Introduction
Chapter 1–Stray Current Interference
1.1 Historical Background ...........................................................
1:1
1.2 Typical Stray Current Circuit Arising from a Transit
System Operation .................................................................
1:5
1.3 Stray Current Charge Transfer Reactions on a.....................
Metallic Structure
1:6
1.4 Effects of Stray Current on Metallic Structures .....................
1:9
1.4.1
1.4.2
1.4.3
At the Current Discharge Location......................................
At Area of Current Pick-Up .................................................
Along the Structure .............................................................
1:9
1:15
1:19
1.5 Summary ..............................................................................
1:21
Summary of Equations..................................................................
1:22
Figures
Fig. 1-1
Fig. 1-2
Fig. 1-3
Fig. 1-4
Fig. 1-5
Fig. 1-6
Early Electric Trolley..............................................................
Pipe-to-soil Potential Changes due to Transit System
Stray Current Activity were Recorded on Smoked Charts..
Co-efficient of Corrosion at Different Frequencies for
Iron Electrode Denoted as Average Electrode Loss...........
Typical Stray Current Paths Around a DC Transit System ....
Typical Stray Current Interference on a Metallic
Underground Structure .......................................................
Simplified pH Pourbaix Diagram For Iron in Water at 25ºC
Showing Potential Shift Direction for Current Pick-up
and Discharge at Low pH ...................................................
CP Interference Course Manual
© NACE International, 2006
June 2007
1:1
1:3
1:4
1:6
1:6
1:8
Fig. 1-7
Fig. 1-8
Fig. 1-9
Fig. 1-10
Fig. 1-11
Fig. 1-12
Fig. 1-13
Fig. 1-14
Fig. 1-15a
Fig. 1-15b
Fig. 1-16
Simplified pH Pourbaix Diagram For Iron in Water at 25ºC
Showing Potential Shift Direction for Current Pick-up
and Discharge at High pH...................................................
Current Discharge from a Metal Structure to Earth via
an Oxidation Reaction ........................................................
Superposition of a Stray Current and a Cathodic Protection
Current at a Metal/Electrolyte Interface ..............................
Randle’s Electrical Circuit Model of a Metal/Electrolyte
Interface..............................................................................
Theoretical Conditions of Corrosion, Immunity and
Passivation of (a) Aluminum at 25ºC and
(b) Lead at 25ºC .................................................................
Comparison of Zn and Al Coatings for Corrosion
Resistance as Functions of pH ...........................................
Typical Section Through a Joint in Two Types of PCCP .......
Cathodic Blistering/Disbondment of Protective Coating ........
Stray Current Discharge and Pick-Up Around an
Electrically Discontinuous Joint Though the Earth..............
Stray Current Discharge and Pick-Up Through the
Internal Aqueous Medium Around an Electrically
Discontinuous Bell and Spigot Joint on Cast Iron Piping....
Stray Current Circuit in an AC Electrical Distribution
System................................................................................
1:9
1:10
1:10
1:14
1:16
1:17
1:18
1:19
1:19
1:20
1:20
Tables
Table 1-1 Theoretical Consumption Rates of Various Metals and
Substances ..................................................................
1:12
Table 1-2 Electrochemical and Current Density Equivalence with
Corrosion Rate....................................................................
1:13
Chapter 2–DC Interference
2.1 Introduction ...........................................................................
2:1
2.2 Detecting Stray Current ........................................................
2:23
2.2.1 Mitigation of Interference Effects from Impressed Current
Cathodic Protection Systems .....................................
2:24
a. Source Removal or Output Reduction ..........................
2:25
b. Installation of Isolating Fittings......................................
2:26
c. Burying a Metallic Shield Next to the Interfered-with
Structure ....................................................................
2:27
d. Installation of Galvanic Anodes on Interfered-with
Structure at Point of Stray Current Discharge............
2:28
e. Installation of an Impressed Current Distribution System
on the Interfered-with Structure at Point of Stray Current
Discharge...................................................................
2:33
f. i. Installing a Bond Between the Interfered-with and
CP Interference Course Manual
© NACE International, 2006
June 2007
Interfering Structures................................................
ii. Calculation of Bond Resistance ...............................
g. Use of Coatings in the Mitigation of Interference Effects
2.2.2
2:33
2:35
2:40
Other Sources of DC Stray Current ....................................
2:41
a. DC Transit Systems ......................................................
2:42
i. Analysis of Transit System Stray Currents ...............
2:44
ii. Mitigation of Transit System Stray Currents .............
2:51
b. High Voltage Direct Current (HVDC) Electrical Transmission
Systems .....................................................................
2:55
c. DC Welding Operations ................................................
2:57
Experiment 2-1:
To Demonstrate DC Interference
and Its Mitigation........................................................
2:59
………………………………………………………. …..
2.64
Summary of Equations ............................................................................
2:65
Case Study
Figures
Fig. 2-1
Fig. 2-2
Fig. 2-3
Fig. 2-4
Fig. 2-5
Fig. 2-6
Fig. 2-7a
Fig. 2-7b
Fig. 2-8
Fig. 2-9
Fig. 2-10
Fig. 2-11
Fig. 2-12
Fig. 2-13
Fig. 2-14
Fig. 2-15
Fig. 2-16
Parallel Current Paths in the Earth ....................................
Parallel Current Paths in a Pipeline Cathodic Protection
Section................................................................................
Parallel Current Paths in Vertically Stratified Soil Conditions
Parallel Current Paths in Horizontally Stratified Soil
Conditions...........................................................................
Polarization Test Results.......................................................
Stray Current in a Metallic Structure Parallel to a
Cathodically Protected Structure ........................................
Voltage vs. Distance from a Vertically Oriented Anode .........
Multiple Vertical Anodes Connected to a Common
Header Cable .....................................................................
Multiple Horizontal Anodes Connected to a Common
Header Cable .....................................................................
Hemispherical Electrode........................................................
Cathodic Protection Circuit Model with Foreign Structure
Intercepting the Anode Gradient.........................................
Potential Profile along the Interfered-with Structure ..............
Electrical Model for Interfered-with Pipe ................................
Attenuation Model..................................................................
Voltage Gradient in the Earth Around a Cathodically
Protected Bare Pipeline ......................................................
Cathodic Protection Circuit Model .........................................
Cathodic Protection Circuit Model with Foreign Structure
Intercepting the Anode Gradient.........................................
Stray Current in a Foreign Metallic Structure that Intercepts
both the Anodic and Cathodic Voltage Gradient.................
CP Interference Course Manual
© NACE International, 2006
June 2007
2:1
2:2
2:3
2:3
4:5
2:5
2:6
2:7
2:8
2:9
2:11
2:14
2:14
2:15
2:18
2:18
2:19
2:20
Fig. 2-17 Cathodic Protection Circuit Model with Foreign Structure
Intercepting both Anodic and Cathodic Voltage Gradient...
Fig. 2-18 Stray Current in a Foreign Metallic Structure that Intercepts
the Cathodic Protection Gradient........................................
Fig. 2-19 Cathodic Protection Circuit Model for Foreign Structure
Intercepting the Cathodic Voltage Gradient........................
Fig. 2:20 Typical Potential Profile on an Interfered-with Structure
that Intersects both Anodic and Cathodic Voltage
Gradient with the Current Source Interrupted.....................
Fig. 2-21 Current Changes In and Near an Interfered-with Structure ...
Fig. 2-22 Stray Current Arising from Installation of Isolating Fittings ....
Fig. 2-23 Using a Buried Metallic Cable or Pipe as a Shield to
Reduce Stray Current Interference.....................................
Fig. 2-24 Cathodic Protection Current Model for a Buried Metallic
Shield Connected to the Negative Terminal of the
Transformer-Rectifier..........................................................
Fig. 2-25 Interference Mitigation using Galvanic Anodes at Stray
Current Discharge Location ................................................
Fig. 2-26 Electrical Circuit Model for Mitigating Stray Current
Interference at a Stray Current Discharge Site Using
Galvanic Anodes.................................................................
Fig. 2-27 Potential Profile Changes on a Pipeline where Stray
Current is Discharging in an End-Wise Pattern ..................
Fig. 2-28 Interference Mitigation Using a Resistance Bond..................
Fig. 2-29 Measurements Required to Determine Size of Resistance
Bond Re ..............................................................................
Fig. 2-30 Use of a Dielectric Coating to Mitigate Interference ..............
Fig. 2-31 Typical Stray Current Paths Around a DC Transit System ....
Fig. 2-32 Typical Structure-to-Soil Potential Recording with Time
Caused by Interference from a DC Transit System ............
Fig. 2-33 Current Clamp Used to Measure Pipeline Currents ..............
Fig. 2-34 Line Current Survey to Locate Source of Interference
Using IR-Drop Test Stations ...............................................
Fig. 2-35 Line Current Plots for Example in Figure 2-34 ......................
Fig. 2-36 Exposure Survey to Locate Point of Maximum Exposure......
Fig. 2-37 Exposure Survey Plots for Example in Figure 2-36 ...............
Fig. 2-38 Mutual Survey to Confirm Source of Interference..................
Fig. 2-39 Pipe-to-Soil Potential Versus Pipe-to-Rail Potential for
Example in Figure 2-38.......................................................
Fig. 2-40 Exposure Survey Conducted Without the Measurement
Of Pipeline Currents ...........................................................
Fig. 2-41 Exposure Survey Plots for Example in Figure 2-40 ...............
Fig. 2-42a Typical Embedded Track Installation.....................................
Fig. 2-42b Typical Direct-Fixation Isolating Fastener .............................
Fig. 2-43 Typical Utilities Drainage System at a Transit Substation .....
Fig. 2-44 Schematic Showing Circulating Current between Transit
Substations Through Direct Bonds to Utilities ....................
Fig. 2-45 Forced Drainage Bonds Using a Potential Controlled
Rectifier...............................................................................
Fig. 2-46 Electrical Schematic for a HVDC System ..............................
CP Interference Course Manual
© NACE International, 2006
June 2007
2:20
2:21
2:22
2:23
2:24
2:26
2:27
2:28
2:29
2:30
2:33
2:34
2:36
2:41
2:42
2:43
2:44
2:45
2:46
2:47
2:48
2:48
2:49
2:50
2:50
2:52
2:52
2:52
2:53
2:54
2:55
Fig. 2-47 Potential-Time Plot for a Metallic Structure being
Interfered-with by a HVDC System.....................................
Fig. 2-48 Stray Current Caused by DC Welding Operations ................
2:57
2:58
Experiment Schematic No. 1...................................................................
Experiment Schematic No. 2...................................................................
Experiment Schematic No. 3...................................................................
2:59
2:60
2:61
Table 2-1 Specific Leakage Resistances and Conductances in
1000 Ω-cm Soil or Water .......................................................
Table 2-2 Types of Reverse Current Switches ......................................
2:13
2:54
Tables
Chapter 3–AC Interference
3.1 Introduction ...........................................................................
3.1.1
3.1.2
3.1.3
Experiment 3-1:
3:1
Electrostatic (Capacitive) Coupling.....................................
3:2
Electromagnetic (Inductive) Coupling .................................
3:11
Conductive Coupling (Resistive Coupling) During Powerline Fault
Conditions...........................................................................
3:14
To Demonstrate the Effects of Electrostatic
Induction .............................................................................
3:16
3.2 Basic Theory of Electromagnetically Induced Voltages ........
3:19
3.2.1
3.2.2
Experiment 3-2:
AC Circuit Theory ...............................................................
The Nature of Induced AC Pipeline Voltages .....................
3:19
3:34
To Demonstrate the Effects of Electromagnetic
Induction .............................................................................
3:42
3.3 Induced AC Voltages ............................................................
3:44
3.3.1
3.3.2
Experiment 3-3:
Factors that Affect the Longitudinal Electric Field...............
Factors that Affect the Pipeline Voltages............................
3:44
3:48
To Further Investigate the Effects of Electromagnetic
Induction .............................................................................
3:57
3.4 Deleterious Effects of AC Interference..................................
3:60
3.4.1
3.4.2
3.4.3
Electric Shock Hazards.......................................................
AC Corrosion ......................................................................
.1 Theory...........................................................................
.2 AC Corrosion Case Histories........................................
.3 AC Corrosion Field Test Procedures ............................
Fault Current Effects...........................................................
CP Interference Course Manual
© NACE International, 2006
June 2007
3:60
3:67
3:67
3:75
3:90
3:93
3.5 Induced AC Voltage Prediction and Mitigation Calculations .
3.5.1
3.5.2
3.5.3
3:95
Data Gathering ...................................................................
Field Estimation of LEF.......................................................
Measurement and Interpretation of Soil Resistivity Data....
3:95
3:97
3:98
3.6 Prediction of Steady-State Induced AC Voltages..................
3:102
3.6.1
3.6.2
3.6.3
3.6.4
3.6.5
Introduction .........................................................................
Calculation of Pipeline Electrical Characteristics................
Sectionalization of Pipeline-Powerline Route .....................
Determination of Longitudinal Electric Field (LEF) .............
Calculation of Induced Pipeline Voltages ...........................
3:102
3:102
3:106
3:107
3:110
3.7 Prediction of Fault Voltages ..................................................
3:115
3.7.1
3.7.2
3.7.3
3.7.4
Introduction .........................................................................
Conductive Coupling Due to Fault Currents .......................
Inductive Coupling Due to Fault Currents...........................
Other Related Calculations.................................................
(a) Ground Electrode Resistance ....................................
(b) Step and Touch Potential ..........................................
(c) Conductor Size ..........................................................
3:115
3:115
3:122
3:123
3:123
3:125
3:126
3.8 Equipment for AC Mitigation .................................................
3:126
3.8.1
3.8.2
3.8.3
DC Decoupling Devices......................................................
Test Stations.......................................................................
Sacrificial Anodes ...............................................................
3:126
3:138
3:139
Group Activity – AC Mitigation System Design .......................................
3:142
Summary of Equations ............................................................................
3:145
Figures
Fig. 3-1a Single Horizontal 3φ Circuit with Shield Wires.......................
Fig. 3-1b Distribution System (1φ 4kV Primary and 2φ 240V Secondary
with Neutral)........................................................................
Fig. 3-2
AC Voltage Waveforms in a 3φ Circuit ..................................
Fig. 3-3
Elements of a Capacitor ........................................................
Fig. 3-4
Electrostatic Coupling during Pipeline Construction ..............
Fig. 3-5
Voltage Divider Circuits – Resistive (left) and Capacitive
(right) ..................................................................................
Fig. 3-6
Calculation of Typical Capacitance Values for a Pipe
on Skids ..............................................................................
Fig. 3-7
Calculation of Typical Electrostatically Induced Voltage
for a Pipe on Skids..............................................................
Fig. 3-8
Calculation of Typical Shock Current Resulting from
Electrostatic Coupling .........................................................
Fig. 3-9
Calculation of Typical Electrostatically Induced Voltage
CP Interference Course Manual
© NACE International, 2006
June 2007
3:2
3:2
3:2
3:3
3:4
3:5
3:6
3:7
3:8
for an Automobile................................................................
Fig. 3-10 Calculation of Typical Electrostatically Induced Voltage
for a Buried Pipe .................................................................
Fig. 3-11 Electromagnetic Field Created by Current Flow in a Wire.....
Fig. 3-12 Electromagnetic Induction in a Multiple-Turn, Iron-Core
Transformer ........................................................................
Fig. 3-13 Electromagnetic Induction in a Single-Turn, Air-Core
Transformer ........................................................................
Fig. 3-14 Electromagnetic Coupling Between a Pipeline and an
Overhead AC Powerline .....................................................
Fig. 3-15 Conductive Coupling During Line-to-Ground Fault
Conditions...........................................................................
Fig. 3-16 Determination of Voltage on a Transformer Secondary ........
Fig. 3-17 Effect of Interconnecting the Secondary Windings ................
Fig. 3-18 Effect on Polarity on a Series Combination of DC Voltage
Sources ..............................................................................
Fig. 3-19 Effect of “Polarity” on a Series Combination of AC Voltage
Sources ..............................................................................
Fig. 3-20 In-Phase 60 Hz AC Waveform ..............................................
Fig. 3-21 Typical Electrical Distribution Transformer ............................
Fig. 3-22 Typical Residential Electrical Service ....................................
Fig. 3-23 AC Waveforms on a Residential Electrical Service ...............
Fig. 3-24 Plot of General Equation for Sinusoidal AC Waveforms........
Fig. 3-25 Typical Phasor Diagram ........................................................
Fig. 3-26 Series Combination of AC Voltage Sources ..........................
Fig. 3-27 Phasor Diagram for Problem in Figure 3-26 ..........................
Fig. 3-28 Determination of Current through a Capacitor.......................
Fig. 3-29 Voltage and Current Waveforms for a Purely Capacitive
Circuit..................................................................................
Fig. 3-30 Determination of Current through an Inductor .......................
Fig. 3-31 Voltage and Current Waveforms for a Purely Inductive
Circuit..................................................................................
Fig. 3-32 Phasor Representation of a Three-Phase Circuit ..................
Fig. 3-33 Electric Model of Single Pipe Section ....................................
Fig. 3-34 Simplified Electrical Model of Single Pipe Section.................
Fig. 3-35 Simplified Electrical Model of Single Pipe Section.................
Fig. 3-36 Series Combination of Multiple Pipe Sections .......................
Fig. 3-37 Series Combination of Two Pipe Sections ............................
Fig. 3-38 Series Combination of Two Pipe Sections (Simplified)..........
Fig. 3-39 Circuit Analysis Using Kirchhoff’s Law...................................
Fig. 3-40 Circuit Analysis Using Kirchhoff’s Law...................................
Fig. 3-41 Induced AC Voltage Profile Along Two-Section Pipe
Method of Figure 3-39 ........................................................
Fig. 3-42 Profile of Induced AC Voltages and their Phase Angles
along any Pipeline having Uniform Electrical
Characteristics ....................................................................
Fig. 3-43 Effect of Electrical Length of Pipeline on AC Voltage Profile.
Fig. 3-44 Double Vertical Circuit ...........................................................
Fig. 3-45 Quadruple Vertical Circuit......................................................
Fig. 3-46 Single Delta Circuit ................................................................
CP Interference Course Manual
© NACE International, 2006
June 2007
3:9
3:10
3:11
3:12
3:13
3:13
3:14
3:20
3:20
3:21
3:21
3:22
3:23
3:23
3:24
3:25
3:26
3:27
3:27
3:30
3:31
3:32
3:33
3:33
3:35
3:36
3:36
3:36
3:37
3:37
3:37
3:38
3:39
3:39
3:40
3:44
3:44
3:45
Fig. 3-47 Effect of Phase Conductor Separation ..................................
Fig. 3-48 Phase Arrangements for a Double Vertical Circuit ................
Fig. 3-49 Effect of Phase Arrangement on LEF Magnitude for
Variation of d/s Ratios (and for the specific case
Where ρ/s2 = 1Ω/m, s/h=0.3, and I=1000A) .......................
Fig. 3-50 Simple Pipeline-Powerline Corridor (Plan View)....................
Fig. 3-51 AC Voltage Profile Along an Electrically Short Pipeline
(Uniform Conditions – No Grounding) ................................
Fig. 3-52 Electrical Service Analogy for Pipeline-Powerline Corridor
In Figure 3-50 .....................................................................
Fig. 3-53 AC Voltage Profile Along an Electrically Short Pipeline
(Non-Uniform Conditions – No Grounding).........................
Fig. 3-54 Effect of Grounding One End of Electrical Service
Secondary...........................................................................
Fig. 3-55 Effect of Grounding One End of Pipeline in Figure 3-50 .......
Fig. 3-56 Effect of Grounding Both Ends of Pipeline or Adding
Distributed Grounds............................................................
Fig. 3-57 Effect of an Insulator at the Midpoint of the Pipeline .............
Fig. 3-58 AC Voltage Profile Along an Electrically Long or Lossy
Pipeline (Uniform Conditions – No Grounding)...................
Fig. 3-59 AC Voltage Profile Along an Electrically Long or Lossy
Pipeline (Zero Resistance Ground at Distance = 0) ...........
Fig. 3-60 Effect of an Insulator at the Midpoint of an Electrically
Long Pipeline ......................................................................
Fig. 3-61 Fibrillating Current vs. Body Weight (Various animals – 3
second shock duration).......................................................
Fig. 3-62 Possible Body Current Paths.................................................
Fig. 3-63 Example of Typical Touch and Step Potentials at an
Energized Structure ............................................................
Fig. 3-64a Coefficient of Corrosion at Different Frequencies for
Iron Electrode Denoted as Average Electrode Loss...........
Fig. 3-64b Maximum Penetration Depth as a Function of Test
Duration at Constant Cathode DC Current Density
(2A/m2) and Differing AC Current Density ..........................
Fig. 3-65a Effect of CP Potential on AC Corrosion Rate ........................
Fig. 3-65b Effect of CP Potential on AC Current Density........................
Fig. 3-65c Pit Cluster and Pinhole Perforation (Case History No. 1) ......
Fig. 3-65d Hemispherical Shell of Hardened Soil Surrounding
Anomaly (Case History No. 3) ............................................
Fig. 3-65e Hemisphere of Hardened Soil and Corrosion Pit
(Case History No. 3) ...........................................................
Fig. 3-65f Pinhole Corrosion Failure Following Removal of Repair
Clamp (Case History No. 4)................................................
Fig. 3-65g Pipeline-Powerline Route (Case History No. 4).....................
Fig. 3-65h Nodule of Corrosion Products Protruding Through
Coating (Case History No. 4)..............................................
Fig. 3-65i Corrosion Pit After Removal of Coating and Corrosion
Products (Case History No. 4) ............................................
Fig. 3-65j Effects of Installing Ground Electrodes at Sites A and B
(Case History No. 4) ...........................................................
CP Interference Course Manual
© NACE International, 2006
June 2007
3:46
3:46
3:47
3:49
3:49
3:50
3:50
3:51
3:52
3:52
3:53
3:54
3:55
3:56
3:61
3:63
3:64
3:68
3:71
3:73
3:74
3:76
3:80
3:81
3:82
3:83
3:85
3:85
3:88
Fig. 3-65k Effects of Installing Ground Electrodes on AC Current
Densities (Case History No. 4) ...........................................
Fig. 3-66 Fault Damage to CP Bond.....................................................
Fig. 3-67 Field Estimation of LEF Magnitude Using Horizontal
Wire Method .......................................................................
Fig. 3-68 Soil Resistivity Measurement Using the Wenner Four-Pin
Method................................................................................
Fig. 3-69 Determination of Pipeline Coating Resistance ......................
Fig. 3-70 Determination of Pipeline Internal Impedance.......................
Fig. 3-71 Sectionalization of Pipeline-Powerline Route ........................
Fig. 3-72 Pipeline-Powerline Geometry for Calculation of LEF.............
Fig. 3-73 Typical Series of Curves for Determining LEF.......................
Fig. 3-74 Simple Pipeline-Powerline Corridor (Plan View)....................
Fig. 3-75 Simple Pipeline-Powerline Model ..........................................
Fig. 3-76 Equivalent Circuit for Line-to-Ground Fault ...........................
Fig. 3-77 Distribution of Fault Current Along Powerline........................
Fig. 3-78 Distribution of Fault Current Along Powerline........................
Fig. 3-79 Calculation of Earth Voltage at Pipe due to Faulted Tower ...
Fig. 3-80 Approximate Length of Pipeline Affected by Faulted Tower..
Fig. 3-81 Resistance of Coating Holiday to Earth .................................
Fig. 3-82 Modified Resistance of Coating Holiday to Earth due
to Localized Soil Ionization Effects .....................................
Fig. 3-83 AC Pipeline Voltages Induced by Overhead Faulted
Powerline (Per 1000 A of Fault Current).............................
Fig. 3-84 Motor Operated Valve – Effects of Grounding on Induced
AC and CP Currents ...........................................................
Fig. 3-85 Electrical Isolation of Motor Operated Valve from Pipeline....
Fig. 3-86 Electrical Grounding Schematic of Motor Operated Valve
Showing Two Alternative Locations for a DC Decoupling
Device.................................................................................
Fig. 3-87 Decoupling Device Installed by Electrical Utility Between
Primary and Secondary Grounds .......................................
Fig. 3-88 Isolation-Surge Protector Installed across Isolating Flange...
Fig. 3-89 Electrical Schematic of One Model of Solid-State DC
Decoupling Device..............................................................
Fig. 3-90 DC Decoupling Device Installed Across Insulating Flange
for Lightning Protection.......................................................
Fig. 3-91 AC Current Being Measured Through a Polarization Cell .....
Fig. 3-92 Polarization Cell Construction ...............................................
Fig. 3-93 Corrosion of Plates Within a Polarization Cell .......................
Fig. 3-94 Grounding Cell.......................................................................
Fig. 3-95 Electrolytic Capacitor.............................................................
Fig. 3-96 Failure of Electrolytic Capacitors in Stray Current Area ........
Fig. 3-97 Metal-Oxide Varistors (MOVs)...............................................
Fig. 3-98 Explosion-Proof Surge Protection Device Installed
Across Insulator ..................................................................
Fig. 3-99 Test Station Varieties (left to right): a) Terminals Exposed
To Public; b) Terminals Covered by a Plastic Cap (Locking
or Non-Locking); c) Dead-Front Terminals; d) Aluminum
Test Station with Padlocked Cover.....................................
CP Interference Course Manual
© NACE International, 2006
June 2007
3:89
3:95
3:98
3:99
3:103
3:104
3:107
3:109
3:110
3:111
3:111
3:115
3:116
3:117
3:118
3:119
3:120
3:121
3:123
3:127
3:128
3:129
3:130
3:131
3:131
3:132
3:133
3:133
3:134
3:135
3:135
3:136
3:137
3:138
3:139
Fig. 3-100 a) Zinc Ribbon Anode of Various Sizes; b) Zinc Ribbon
Being Installed in Pipe Trench ............................................
Fig. 3-101 Effect of Gypsum on Restoration of Zinc Potential in
Bicarbonate-Rich Soil .........................................................
Fig. 3-102 Potential of Magnesium Versus AC Current Density
in a Fe-Mg Cell ...................................................................
3:140
3:140
3:141
Tables
Table 3-1
Table 3-2
Table 3-3
Table 3-4
Table 3-5
Effects of 60 Hz AC Body Currents on Humans ....................
Let-Go Currents from Dalziel’s Experiments .........................
Let-Go Currents from Dalziel’s Experiments .........................
Voltage Puncture Levels for Various Holiday-Free Coatings.
Specific Leakage Resistances and Conductances................
CP Interference Course Manual
© NACE International, 2006
June 2007
3:60
3:62
3:63
3:94
3:103
Chapter 4–Telluric Current Interference
4.1 Background Theory ..............................................................
4.1.1
4.1.2
4:1
Distributed Source Transmission Line Equations ...............
Factors that Affect the Induced Electric Field .....................
(a) Solar Cycle Variations................................................
(b) Sun’s Rotational Frequency.......................................
(c) Earth’s Rotation .........................................................
(d) Plasma Magnetic Field Direction ...............................
(e) Proximity of Pipeline to a Sea Coast..........................
(f)
Pipeline Latitude ........................................................
Factors that Affect the Pipeline Lineal Impedance (Z) and
Shunt Admittance (Y)..........................................................
(a) Effect of Coating Quality ............................................
(b) Effect of Isolating Fittings...........................................
(c) Effect of Pipeline Directional Change ........................
4:13
4:13
4:14
4:15
4.2 Measuring the Geomagnetic Intensity and Determining
the Electric Field (E)..............................................................
4:16
4.3 Interference Effects of Telluric Current on Pipelines .............
4:18
4.1.3
4.3.1
4.3.2
4.3.3
4.3.4
4.3.5
General Considerations ......................................................
Corrosion ............................................................................
(a) Theoretical Considerations ........................................
(b) Calculating the Corrosion Rate ..................................
(c) Telluric Corrosion Case Studies on Cathodically
Protected Piping......................................................
Impact on Accuracy of Current and Potential Measurements
...................................................................................
Impact of Telluric Current on Pipeline Coatings .................
Impact on Output of a CP Rectifier .....................................
4.4 Mitigating the Effects of Telluric Current ...............................
4.4.1
4:6
4:8
4:8
4:9
4:9
4:9
4:10
4:12
4:18
4:18
4:18
4:22
4:27
4:29
4:31
4:32
4:33
Mitigating Corrosion Impact ................................................
(a) Making the Pipeline Electrically Continuous and
Grounded ................................................................
(b) Using CP....................................................................
(i) Sacrificial Anodes ................................................
(ii) Impressed Current Systems ................................
Compensating for Measurement Error Caused by ............
Telluric Current ..........................................................
4:33
4:34
4:35
4:39
4.5 Summary ..............................................................................
4:49
Summary of Equations..................................................................
4:51
4.4.2
CP Interference Course Manual
© NACE International, 2006
June 2007
4:33
4:42
Figures
Fig. 4-1
Interaction of Solar Particles on the Earth’s Magnetic Field ..
Fig. 4-2a Plasma Charge Distribution around the Earth during
Quiescent Period ................................................................
Fig. 4-2b Plasma Charge Distribution around the Earth during
a Magnetic Storm................................................................
Fig. 4-3
This Plot Shows the Current Extent and Position of the
Auroral Oval in the Northern Hemisphere, Extrapolated
From Measurements Taken During the Most Recent
Polar Pass of the NOAA POES Satellite for September
16, 2004 at 14:22 UT ..........................................................
Fig. 4-4
Schematic of Geomagnetic Induction Directly into a Pipeline
and the Resulting Change in Pipeline Potential that is
Produced ............................................................................
Fig. 4-5
Quiet Day Variation in the Geomagnetic Field and the
Associated Change in the Electric Field and the Pipe-toSoil Potential.......................................................................
Fig. 4-6
P/S Potential and Telluric Current in a Long Pipeline
Exposed to an Induced Electric Field of 1 V/km,
Having an Impedance of 0.1 Ω /km and an
Admittance of 0.15 Ω /km...................................................
Fig. 4-7
Equivalent Circuit for a Short Section of Pipeline ..................
Fig. 4-8
History of Geomagnetic Effects on Ground Technology........
Fig. 4-9
Pipe-to-soil Potential Variations with Time ............................
Fig. 4-10 Charge Accumulation at the Coast Resulting from Larger
Induced Currents in the Sea Compared to in the Land.
The Charge Accumulation Increases the Electrical
Potential of the Earth’s Surface Near the Coast .................
Fig. 4-11 Electric Field, E, Generated by Seawater Moving with
Velocity, v, Through the Earth’s Magnetic Field, B .............
Fig. 4-12 Geomagnetic Hazard Percentage of Probability of
Occurrence .........................................................................
Fig. 4-13 Telluric Induced Voltage Profile vs Distance for a
Pipeline with Different Attenuation Constants.....................
Fig. 4-14 Calculated Telluric Induced Voltage at the End of a Long
Pipeline as a Function of Coating Conductance for
an East-West Electric Field of 0.1V/km ..............................
Fig. 4-15 Effect of Isolating Fittings on the Telluric Induced Voltage
Profile on an Electrically Short Pipeline ..............................
Fig. 4-16 Effect of Pipeline Directional Change on the Telluric
Induced Voltage..................................................................
Fig. 4-17 Average Occurrence of 3-Hour Intervals with the Magnetic
Activity Index Kp Equal to or Greater than a Specified
Value. Kp=9 Corresponds to a Severe Magnetic Storm ....
Fig. 4-18 Peak Electric Field Magnitudes as a Function of Kp .............
Fig. 4-19 Oxidation Reaction at Pipe Surface During Telluric
Current Discharge in the Absence of CP............................
Fig. 4-20 Reduction Reactions During Negative Cycle Telluric
CP Interference Course Manual
© NACE International, 2006
June 2007
4:1
4:2
4:2
4:3
4:3
4:4
4:5
4:6
4:8
4:9
4:10
4:11
4:12
4:13
4:14
4:14
4:15
4:16
4:17
4:18
and CP Current Pick-up......................................................
4:19
Fig. 4-21 Steel Surface pH versus Applied CP Current Density ...........
4:20
Fig. 4-22 Polarization Curves after Several Days of Potentiostatic
Polarization .........................................................................
4:20
Fig. 4-23 Experimental Anodic Polarization Curve of Steel in
Hydroxide (pH 12.0)............................................................
4:21
Fig. 4-24 Telluric Current Discharge from a Cathodically Protected
Pipe ....................................................................................
4:22
Fig. 4-25 Coefficient of Corrosion at Different Frequencies for
Iron Electrodes Denoted as Average Electrode Loss .........
4:23
Fig. 4-26 Effect on Corrosion Rate of Reversing Direction of
Current Compared to Steady State DC and Length of Time
Between Reversals.............................................................
4:24
Fig. 4-27 Corrosion Current Density at a Coating Defect having an
Applied Voltage of 1.0V in 1000 Ω-cm Soil for
Various Coating Thicknesses .............................................
4:25
Fig. 4-28 Chart Showing the Influence of Anodic Transient Time with
Respect to Corrosion Experienced by Probe in Sandy and
Clay Soil. Line (a) Represents the Corrosion Rate
Expected from Faraday’s Law for the Clay Soil, and
Line (B) for the Sandy Soil, Respectively ...........................
4:26
Fig. 4-29 Corrosion Pit at 112+307 (60 mils/497mils 07:30).................
4:28
Fig. 4-30 Magnetic Field Intensity and Pipe-to-Soil Potential
Superimposed.....................................................................
4:29
Fig. 4-31 Schematic of Potentially Controlled CP System Used to Mitigate
Telluric Current Effects .......................................................
4:30
Fig. 4-32 Current Flow and Calculated OFF Potentials during a
GIC Incident........................................................................
4:31
Fig. 4-33 Telluric Current Through a Bridge Rectifying Element
During a Discharge Cycle ...................................................
4:32
Fig. 4-34 Schematic of a Telluric Bond Switch .....................................
4:34
Fig. 4-35 Mitigation of Telluric Current Discharge Effects Using
Galvanic Anodes.................................................................
4:35
Fig. 4-36 Effect of Connecting and Disconnecting Groups of
Galvanic Anodes to a Pipeline Subjected to Telluric
Current................................................................................
4:36
Fig. 4-37 Maritimes DSTL Results Without Flanges .............................
4:38
Fig. 4-38 Electrical Schematic at a Constant Voltage Transformer
Rectifier During a Positive Telluric Voltage Fluctuation ......
4:40
Fig. 4-39 Pipe Potential and Rectifier Current Output vs Time for
An Impressed Current System Operating in Potential
Control ................................................................................
4:41
Fig. 4-40 Typical Pipe-to-Soil Potential Measurements at Test
Station Having a Steel Coupon and Soil Tube ...................
4:42
Fig. 4-41 Typical Pipe-to-Soil Potential Recording at a Test
Station Using a Coupon/Reference Probe..........................
4:43
Fig. 4-42 Comparison Between Pipe/Coupon Potential with Time
Recorded with Respect to a Copper-Copper Sulfate
Reference on Grade and to a Coupon/Reference Probe
Located at Pipe Depth ........................................................
4:44
CP Interference Course Manual
© NACE International, 2006
June 2007
Fig. 4-43 Pipe-to-Soil Potential Measurement Method to Compensate
For Telluric Current Effects During a Close Interval
CP Survey...........................................................................
Fig. 4-44 CIPS Method Using One Moving and Two Stationary
Data Loggers ......................................................................
Fig. 4-45 Pipe-to-Soil Potential Measurement Method to Compensate
for Telluric Current Effects During a Close Interval
CP Survey...........................................................................
Fig. 4-46 Pipe Potential/Telluric Current Relationship at a Coupon
Test Station.........................................................................
Fig. 4-47 Four Wire Test Lead Arrangement for Measuring
Pipe Current........................................................................
Appendices
Appendix A – Curve Matching
Appendix B – Pipe Data Table
Appendix C – Anode Tables
Appendix D – Wire Size Table
Appendix E – Metric Conversion Table
Appendix F – Dabkowski Paper
NACE RP0177
NACE SP0169
NACE Glossary of Corrosion-related Terms
Course Evaluation
Instructor Evaluation
CP Interference Course Manual
© NACE International, 2006
June 2007
4:45
4:46
4:47
4:48
4:49
CHAPTER 1
STRAY CURRENT INTERFERENCE
1.1
Historical Background
The term “interference” is understood in the pipeline industry as electrical
interference and is defined as “any detectable electrical disturbance on a
structure caused by a stray current where a ‘stray current’ is defined as a current
in an unintended path”.1 This broad definition suggests that the structure,
although often a pipeline, could be any metallic network such as electrical power
grids and communication systems. Furthermore, although the interfering current
is often a direct current (DC) from a cathodic protection (CP) impressed current
source, the current can also originate from any electrical system that uses the
earth either intentionally or inadvertently as a current path. Thus alternating
current (AC) can also be included in the definition.
Electrical interference concerns preceded the use of CP for corrosion control of
pipelines. Telegraph systems were reported2 to interfere with the operation of the
early telephone systems. Lighting systems, first introduced in about 1880,
comprised arcs and incandescent lamps also interfered with the telephone
systems, primarily because both the
telephone system and the lighting
systems used the earth as a current
path. Then, in the late 1800s and
early 1900s, street railways
throughout North America were
electrified.3 They ultimately led to
the corrosion of cast iron
watermains.
Figure 1-1: Early Electric Trolley
(courtesy of East Bay Municipal Utility District, Oakland, CA)4
1
CP3 – Cathodic Protection Technologist Course, NACE International, June 1, 2004, p.3-1.
Anderson, John M., The Fight Over the Highways, IEEE Power Engineering Review, December 1997,
p.45.
3
Anderson, John M., First Electric Street Car, IEEE Power Engineering Review, Oct. 1999, p.32.
4
Lewis, Mark, Once Vagrant Current, Now Impressed Current Cathodic Protection, MP, Vol 36,
July1997.
2
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:2
Corrosion on watermains as a result of interference from a DC transit system was
first reported by Stone & Forbes in 18945, just 6 years after a New England transit
system began operation. In 1901, damage to water and gas mains in Toronto,
Ontario, was reported6 as being due “to railway currents.” The currents
reportedly affected the watermains for two reasons: deterioration of the rail joint
bonds and the practice of bonding the watermains to the rails at certain locations.
The U.S. Bureau of Standards began studying the stray current traction problem
in 1910. The bureau would issue 15 reports by 1921. Many of the investigations
involved field studies, during which temporary electrolysis committees were formed
consisting of interested utility representatives. The corrosion resulting from stray
current was initially referred to as “electrolysis,” a term defined as “the
decomposition of a substance by the application of a current”.7 The widespread
corrosion of iron watermains by stray transit system currents led to the formation
in 1913 of the American Committee on Electrolysis.8
Stray current activity on underground structures arising from transit system
operation is not steady-state but dynamic in terms of current and potential
amplitude. It often reverses direction. Typical structure potential activity was
recorded on smoked charts. These charts collect data as a stylus moving in
response to a changing potential input removes the smoke from the chart, which
is rotated by a clock drive. The dynamic nature of the stray current effect on pipe
potential is shown in Figure 1-2.
5
Stone, C.A. and Forbes, H.C., Electrolysis of Water Pipes, New England Water Works Association, Vol.
9, pp.1894-5.
6
Knudson, A.A., Report on the Joint Investigation and Survey for Electrolysis on the Water and Gas
Mains in the City of Toronto, Ontario, July 1, 1906.
7
The Oxford Encyclopedic English Dictionary, Oxford University Press, 1991.
8
Meany, J.J., A History of Stray Traction Current Corrosion in the United States, NACE, Corrosion’74,
Paper 152, p.3.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:3
Figure 1-2: Pipe-to-Soil Potential Changes due to Transit System Stray Current Activity
were Recorded on Smoked Charts
Because of the variable nature of the stray current activity, it is difficult to predict
how much corrosion would occur. The Bureau of Standards conducted a study9 in
which iron samples where subjected to AC discharge and current pick-up for
different periods of time. The resulting corrosion was compared to corrosion
produced by a steady-state DC of the same current density and discharge period.
The results of this study, reported in 1916, are summarized in Figure 1-3.
9
McCollum, B. and Ahlborn, G.H., Influence of Frequency of Alternating and Infrequently Reversed
Current on Electrolytic Corrosion, Technologic Papers of the Bureau of Standards, U.S. Dept. of
Commerce, No. 72, 1916.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:4
100
90
80
LEGEND:
Soil
Soil + Na2CO3
70
60
50
40
30
20
10
0
-10
1/60S 1/15S
1S
5S
1M 5M 10M 1Hr.
2Days 2Weeks
D.C.
Logarithm of Length of Time of One Cycle
Figure 1-3: Coefficient of Corrosion at Different Frequencies for Iron Electrode
Denoted as Average Electrode Loss
For short periods of reversals, the corrosion was only a small fraction of the
corrosion at steady state. For equal periods of pick-up and discharge, the
corrosion coefficient remained below 20% when the cycle remained below one
hour. This meant that the corrosion occurring from dynamic stray currents was a
function of the frequency. At 60hz the corrosion rate was less than approximately
2% of the steady state value.
R.J. Kuhn, who investigated the effects of transit system stray current activity on
iron water mains in New Orleans, Louisiana, is credited with the discovery of CP.
It occurred to him in 1928 that “ordinary corrosion could be prevented by
reversing these currents”.10 Sir Humphrey Davy11 was the first person on record
to use CP by applying zinc castings to protect the copper sheathing on British
warships in 1824. Although a technical success, Davy’s application was a
10
Kuhn, R.J., Cathodic Protection of Underground Pipe lines from Soil Corrosion, API Proceedings, Nov.
1933, Vol. 14, p.164.
11
Davy, H., Philosophical Transactions of the Royal Society, London, 1824-1825.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:5
practical failure because the copper biofouled when the corrosion was stopped—
thus reducing the speed of these sailing ships. It appears that neither Kuhn nor
any other corrosion practitioner had knowledge of this. Hence, Kuhn is
considered by one source12 as the “father” of CP (certainly as it applies to
pipelines).
Against this backdrop, stray current interference and its corrosion consequences
for underground metallic structures were first evaluated. Today electrolysis
committees exist throughout North America, and methods of mitigation that have
subsequently been developed are commonly utilized. Sources of stray current
interference are not confined to DC transit systems. They now include any
electrical source that uses the earth either intentionally or inadvertently as a
current path. This course addresses these sources and the mitigation methods that
have been developed to mitigate not only the corrosion effects, but other
deleterious consequences of stray current activity.
1.2
Typical Stray Current Circuit Arising from a
Transit System Operation
Figure 1-4 depicts stray current paths originating from the operation of an electric
transit system. Although it is the intent that the DC operating current returns to
the substation via the running rails (IR), some of the load current (IL) will pass
through the earth (Ie) if the rail is in electrolytic contact with the earth. If there is a
metallic structure in the earth, it, too, will carry some of the load current (IS).
Therefore, the load current (IL)—after passing through the locomotive—divides
into parallel paths. The amount of current in each path is inversely proportional to
the resistance of each path relative to the total circuit resistance, as Equation 1-1
indicates.
I path =
where:
12
Ipath
RT
Rpath
IL
=
=
=
=
R T • IL
R path
current in a path
total resistance of parallel paths
resistance of current path
load current
von Baeckmann, W., Schwenk, W., and Prinz, W., Handbook of Cathodic Corrosion Protection, 3rd
edition, Gulf Publishing Co., Houston, TX, 1997, p.16.
CP Interference Course Manual
© NACE International, 2006
January 2008
[1-1]
Stray Current Interference
1:6
DC
substation
O/H power conductor
IL
IR
ground
Is
running
rails
Is
Is
p ic k - u p
metallic structure
(e.g.,watermain)
d is c h a r g e
Ie
Ie
Figure 1-4: Typical Stray Current Paths Around a DC Transit System
Hence, as the resistance of the rail path increases or the resistance of the
alternative stray current path(s) decreases, a greater percentage of the load current
will appear in the stray current path(s).
1.3
Stray Current Charge Transfer Reactions on a
Metallic Structure
Figure 1-5 illustrates the typical stray current situation on an underground
metallic structure that is not electrically connected to the source of stray current.
The stray current pattern consists of a pick-up of stray current from the earth at
one or more locations and the subsequent discharge of stray current to the earth at
one or more locations.
Is
Is
stray current
pick-up
Is
stray current
discharge
Is
Figure 1-5: Typical Stray Current Interference on a Metallic Underground Structure
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:7
The principal charge carriers in the earth are ions. They are electrons in the
metallic structure. For these reasons, electrochemical reactions must transfer the
charge between the structure and earth at both the pick-up and discharge
locations.
At the pick-up location(s), it is through reduction reactions that the electrical
charges are transferred. Depending on the nature of the electrolytic environment,
the reduction reactions can be one or more of the following:
H3O+ + e–
Æ
HO + H2O
[a]
O2 + 2H2O + 4 e–
Æ
4OH–
[b]
2H2O + 2e–
Æ
H2↑ + 2OH–
[c]
Reaction [b] is favored in well-aerated soils and waters; reduction reaction [a] is
favored in acidic soils or waters. Reduction reaction [c], which involves the
breakdown of water molecules to hydrogen gas and hydroxyl ions, can occur
under all conditions if there is sufficient over-voltage applied.
At the discharge location, one or more of the following oxidation reactions
transfers the electrical charge.
M0
Æ
Mn+ + ne–
[d]
4OH–
Æ
O2 + 2H2O + 4e–
[e]
2H2O
Æ
O2 + 4H+ +
[f]
4e–
Reaction [d] tends to occur on most basic metals such as iron, copper, zinc, and
aluminum when the electrolyte has an acid or neutral pH. Reaction [e] is more
likely in electrolytes with a high pH. Reaction [f] is more likely to occur when
the over-voltage reaches the oxygen line. The oxygen line is line “b” on the
Pourbaix diagram for iron (Figure 1-6).
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
-2
1:8
0
2
4
6
8
10
12
14
2
2
1.6
1.6
1.2
b
1.2
0.8
0.4
0
current
pick-up
a
0.8
current
discharge
0.4
3
passivation
0
corrosion
-0.4
-0.4
-0.8
1
-1.2
immunity
-0.8
2
corrosion
-1.2
-1.6
-1.6
-2
16
0
2
4
6
8
10
12
14
16
pH
(assuming passivation by a film of Fe2O3)
Figure 1-6: Simplified pH Pourbaix Diagram for Iron in Water at 25ºC Showing
Potential Shift Direction for Current Pick-up and Discharge at Low pH
The Pourbaix diagram for iron in pure water represents three zones of
thermodynamic stability: corrosion, immunity, and passivity based on a potential
(SHE) vs pH relationship. Line (a) is the hydrogen line and line (b) is the oxygen
line. Water is stable between these two lines. If the potential of iron is shifted to
either of these lines, then oxygen is generated at line (b) and hydrogen gas at line
(a).
For an iron structure without CP that is exposed to a neutral or low-pH water, a
current pick-up will cause the potential to shift in the negative direction toward
the immunity zone and afford the structure some CP. Conversely, at the
discharge location, the potential is shifted in the electropositive direction into the
passive region if not at a low pH—where it would otherwise remain in the
corrosion zone.
On a cathodically protected structure as illustrated in Figure 1-7, where the
electrolyte at the iron surface normally has a high pH, a current discharge
resulting in a positive shift can produce a passive film given by the following
reaction:
Fe + 2H2O Æ Fe(OH)2 + 2H+ + 2e–
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
-2
1:9
0
2
4
6
8
10
12
14
2
2
1.6
1.6
1.2
b
1.2
0.8
0.8
0.4
0
0.4
3
a
passivation
0
corrosion
current
discharge
-0.4
-0.8
1
-1.2
immunity
corrosion
current
pick-up
0
2
4
6
8
-0.4
-0.8
2
-1.2
-1.6
-1.6
-2
16
10
12
14
16
pH
(assuming passivation by a film of Fe2O3)
Figure 1-7: Simplified pH Pourbaix Diagram for Iron in Water at 25ºC Showing
Potential Shift Direction for Current Pick-up and Discharge at High pH
The ferrous hydroxide formed is relatively stable at high pH. Because this
reaction also produces hydrogen ions, the pH will decrease with time.
1.4
Effects of Stray Current on Metallic Structures
It is apparent that the effect of a stray current pick-up and a stray current
discharge from an iron structure from a thermodynamic perspective can cause
corrosion, passivation, or immunity, depending upon the direction of current and
the pH of the aqueous electrolyte at the charge transfer location.
1.4.1 At the Current Discharge Location
Identification of the current discharge site receives considerable attention in stray
current investigations because it is the location where corrosion damage is most
likely to occur on all metallic structures. When a current transfers from a metallic
structure to earth (Figure 1-8), it must do so via an oxidation reaction that
converts electronic current to ionic current.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:10
metal
structure
(electrons)
Is
O
X
I
D
A
T
I
O
N
Is
earth
(ions)
Is
Figure 1-8: Current Discharge from a Metal Structure to Earth via an Oxidation Reaction
The generic oxidation reaction is the corrosion of the metal as in Equation 1-2.
Mo Æ Mn+ + ne–
[1-2]
For steel, the oxidation reaction is:
Feo Æ Fe++ + 2e–
[1-3]
A stray current discharge from a metallic structure may not cause corrosion attack
if the structure is receiving CP (Figure 1-9). Whether the superposition of a stray
current discharge and a CP current pick-up at a metal/electrolyte interface causes
corrosion will depend on time and the relative magnitudes of these two currents.
metal
structure
O
X
I
D
A
T
I
O
N
R
E
D
U
C
T
I
O
N
Is
Is
Is
Icp
Icp
earth
Icp
Icp
Figure 1-9: Superposition of a Stray Current and a Cathodic Protection Current at a
Metal/Electrolyte Interface
CP current transfers across the metal/earth interface via a reduction reaction,
which produces hydroxyl ions in either of the three following reactions:
H3O+ + e– Æ HO + H2O
[1-4]
O2 + 2H2O + 4e– Æ 4OH–
[1-5]
2H2O + 2e– Æ H2Ç + 2OH–
[1-6]
In the presence of a high concentration of hydroxyl ions, a possible oxidation
reaction is given in Equation 1-7. The reaction involves the oxidation of hydroxyl
ions to oxygen and water.
4OH– Æ O2 + 2H2O + 4e–
[1-7]
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:11
This latter reaction does not consume metal atoms; therefore, there is no corrosion
damage. Hence, as long as the polarized potential at the structure electrolyte
interface is not driven more electropositive than the CP criterion (e.g.,
–850mVcse for iron or steel), significant corrosion would not be expected.
If the metal has a surface passive film or is a relatively inert material (such as some
of the materials used for impressed current anodes), then not all of the stray current
need transfer through a corrosion reaction. If the stray current polarizes the metal
surface electropositively to the oxygen line on the Pourbaix diagram, then the
hydrolysis[13] of water molecules by the following reaction 1-8 is likely.
2H2O Æ 4H+ + O2Ç + 4e–
[1-8]
This oxidation reaction does not result in the consumption of the metal surface, but it
does produce an acidic pH from the generation of hydrogen ions.
On an iron or steel structure without CP, the oxidation reaction is usually the
dissolution of the metal according to Equation 1-9
Feo
Æ
Fe++ + 2e–
[1-9]
The severity of corrosion depends on the magnitude of the stray current and time
as related by Faraday’s Law:
Wt =
M
t I corr
nF
[1-10]
where:
Wt = total weight loss at anode or weight of material produced
at the cathode (g)
n = number of charges transferred in the oxidation or
reduction reaction
Icorr = the corrosion current (A)
F = Faraday’s constant of approximately 96,500 coulombs per
equivalent weight of material (where equivalent weight =
M
)
n
M = the atomic weight of the metal that is corroding or the
substance being produced at the cathode (g)
t = the total time in which the corrosion cell has operated (s)
13
Hydrolysis is defined as a double decomposition reaction involving the splitting of water into its ions
and the formation of a weak acid or base or both. CRC Handbook of Chemistry and Physics, CRC
Press, 53rd Edition, 1972-1973, PF-83.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:12
Given the atomic weight of pure iron as 55.85 g and assuming 100% efficiency
and pure DC, the consumption rate of iron as illustrated in Table 1-1 is 9.13
kg/A-y.
Table 1-1: Theoretical Consumption Rates of Various Metals and Substances
Reduced
Species
Oxidized
Species
Al
Cd
Be
Ca
Cr
Cu
H2
Fe
Pb
Mg
Ni
OHZn
Al+++
Cd++
Be++
Ca++
Cr+++
Cu++
H+
Fe++
Pb++
Mg++
Ni++
O2
Zn++
Molecular
Weight, M
(g)
26.98
112.4
9.01
40.08
52.00
63.54
2.00
55.85
207.19
24.31
58.71
32.00
65.37
Electrons
Transferred
(n)
3
2
2
2
3
2
2
2
2
2
2
4
2
Equivalent
Weight, M/n
(g)
8.99
56.2
4.51
20.04
17.3
31.77
1.00
27.93
103.6
12.16
29.36
8.00
32.69
Theoretical
Consumption Rate
(Kg/A-y)
2.94
18.4
1.47
6.55
5.65
10.38
0.33
9.13
33.9
3.97
9.59
2.61
10.7
On pipelines, the total weight loss is usually less important than the penetration
rate. By re-arranging Faraday’s Law, the weight loss per unit time per unit area is
shown to be directly proportional to current density (i = I/A) as in Equation 1-11.
Wt
A tt
=
M
i
nF
[1-11]
Dividing this equation by the density (d) of the metal or alloy produces the
corrosion rate (rcorr), which can be expressed in mm/y (Equation 1-12).
rcorr
=
k M is
nF d
where:
M
n
i
k
d
rcorr
=
=
=
=
=
=
CP Interference Course Manual
© NACE International, 2006
January 2008
atomic weight (g)
number of charges transferred in corrosion reaction
current density (μA/cm2)
unit correction term ≈ 3.156 x 108 mm s/cm yr
density (g/cm3)
penetration rate in (mm/yr)
[1-12]
Stray Current Interference
1:13
Example: Using Equation 1-12 to calculate the penetration rate based on a current
density of 1 A/m2 (10-4 A/cm2):
where:
i = 10-4 A/cm2
d = 7.87 g/cm3
M = 55.85 g
n = 2
F = 96,500 coulombs
then:
rcorr =
3.156 × 10 8 mm s/ cm yr × 55.85g × 10 -4 A/cm 2
2 × 96,500 coulombs × 7.87 g/cm 3
= 1.16 mm/y
Table 1-2 gives the penetration rate, in mpy and 10-3 mm/y, equivalent to a
current density of 1μA/cm2 for a number of common pure metals.
Table 1-2: Electrochemical and Current Density Equivalence with Corrosion Rate
for Some Common Pure Metals
Metal/Alloy
Pure Metals
Iron
Nickel
Copper
Aluminum
Lead
Zinc
Tin
Titanium
Zirconium
Element/
Oxidation
State
Density
(g/cm3)
Equivalent
Weight
(g)
Fe/2
Ni/2
Cu/2
Al/3
Pb/2
Zn/2
Sn/2
Ti/2
Zr/4
7.87
8.90
8.96
2.70
11.4
7.13
7.3
4.51
6.5
27.93
29.36
31.77
8.99
103.6
32.69
59.34
23.95
22.80
Penetration Rate
Equivalent to 1 μA/cm2[1]
(mpy)
10-3 mm/y[2]
0.46
0.43
0.46
0.43
1.17
0.59
1.05
0.69
0.45
11.6
10.8
11.6
10.9
29.7
15.0
26.6
17.4
11.5
Note: [1] A current density of 1 μA/cm2 is approximately = 1 mA/ft2
[2] 10-3 mm/y = 1 μm/y and 1 mpy = 25.4 μm/y
The foregoing corrosion rates apply to stray current situations involving a
continuous DC discharge. Corrosion rates decrease for periodic reversals of DC
and are substantially less for 60Hz AC (Figure 1-3).
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:14
The low corrosion rate for a 60Hz current is attributed to the relatively low
impedance of the interfacial capacitance. The structure/electrolyte interface can
be modeled electrically by a Randle’s Circuit shown in Figure 1-10.
where:
Cdl = double layer capacitance
(1-200 μF/cm2)
Rp = polarization resistance
(1-104 Ω-cm2)
Eac
Rp
Iac,rp
Cdl
steel
Re
Re = resistance of steel surface
to remote earth
potential
difference (volts)
Eoc =
Iac
Iac = total AC crossing the interface
soil (electrolyte)
Ia,rp = total AC through polarization
resistance
Ia,dl = total AC through double-layer
capacitance
Iac,dl
Figure 1-10: Randle’s Electrical Circuit Model of a Metal/Electrolyte Interface
This circuit model illustrates that the interface is not simply a resistance but a
parallel combination of the polarization resistance (Rp) and a capacitor (Cdl)
called the double-layer capacitance. Unlike DC, AC can pass through the doublelayer capacitance. There is no mass transfer in this current path and hence no
corrosion polarization results from current transfer in this path. The proportion of
AC (Iac,dl) through the double-layer capacitor is a function of the relative
impedance of this path compared to the polarization resistance.
The reactance (Xcdl) of the double-layer path is given by the following equation:
Xc dl
=
1
2π f C dl
[1-13]
where:
f = frequency (Hz)
Cdl = capacitance (farads)
Xcdl = reactance (ohms)
Assuming a 1cm2 surface area and mid-range values of both the polarization
resistance and the double-layer capacitance as follows, then the proportion of AC
through the capacitor can be calculated.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
Assume:
1:15
Cdl = 100 μf/cm2
Rp = 103 Ω−cm2
Using Equation 1-13:
Xc dl
=
1
2π 60 × 100 × 10 -6
=
10 4
376.8
=
10 4
120π
= 26.54 Ω
The total impedance Zt to 60Hz AC of the parallel combination of the
polarization resistance (Rp) and the double-layer capacitance is therefore:
therefore:
1
Zt
=
1
+
Rp
1
Zt
= 10 -3 + 37.7 × 10 −3 = 38.7 × 10 −3
Zt
=
10 3
38.7
1
Xc dl
=
1
+
10 3
1
26.54
= 25.8 Ω
Then the proportion of AC current through the double-layer capacitance is:
I ac,dl
I ac,dl
=
=
Z t I ac, t
Xc dl
25.8Ω
× I ac, t = 0.974 I ac, t or 97.4%
26.5
Accordingly, only approximately 2.6% of the AC would pass through the
polarization resistance and only the positive half-cycle of the current would
be involved in the corrosion reaction.
1.4.2 At Area of Current Pick-Up
At the area of current pick-up, a negative shift will result in cathodic polarization.
If the foreign structure is mild steel, then there is a beneficial effect because the
structure is receiving some measure of CP. If the structure is coated and has its
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:16
own CP system, the additional polarization from the stray current pick-up may
result in cathodic blistering of the coating.
If the foreign structure is not mild steel but is made of an amphoteric metal such
as aluminum, lead, or zinc, then the high pH developed at the structure/earth
interface caused by the reduction reaction can effect “cathodic” corrosion.
Amphoteric metals such as aluminum are susceptible to corrosion at both high
and low pH. Figure 1-11 shows this phenomenon for aluminum.
(a) Aluminum
(b) Lead
Figure 1-11: Theoretical Conditions of Corrosion, Immunity, and Passivation of
(a) Aluminum at 25ºC and (b) Lead at 25º C
Source: Pourbaix, M., Atlas of Electrochemical Equilibria in Aqueous Solutions, National Association of Corrosion
Engineers, Houston, TX, 1974, p.172
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:17
70
Al
60
Zn
50
40
30
20
10
14
13
12
Alkaline
11
10
9
8
7
pH
6
5
4
3
2
1
Acid
Figure 1-12: Comparison of Zn and Al Coatings for Corrosion Resistance as Functions of pH
One can see that aluminum is particularly sensitive to high pH attack. Aluminum is
often used underground for water irrigation systems, gas distribution piping in rural
areas, AC secondary distribution conductors, and the sheathing on communication
cables. Zinc and lead are also amphoteric metals. The corrosion rate of zinc, as
indicated in Figure 1-12, is not as high as aluminum in alkaline conditions but is
much greater in acid conditions. Lead sheathing was commonly used on
belowground AC power cables. Not only are these amphoteric materials susceptible
to corrosion according to Faraday’s Law at rates indicated in Table 1-2 at stray
current discharge locations, but also at stray current pick-up locations.
Prestressed concrete cylinder pipe (PCCP) used for both water and sewage
transmission is composed of a mild steel inner cylinder, over which a highly
stressed steel wire is wound to give the concrete/steel cylinder strength. Typical
cross-sections of the two types of PCCP are shown in Figures 1-13a and 1-13b.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:18
Prestressing Wire and Wire Fabric
Around Bell or Thicker Bell Ring
and Wire Fabric
Cement - Mortar Coating
Grout Joint
After Installation
Prestressed Wire
Steel Cylinder
Concrete Core
Rubber Gasket
Steel Bell Ring
Cement Mortar Placed
in Field or Other Protection
Steel Spigot Ring
a. Lined Cylinder Pipe
Cement - Mortar Coating
Grout Joint
After Installation
Concrete Core
Steel Spigot Ring
Prestressed Wire
Rubber Gasket
Cement Mortar Placed
in Field or Other Protection
Steel Cylinder
Steel Bell Ring
b. Embedded Cylinder Pipe
Figure 1-13: Typical Section Through a Joint in Two Types of PCCP
Source: Prestressed Concrete Pressure Pipe-Steel Cylinder Type for Water and Other Liquids, AWWA Standard C301,
American Water Works Association, Denver, CO
The prestressing wire in these pipes is normally cold drawn steel with a yield
strength in the order of 200 ksi. The cold-worked hardened surface of the wire
makes it susceptible to hydrogen embrittlement. It is recommended that the
polarized potential be limited to –970 mVcse or less negative to minimize the
production of atomic hydrogen. If a stray current causes excessive cathodic
polarization, then a catastrophic failure could occur.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:19
If the foreign structure is coated at the stray current pick-up site, then coating
blistering or disbondment can occur. Coating blistering is caused by the pressure
build-up beneath the coating due to the movement of water through the coating,
due to electroendosmosis. Electroendosmosis is defined as “the inward flow of a
fluid through a permeable membrane due to an electric field”. The high pH
produced by the reduction reaction at the metal surface can attack the coating
adhesion bonds or a surface oxide layer, resulting in coating disbondment.
DC
H2O
_
_OH OH _
OH
_
_
OH
OH
_
_
_
_
OH OH
OH OH
H2O
soil
metal substrate
Figure 1-14: Cathodic Blistering/Disbondment of Protective Coating
1.4.3 Along the Structure
Stray current in a metallic structure does not usually cause damaging effects
between the stray current pick-up and discharge locations unless the current is
very large or the structure is not electrically continuous. If the structure is
electrically discontinuous (as is often the case with cast iron water distribution
piping or PCCP transmission piping), the structure resistance (Rs) is greater than
if it were electrically continuous, which reduces the magnitude of Is, but creates a
current discharge/current pick-up pattern at each electrical discontinuity (Figures
1-15a and 1-15b).
electrically discontinuous joints
Is
Is
Is
Figure 1-15a: Stray Current Discharge and Pick-Up Around an
Electrically Discontinuous Joint Through the Earth
In many of these structures not every joint is discontinuous, but localized
corrosion will occur on the discharge side of the discontinuous joints.
Furthermore, on water and sewer piping, there is not only a soil path for the stray
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:20
current but also an internal path through the aqueous medium as illustrated in
Figure 1-15b.
rubber seal
aqueous medium
Figure 1-15b: Stray Current Discharge and Pick-Up Through the Internal Aqueous Medium
Around an Electrically Discontinuous Bell and Spigot Joint on Cast Iron Piping
Current in an AC distribution system can also affect the transformation
characteristics in distribution transformers. At the AC distribution transformer,
which supplies the AC service for an impressed current transformer-rectifier, a
ground cable is normally run from the AC neutral to a ground rod at the base of
the service pole. The ground rod, being relatively close to the groundbed, will
pick up stray current. The distribution neutral and the AC phase conductor will
carry the stray current to ground at remote transformers because DC does not
encounter a high resistance through the primary winding.
This circuit is
illustrated schematically in Figure 1-16.
Remote Distribution
Transformer
CP AC Distribution
Transformer
L1
Is,2
Is,2
N
N
T/R
N
L2
L
Is,1
Is
CP
groundbed
Is
Figure 1-16: Stray Current Circuit in an AC Electrical Distribution System
A DC in the primary or secondary windings of a transformer will produce a
magnetic flux in the transformer core that will tend to saturate the core and thus
spoil its voltage transformation properties. This is a deleterious effect that is in
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:21
addition to the corrosion damage that results from the stray current discharging
off the ground rod at the remote distribution transformer.
1.5
Summary
Stray current is an irrevocable factor to which all metallic underground structures
are exposed because so many electrical systems use the earth as a current path.
The following list of possible stray current sources is extensive:
•
•
•
•
•
•
•
•
•
CP systems
High-voltage AC transmission systems
Low-voltage AC distribution systems
High-voltage DC transmission systems
AC and DC transit systems
Welding operations
Geomagnetically induced currents
Low-frequency communication systems
Land-line telephone systems.
Pipeline corrosion control practitioners are often acutely aware of the various
sources of stray current, yet impressed current CP systems remain among the
most prevalent stray current sources. As public pressure mounts to force more
stray current sources into joint-use corridors, stray current control becomes
increasingly important and decidedly more complex.
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:22
Summary of Equations
I path =
[1-1]
where:
Ipath
RT
Rpath
IL
=
=
=
=
R T • IL
R path
page 1:5
current in a path
total resistance of parallel paths
resistance of current path
load current
[1-2]
Mo Æ Mn+ + ne–
page 1:10
[1-3]
Feo Æ Fe++ + 2e–
page 1:10
[1-4]
H3O+ + e– Æ HO + H2O
page 1:10
[1-5]
O2 + 2H2O + 4e– Æ 4OH–
page 1:10
[1-6]
2H2O + 2e– Æ H2Ç + 2OH–
page 1:10
[1-7]
4OH– Æ O2 + 2H2O + 4e–
page 1:10
[1-8]
2H2O Æ 4H+ + O2Ç + 4e–
page 1:11
Feo
[1-9]
Æ
Wt =
[1-10]
Fe++ + 2e–
M
t I corr
nF
page 1:11
page 1:11
where:
Wt = total weight loss at anode or weight of material produced
at the cathode (g)
n = number of charges transferred in the oxidation or
reduction reaction
Icorr = the corrosion current (A)
F = Faraday’s constant of approximately 96,500 coulombs per
equivalent weight of material (where equivalent weight =
M
)
n
M = the atomic weight of the metal that is corroding or the
substance being produced at the cathode (g)
t = the total time in which the corrosion cell has operated (s)
CP Interference Course Manual
© NACE International, 2006
January 2008
Stray Current Interference
1:23
Wt
A tt
[1-11]
M
i
nF
=
page 1:12
rcorr
[1-12]
=
kMi
nF d
page 1:12
where:
M
n
i
k
d
rcorr
[1-13]
Z dl
=
=
=
=
=
=
=
atomic weight (g)
number of charges transferred in corrosion reaction
corrosion current density (μA/cm2)
unit correction factor ≈ 3.156 x 108 mm s/cm y
density (g/cm3)
penetration rate in (mm/yr)
1
2π f C dl
where:
f = frequency (Hz)
Cdl = capacitance (farads)
Zdl = impedance (ohms)
CP Interference Course Manual
© NACE International, 2006
January 2008
page 1:14
CHAPTER 2
DC INTERFERENCE
2.1
Introduction
The term “interference” in cathodic protection (CP) parlance means electrical
interference as opposed to physical or chemical interference. Hence interference
can be defined as any detectable electrical disturbance on a structure caused by a
stray current. In turn, a stray current is defined as a current in an unintended path.
Many electrical systems rely on the earth as a conducting medium either for the
main transmission of electrical energy (as with CP systems) or as an electrical
ground. Still, other systems—such as electrified transit systems—may not be
adequately isolated from ground. Regardless, any electrical system that is in
contact with the earth is a possible source of stray currents. As illustrated in
Figure 2-1, a current entering the earth at point “A” has many parallel paths
available at point “B.”
In
I4
A
I3
I2
I1
Rn
R4
R3
B
R2
R1
Figure 2-1: Parallel Current Paths in the Earth
The amount of current in each path is inversely proportional to the resistance of
each path. It can therefore be argued that current will take all available paths. If
point “A” is considered an impressed current groundbed connected to the positive
terminal of a transformer-rectifier and point “B” is a pipeline connected to the
negative terminal, then the parallel current paths may all have similar
resistances—in which case all the currents are the same. This is only possible in
homogeneous soil where points “A” and “B” are a long distance apart and where
the pipe has no lineal resistance.
However, if the soil resistivity varies or the pipe has lineal resistance, the current
paths will have unequal resistances as illustrated in Figure 2-2.
CP Interference Course Manual
© NACE International, 2006
January 2008
DC Interference
2:2
R4,e
R1,e
R3,e
R2,e
T/R
I2
I1
I3
I4
R3,p
R2,p
R4,p
R1,p
drain point
Figure 2-2: Parallel Current Paths in a Pipeline Cathodic Protection System
It is apparent that each current path is composed of resistance through the earth
(Re) plus a resistance through the pipe (Rp) from the point of current pick-up back
to the drain point. Therefore, the total resistance (Rt,i) of each parallel path is
different and given by Equation 2-1.
Rt,i = Ri,e + Ri,p
[2-1]
Because the length of each current path is different both in the earth and in the
pipe in any direction away from the drain point, the total resistance of each current
path will increase with distance from the drain point. The amount of current in
each path is given by Equation 2-2
Ii =
where:
R t ,n
R t ,i
It
[2-2]
Rt,n = the total resistance of n parallel paths
1
1
1
1
+
+
+
R4
R3
R2
R1
1
=
R t ,n
⋅⋅⋅
1
Rn
and:
It = I1 + I2 + I3 + I4 … In
In stratified soil conditions where the soil resistivity or cross-sectional area of each
stratum is different, even current paths of equal length will not have equal resistances as
illustrated in Figures 2-3 and 2-4.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:3
T/R
ρmod
till
R1,e
ρlow
clay
R2,e
ρhigh
R3,e
rock
Figure 2-3: Parallel Current Paths in Vertically Stratified Soil Conditions
ρhigh
ρlow
R4,e
R1,e
R3,e
R2,e
T/R
I2
I1
I3
R2,p
I4
R3,p
R4,p
R1,p
drain point
Figure 2-4: Parallel Current Paths in Horizontally Stratified Soil Conditions
It is more common than not for soil geology to be stratified both vertically and
horizontally and for the current in the low-resistivity soils to be proportionately greater
than the high- or moderate-resistivity soils. Furthermore, the stratification need not be
caused by different soils but can be due to similar soils with different moisture content.
In the vertically stratified soils, the resistance of the current paths is not only a function of
soil resistivity but also dependent upon the cross-sectional area of the current path
(Equation 2-3).
L
[2-3]
R i,e = ρ s
A x,s
where:
Ri,e = resistance of the current path (ohm [Ω])
ρs = resistivity of the soil
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:4
L = length of current path
Ax,s = cross-sectional area of soil path
From a point source electrode like a CP groundbed, the cross-sectional area of the
soil increases exponentially with distance from the electrode. Therefore, the
resistance of each current path is not linear with distance from the source.
Soil resistivities (ρs) are typically in the range of 103 to 106 Ω-cm whereas metal
resistivities (ρm) are in the range of 10-5 to 10-6 Ω-cm. Hence the ratio of
metal/soil resistivity can range from:
ρm
10 -6
10 -5
=
to
ρs
10 6
10 3
ρm
= 10 -8 to 10 -12
ρs
Put in perspective, for high soil resistivity (e.g., 106 Ω-cm) a metal object in the
earth having a cross-sectional area of 100 cm2 or 10-2 m2 is equivalent in resistance
to a cross-section of soil that is given by Equation 2-4.
ρm
=
ρs
substituting:
ρm
= 10 -12
ρs
then:
A x,s =
A x,s =
A x,m
A x,s
[2-4]
A x,m
10 -12
10 -2
10 -12
= 1010 m 2
That is, a metal conductor having a 0.01-m2 cross-sectional area is equal to a soil
cross-sectional area of 1010 m2 if the soil resistivity is 106 Ω-cm. This means that
when a metallic structure is present in the earth, it can be a very attractive current
path—thus resulting in a stray current (Is) in the metallic structure as illustrated in
Figure 2-5.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:5
metallic structure
Is
Is,4
Is,5
Is,3
Is,2
Is
Is,1
R4,e
R1,e
R3,e
R2,e
T/R
I2
I1
I3
R2,p
I4
R3,p
R4,p
R1,p
drain point
Figure 2-5: Stray Current in a Metallic Structure Parallel to a Cathodically Protected Structure
The stray current is picked up on the foreign metallic structure where it is being
impacted by the groundbed anodic voltage gradient. If there is no direct electronic
path between the foreign structure and the pipeline, then the current will discharge
from the metallic structure remote from the pick-up area.
The amount of stray current in the metallic structure is a function of the resistance
of the stray current paths and the driving voltage left at the location where the
foreign metallic structure intersects the anodic voltage gradient.
Currents from a single electrode, placed vertically in the earth, produce a voltage
drop in the soil near the electrode that forms equipotential surfaces perpendicular
to the current paths (Figure 2-6).
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:6
Va,re
9
8
Vx,re
7
6
Va,x
5
4
3
2
1
0
x
CL
distance
Va,x
Figure 2-6: Voltage vs. Distance from a Vertically Oriented Anode
An equipotential surface has the same voltage difference between the anode and
any place on its surface. Projection of each equipotential surface at grade and
denoting its voltage and distance produces the voltage drop (Va,x) profile in the
earth with distance from the anode, as illustrated.
The voltage rise (Vx,re) in the earth with respect to remote earth can be calculated
using Equation 2-5.
Vx,re =
I ρ s ⎡ ⎛⎜ L +
⎢ln
2πL ⎢ ⎜⎝
⎣
L2 + x 2
x
⎞⎤
⎟⎥
⎟⎥
⎠⎦
where:
Vx,re = voltage rise in earth with respect to remote earth at
a distance “x” from the anode
CP Interference
© NACE International, 2006
January 2008
[2-5]
DC Interference
2:7
I = anode current output
ρs = soil resistivity
L = length of anode
For example, for a 10-m-long anode in 3000- Ω-cm soil having an output of 10A,
the voltage rise at 100 m is:
Vx,re =
10A × 30 Ω - m ⎡⎢ ⎛⎜ 10m +
ln
2π 10m
⎢ ⎜
⎣ ⎝
(10m )2 + (100m )2 ⎞⎟⎤⎥
100m
⎟⎥
⎠⎦
⎡ ⎛ 10m + 100.5m ⎞⎤
= 4.77 ⎢ln ⎜
⎟⎥
100m
⎠⎦
⎣ ⎝
Vx,re
= 4.77 [ln 1.105]
= 4.77 [0.1]
= 0.48V
If a metallic structure was present 100m from this anode, it would be subjected to
approximately 0.5V between that point and remote earth. This is the driving
voltage that would produce a stray current in the structure.
Most impressed current groundbeds, however, do not simply comprise a single
electrode placed vertically in the earth. Rather, they typically consist of a number
of electrodes placed either vertically or horizontally and interconnected by a
common header cable ( Figures 2-7a and 2-7b).
Rgb,v
s
L
Ra,1
d
Ra,2
Ra,3
Ra,n
Figure 2-7a: Multiple Vertical Anodes Connected to a Common Header Cable
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:8
Rgb,h
t
d
CL
s
L
Figure 2-7b: Multiple Horizontal Anodes Connected to a Common Header Cable
Calculation of the voltage rise to remote earth becomes more complicated for
multiple anode groundbeds. The following procedure, which equates the resistance
of the multiple anode groundbed to the resistance of hemispherical electrode, is a
method of estimating the resistance remaining to remote earth. The estimate is
then multiplied by the current output to obtain the voltage rise to remote earth.
The first step is to calculate the resistance to remote earth of the multiple anode
array using Sunde’s equation.
Rv
=
⎧⎛ 8 L ⎞
⎫
ρ
2L
ln (0.656N) ⎬
⎟ −1+
⎨⎜ ln
2 π NL ⎩⎝ d ⎠
s
⎭
[2-6]
where:
Rv
ρ
L
d
s
=
=
=
=
=
N =
resistance of multiple vertical anodes to remote earth (Ω)
soil resistivity (Ω-cm)
length of anode (cm)
diameter of anode (cm)
anode spacing (cm)
number of anodes
Note that this equation is simply Dwight’s equation divided by “N” with a
“crowding” correction factor added.
Example Calculation:
As an example, calculate the resistance of 10 vertical anodes, each anode
being a 1.5-m-long high silicon iron anode in a 30-cm. diameter by 2-m-long
column of metallurgical coke. The anode spacing is 5 m and the soil
resistivity is 6,000 Ω-cm.
d = 0.3 m
L = 2m
S = 5m
CP Interference
© NACE International, 2006
January 2008
ρ = 60 Ω-m
N = 10
DC Interference
2:9
Therefore:
Rn =
60 Ω - m
2 π 2m × 10 anodes
⎧⎛ 8 × 2 m ⎞
⎫
2× 2 m
ln (0.656 × 10 anodes)⎬
⎟ −1+
⎨⎜ ln
5m
⎩⎝ 0.3 m ⎠
⎭
= 0.478 {(3.98) – 1) + 0.8 (1.88)}
= 0.478 {4.484}
= 2.14 Ω
This resistance is then equated to an equivalent hemisphere in order to
determine the hemisphere radius (r) where the equation for the resistance to
remote earth of a hemispherical electrode is given in Equation 2-7 as follows:
Rh
where:
=
ρ
2πr
[2-7]
ρ = resistivity (Ω-m)
r = radius of hemispherical electrode (m)
Rh = resistance to remote earth (Ω)
Icp
r1
r
Figure 2-8: Hemispherical Electrode
The radius of a hemispherical electrode having an equivalent resistance as the
multiple anode groundbed is calculated by rearranging the previous equation.
CP Interference
© NACE International, 2006
January 2008
r =
ρ
2π Rh
r =
60 Ω - m
6.28 × 2.14 Ω
[2-8]
= 4.46 m
DC Interference
2:10
Then the equivalent hemisphere has a radius of 4.46 m and the resistance
included in the earth to a distance r1 is given by the following equation:
=
R
ρ
2π
⎛1
1⎞
⎜⎜ − ⎟⎟
r1 ⎠
⎝r
[2-9]
Therefore 100m from the impressed current groundbed will incorporate a
resistance of:
R 100
=
60 Ω - m ⎛ 1
1 ⎞
−
⎜
⎟
6.28 ⎝ 4.46 m
100 m ⎠
= 9.55 (0.2242 – 0.0100)
= 9.55 (0.2142)
= 2.04 Ω
Then the resistance between a point in the earth 100 m from the center of the
hemispherical electrode and remote earth is:
R100 →∞ =
2.14 – 2.04 = 0.10 Ω
and the voltage rise per ampere of current put out by the groundbed will be
100 mV/A.
Hence, a pipeline located 100 m from the 10 anode groundbed operating at
10A output would be subjected to 1 V with respect to remote earth. How
much interference current (Is) is picked up by the pipeline would be a
function of the pipeline resistance to earth in the pick-up area (Rs,e), the
longitudinal resistance (Rs) of the pipeline between the current pick-up and
discharge locations, and the resistance to remote earth (Rs,re) at the discharge
location (Figure 2-9).
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:11
Ra,re
Icp
Rc,a
Icp
'
A
Rs,e
Is
B
Rs
Rc,p
Rs,re
remote
earth
Icp
Rp,re
where:
Icp
=
Icp
'
+ Is
Rc,a & Rc,p = cable resistances
Ra,re = anode resistance to remote earth
Rp,re = pipe resistance to remote earth
Rs,e = resistance of foreign pipe to earth in
a stray current pick-up area
Rs,re = foreign structure resistance to remote earth
Rs = longitudinal resistance of foreign structure
between pick-up and discharge sites
Figure 2-9: Cathodic Protection Circuit Model with Foreign Structure
Intercepting the Anode Gradient
Calculation of the pipe-to-earth resistance can be carried out by a number of
methods. For electrically short lengths of bare pipe (i.e., where attenuation is
not significant) Equation 2-10 can be used.
R s,e
ρ
L
d
t
where:
=
=
=
=
=
⎧ (L )2 ⎫
ρ
ln ⎨
⎬
2πL
⎩ td ⎭
[2-10]
soil resistivity
length of pipe
diameter of pipe
depth below grade
Example Calculation:
Assuming a 100 m long, 0.25 m diameter pipeline at 1 m depth in 60 Ω-m
soil, the pipe resistance would be:
R s,re
=
⎧ (100 )2 ⎫
60 Ω - m
ln ⎨
⎬
6.28 × 100 m
⎩1 × 0.25 ⎭
= 0.096 Ω × 10.6
= 1.02 Ω
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:12
If the pipe is coated, then the voltage rise in the earth at the pipe will appear
across the coating. In this case, the resistance of the pipe is the series
combination of Equation 2-10 plus the resistance across the coating (Rs,c).
To obtain Rs,c the specific coating resistance (r′e) is needed.
Accordingly, given a good-quality coating having a specific coating
resistance of 5 × 103 Ω-m 2 from Table 2-1 in 1000 Ω-cm soil, the specific
coating resistance in 6000 Ω-cm soil (r′c @ 6000 Ω-cm) is then obtained by
multiplying the specific coating resistance at 1000 Ω-cm (r′c @ 1000 Ω-cm)
by the ratio of the actual soil resistivity divided by 1000 Ω-cm.
rc′@ 6,000 Ω-cm = rc′@ 1,000 Ω-cm ×
6,000 Ω - cm
1,000 Ω - cm
= 5 × 103 Ω-m 2 × 6
= 3 × 104 Ω-m 2
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:13
Table 2-1: Specific Leakage Resistances and Conductances in 1000 Ω-cm Soil or Water
Long Pipelines
with
Few Fittings
Average Specific
Coating Conductance
g′c
Average Specific Coating
Resistance
r′c
Quality of Work
Siemens/ft2
Siemens/m2
Ω-ft2
Ω-m2
Excellent
<1 x 10-5
<1 x 10-4
>105
>104
Good
1 x 10-5 to 5 x 10-5
1 x 10-4 to 5 x 10-4
2 x 104 to 105
2 x 103 to 104
Fair
5 x 10-5 to 1 x 10-4
5 x 10-4 to 1 x 10-3
104 to 2 x 104
103 to 2 x 103
Poor
Bare Pipe
(2” to 12”)
(5cm to 30cm)
>1 x 10-4
>1 x 10-3
<104
<103
4 x 10-3 to 2 x 10-2
4 x 10-2 to 2 x 10-1
50 to 250
5 to 25
Gas or Water
Distribution with
Many Fittings
Average Specific
Coating Conductance
g′ c
Average Specific Coating
Resistance
r′c
Quality of Work
Siemens/ft2
Siemens/m2
Ω-ft2
Ω-m2
Excellent
<5 x 10-5
<5 x 10-4
>2 x 104
>2 x 103
Good
5 x 10-5 to 1 x 10-4
5 x 10-4 to 1 x 10-3
104 to 2 x 104
103 to 2 x 103
Fair
1 x 10-4 to 5 x 10-4
1 x 10-3 to 5 x 10-3
2 x 103 to 104
2 x 102 to 103
Poor
Bare Pipe
(2” to 12”)
(5cm to 30cm)
>5 x 10-4
>5 x 10-3
<2 x 103
<2 x 102
4 x 10-3 to 2 x 10-2
4 x 10-2 to 2 x 10-1
50 to 250
5 to 25
Therefore the coating resistance (Rs,c) of the 100 m long pipe is:
R s,c =
where:
therefore:
rc′@ 6,000 Ω-cm
As
As = surface area of pipe
= πdL
R s,c
3 × 10 4 Ω − m 2
=
π × 0.25m × 100 m
= 382 Ω
and the total resistance (Rs,re) of the 100m of coated pipe will be:
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:14
Rs,e = Rs,c + Rs,re
= 382 Ω + 1.02 Ω
= 383 Ω
[2-11]
The resistance of the coated pipe in the pick-up area is primarily the
resistance across the coating.
Assuming the interference situation illustrated in Figure 2-5, the interference
current will discharge in an endwire pattern as illustrated in Figure 2-10.
discharge
Ecorr
pick-up
Ep
Figure 2-10: Potential Profile Along the Interfered-with Structure
The resistance looking left (RS,L) and right (RS,R) from the pick-up location
will be affected by attenuation if the length of pipe is relatively long.
IS
RS,L
RS,R
Figure 2-11: Electrical Model for Interfered-with Pipe
The total resistance of the pipe to remote earth is the parallel combination of
the two resistances. Therefore:
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:15
=
R s,re (discharge)
R S, L × R S, R
[2-12]
R S, L + R S, R
The resistance looking along a structure where attenuation is a factor is given
by the following equation.
RS,O = RG coth αx
[2-13]
where: RG = characteristic resistance
α = attenuation constant
x = length of pipe
The attenuation constant α is a function of the leakage resistance (RL) and the
lineal resistance (Rm).
or
Rm
Rm
RS,L
Rm
RS,R
RL
RL
RL
Figure 2-12: Attenuation Model
The attenuation constant is calculated from the Equation 2-14:
α =
where:
Rm
RL
[2-14]
Rm = lineal resistance of the pipe
RL = leakage resistance of pipe to earth
R m = ρm ×
where:
Rm
ρm
L
Ax
=
=
=
=
lineal resistance of the pipe
resistivity of pipe material
length of pipe section
cross-sectional area of pipe
CP Interference
© NACE International, 2006
January 2008
L
Ax
[2-15]
DC Interference
2:16
RL =
and where:
RL
r′c
L
AS
=
=
=
=
rC′
AS
[2-16]
leakage resistance of pipe to earth
specific resistance of pipe coating
length of pipe section
surface area of section = πdL
Example Calculation:
For 100m long, 0.25m diameter (10-in dia.) schedule 40 pipe having an
outside diameter (OD) of 27.3cm (Table B-1 from Appendix B) and an inside
diameter (ID) of 25.4 cm.
α =
Rm
RL
Rm
Rm
=
18 × 10 −6 Ω − cm × 10,000 cm
{(27.3 cm)
4
π
2
− (25.4 cm )
2
}
=
1.8 × 10 − 2 Ω − cm 2
0.785 745.3 cm 2 − 645.2 cm 2
=
1.8 × 10 − 2
78.6
{
=
}
2.29 × 10 -4 Ω/100m
The leakage resistance was previously calculated (Eqn. 2-11) at 383 Ω for a
100 m length of pipe having a good coating in 6,000 Ω-cm soil.
Therefore the attenuation constant is:
α =
=
2.29 × 10 -4 Ω
383 Ω
0.598 × 10 -6
= 0.773 × 10 -3
The resistance looking both ways from the center of the interfered-with pipe
can be determined using Equations 2-11 and 2-13. But if the pipe is
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:17
infinitely long, the resistance looking into it is just the characteristic
resistance (i.e., RS,O = RG) and the characteristic resistance is given by
Equation 2-16.
R S,O = R G =
Rm × RL
=
2.29 × 10 -4 Ω × 383 Ω
=
8.77 × 10 -2 Ω 2
[2-17]
= 0.296 Ω
Therefore the resistance of the pipe to remote earth (RS,re) from Equation 212 is:
R S, re (discharge) =
0.296 Ω × 0.296 Ω
0.592 Ω
= 0.148 Ω
Thus the total circuit resistance (RT) related to the interfered with pipe circuit
is the sum of the resistance in the pick-up area and the discharge area. In this
case:
RT = 383 Ω + 0.148 Ω
The coating resistance dominates this circuit and limits the stray current
magnitude.
A similar voltage drop occurs in the earth around a bare pipeline as indicated in
Figure 2-13.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:18
current path
equipotential
surface
Figure 2-13: Voltage Gradient in the Earth Around a Cathodically Protected Bare Pipeline
The typical CP circuit can then be modeled as a series circuit shown in Figure 214.
Ra,re
Rc,a
remote
earth
Rc,p
Rp,re
where:
Rc,a & Rc,p = cable resistances
Ra,re = anode resistance to remote earth
Rp,re = pipe resistance to remote earth
Figure 2-14: Cathodic Protection Circuit Model
If a metallic structure is located in the earth as shown in Figure 2-5 then it will
intercept the anode voltage gradient such that there will be a parallel path inserted
into the model as illustrated in Figure 2-15.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:19
Ra,re
Icp
Rc,a
A
Icp
'
Rs,e
Is
B
Rs
Rc,p
Rs,re
remote
earth
Icp
Rp,re
where:
Icp
=
Icp
'
+ Is
Rc,a & Rc,p = cable resistances
Ra,re = anode resistance to remote earth
Rp,re = pipe resistance to remote earth
Rs,e = resistance of foreign pipe to earth in
a stray current pick-up area
Rs,re = foreign structure resistance to remote earth
Rs = longitudinal resistance of foreign structure
between pick-up and discharge sites
Figure 2-15: Cathodic Protection Circuit Model with Foreign Structure
Intercepting the Anode Gradient
The presence of the foreign structure has introduced a parallel circuit into the
model where the voltage drop between point “A” and remote earth is applied to
the foreign structure. This will lower the overall resistance of the anode to remote
earth and diminish the CP current beyond point “A” to I′cp by the amount of Is.
If the foreign structure also crosses the pipeline as shown in Figure 2-16, then the
foreign structure resistance to the pipeline will be lowered because of the close
proximity of the two pipelines at the crossing. This would result in a larger stray
current because the driving voltage between “A” and “B” will be greater (Figure
2-17).
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:20
metallic structure
Is
Is
A
Is,4
Is,5
Is,3
Is,2
Is,1
R4,e
R1,e
R3,e
R2,e
T/R
I2
I1
I3
R2,p
Is,1
I4
B
B
R3,p
R4,p
R1,p
drain point
Figure 2-16: Stray Current in a Foreign Metallic Structure that Intercepts
both the Anodic and Cathodic Voltage Gradient
Rc,a
Is
Icp
Icp
'
A
Ra,re
Rs,e
remote
earth
Rs
Rc,p
Rs,p
Icp
Rp,re
B
Icp
'
where: Icp = Icp
' + Is
Rc,a & Rc,p = cable resistances
Ra,re = anode resistance to remote earth
Rp,re = pipe resistance to remote earth
Rs,p = resistance of foreign pipe to cathodically
protected pipe at discharge area
Rs = longitudinal resistance of foreign structure
between pick-up and discharge sites
Rs,e = resistance of foreign pipe to earth
in a stray current pick-up area
Figure 2-17: Cathodic Protection Circuit Model with Foreign Structure Intercepting
both Anodic and Cathodic Voltage Gradient
A metallic foreign structure can also be subject to a stray current even if it only
intersects the cathodic voltage gradient as illustrated in Figures 2-18 and 2-19.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:21
Rn,e
A
R4,e
R1,e
R3,e
R2,e
Is
T/R
I2
I1
I3
R2,p
I4
B
B
R3,p
R4,p
R1,p
Is
drain point
A
Figure 2-18: Stray Current in a Foreign Metallic Structure that Intercepts
the Cathodic Protection Gradient
In this situation the interfered-with pipeline picks up stray current at remote earth
“A” and transports it to the crossing, where it discharges back to the interfering
structure. This means that any pipeline protected by impressed current systems
can cause interference on crossing metallic structures that are otherwise remote
from the impressed current groundbeds. Furthermore, the stray current discharge
need not be to the interfering structure but rather to a third-party structure acting as
an intermediate current path.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:22
Ra,re
Rc,a
Icp
Rs
Rc,p
Icp
Rp,re
Rs,re
A
remote
earth
Is
Rs,p
B
Icp
'
where: Icp = Icp
' + Is
Rc,a & Rc,p = cable resistances
Ra,re = anode resistance to remote earth
Rp,re = pipe resistance to remote earth
Rs,re = foreign structure resistance to remote earth
Rs,p = foreign structure resistance to cathodically protected
structure at stray current discharge location
Rs = longitudinal resistance of foreign pipe between
remote earth and discharge location
Figure 2-19: Cathodic Protection Circuit Model for Foreign Structure Intercepting
the Cathodic Voltage Gradient
As has been demonstrated, a stray current can occur in a foreign metallic structure
if it is impacted by either the anodic or cathodic voltage gradient produced by a
pipeline impressed current system. The magnitude of the stray current is directly
proportional to the voltage between the current pick-up and discharge location and
inversely proportional to the resistance of the interference current path.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2.2
2:23
Detecting Stray Current
There will be potential and current changes on and near a metallic structure due to
any stray current. These electrical disturbances are as follows:
• structure-to-soil potential changes at both stray current pick-up
and discharge locations
• current changes in the structure between the current pick-up and
discharge locations
• current changes in the earth near the structure at the current pickup and discharge locations.
If the output of the transformer-rectifier shown in Figure 2-16 is cyclically
interrupted and a close-interval potential survey is conducted over the foreign
structure from left to right, the potential profile as illustrated in Figure 2-20 would
be typical.
+ E
E off
E S/S
- E
E on
B
A
Distance
Figure 2-20: Typical Potential Profile on an Interfered-with Structure that Intersects both Anodic
and Cathodic Voltage Gradient with the Current Source Interrupted
Point “A” is the location on the structure immediately opposite the groundbed
location, and point “B” is at the pipeline crossing. When the current source is on,
there is a negative shift at the pick-up region (point “A”) and a positive shift at the
discharge location (point ‘B’).
Detection of current magnitude changes—involved in the stray current situation in
Figures 2-5, 2-16, and 2-18—are illustrated in Figure 2-21.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:24
Vs t
A
Is
Ve
B
Rs,1
Is
Ve =
where:
Vs t =
Is R e
Is Rs,1
Is
Ve
Figure 2-21: Current Changes In and Near an Interfered-with Structure
Current changes are detected by measuring the voltage drop in the earth adjacent
to the interfered-with structure and the voltage drop (ΔVst) over a length of the
structure with the stray current source cyclically interrupted. Therefore, there is a
change in the earth voltage drop (ΔVe) at both “A” and “B” due to the stray current
Is. At “A,” ΔVe will be positive because the stray current is toward the structure.
At “B” it will be negative, indicating a current way from the structure. The change
in structure voltage drop will be in the positive direction for the meter polarity
shown.
2.2.1 Mitigation of Interference Effects from Impressed Current
Cathodic Protection Systems
There are a number of methods that can be used to lessen the deleterious effects of CP
system stray currents, as listed below:
• remove the source or reduce its output
• install electrical isolating fittings in the interfered-with structure
• bury a metallic shield parallel to the interfered-with structure at the
stray current pick-up zone
• install additional CP at current discharge locations on the interferedwith structure
• install a bond between the interfered-with and interfering structures
• apply a coating to the interfered-with structure in the area of stray
current pick-up or to the interfering structure where it picks up the
returning stray current.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:25
Before any mitigation activity can commence, it is necessary to conduct mutual
interference tests where the output of the suspected interference source is cyclically
interrupted and field measurements taken in the presence of representatives of the
interfering and interfered-with companies. Interference cases are often reported
through local electrolysis committees, especially where there may be more than one
interfered-with party.
Presuming that a need for mitigation is determined, the mutually acceptable
mitigation technique(s) will depend on the location and severity of the
interference, on the CP operational preferences of each party, and on the relative
capital and maintenance costs of the mitigation options.
2.2.1(a)
Source Removal or Output Reduction
It is a difficult proposition to have a source removed if the interfering system was
present before the interfered-with structure was installed. However, in the opposite
situation, where the interfering source is newly installed, this method has greater
appeal.
If the interference is caused primarily by the proximity of the interfered-with structure
to the interfering groundbed, it may not be necessary to remove the transformerrectifier but simply relocate the groundbed location or reduce the current output.
Equation 2-5 or similar equations1 can be used to estimate how remote a particular
groundbed needs to be from a foreign structure in order to minimize the interference
effects.
It should be noted, however, that the voltage rise at any point distance “x” from the
groundbed is a percentage of the total voltage drop to remote earth (Vx,re/Vgb,re × 100).
The voltage rise is a function only of the geometry of the groundbed (i.e., its length
“L”) because the groundbed current output and soil resistivity would not change.
Therefore, only the length parameter in the equation significantly affects the
percentage.
1
Von Baekmann, Schwenk, and Prinz, Cathodic Corrosion Protection, 3rd Edition Gulf Publishing, 1997,
pp.538-539.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:26
Reducing the current output of the source is also a viable option as long as there are
safeguards to prevent the output from being raised inadvertently.
2.2.1(b)
Installation of Isolating Fittings
Installing isolating fittings as a stray current mitigation measure is an attempt to
increase the path resistance (Rs) of the interfered-with structure, thus decreasing the
stray current (Is). This is seldom adequate as a stand-alone method.
The stray current will certainly be reduced, but the lesser amount of stray current will
bypass each isolating fitting in the soil path. Hence, several points of interference will
be created (as previously shown in Figure 1-15a). Consequently, additional CP may be
needed at each isolating joint to compensate for the residual stray current.
The installation of isolating fittings to electrically sectionalize piping systems, as
illustrated in Figure 2-22, is a common practice.
isolating
fitting
I'''
s
I's
I''s
isolating
fitting
T/R
Figure 2-22: Stray Current Arising from Installation of Isolating Fittings
Unfortunately, inserting electrical isolation often produces a stray current
condition at the isolating fitting. Therefore on piping networks protected with
impressed current systems, electrical isolation should be used sparingly. When
electrical isolation is used, facilities to mitigate the expected interference should
be provided at each point of electrical isolation.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2.2.1(c)
2:27
Burying a Metallic Shield Next to the Interfered-with
Structure
The intent of a buried metallic conductor is to intercept the stray current and thus
provide an alternative low-resistance path for the stray current compared to the
metallic structure path. Connecting the metallic shield, which could be a bare cable or
pipe, directly to the negative terminal of the offending transformer-rectifier—as
shown in Figure 2-23 and modeled in Figure 2-24—would be more effective than
connecting it to the interfered-with structure.
Interfered-with Structure
Bare Shield
Is
Icp
T/R
Cathodically Protected Structure
Figure 2-23: Using a Buried Metallic Cable or Pipe as a Shield to Reduce Stray Current Interference
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:28
A
Ra,re
Rc,a
Icp
Rsh,e
Icp
'
Rs,e
I's
B
Rsh
Rc,p
I''s
Rs
Rs,re
remote
earth
Icp
Rp,re
where:
Icp
=
Icp
'
+ I's +
I''s
Rc,a & Rc,p = cable resistances
Rsh,e = shield resistance to earth
Rsh = shield cable longitudinal resistance
I's
I''s
= stray current in shield wire path
= residual stray current in foreign pipeline
Figure 2-24: Cathodic Protection Current Model for a Buried Metallic Shield Connected
to the Negative Terminal of the Transformer-Rectifier
The alternative approach which would be to connect the buried metallic shield to the
interfered-with structure, increasing the stray current discharge at point “B.”
This buried metallic shield method has most merit either where the interfered-with
structure is made of an amphoteric material or there is a concern about coating
blistering or cathodic disbondment.
For the interfering system, there is considerable disadvantage to this technique
because it could seriously disrupt the current distribution pattern to the
cathodically protected structure, perhaps even necessitating the installation of
additional CP units to make up for the poorer current distribution.
2.2.1(d)
Installation of Galvanic Anodes on the Interfered-with
Structure at Point of Stray Current Discharge
When the area of stray current discharge is very localized—such as at a crossing with
the interfering structure—and where the total stray current (Is) is typically less than an
ampere, the installation of galvanic anodes (Figure 2-25) has considerable benefit.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:29
Test Station
Interfering
Structure
Is,t
I's
I's'
I's
Icp
I's
Icp
I's
Icp
I's
I's
I's
Icp
Icp
Icp
Interfered-with Structu re
Figure 2-25: Interference Mitigation using Galvanic Anodes at Stray Current Discharge Location
If the interfered-with structure is coated at the crossing, then the path resistance (Rap)
through the galvanic anodes will be substantially lower than the interfered-with
structure resistance (Rs1,p). The electrical circuit model in Figure 2-26 depicts the
structure resistance. Although there can still be a residual stray current (Is′′), it is
expected that the total CP current (∑Icp) will be greater—thus assuring total
remediation of the interference.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:30
Icp
Is
Ra,re
Rc,a
I'cp
A
Rs,e
I's + Icp,g
Ra,p
Rc,p
Rp,re
Icp
=
Icp
'
I''s
Rs,p
Icp,g
Icp
where:
Eg
remote
earth
B
I'cp
+ I's + I''s
Rc,a & Rc,p = cable resistances
Ra,p = anode(s) resistance to the interfering pipe
Eg = galvanic anode driving voltage
Icp,g =
I's =
I''s =
galvanic anode current
stray current through galvanic anodes
residual stray current discharging from foreign pipeline
Figure 2-26: Electrical Circuit Model for Mitigating Stray Current Interference at a
Stray Current Discharge Site Using Galvanic Anodes
Ideally, the galvanic anodes are distributed alongside the interfering structure in order
to minimize the path resistance (Ra,p); therefore, the stray current (I′s) is a large
percentage of the total stray current (Is). The design life of the galvanic anodes must
take into account the additional consumption by the stray current (I′s) component of
its total output.
Several advantages of this method are as follows:
• the interfered-with structure can maintain CP independence
• the galvanic anode CP current output boosts the level of protection at the
crossing as an added buffer should the interference current (Is) increase
• low maintenance requirements compared to a direct bond.
The disadvantages are that it is relatively expensive compared to a direct bond and the
interference current mitigation capacity is somewhat limited. To mitigate large
interference currents, an impressed current system can be utilized having the drain
point at the crossing but the groundbed remote from both piping systems.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:31
Example: Design Calculations for a Galvanic Anode Interference Mitigation System
At a crossing of two coated and cathodically protected pipelines, a temporary
resistance bond of 3 Ω passing 350 mA was required to mitigate the interference
on Pipeline A caused by Pipeline B’s impressed current systems. It has been
decided to mitigate that interference problem using magnesium anodes because the
soil resistivity is low (3100 Ω-cm) and Pipeline A wishes to maintain its cathodic
protection independence.
Step 1:
Choose a #17D2 magnesium anode from Table 1 in Appendix C.
Step 2:
Calculate the resistance of a single vertical anode from Dwight’s Equation:
Ra =
where:
Ra
ρ
L
d
Ra =
then:
Step 3:
=
=
=
=
ρ ⎧⎛ 8 L ⎞ ⎫
⎨⎜ ln ⎟ − 1⎬
2πL ⎩⎝ d ⎠ ⎭
[2-18]
resistance of vertical anode to remote earth
soil resistivity (Ω-m) = 31 Ω-m
length of packaged anode (m) = 1.5 m
diameter of packaged anode (m) = 0.15m
⎧⎛ 12 ⎞ ⎫
31
⎟ − 1⎬ = 3.3{3.38} = 11.2 Ω
⎨⎜ ln
6.28 × 1.5 ⎩⎝ 0.15 ⎠ ⎭
Calculate minimum number of anodes (N) to achieve a 3-Ω resistance.
Assuming no mutual resistance effects between anodes then
N=
Step 4:
Calculate anode CP current output assuming a pipeline polarized potential
of –850 Vcse
Ia =
Step 5:
Ra
11.2
=
= 3.72 or 4 anodes
3.0
RT
DrivingVol tage
1.700 V − 0.850 V
=
= 75.9 mA
Ra
11.2 Ω
Calculate total current output (It) per anode.
It = Ia + Iint
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:32
= 75.9 mA +
Step 6:
It = 163.4 mA
Calculate anode life:
L =
where:
Note:
L
Wt
U
E
Ia
Cr
=
=
=
=
=
=
Wt × U × E
I a × Cr
[2-19]
effective service life (y)
total weight of anode alloy (kg)
utilization factor
efficiency
current output (A)
theoretical consumption rate (kg/A-y)
Consumption rate for magnesium @ 50% efficiency is
approximately 8 kg/A-y. An utilization factor of 0.85 is assumed.
L =
Step 7:
350
mA
4
7.7 kg × 0.85
= 5y
0.163 A × 8kg / A − y
Calculate minimum anode weight to achieve a 20-year life using equation
[2-19].
Wt =
Wt =
L × I a × Cr
U×E
20 yr × 0.163 A × 8kg / A − yr
= 30.7 kg
0.85
therefore: Total anode weight for the mitigation system would need to be
4 × 30.7 kg = 122.7 kg
Step 8:
Chose a larger weight anode from Table 1 in Appendix C.
GROUP EXERCISE
Determine an appropriate anode size and number to
achieve a 20-y life.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2.2.1(e)
2:33
Installation of an Impressed Current Distribution System
on the Interfered-with Structure at Point of Stray Current
Discharge
The stray current situation, depicted in Figure 2-5, results in a typical potential
profile along the interfered-with structure. In this case, the stray current discharge
(+ΔE) occurs in an end-wise fashion (Figure 2-27).
+ E
E S/S
+ E
- E
A
B
Distance
Figure 2-27: Potential Profile Changes on a Pipeline Where Stray Current
is Discharging in an End-Wise Pattern
Although the positive potential shift may be modest, the length of the discharge
can be extensive. Under these conditions, the installation of an impressed current
system at the discharge locations (“A” and “B”) can be an effective means of
compensating for the stray current interference. Care must be taken to ensure that
the impressed current systems do not create interference on the original interfering
structure.
2.2.1(f)(i)
Installing a Bond Between the Interfered-with and
Interfering Structures
Perhaps the most common stray current mitigation method is the installation of a
bond. The bond usually has some resistance between the two structures and usually is
located at the point of maximum stray current discharge, such as at a crossing as
shown in Figure 2-28.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:34
I's
P1
Bond
Cable
Variable
Resistor
P2
Bond
Cable
Test Station
(Rb)
interfer ed-with
structure
P1
I's
I's
Is
bond cable and
test station
I's'
P2
interfering
structure
buried reference
electrode
Figure 2-28: Interference Mitigation Using a Resistance Bond
The electrical circuit model is similar to Figure 2-26, except for the fact that the bond
resistance (Rb) replaces the galvanic anode resistance (Ra,p) in the circuit. Typically,
the bond resistance is determined by monitoring the potential of the interfered-with
structure while adjusting the resistance until the interfered-with structure is returned to
its CP criterion or native potential on a structure having no CP. A zinc reference
installed between the two structures at the crossing is an optional, but nevertheless
worthwhile, feature.
A resistance bond will not eliminate all the current discharge at the crossing because
there will still be a residual stray current discharge (Is′′), which must be countered by
the interfered-with structure’s CP system.
The major advantages of a resistance bond over other mitigation methods include:
• relatively inexpensive to install
• easy to adjust if stray current magnitude changes
• has a high current capacity.
Disadvantages of using a resistance bond are as follows:
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:35
• resistance bonds are vulnerable to AC fault current transients that can burn out
the resistor, unless protected with fault current devices.
• connecting two structures through a resistance bond means that CP changes on
either structure will affect protection levels on the other structure
• surveys to measure true polarized potentials on either structure may require the
synchronous interruption of the bond with impressed current systems on both
structures
• resistance bonds are considered critical components and, by regulation, require
frequent inspection.
• inadvertent removal or adjustment by unqualified people.
2.2.1(f)(ii) Calculation of Bond Resistance
The value of the resistor needed for the interference bond can be determined in the
field using trial-and error methods, or it can be calculated using the procedures
originally proposed by Pearson2 and later described by Seifert3, McGary4, and others.
Consider the pipeline system shown in Figure 1-1. Line 1, which is cathodically
protected by an impressed current system, causes a stray current interference problem
where it crosses Line 2.
2
J.M. Pearson, “Measurements of Cathodic Polarization and of Problems of Interference on Underground
Structures”
3
R.L. Seifert, “The Use of A Programmable Electronic Calculator in Underground Corrosion Related
Activity.” NACE Corrosion/79, Paper 190.
4
W.McGary, “Interference Effects on Underground Structures and the Criteria for Correction by Electrical
Bonds.” NACE Northeast Regional Conference, Philadelphia PA, 1964.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:36
Rectifier
IB
V12
+
RB
Line 2
IR
V1
+
+
V2
-
Line 1
Figure 2-29: Measurements Required to Determine Size of Resistance Bond RB
In order to mitigate this interference, a resistance bond must be installed in the joint
test station at the crossing, which will restore Line 2 to its natural potential (i.e., the
pipe-to-soil potential measured with the rectifier off). The first step in sizing this bond
is to record the following measurements:
IR = Rectifier current
V1 (on, oc) = Pipe-to-soil potential of Line 1 at crossing, with rectifier on, and bond open-circuited
V1 (off, oc) = Pipe-to-soil potential of Line 1 at crossing, with rectifier off, and bond open-circuited
V2 (on, oc) = Pipe-to-soil potential of Line 2 at crossing, with rectifier on, and bond open-circuited
V2 (off, oc) = Pipe-to-soil potential of Line 2 at crossing, with rectifier off, and bond open-circuited
A temporary bond having an arbitrary resistance is then installed, and the following
additional measurements are taken:
IB = Bond current
V1 (on, cc) = Pipe-to-soil potential of Line 1 at crossing, with rectifier on, and bond close-circuited
V1 (on, oc) = Pipe-to-soil potential of Line 1 at crossing, with rectifier on, and bond open-circuited
V2 (on, cc) = Pipe-to-soil potential of Line 2 at crossing, with rectifier on, and bond close-circuited
V2 (on, oc) = Pipe-to-soil potential of Line 2 at crossing, with rectifier on, and bond open-circuited
The following parameters are then calculated:
RR1 = Rectifier Protective Coupling with Line 1
(i.e., the potential change on Line 1 per ampere of rectifier current)
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:37
V1 (off , oc ) − V1 (on, oc )
IR
RR1 =
[2-20]
RR2 = Rectifier Interference Coupling with Line 2
(i.e., the potential change on Line 2 per ampere of rectifier current)
RR 2 =
V2 (on, oc ) − V2 (off , oc )
IR
[2-21]
RR1,2 = Rectifier Mutual Coupling between Lines 1 and 2
(i.e., the potential change between Lines 1 and 2 per ampere of rectifier current)
RR1, 2 = RR1 + RR 2
[2-22]
RB1 = Bond Interference Coupling with Line 1
(i.e., the potential change on Line 1 per ampere of bond current)
RB1 =
V1 (on, cc ) − V1 (on, oc )
IB
[2-23]
RB2 = Bond Protective Coupling with Line 2
(i.e., the potential change on Line 2 per ampere of bond current)
RB 2 =
V2 (on, oc ) − V2 (on, cc )
IB
[2-24]
RB1,2 = Bond Mutual Coupling between Lines 1 and 2
(i.e., the potential change between Lines 1 and 2 per ampere of bond current)
RB1, 2 = RB1 + RB 2
[2-25]
V1,2 (off, oc) = Voltage between Lines 1 and 2 with rectifier off and bond open
V1, 2 (off , oc ) = V2 (off , oc ) − V1 (off , oc )
[2-26]
The required bond size, and the resulting bond currents with the rectifier on and off,
can then be calculated as:
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:38
RB =
V1, 2 (off , oc ) + I R RR1, 2
− RB1, 2
RR 2
IR
RB 2
I B (on ) =
I B (off ) =
I R RR 2
RB 2
V1, 2 (off , oc )
RB + RB1, 2
[2-27]
[2-28]
[2-29]
The final pipe-to-soil potentials with the bond installed can be calculated for both
lines as follows:
V1 (on, cc) = V1 (on, oc) + I B (on) RB1
[2-30]
V1 (off , cc) = V1 (off , oc) + I B (off ) RB1
[2-31]
V2 (on, cc) = V2 (on, oc) − I B (on) RB 2
[2-32]
V2 (off , cc) = V2 (off , oc) − I B (off ) RB 2
[2-33]
Sample Calculation:
In the pipeline system of Figure 2-29, conduct field testing and perform the necessary
calculations to determine the required bond size to mitigate interference on Line 2.
Solution:
The following field measurements are made:
Rectifier Current:
IR = 10 A
Pipe-to Soil Potentials:
Protected Line (Line 1):
Rectifier on: V1 (on, oc) = –1.45 V
Rectifier off: V1 (off, oc) = –0.95 V
Foreign Line (Line 2):
Rectifier on: V2 (on, oc) = –0.75 V
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:39
Rectifier off: V2 (off, oc) = –0.90 V
A piece of resistor wire (of unknown resistance) is used to create a temporary bond
between lines 1 and 2. The following additional measurements are then made while
the rectifier remains on:
Temporary Bond Current:
IB = 0.75 A
Pipe-to Soil Potentials (while interrupting bond current):
Protected Line (Line 1):
Bond closed: V1 (on, cc) = –1.30 V
Bond open: V1 (on, oc) = –1.45 V
Foreign Line (Line 2):
Bond closed: V2 (on, cc) = –0.825 V
Bond open: V2 (on, oc) = –0.75 V
R R1 =
RR 2 =
V1 (off , oc ) − V1 (on, oc ) − 0.95 − (− 1.45) V
=
= 0.05Ω
10
IR
A
V2 (on, oc ) − V2 (off , oc ) − 0.75 − (− 0.90 ) V
=
= 0.015Ω
IR
A
10
RR1, 2 = RR1 + RR 2 = 0.05 + 0.015 = 0.065Ω
RB1 =
RB 2 =
V1 (on, cc ) − V1 (on, oc ) − 1.30 − (− 1.45) V
=
= 0 .2 Ω
0.75
IB
A
V2 (on, oc ) − V2 (on, cc ) − 0.75 − (− 0.825) V
=
= 0.1Ω
IB
A
0.75
RB1, 2 = RB1 + RB 2 = 0.2 + 0.1 = 0.3Ω
V1, 2 (off , oc ) = V2 (off , oc ) − V1 (off , oc ) = (− 0.90 ) − (− 0.95) = 0.05V
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:40
The bond current required for mitigation is:
I B (on ) =
I R RR 2 (10 )(0.015 )
=
= 1 .5 A
RB 2
0 .1
The required bond resistance is:
RB =
V1, 2 (off , oc ) + I R RR1, 2
0.05 + (10 )(0.065)
− RB1, 2 =
− 0.3 = 0.167Ω
RR 2
0.015
IR
10
RB 2
0.1
The current through the bond when the rectifier is off is:
I B (off ) =
V1, 2 (off , oc )
RB + RB1, 2
=
0.05
= 0.11A
0.167 + 0.3
The final potentials on the pipelines with the rectifier interrupted are:
V1 (on, cc) = V1 (on, oc) + I B (on) RB1 = −1.45 + (1.5)(0.2) = −1.15V
V1 (off , cc) = V1 (off , oc) + I B (off ) RB1 = −0.95 + (0.11)(0.2) = −0.93V
V2 (on, cc) = V2 (on, oc) − I B (on) RB 2 = −0.75 − (1.5)(0.1) = −0.90V
V2 (off , cc) = V2 (off , oc) − I B (off ) RB 2 = −0.9 − (0.11)(0.1) = −0.91V
2.2.1(g)
Use of Coatings in the Mitigation of Interference Effects
Application of a coating is an attempt to increase the resistance of the stray current
path thus decreasing the stray current magnitude. As a stand-alone method, coating
should only be applied at current pick-up locations. If the discharge area of a
structure is coated, there is a risk of corrosion failure owing to a high discharge
current density at a holiday in the coating.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:41
There are two current pick-up regions, one on the interfered-with structure and one on
the interfering structure in the vicinity of the stray current discharge as shown in
Figure 2-30.
Is
Is
coated pipe sections
T/R
I1
Figure 2-30: Use of a Dielectric Coating to Mitigate Interference
This technique is easy to implement on a new structure, where a high resistance
coating can be used in areas where stray current pick-up is anticipated. It may be
generally impractical for existing facilities.
2.2.2
Other Sources of DC Stray Current
Besides impressed current CP systems, there are other sources of DC stray current:
•
•
•
•
DC transit systems
DC welding equipment
high-voltage DC transmission systems (HVDC)
DC rail systems in mines.
Because these sources have a variable loading nature, the resulting stray current
activity is dynamic (i.e., effects vary in magnitude and often location with time).
Another source of dynamic stray current, telluric currents, is discussed in Chapter 4.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2.2.2(a)
2:42
DC Transit Systems
The electrification of transit systems in the late 1800s throughout North America
resulted in considerable interference corrosion on gray cast iron watermains. Much of
the early attempts to mitigate this interference eventually led to the development of
CP technology.5
DC
substation
O/H power conductor
IL
IR
Is
running
rails
ground
Is
Is
pick-up
metallic structure
(e.g.,watermain)
Ie
Ie
discharge
Figure 2-31: Typical Stray Current Paths Around a DC Transit System
The load current (IL), after passing through the trolley motor, divides into a number of
current paths depending on the resistance of each path.
therefore:
IL = IR + Is + Ie
[2-34]
Although the rails provide a relatively low-resistance path, the current leakage off the
rails can be 5 to 10% of the load current. This may seem a small percentage, but the
stray currents can be substantial because the start-up load current can be several
hundred amperes for a single trolley and several thousand amperes for a subway train.
5
Kuhn, R.J., Cathodic Protection of Underground Pipelines from Soil Corrosion, API Proceedings, Nov.
1933, Vol. 14, p.164.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:43
Not only will the magnitude of the stray current vary with time of day and whether
the vehicle is accelerating or decelerating, but the location of stray current pick-up on
the metallic structure will change as the trolley moves along the rail. Thus, a
structure-to-soil potential recording will have a dynamic appearance (Figure 2-32).
0
-1000
-1500
-2000
-2500
-3000
Time
Figure 2-32: Typical Structure-to-Soil Potential Recording with Time Caused by
Interference from a DC Transit System
The potential-time recording of stray current effects from a DC transit system has
a distinctive pattern. There are considerable potential fluctuations during the
morning and evening rush-hour periods, light activity in the middle of the day and
late evening, and virtually no changes during the early morning hours.
Although the stray current pick-up locations change with time, the discharge sites
are predominantly in proximity to the substation ground. In urban areas, localized
stray current can discharge from water piping around electrically discontinuous
joints and from crossings with other utilities remote from the substation ground.
Determining the impact of transit-caused stray current on metallic facilities in
urban areas requires considerable potential and current recording, starting in the
vicinity of the substation grounds and along the transit system route.
CP Interference
© NACE International, 2006
January 2008
10:00
9:00
8:00
7:00
6:00
5:00
4:00
3:00
2:00
1:00
0:00
23:00
22:00
21:00
20:00
19:00
18:00
17:00
16:00
15:00
14:00
13:00
12:00
11:00
-3500
10:00
Potential wrt CSE (mV)
-500
DC Interference
2.2.2(a)(i)
2:44
Analysis of Transit System Stray Currents
A comprehensive method of analyzing dynamic stray current activity involves the
construction of beta curves from current and potential measurements.
A line current survey can be conducted to determine the magnitude and direction
of the currents flowing along the pipeline, providing a way to locate the source of
the interference. However, this requires that some means be available to measure
pipeline currents at a number of locations throughout the area of interest (which is
not always possible). In cases where the pipe is exposed or rises above grade, this
can be done using a pipeline current clamp (Figure 2-33). Otherwise, as Figure
2- 4 shows, IR-drop test stations must be used.
Figure 2-33: Current Clamp Used to Measure Pipeline Currents
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:45
Substation
+
Positive
Rail
Load
Negative
Return Rail
IA
ID
IB
IC
IE
+ V -
+ V -
+ V -
+ V -
+ V -
A
B
C
D
E
Figure 2-34: Line Current Survey to Locate Source of Interference Using IR-Drop Test Stations
A line current survey is conducted by taking a series of simultaneous pipeline
current measurements at adjacent locations on the pipeline, and plotting these
measurements with respect to one another. The measurements may be conducted
simultaneously using either global positioning system (GPS) synchronized data
loggers or manually using a two-person crew who communicate by radio. The best
way to illustrate the procedure is through the following example.
In Figure 2-34, a set of pipeline current measurements are made at the IR-drop test
station at location “A”; a second set of current measurements is simultaneously
recorded at Location “B.” The measurements obtained at “B” are plotted against
those obtained at “A” in Figure 2-35, and it is found that the relationship is linear
and the data produce a line having a slope of greater than unity. Because the
relationship is linear, the currents measured at “A” and “B” must emanate from the
same source of interference. Also, because the slope is greater than 1, more line
current exists at location “B” than at location “A”; the pipeline must therefore be
picking up interference current in this area.
Simultaneous measurements are also taken at locations “B” and “C,” producing
the second chart in Figure 2-35. Here, the plot is once again linear. However, the
slope of the line is unity. This indicates that there is no net pick-up or discharge of
interference current between these two locations.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:46
In the third chart of Figure 2-35, the slope of the line is less than unity; this
indicates that interference current is discharging from the pipeline and that
mitigative measures must be taken in this area. Note that in all three of these
charts, the plots do not pass through the origin. This is an indicator that there are
other currents also flowing along the pipeline that are unrelated to the interference
currents, such as CP current.
In the fourth chart of Figure 2-35, there is no correlation between the currents
measured at location “D” and those measured at location “E.” This indicates that
the line currents at location “E” must emanate from some other source of
interference. This other source could simply be another load somewhere else along
the transit system, or it could be a source that is totally unrelated to the transit
system.
IC
IB
ΔIB
ID
IE
ΔIC
ΔIB
ΔIA
ΔIC
ΔID
IA
IB
IC
ΔIB
>1
ΔIA
ΔIC
=1
ΔIB
ΔID
<1
ΔIC
ID
Non-Linear
Figure 2-35: Line Current Plots for Example in Figure 2-34
A second type of survey that can be conducted is the exposure survey, where pipeto-soil potential measurements are recorded simultaneously with pipeline currents
(Figure 2-36). At each location, current is plotted versus potential to determine the
point of maximum discharge.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:47
Substation
Positive
Rail
+
Load
Negative
Return Rail
IA
-
V
+
A
IB
V -
-
V
+
V -
B
ID
IC
-
V
+
C
V -
-
V
+
D
V -
IE
-
V
+
V -
E
Figure 2-36: Exposure Survey to Locate Point of Maximum Exposure
As an example, the first two charts in Figure 2-37 show that as the current flowing
along the pipe increases, the potential of the earth becomes more positive with
respect to the pipeline (i.e., pipe potential becomes more negative). This indicates
areas of current pick-up. Because the slope of the plot is greater at “A” than at “B”
(i.e., potential variations are greater per unit of interference current), location “A”
is considered to be the point of maximum current pick-up.
At location “C,” the pipe potential is unaffected by the interference current;
consequently, there is neither pickup nor discharge in this area. This location
should also correspond to the point of maximum current flow along the pipeline.
At location “D,” the earth potential becomes more electronegative (i.e., the pipe
potential becomes more electropositive) as the current flowing along the pipeline
increases; this indicates a point of current discharge. Although it has a positive
slope, Location “E” is also a point of current discharge because the direction of
current flow along the pipeline is in the opposite direction to that at locations “A”
through “D.” Because the absolute value of the slope of the plot at “D” is greater
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:48
than that at “E,” Location “D” is the point of maximum exposure—where
mitigative measures must be taken.
Vp/s
Vp/s
ΔI
ΔVp/s
ΔI
α
Location A
I
I
Location B
Vp/s
ΔVp/s
Δ Vp/s
=0
ΔI
ΔVp/s
α
Vp/s
Vp/s
ΔI
I
α
α
Location D
Location C
I
α
Location E
Figure 2-37: Exposure Survey Plots for Example in Figure 2-36
A third type of survey that can be conducted is the mutual survey, which does not
involve the measurement of pipeline currents. Voltages are measured between the
pipeline and the interfering system; simultaneously, pipe-to-soil potentials are
measured at the point of maximum exposure (Figure 2-38). The pipe-to-soil
potentials Ep/s are plotted versus the pipe-to-rail potentials Ep/r. If a correlation
exists, as shown in Figure 2-39, then the source of interference has been positively
identified.
Substation
Positive
Rail
+
Load
Negative
Return Rail
V
+
-
V
+
Figure 2-38: Mutual Survey to Confirm Source of Interference
CP Interference
© NACE International, 2006
January 2008
ΔI
I
ΔVp/s
DC Interference
2:49
Vp/s
ΔVp/s
ΔVp/r
α
Vp/r
Figure 2-39: Pipe-to-Soil Potential Versus Pipe-to-Rail Potential for Example in Figure 2-38
Plots that relate pipe-to-soil potential to pipe-to-rail potential generally are called
beta curves because the slope of the linear plot is called beta. The equation of the
line is as follows:
Vp/ s = α +
ΔV p / s
ΔV p / r
V p / r = α + βV p / r
[2-35]
Because the pipe-to-soil potential in this example is a linear function of the pipeto-rail potential (Figure 2-39), and because the pipe-to-soil potential is also a linear
function of the pipeline current (Figure 2-37), it follows that pipeline current is a
linear function of the pipe-to-rail potential. Therefore, it has been argued that an
exposure survey may be conducted without measuring pipeline currents at all. This
line of reasoning calls for simply recording pipe-to-soil potentials at various
locations along the pipeline (Figure 2-40) and plotting these versus pipe-to-rail
potential (Figure 2-41).
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:50
Substation
Positive
Rail
+
Load
Negative
Return Rail
V
+
-
V +
-
A
V +
-
B
V +
C
Figure 2-40: Exposure Survey Conducted Without the Measurement of Pipeline Currents
Vp/s
Vp/s
Vp/s
Δ Vp/s
=0
Δ Vp/r
ΔVp/s
ΔVp/r
Vp/r
α
α
Vp/r
ΔVp/r
α
ΔVp/s
Location B
Location A
Location C
Figure 2-41: Exposure Survey Plots for Example in Figure 2-40
In general, the steeper the slope of the beta curve, the greater the pick-up or
discharge. However, the polarity of the slope will depend upon the point of
connection for the voltmeter measuring the pipe-to-rail potential.
CP Interference
© NACE International, 2006
January 2008
Vp/r
DC Interference
2.2.2(a)(ii)
2:51
Mitigation of Transit System Stray Currents
Mitigation methods for minimizing the deleterious effects of DC transit system
stray currents are similar to those used for ameliorating CP stray currents. They
include:
•
•
•
•
•
electrical isolation of rails and substation
electrical bonds
reverse current switches
forced drainage bonds
CP.
On existing transit systems, stray current has been reduced significantly by
improving the isolation between the rail and ballast. This is accomplished by
installing insulating pads between the rail and ties, between the hold-down plates
and the rail, and ensuring that the ballast is well drained. These measures, coupled
with disconnecting the negative rails from electrical grounds, have proved
relatively successful in many instances. Disconnecting the DC substation from
electrical ground allows the rails and transit vehicles to electrically float in a
manner that requires the installation of switching devices that connect the rails to
earth if a specific rail voltage-to-ground potential is exceeded. The effectiveness
of substation isolation in minimizing stray current activity is therefore lost during
the time that the safety switches are activated.
For new transit systems, it has become common to electrically isolate the entire
rail pocket if the rail is embedded in the road surface (Figure 2-42a) or isolate the
rail from ties (Figure 2-42b).
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:52
Polyurethane
Sealant
Flangeway
Rail
Elastomer Pad
36 Mils of
Coal Tar Epoxy
Rail Clip
Concrete
Tie
Third Pour
Fiber Concrete
Concrete
Invert
Second Pour
Fiber Concrete
115 RE Rail
Preformed
Rail Trough
30 Mil PVCl
Sheet on Bottom
of Trough
3-20 Mil
Polyethylene
Sheets
Figure 2-42b: Typical Direct-Fixation
Isolating Fastener
First Pour
Concrete Slab
Structurally
Reinforced
Source: Fitzgerald J.H. and Lauber, M.D.,
Stray Current Control for the St. Louis Metrolink Rail
System, MP, Vol. 34(1), Jan. 1995, p.22
Figure 2-42a: Typical Embedded Track Installation
Source: Sidoriak, W., Rail Isolation on the Baltimore Central
Light Rail Line, MP, Vol. 32(7), July 1993, p.36
Some transit systems use a separate isolated rail (so-called fourth rail) as a current
return path, which negates the need to isolate the running rails.
The earliest attempts to mitigate the corrosive effects of transit stray currents simply
involved running bonds from the utilities to the negative bus at each substation. This
provided an electronic path for the stray current to return, thus reducing the amount of
stray current in the electrolytic path as shown in Figure 2-43.
positive bus
to 3rd rail
rails
DC
substation
negative bus
shunt
Is,2
Is,1
metallic structures
Figure 2-43: Typical Utilities Drainage System at a Transit Substation
Facilities such as lead-sheathed power cables, steel gas piping, telephone grounds,
and iron water piping would be connected in series with a switch and a shunt to the
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:53
negative bus. The shunt provides a means of recording the stray current magnitude
and direction.
One weakness of this drainage arrangement is that providing a direct low resistance
path for the stray current causes the underground structures to pick up more current
than they would otherwise. For structures with electrical discontinuities, such as iron
watermains, this can result in more severe corrosion at the isolating joints.
A second disadvantage of the direct bond drainage system becomes evident where
there are multiple substations and many trains. The utilities represent an alternative
path to the rails between substations, and the stray currents can actually reverse. This
situation is depicted in Figure 2-44.
bus
bus
SS
'A'
I''L,B
bus
3rd rail
IL,A
I'L,A + I''L,B
I''L,B
I''L,A + IS,A
IL,B
L
IL,A
'' + I'L,B
running rails
I''L,B + IS,B
utilities
bus
SS
'B'
I''L,A
I''L,A
Figure 2-44 Schematic Showing Circulating Current between Transit Substations
Through Direct Bonds to Utilities
With the transit load located between substations “A” and “B,” it will draw some of
the load current from each station. Hence, each substation’s load current has an
alternative path through the utility bonds back to its respective source.
To prevent circulating currents, reverse current switches can be installed in each
bond. These devices present a high resistance in one direction (the reverse
direction) and a low resistance in the other (direction of intended drainage). There
are several types of reverse current switches,[6] as listed in Table 2-2, each with
differing operational characteristics.
6
Munro, J. I., Comparison and Optimization of Reverse Current Switches, NACE, Corrosion/80, Paper
No. 142, March 1980.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:54
Table 2-2: Types of Reverse Current Switches
Type
Characteristics
Electromagnetic (relay)
Requires AC power to operate the relay, relay must conduct
all current, may be slow to open
Diodes (germanium,
silicon)
Requires a minimum of 0.4V to conduct, have resistance,
subject to surge failures and reverse voltage breakdown
Hybrid (relay in parallel
with diodes)
Smaller relay required because diodes carry most current and
are subject to reverse voltage breakdown.
Potential Controlled
Rectifier (Figure 2-40)
Can drain all the stray current but are relatively expensive.
Although CP is beneficial in mitigating transit system stray current, the stray currents
are often so large that they preclude mitigation with galvanic anodes. Moreover,
large-capacity impressed current systems in an urban area will likely create
interference on other facilities. CP thus has limited effectiveness.
One the most successful measures is the use of a forced drainage bond. As shown in
Figure 2-45, a forced drainage bond is a bond with a potential-controlled rectifier
connected in series with the bond.
Is
Potential
Controlled
Rectifier
Is
structure
buried reference
electrode
Figure 2-45: Forced Drainage Bond Using a Potential Controlled Rectifier
The voltage output of the auto-potential rectifier varies depending on the potential
measured between the structure and a buried reference electrode. If the measured
potential is more positive than the potential set on the controller, the rectifier output
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:55
voltage increases to force more current through the bond. With a DC voltage source
in series with the bond, the bond resistance is negative. The negative resistance
ensures that all the stray current is drained from the structure and there is no residual
stray current in the soil path. Nevertheless, the controller must be adjusted so that
there is no bond current during periods of no stray current activity. Otherwise, the
transit system rails and grounding system will be corroded.
To be completely effective, the forced drainage bond must be located at the point of
maximum discharge. Just as with a resistance bond, if the structure is not electrically
continuous then a forced drainage system will aggravate corrosion at any isolating
joints.
2.2.2(b)
High Voltage Direct Current (HVDC) Electrical Transmission
Systems
HVDC systems that transmit large blocks of electrical power over long distances
have operating cost advantages over high voltage alternating current (HVAC)
transmission. Unlike HVAC systems, there are no inductive or capacitive losses
on HVDC. Moreover, for lengths greater than approximately 800 km, the power
savings easily justify the extra capital costs to build the AC/DC converter stations
and their extensive electrical grounding systems.
HVDC systems are built to operate in bi-polar mode; that is, there is both a
positive and negative circuit with large grounding electrodes at each terminus as
illustrated in Figure 2-46.
Idc
positive
cables
load
end
AC / DC
negative
Converters
supply
end
cables
Idc
L > 800 km
Figure 2-46: Electrical Schematic for a HVDC System
Under normal operating conditions, the DC line currents are typically in the
1000A range and imbalance currents are approximately 1 to 2% of the line
currents. Such small currents do not pose a significant stray current risk on
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:56
underground metallic structures because the electrodes are intentionally located
remotely from other utilities.
During emergency operating conditions, where either the positive or negative
cable networks are faulted or de-energized for maintenance, the line current passes
through the earth via the grounding electrodes. Under these circumstances, the
system is operating in monopolar mode.
HVDC grounding electrodes are large compared to impressed current groundbeds,
although CP anode materials such as high-silicon iron and coke are often used.
The electrode is typically in the shape of a ring having approximately 100m
diameter and a depth of 1 to 2m. Despite the large size and relative remoteness,
the voltage gradient around the electrode can be appreciable even a long distance
away when the electrode is passing hundreds of amperes.
For example, the voltage rise in earth at some distance “x” from such an electrode
can be estimated using Equation 2-36.
Vg, x =
Ie ρs
2πx
[2-36]
where: Vg,x = voltage rise with respect to remote earth at a
distance “x” from the electrode
Ie = electrode current
ρs = soil resistivity
x = distance from the electrode
given:
then:
Ie = 500A
ρs = 50 Ω-m
r = 1000m
Vg, x @ 1 km =
500A × 50 Ω - m
6.28 × 1000 m
≈ 4V
Hence a metallic structure located 1 km from the electrode would be exposed to
4V during monopolar operation under the foregoing conditions. It is claimed that
the HVDC system will operate in monopolar mode a small percentage of time.
Nevertheless, the rather large voltage gradients can present a serious corrosion risk
on some structures on a cumulative basis.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:57
Also, the effect can be either a positive or negative potential shift on the structure
(Figure 2-47) depending on which of the power circuits has the outage.
+1.0
0.0
E s/s
(Vcse )
+ E
-1.0
- E
-2.0
-3.0
-4.0
t1
t3
t2
t4
Time
Figure 2-47: Potential-Time Plot for a Metallic Structure being Interfered-with by a HVDC System
Assume that the potential plot in this figure was from a structure located near the
supply end groundbed. Under this scenario, the negative shift from t1 Æ t2 would
result from a failure on the positive circuit and the positive shift from t3 Æ t4
would result from a failure on the negative circuit. Note that the potential shifts
are not necessarily equal—even if the stray current is the same—because the
cathodic and anodic polarization characteristic can be different.
Most structures would not extend the full 800km, nor be close enough to the
electrode to make it economical to install a bond. Because of the large voltage
shifts, galvanic anodes many not adequately compensate. The most practical
mitigation method is to use an impressed current system powered by a potential
controlled rectifier. Not only would the CP power supply be able to counteract the
large positive potential shifts, but during the negative shift periods it would shut
down—thus minimizing the stress on the coating if the structure was a coated steel
pipeline.
2.2.2(c)
DC Welding Operations
Welding operations on ships and barges have been known to create stray current
interference, sometimes so severe that it has resulted in the sinking of the vessel.
Interference arises where the negative of the welding generator is connected to
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:58
electrical ground on the dock and there is no electrical bond between the dock and
the vessel. Under these circumstances, the welding current (which can be
hundreds of amperes) discharges from the vessel to the dock as illustrated in
Figure 2-48.
DC welding
generator
Is
sheet
steel piling
Figure 2-48: Stray Current Caused by DC Welding Operations
The interference is mitigated by bonding the vessel to the dock or by attaching the
negative of the welding generator directly to the vessel.
Experiment 2-1:
To Demonstrate DC Interference and Its Mitigation
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:59
Experiment 2-1
To Demonstrate DC Interference and Its Mitigation
3
1 cm
steel
rod
1 cm
2
mag
anode
4
5
6
1
A
9V
10 ohm
Experiment Schematic No. 1
Procedure
Step:
A. Place bare steel rod along one end of the tub in 5cm of water obtained from
the cold water tap. Connect the 9V battery, 10 Ω resistor, ammeter, and
switch in series between the steel rod and magnesium anode. Close the
switch and allow the CP system to operate for a minimum of 5 minutes.
B. Measure and record the potential on the steel rod with the reference
positioned at locations 1, 2, and 3. Record the current.
C. Open the switch and insert the second steel rod (foreign structure)
perpendicular to the first steel rod at Location 2.
D. Measure and record the foreign structure potential at reference locations 4, 5,
and 6 with the switch remaining open.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:60
Experiment 2-1, cont’d
E. Close the switch and allow the CP system to operate for a minimum of 5
minutes.
F. Measure and record structure potentials at all reference locations on both
structures and record the CP current.
G. Calculate the shift in potential at locations 4, 5, and 6 on the foreign structure
and the change in CP current.
Discussion Break
H. Mitigate interference using a resistance bond connected between the
cathodically protected structure and the foreign structure as in Schematic No.
2. Adjust the resistance bond until the foreign structure potential at Location
4 is equal to or more negative than its native potential.
resistance bond
A
3
steel
rod
2
mag
anode
4
5
6
1
A
9V
10 ohm
Experiment Schematic No. 2
I. Measure and record potentials on both structures, at all reference locations,
measure CP and mitigation current, record bond resistance.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:61
Discussion Break
Experiment 2-1, cont’d
J. Disconnect the resistance bond and install a galvanic anode to mitigate the
interference as shown in schematic No. 3.
A
mag
anode
3
steel
rod
2
mag
anode
4
5
6
1
A
9V
Experiment Schematic No. 3
K. Measure and record all structure potentials, CP current, and galvanic
interference current (Igalv.).
Discussion Break
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:62
Results
Icp
B
Structure Potentials (mVCSE)
CP’d Structure
Foreign Structure
1
2
3
4
5
6
X
X
X
D
X
X
STEP
X
X
F
G
CP’d structure only
Foreign structure only
Both structures
X
X
X
Shift calculations
Mitigation
I
Ib = _______ Rb = ______ ohm
K
Igalv. ______
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:63
Experiment 2-1, cont’d
Conclusions
1. Foreign structure potential shifts electropositively at the stray current
discharge location (#4).
2. Foreign structure potential shifts electronegatively at the stray current pick-up
location (#6).
3. The CP current distribution on the cathodically protected structure is affected by
the presence of the foreign structure.
4. The CP current increases when the foreign structure is present.
5. The resistance bond mitigates the stray current interference on the foreign
structure.
6. The CP current increases with the resistance bond inserted, but the cathodically
protected structure is less well-protected.
7. A galvanic anode mitigation system can mitigate the interference problem and
maintain protection on the cathodically protected structure.
8. The stray current magnitude is greater for the resistance bond than for the
galvanic mitigation system.
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:64
2.2.1
Case Study
Two coated, cathodically protected pipelines cross each other at right angles and
are separated by 0.2 m. A single AWG #10 test lead is connected to each pipeline
and is routed into a common test station. Pipe-to-soil potential data is measured
independently on each pipeline while the other pipeline’s CP system is interrupted.
The recorded data are as follows:
A’s TR
Pipeline
A
B
ON
-1100
-930
B’s TR
OFF
-905
-980
ON
-1010
-980
OFF
-1100
-870
Does this situation require mitigation, or is further investigation required? Please
explain.
Assume mitigation is required and described how you would mitigate this situation
assuming a soil resistivity of 3500 Ω-cm.
Describe how you would test the piping after mitigation to determine if the piping
is adequately protected.
CP Interference Course Manual
© NACE International, 2006
January 2008
DC Interference
2:65
Summary of Equations
[2-1]
Rt,i = Ri,e + Ri,p
[2-2]
Ii =
where:
R t ,n
R t ,i
page 2:2
It
page 2:2
Rt,n = the total resistance of n parallel paths
1
=
R t ,n
1
1
1
1
+
+
+
R1
R2
R3
R4
⋅⋅⋅
1
Rn
and:
It =
I1 + I2 + I3 + I4 … In
R i,e = ρ s
[2-3]
L
A x,s
page 2:3
where:
Ri,e
ρs
L
Ax,s
=
=
=
=
resistance of the current path (ohm)
resistivity of the soil
length of current path
cross-sectional area of soil path
ρm
=
ρs
[2-4]
substituting:
ρm
= 10 -12
ρs
then:
A x,s =
CP Interference Course Manual
© NACE International, 2006
January 2008
A x,m
10 -12
A x,m
A x,s
page 2:4
DC Interference
2:66
A x,s =
10 -2
10 -12
= 1010 m 2
Vx,re =
[2-5]
I ρ s ⎡ ⎛⎜ L +
⎢ln
2πL ⎢ ⎜⎝
⎣
L2 + x 2
x
⎞⎤
⎟⎥
⎟⎥
⎠⎦
page 2:6
where:
Vx,re = voltage rise in earth with respect to remote earth at
a distance “x” from the anode
I = anode current output
ρs = soil resistivity
L = length of anode
Rv
[2-6]
=
⎧⎛ 8 L ⎞
⎫
ρ
2L
ln (0.656N) ⎬
⎟ −1+
⎨⎜ ln
2 π NL ⎩⎝ d ⎠
s
⎭
page 2:8
where:
Rv
ρ
L
d
=
=
=
=
resistance of multiple vertical anodes to remote earth (Ω)
soil resistivity (Ω-cm)
length of anode (cm)
diameter of anode (cm)
s = anode spacing (cm)
N = number of anodes
Rh
[2-7]
where:
[2-8]
CP Interference
© NACE International, 2006
January 2008
=
ρ
2πr
page 2:9
ρ = resistivity: Ω-m
r = radius of hemispherical electrode (m)
Rh = resistance to remote earth (Ω)
r =
ρ
2π Rh
page 2:9
DC Interference
2:67
R
[2-9]
R s,e
[2-10]
ρ
L
d
t
where:
=
=
=
=
⎛1
1⎞
⎜⎜ − ⎟⎟
r1 ⎠
⎝r
=
ρ
2π
=
⎧ (L )2 ⎫
ρ
ln ⎨
⎬
2πL
⎩ td ⎭
R s,re (discharge)
[2-12]
=
page 2:14
R S,L × R S,R
R S,L + R S,R
RS,O = RG coth αx
[2-13]
page 2:11
soil resistivity
length of pipe
diameter of pipe
depth below grade
Rs,e = Rs,c + Rs,re
[2-11]
page 2:10
page 2:15
page 2:15
where:
RG = characteristic resistance
α = attenuation constant
x = length of pipe
[2-14]
α =
where:
Rm
RL
page 2:15
Rm = lineal resistance of the pipe
RL = leakage resistance of pipe to earth
[2-15]
R m = ρm ×
where:
Rm
ρm
L
Ax
=
=
=
=
lineal resistance of the pipe
resistivity of pipe material
length of pipe section
cross-sectional area of pipe
CP Interference
© NACE International, 2006
January 2008
L
Ax
page 2:15
DC Interference
[2-16]
2:68
RL =
and where:
RL
r′c
L
AS
=
=
=
=
rC′
AS
page 2:16
leakage resistance of pipe to earth
specific resistance of pipe coating
length of pipe section
surface area of section = πdL
R S,O = R G =
[2-17]
Rm × RL
=
2.29 × 10 -4 Ω × 383 Ω
=
8.77 × 10 -2 Ω 2
page 2:17
= 0.296 Ω
Ra =
[2-18]
where:
Ra
ρ
L
d
=
=
=
=
ρ ⎧⎛ 8 L ⎞ ⎫
⎨⎜ ln ⎟ − 1⎬
2πL ⎩⎝ d ⎠ ⎭
resistance of anode to remote earth
soil resistivity (Ω-m) = 31 Ω-m
length of packaged anode (m) = 1.5 m
diameter of packaged anode (m) = 0.15m
L =
[2-19]
where:
L
Wt
U
E
Ia
Cr
[2-20]
CP Interference
© NACE International, 2006
January 2008
=
=
=
=
=
=
page 2:31
Wt × U × E
I a × Cr
page 2:32
effective service life (y)
total weight of anode alloy (kg)
utilization factor
efficiency
current output (A)
theoretical consumption rate (kg/A-y)
RR1 =
V1 (off , oc ) − V1 (on, oc )
IR
page 2:37
DC Interference
2:69
RR 2 =
[2-21]
V2 (on, oc ) − V2 (off , oc )
IR
page 2:37
RR1, 2 = RR1 + RR 2
page 2:37
[2-22]
[2-23]
RB1 =
V1 (on, cc ) − V1 (on, oc )
IB
page 2:37
[2-24]
RB 2 =
V2 (on, oc ) − V2 (on, cc )
IB
page 2:37
[2-25]
RB1, 2 = RB1 + RB 2
page 2:37
[2-26]
V1, 2 (off , oc ) = V2 (off , oc ) − V1 (off , oc )
page 2:37
[2-27]
RB =
V1, 2 (off , oc ) + I R RR1, 2
− RB1, 2
RR 2
IR
RB 2
I B (on ) =
[2-28]
I B (off ) =
[2-29]
I R RR 2
RB 2
V1, 2 (off , oc )
RB + RB1, 2
page 2:38
page 2:38
page 2:38
[2-30]
V1 (on, cc) = V1 (on, oc) + I B (on) RB1
page 2:38
[2-31]
V1 (off , cc) = V1 (off , oc) + I B (off ) RB1
page 2:38
[2-32]
V2 (on, cc) = V2 (on, oc) − I B (on) RB 2
page 2:38
[2-33]
V2 (off , cc) = V2 (off , oc) − I B (off ) RB 2
page 2:38
CP Interference
© NACE International, 2006
January 2008
DC Interference
2:70
IL = IR + Is + Ie
[2-34]
[2-35]
Vp/ s = α +
[2-36]
CP Interference
© NACE International, 2006
January 2008
ΔV p / s
ΔV p / r
Vg, x =
V p / r = α + βV p / r
Ie ρs
2πx
page 2:42
page 2:49
page 2:56
CHAPTER 3
AC INTERFERENCE
3.1
Introduction
Electrical energy from an overhead powerline can be transferred to a pipeline by
three possible mechanisms: electrostatic (capacitive) coupling, electromagnetic
(inductive) coupling, and conductive (resistive) coupling. The latter occurs only
during fault conditions. Each mechanism is discussed with respect to how it affects
pipeline integrity, along with the safety of pipeline personnel and the general
public. The methods that are available to predict both the effects of the
interference and the required mitigative measures are also discussed, as are the
methods for implementing the mitigation. Note that the prediction of alternating
current (AC) interference effects is a complex matter requiring fairly sophisticated
mathematics. This course discusses methods of estimating the effects for a few
very simple cases, but most problems can only be solved using either complicated
analytical techniques or specialized software.
A pipeline can experience AC interference as a result of being in the proximity of
any AC powerline. However, the vast majority of interference problems are
created by three-phase (3φ) power transmission systems (Figure 3-1a), because
these involve both high currents (during steady-state and fault conditions) and high
voltages. Moreover, these system are more likely to run parallel to pipelines for
long distances than—for instance—low-voltage distribution systems (Figure 31b).
A 3φ power transmission system consists of three energized conductors. Each
conductor has approximately the same voltage to ground, and each carries
approximately the same amount of current. One or two additional conductors,
known as shield wires, may also be present. Shield wires run between the tops of
the powerline support structures (Figure 3-1). Although their purpose is to protect
the powerline from lightning strikes rather than to transmit power, they
nevertheless affect how electrical energy is transferred to a pipeline.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:2
Figure 3-1a: Single Horizontal
3φ Circuit with Shield Wires
Figure 3-1b: Distribution System
(1φ 4kV Primary and 2φ 240V Secondary with Neutral)
In a three-phase circuit, the AC waveforms for each of the three phases are 120
degrees apart from one another (Figure 3-2). Waveforms that have the same
frequency but start and end at different times are said to be out-of-phase
with one another. When investigating the effects of AC interference on a pipeline,
phase relationships between waveforms are just as important as the magnitudes of
the waveforms; this will be discussed later in the chapter.
1
V
0
-1
0
90
180
270
360
Angle (Degrees)
Figure 3-2: AC Voltage Waveforms in a 3φ Circuit
3.1.1
Electrostatic (Capacitive) Coupling
With electrostatic coupling, energy is transferred through the electrical capacitance
that exists between the powerline and the pipeline. Any two conductors that are
separated by a dielectric material can be considered a capacitor. Capacitance is a
measure of the ability to store electrical charge Q between two conductors, relative
to the voltage V between the conductors; that is:
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:3
C=
Q
V
coulombs/volt
[3-1]
The unit of coulombs/volt is more commonly referred to as a farad (f).
Capacitance is proportional to the area A of the conductors but is inversely
proportional to the separation d between the conductors (Figure 3-3).
Furthermore, capacitance is directly dependent upon a physical property of the
dielectric material known as permittivity (ε), having the units of f/m. Therefore,
C=ε
C∝
A
d
[3-2]
A
d
Conducting Plate
(having area A)
d
Dielectric
Conducting Plate
Figure 3-3: Elements of a Capacitor
When a direct current (DC) voltage source is applied to a capacitor, current will
flow and charges will accumulate on the plates of the capacitor. As time passes
and charges continue to accumulate, the current flow decreases and eventually
becomes zero when the voltage on the capacitor is equal to the applied voltage.
This time period is very short; for all practical purposes, a capacitor appears as an
open circuit to DC.
When an AC voltage source is applied to a capacitor, current begins to flow and
the conducting plates again begin to accumulate charges. As the polarity of the
voltage source reverses during the second half of the AC cycle and current flows
in the opposite direction, however, the plates of the capacitor discharge and begin
charging with the opposite polarity. This process of charging, discharging,
charging in the opposite direction, and discharging again repeats itself every cycle,
and an AC continually flows through the capacitor. As the frequency of the
voltage source increases, fewer charges can accumulate on the capacitor’s plates.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:4
As a result, there is less opposition to the flow of current.
frequencies, a capacitor therefore appears as a short circuit to AC.
At very high
The opposition that a capacitor offers to the flow of AC is called capacitative
reactance, Xc. Reactance has the units of ohms (Ω) and is similar to resistance—
except that it not only controls the magnitude of the current flowing in the circuit,
but also affects the phase relationship between the voltage and the current (Section
3.2.1 discusses this). Reactance is dependent upon both frequency f and
capacitance and is determined by the following equation:
XC =
1
2πfC
[3-3]
Consider the case in Figure 3-4 where a pipeline is under construction. Lengths of
pipe have been strung out along the pipeline route and have been placed on
wooden skids in preparation for welding. Although this may not look like a
capacitor as previously discussed, the elements necessary for the construction of a
capacitor are present; these elements include two conductive plates separated by a
dielectric material. In this case, the powerline is one conductive plate and the pipe
is another. They are separated by air, which serves as a dielectric. Similarly, a
second capacitor is formed between the pipe and the earth because the earth
(although nonmetallic) is also a conductive plate. A section of pipe sitting on skids
beneath an AC powerline can therefore be represented as an electrical circuit
consisting of two capacitors in series with an AC source, which forms a capacitive
voltage divider.
Conducting
Plates
Air
Dielectric
Figure 3-4: Electrostatic Coupling during Pipeline Construction
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:5
Recalling Kirchhoff’s Laws, the sum of the voltage drops across the resistors in a
series circuit (Figure 3-5) will be equal to the sum of the voltage sources.
Furthermore, these voltage drops are in direct proportion to the resistances that
create them. Similarly, the voltage drops across the capacitors in an AC series
circuit will be in direct proportion to the respective capacitive reactances; their
sum will be equal to the sum of the voltage sources.
I
R1
I
V1
V
V1
C1
V
R2
V1
V2
=
V2
V2
C2
R1
V1
R2
V2
=
XC1
XC2
=
C2
C1
Figure 3-5: Voltage Divider Circuits – Resistive (left) and Capacitive (right)
Therefore, in the pipeline construction case of Figure 3-4, the line-to-ground
voltage of the powerline is divided between the two capacitors in inverse
proportion to their capacitances.
Depending upon the relative capacitance values and the powerline voltage, very
large voltages can be electrostatically generated on a single pipe joint—assuming
it is well insulated from earth. To provide a very rough estimate of the magnitude
of the induced voltages, consider the case of a single pipe section raised upon on
skids (Figure 3-6).
Example Calculation:
The pipe has a diameter of 0.3m and is 5m in length. It therefore has a
surface area of approximately 5m2. The powerline conductor has a much
smaller diameter than that of the pipe. Hence, it has a smaller surface area
while the underlaying earth has a greater surface area than the pipe. Assume
that these areas are 0.2m2 and 20m2, respectively.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:6
0.2 m2
100 kV
10 m
C1
5 m2
C2
1m
20 m2
Figure 3-6: Calculation of Typical Capacitance Values for a Pipe on Skids
The powerline conductor and the pipe, which form the two places of C1, have
different areas. So, in order to use Equation 3-2, the geometric mean of the
two areas is used. Similarly, the pipe and the earth lying beneath it have
different areas. So, the geometric mean is calculated to determine the area of
the plates for C2.
Amean =
A1 × A2
[3-4]
AC1 =
0.2m 2 × 5m 2 = 1m 2
AC 2 =
5m 2 × 20m 2 = 10m 2
The separation distance between the powerline conductor and the pipe is
typically much greater than between the pipe and the earth. These distances
are given as being 10m and 1m, respectively. The values of C1 and C2 can
now be calculated, given the permittivity of air (εair) has a value of 9×10-12
f/m.
C = ε air
C1 = 9 × 10
−12
C 2 = 9 × 10
CP Interference Course Manual
© NACE International, 2006
January 2008
−12
A
d
1m 2
f /m
= 9 × 10 −13 f
10m
10m 2
f /m
= 9 × 10 −11 f
1m
AC Interference
3:7
Again, note that these capacitance values are very rough estimates only;
although accurate capacitance values could be calculated, such a task would
involve much more complicated equations. It is only important to understand
that the pipe-to-earth capacitance should always be larger than the pipe-topowerline capacitance and that these capacitance values are typically very
small. For instance, a capacitor used on an electronic circuit board (having a
physical size similar to that of a pencil eraser) might have a capacitance of 10
× 10-6 farads (10 μf)—yet this capacitance would be roughly a million times
larger than the pipe capacitances calculated above.
In order to calculate the voltage that is electrostatically induced on the pipe in
Figure 3-6, the values of C1 and C2 are substituted into the capacitive voltage
divider circuit of Figure 3-5. In Figure 3-5, the voltage applied across the
capacitors is the line-to-ground voltage of the powerline; it is given as 100
kV in this example.
V pipe =
V pipe =
C1
V powerline
C1 +C 2
[3-5]
0.9 × 10 −12
100 × 10 3 V = 1000V
0.9 × 10 −12 + 90 × 10 −12
V = 100 kV
0.9 pF
V = 1 kV
90 pF
Figure 3-7: Calculation of Typical Electrostatically Induced Voltage for a Pipe on Skids
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:8
The pipe voltage in the example seems unrealistically high. However, this is
indeed the magnitude of voltage that might be typically induced electrostatically
on a single pipe joint—provided that the pipe is well-insulated from earth and that
the voltage is measured with a high-impedance voltmeter. In order to determine if
this voltage may present an electrical safety hazard, it is necessary to calculate the
current that could possibly be generated by this circuit.
The current that can be produced is limited by the reactance of the powerline-topipe capacitance (C1). The reactance is calculated using Equation 3-3.
X C1 =
1
1
=
= 3 × 10 9 Ω
−13
2πfC1
2π ⋅ 60 ⋅ 9 × 10
The current that can flow through a human body, assuming the worst-case of a
zero-ohm body resistance, is then determined using a calculation that is essentially
Ohm’s Law.
I body =
V powerline
X C1
=
100 × 10 3 V
≈ 30 μ A
3 × 10 9 Ω
Vpowerline = 100 kV
XC1 = 3 GΩ
I = 30 μA
Figure 3-8: Calculation of Typical Shock Current Resulting from Electrostatic Coupling
Such a low current is considered non-hazardous. It is in fact well below the 1-mA
threshold at which the human body can sense electric current (this is discussed in
Section 3.4.1). Therefore, even though electrostatic coupling can induce large
voltages on sections of pipe that are well-insulated from ground, the circuit
impedance is generally too high to produce a significant shock current.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:9
Consider the case where an automobile is parked beneath a high-voltage power
transmission line (Figure 3-9). Because the car is well-insulated from earth by the
rubber tires, the situation is very similar to the one illustrated in Figure 3-8. If the
high voltages generated by electrostatic coupling were capable of presenting an
electrical shock hazard, then consider the problems this scenario might cause to
the public.
V = 100 kV
C1 = 0.01C 2
V = 1 kV
C2
Figure 3-9: Calculation of Typical Electrostatically Induced Voltage for an Automobile
The sample calculations for a pipe raised up on skids were for the case of a single
pipe joint. As the pipe joints become welded together, the surface area of the pipe
increases and the pipe-to-powerline capacitance increases accordingly. This
results in a lower capacitive reactance between the pipeline and powerline, which
will permit more current to flow through the body (Figure 3-8). However, as the
pipeline increase in length, two other factors become important. Firstly, the
amount of energy being electromagnetically induced in the pipeline becomes
significant—more significant, in fact, than the electrostatically induced energy
(see Section 3.1.2). Secondly, as the pipe increases in length, the total resistance
between the pipe and earth through the increasing number of skids decreases.
Therefore, the voltage generated across C2 decreases (a bar pipe on skids would
have an even lower electrostatically induced voltage). Most importantly, however,
is that as the pipe joints are welded together the construction crews begin to lower
the pipe into the trench. This not only results in an even lower pipe-to-earth
resistance, but also results in a much higher pipe-to-earth capacitance (Figure 310).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:10
3 x 109
3 x 104
Figure 3-10: Calculation of Typical Electrostatically Induced Voltage for a Buried Pipe
Considering only the effect of the increased pipe-to-earth capacitance, a decrease
of the pipe-to-earth separation from 1m to 1mm (the thickness of the coating)
would result in a 1000 times increase in the capacitance C2, a 1000 times reduction
in the capacitive reactance XC2, and a 1000 times reduction in the pipe voltage
Vpipe. Electrostatically induced voltages thus essentially disappear once the
pipeline is laid into the trench.
Note that in the example of Figure 3-10, a pipe-to-ground capacitive reactance of
30 kΩ is sufficient to reduce the pipeline voltage from 1000 V to 1 V. This
suggests that when the pipe is raised up on skids, it should be very easy to ground
the pipe to mitigate electrostatically induced voltages. In practice, it is found that
nearly any type of ground connection—even one as insignificant as a test lead
connected to the pipe and contacting the earth—is often sufficient to completely
mitigate the induced voltages.
In the capacitance calculations in the examples above, note two things: the
capacitance calculations are very approximate and the effects of only one phase of
the three-phase circuit have been considered. It should also be apparent from the
sample calculations that powerline voltage—not powerline current—determines
the magnitude of the electrostatically induced pipe voltages.
Although electrostatic coupling generally cannot produce enough current to create
an electrical safety hazard, it may result in nuisance voltages that produce a
sensation similar to a shock from static electricity. This, in turn, could
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:11
conceivably create a secondary safety hazard if, for instance, someone on a
pipeline construction project was to overreact to the sensation of an electrostatic
voltage on a section of pipe.
Because electrostatically induced voltages are typically not hazardous and are
easily mitigated, the remainder of Chapter 3 will focus on the much more serious
concerns of electromagnetic and conductive coupling effects.
3.1.2
Electromagnetic (Inductive) Coupling
Voltages and currents are electromagnetically induced onto a pipeline in the same
manner that an inductive pipe locator induces an audio signal onto a pipeline or
the primary winding of a transformer induces current to flow through the
secondary winding.
First consider the flow of electric current in a simple conductor (Figure 3-11). The
flow of current creates an electromagnetic field around the conductor, indicated by
the lines of magnetic flux F. The intensity of the magnetic field is directly
proportional to the current magnitude and is inversely proportional to the distance
from the conductor. Using a convention known as the right-hand rule, if a person
were to place their right hand around the wire—with the thumb pointing in the
direction of current flow—the fingers would indicate the direction of the magnetic
flux.
Φ
I
Figure 3-11: Electromagnetic Field Created by Current Flow in a Wire
Electromagnetic induction occurs whenever there is a relative motion between an
electrical conductor and a magnetic field. This motion may result either from the
physical movement of a conductor through a stationary magnetic field, or the
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:12
movement of a magnetic field through a stationary conductor. The most obvious
example of the first case is an electrical generator, in which a rotating coil of wire
passes through a stationary magnetic field to generate electric current. A less
obvious example (discussed in the chapter dealing with telluric current
interference) is where the tidal movement of seawater (a conductor) passing
through the earth’s magnetic field creates geomagnetic earth currents. In the
second case, where both the source of the magnetic field and the conductor are
stationary, the magnetic field itself must be in motion in order to induce current in
the conductor. This is done by using AC to create a time-varying magnetic field,
which expands and collapses around the conductor, to create a relative motion.
The best example of this is an electrical transformer (Figure 3-12).
I1
Φ
I2
Figure 3-12: Electromagnetic Induction in a Multiple-Turn, Iron-Core Transformer
An AC I1 flows through the primary winding of the transformer. This creates a
magnetic field around each turn of the winding, and these fields link together to
create one large magnetic field. The magnetic field around this coil would
normally tend to stray well outside the vicinity of the coil; but, by introducing a
transformer core made of iron or some other magnetic material, the magnetic field
becomes primarily confined to the core. A secondary winding is also wound onto
the iron core. Also, the magnetic field created by the primary winding is now
expanding and collapsing around the turns of the secondary winding; the
secondary winding consequently induces a secondary current flow I2.
In order to make transformers energy-efficient, the windings and cores are
designed to transfer as much energy as possible from the primary winding to the
secondary winding. A transformer can be formed, however, simply by placing a
conductor within a time-varying magnetic field around another conductor (Figure
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:13
3-13); such a transformer would be highly inefficient, though. Note that in Figure
3-13, the induced current is not shown to be flowing in the same direction as the
primary current. Lenz’s Law states that the induced current flows in a direction
that creates a secondary magnetic field, which tends to oppose any change in the
primary magnetic field. Because this is AC, the arrows only indicate the current
direction at a particular instant of time. They are intended to show that the
secondary current is out of phase with the primary current.
Φ
I1
I2
Figure 3-13: Electromagnetic Induction in a Single-Turn, Air-Core Transformer
The case of the single-turn, air-core transformer in Figure 3-13 represents the
electromagnetic coupling that occurs when a pipeline runs parallel to a powerline
(Figure 3-14). Whereas the voltages that are generated electrostatically are
proportional to powerline voltage, the voltages and currents that are
electromagnetically induced are proportional to powerline current. As the length of
parallelism between the pipeline and powerline increases, the electromagnetic
coupling between them improves—just as increasing the number of turns on the
primary and secondary windings of a transformer improves the efficiency of the
transformer.
I1
Φ
I2
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:14
Figure 3-14: Electromagnetic Coupling Between a Pipeline and an Overhead AC Powerline
The AC that is induced in the pipeline results in pipe-to-ground voltages where the
current discharges into the earth. These electromagnetically induced currents and
voltages are a function of powerline current, not powerline voltage. The induced
voltages can affect both the integrity of the pipeline and the safety of personnel
and the general public. The prediction of the location and magnitude of the
voltage peaks. The design of an appropriate mitigation system to limit these peaks
to acceptable levels is the primary focus of this chapter. Section 3.5 will cover this
in detail.
3.1.3
Conductive Coupling (Resistive Coupling) During
Powerline Fault Conditions
Conductive coupling can occur when there is a line-to-ground short-circuit or fault
on the powerline (Figure 3-15). Under fault conditions, the current leaving the
powerline will return to its source using all paths available to it—including
powerline shield wires, the earth, and metallic structures in the earth such as
pipelines.
Figure 3-15: Conductive Coupling During Line-to-Ground Fault Conditions
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:15
The amount of current that is transferred to a pipeline is dependent upon the
relative impedances† of all parallel paths available to the fault current. It is a
function of the separation distance between the faulted structure and the pipeline,
the available fault current, the impedance of the faulted structure to ground, and
the pipe-to-earth impedance.
On high-voltage powerlines faults are most likely to occur as the result of
lightning, which can ionize the air in the vicinity of an insulator. Faults can also
occur as the result of high winds, failure of the powerline structures or insulators,
or accidental contacts between the powerline and other structures—such as cranes
and other construction equipment.
Fault current is transferred to the pipeline through the pipeline coating. The better
the coating quality (i.e., the fewer the holidays) and the higher the coating’s
dielectric strength (i.e., breakdown voltage), the lower the current transfer to the
pipeline.
Because fault currents are much greater in magnitude than steady-state powerline
currents, conductive coupling can result in very high pipeline voltages. However,
power system protection devices limit the length of time that these voltages are
present on the pipeline to a fraction of a second (typically 0.1s or less on highvoltage systems but longer on low-voltage systems). Even over such a short time
period, large amounts of energy can be transferred to the pipeline—resulting in
coating damage or even pipeline failure caused by melting or cracking of the pipe
wall.
The high pipeline voltages resulting from conductive coupling represent a safety
hazard to pipeline personnel and, perhaps, the general public in cases where test
leads and pipeline appurtenances are accessible. Electric shocks can be painful
and can result in the loss of muscular control at body currents of less than 50 mA,
but the primary concern for short-duration shocks resulting from fault currents is
ventricular fibrillation. Ventricular fibrillation is a condition that may occur at
body currents greater than 50 mA and certainly occurs at body currents greater
than 100 mA. It results in the total loss of coordination of the heart caused by the
disruption of its electrical signals. It will lead to death without defibrillation (i.e., a
strong electrical pulse to restore the heart to its normal beating pattern).
†
To this point, resistances and reactances have been discussed. When dealing with AC circuits, any
combination of resistance, capacitive reactance, and inductive reactance (see Section 3.2.1), is in general
called an impedance.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:16
In addition to conductive coupling, fault conditions also affect the voltages and
currents that are electromagnetically induced on the pipeline. Fault conditions
result in increased powerline currents and large imbalances between the phases,
which can greatly increase the induced pipeline voltages—albeit for short periods
of time.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:17
Experiment 3-1
To Demonstrate the Effects of Electrostatic Induction
3’
2’
Copper
Plate
V
AC
Meter
Test Probe
1’
Ground Pin or
Screwdriver
Procedure
Note: This experiment is to be conducted beneath the powerlines at the NACE test site,
or beneath any high-voltage AC powerline. The experiment may be conducted by
one large group or by several smaller groups.
Step:
A. Install a ground pin (or screwdriver) into the soil, 2 to 3 inches deep.
B. Connect a high-impedance AC voltmeter (or digital multimeter, with ACV
selected) to the ground pin using a test lead with an alligator clip.
C. Connect a test lead with a test probe to the other terminal of the voltmeter.
D. Beginning at a height of 1 foot above grade, increase the height of the test
probe at approximately 1-foot intervals until a reaching a height of 6 or 7
feet is reached (taking an AC voltage measurement each time).
E. Disconnect the test probe from the meter and connect a test lead having an
alligator clip.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:18
F. Connect the alligator clip to the copper plate and repeat each of the AC
voltage measurements. If possible, support the plate by contacting only the
insulated cover of the alligator clip.
G. Repeat the measurements in Step F while holding directly onto the copper
plate—and while one knee is contacting the ground.
H. If there is a car parked near the powerline, measure the AC voltage between
the steel frame of the car and the ground pin.
Results
Height
(ft)
AC Voltage Measurement (V)
Copper Plate
Copper Plate
Probe
(Standing)
(Kneeling)
1
2
3
4
5
6
7
Questions for Discussion
1. What are the voltages being measured with the meter test probe suspended
in the air? Is this just electrical noise? Why?
2. In what way do the voltage measurements change when the meter is
connected to a copper plate? Why?
3. Does it seem that the measured voltages should be higher, lower, or similar
to those recorded?
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:19
4. What happens to the voltages measured using the copper plate when one
knee contacts the earth? Why?
5. How does the voltage measured on the car compare with those measured on
the copper plate? Explain.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3.2
3.2.1
3:20
Basic Theory of Electromagnetically Induced
Voltages
AC Circult Theory
Before starting a detailed discussion of how AC voltages are electromagnetically
induced on a pipeline, it is important to understand some of the basic principles of
AC circuits.
Consider first the case of a transformer. The voltage induced in the secondary
winding (VS) relative to the primary voltage (Vp) is equal to the ratio of the number
of turns in the secondary winding to those in the primary winding (see Equation 34a).
VS
N
= S
Vp
Np
[3-6a]
Alternatively, one may think of this relationship in the following terms: the
volts/turns ratio for the primary winding is equal to the volts/turns ratio for the
secondary winding, or windings, in the case of a transformer having multiple
secondary windings.
Vp
Np
=
VS
NS
[3-6b]
For example, 100V is applied to the primary winding of the transformer in Figure
3-16. Because this winding has 100 turns, then the volts/turns ratio is 1V/turn.
This same volts/turns ratio also applies to the secondary winding having only five
turns, so that it will develop a voltage of 5V.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:21
100 V
100 Turns
1 V/turn
5 turns
5 turns
5 turns
1 V/turn
V
⎛N ⎞
⎛ 5 ⎞
VS = VP ⎜ S ⎟ =100V⎝
= 5V
⎝ NP ⎠
100 ⎠
Figure 3-16: Determination of Voltage on a Transformer Secondary
Now consider the case where several secondary windings of the transformer are
connected together in series (Figure 3-17). Assuming that all of the secondary
windings have been wound onto the transformer core in the same direction, then
the voltages are additive.
100 V
100 Turns
5 turns
V1
5 turns
V2
V
5 turns
V3
1 V/turn
1 V/turn
V = V1 + V2 + V3
= 5V + 5V + 5V
= 15V
Figure 3-17: Effect of Interconnecting the Secondary Windings
This is analogous to adding the voltages of a number of batteries that are
connected together in series, as shown in Figure 3-18a. If, however, one of the
batteries was reversed (Figure 3-18b), then its voltage would be added to the
voltages of the other batteries as a negative value.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
(a)
3:22
(b)
1.5V 1.5 V 1.5 V
1.5V 1.5 V 1.5 V
V
-
V
+
-
+
V = 1.5V -1.5V +1.5V =1.5V
V = 1.5V +1.5V+1.5V = 4.5V
Figure 3-18: Effect of Polarity on a Series Combination of DC Voltage Sources
Consider once again the case of the transformer in Figure 3-17. Although AC
voltages and currents exhibit no polarity in the DC sense, reversing the
connections to one of the secondary windings would be akin to reversing the
polarity of one battery in Figure 3-18—as Figure 3-19 shows.
100 V
100 Turns
5 turns
5 turns
5 turns
1 V/turn
1 V/turn
V
V = 5V - 5V + 5V = 5V
Figure 3-19: Effect of “Polarity” on a Series Combination of AC Voltage Sources
Even though the polarity of an AC voltage continuously alternates from positive to
negative, the voltages in the specific case shown can still be added and subtracted
just as if they exhibited a constant polarity. When working with AC circuits, the
term “polarity” is generally not used because it applies only to a particular instant
in time. Instead, waveforms are compared in terms of their phase relationships.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:23
AC waveforms are said to be either in-phase or out-of-phase with one another.
“In-phase” means that two waveforms have the same polarity at every instant in
time (Figure 3-20). In the case of the transformer in Figure 3-17, the voltages in
all three secondary windings must be in-phase with one another because they are
all generated by the same magnetic field. When the connections are reversed on
the middle winding, its voltage waveform becomes exactly out-to-phase with the
waveforms of the other two windings. In other words: the waveforms start at the
same instant in time but, when one goes positive, the other goes negative.
When viewed on an oscilloscope, an AC waveform indicates the variation of the
voltage or current versus time. When the frequency of the waveform is 60 Hz, the
period of the waveform is 1/60 s or 16.67 mS. When solving interference
problems related to AC power systems, the frequency of all waveforms will be the
same (either 50 Hz or 60 Hz, depending upon the country). Therefore, frequency
(and time) can be omitted from the analysis. Instead, it is easier to discuss
waveforms in terms of phase angle (Figure 3-20): one full cycle of the sinusoidal
waveform is comprised of 360 degrees or, alternatively, 2π radians.
Voltage or Current
1
0
-1
0
90
0
π/2
0
4.2
180
270
Angle (Degrees)
π
3π/2
Angle (Radians)
8.3
12.5
Time (ms) at 60 Hz
360
2π
16.6
Figure 3-20: In-Phase 60 Hz AC Waveforms
To better understand the use of phase angles in AC circuits, consider the case of a
typical distribution transformer that would be used to supply a residential electrical
service (Figure 3-21). The secondary of the distribution transformer consists of
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:24
two windings, both of which supply approximately 120 V. Recognize that the
secondary windings would exhibit no voltage with respect to ground in the
configuration shown because all terminals of the secondary windings are floating.
In order for there to be any relationship between the voltages across the secondary
windings and ground, a connection must be made between one of the secondary
terminals and earth. In a residential electrical service, this connection is made at
the connection between the two windings (Terminal B)—as shown in Figure 3-22.
4140 V
4140 V
120 V
120 V
Figure 3-21: Typical Electrical Distribution Transformer
4140 V
4140 V
A
+120
V
120 V 120 V
B
C
-120
V
Figure 3-22: Typical Residential Electrical Service
By connecting Terminal B to ground, the voltage at this point is forced to become
0 V with respect to earth. Furthermore, because a voltage of 120 V exists across
each of the windings, there is now a voltage of 120 V with respect to earth at both
terminals A and C. It is important to realize, however, that the voltages at these
two terminals are completely out-of-phase with one another. At a moment when
the voltage across the windings is rising with the polarity indicated by the arrows,
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:25
Terminal A will have a positive polarity while Terminal B will have a negative
polarity. The AC voltage waveforms with respect to earth would therefore appear
as shown in Figure 3-23
1
Voltage
Terminal A
0
Terminal C
-1
0
90
0
π/2
180
Angle (Degrees)
π
Angle (Radians)
270
360
3π/2
2π
Figure 3-23: AC Waveforms on a Residential Electrical Service
The two waveforms in Figure 3-23 are said to be 180 degrees out-of-phase with
one another because any point on one waveform is found on the other waveform to
be shifted horizontally by 180 degrees. When waveforms are in-phase with one
another, such as those in Figure 3-20, they have a phase shift of 0 degrees between
them.
In general, any sinusoidal AC voltage waveform v(t) can be described by the
following equation:
v(t ) = Vm cos (ωt + φ)
[3-7]
where Vm is the peak voltage, ω is the angular frequency, t is time, and φ is the
phase angle of the waveform. Angular frequency simply expresses frequency in
either degrees/second—or, more commonly, in radians/second—rather than in
cycles per second and is therefore simply:
ω = 2πf
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-8]
AC Interference
3:26
The phase angle is the angle in degrees (or radians) that the subject waveform is
shifted from a pure cosine wave. Equation 3-7 is plotted in Figure 3-24 for the
cases where the phase shift is equal to 0 degrees and –45 degrees.
Vm1
φ=0° φ=-45°
0
-Vm
-1
0
90
180
270
360
ωt (Degrees)
Figure 3-24: Plot of General Equation for Sinusoidal AC Waveforms
When performing analysis on AC waveforms having the same frequency, the only
quantities required to distinguish a waveform are its amplitude and its phase angle.
Therefore, instead of using Equation 3-7 to denote a waveform’s characteristics,
phasor notation is used. A sinusoidal AC voltage waveform can be identified in
phase notation as:
V = V∠φ
[3-9]
where V is the voltage phasor, V is the magnitude of the voltage waveform, and φ
is its phase angle with respect to a pure cosine wave. Therefore, recalling the
example of a residential electrical service in Figure 3-22, the correct way to refer
to the voltages at terminals A and C would be 120V /0° and 120V /180°,
respectively, rather than +120V and –120V. Phasors can also be represented
graphically using a phasor diagram. The graphical representation is essentially a
vector, having its origin at (0,0), having a length equal to the voltage magnitude,
and an angle with respect to the positive x-axis is equal to the phase angle. For
example, two waveforms having the phasor notations 1V /0° and 1V /45° would
be represented graphically as shown in Figure 3-25.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:27
Y-axis
+1
1V /45°
1V /0°
-1
+1
X-axis
-1
Figure 3-25: Typical Phasor Diagram
Phasor diagrams are important because they help illustrate how AC voltages and
currents must be added and subtracted. In the case of determining the total voltage
of a series of batteries (Figure 3-18), the voltages are simply added or subtracted
based on their polarities. The same is true when dealing with AC voltages that are
either in-phase, or 180 degrees out-of-phase—as was the case with the transformer
windings in figures 3-17 and 3-18. However, when determining a voltage
difference between two points in an AC circuit—where the phase difference
between the waveforms is something other than 0 degrees or 180 degrees—the
rules of vector algebra must be applied.
Example Calculation:
Two AC voltage sources are connected together in series, as shown in Figure
3-26. Both have a voltage output of 1 V; however, the waveforms are 45°
out-of-phase with one another. Determine the total voltage of the system.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:28
1V /0°
1V /45°
A
B
VAB
Figure 3-26: Series Combination of AC Voltage Sources
The voltages of the two AC sources can be added together using the phasor
diagram in Figure 3-27 and the rules of vector algebra. In order to add the
two phasors together, the vector for source B is shifted horizontally so that its
tail is placed at the head of the vector for Source A—as shown in Figure 327. The total voltage for the two sources is then provided by the new vector
running from the origin to the head of the vector for source B.
Y-axis
+1
VAB
φΑΒ
VA =
1V /0°
-1
+1
V B=
1V /45°
X-axis
-1
Figure 3-27: Phasor Diagram for Problem in Figure 3-26
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:29
If this diagram was drawn to scale, then VAB could be determined using a
ruler to measure its magnitude, ⏐VAB⏐, and a protractor to measure its phase
angle, /φAB. An easier and more accurate way, however, is to use
trigonometry.
The vectors for VA and VB are broken down into x- and y- components. The
x- and y- components for VAB are then determined by adding the xcomponents together and then adding the y-components together, as follows:
X-component of VAB:
1⋅ cos(0º) + 1⋅ cos(45º) = 1+ 0.71 = 1.71
Y-component of VAB:
1⋅ sin(0º) + 1⋅ sin(45º) = 0 + 0.71 = 0.71
The magnitude and phase angle for the new vector is then determined as
follows:
Magnitude of VAB:
V AB = x 2 + y 2 = 1.712 + 0.712 = 1.85
Angle of VAB:
⎛ 0.71 ⎞
⎛ y⎞
∠V AB = tan −1 ⎜ ⎟ = tan −1 ⎜
⎟ = 22.5°
⎝ 1.71 ⎠
⎝x⎠
Note that most scientific calculators can now add and subtract vector
quantities directly, without the need to break the vectors down into
components and then reassemble them.
Phasor multiplication and division are much simpler procedures than addition
and subtraction. To determine the product of two phasor quantities, their
magnitudes are multiplied together while their angles are added together.
Division is done similarly, as shown below:
Α∠φ × Β∠θ = Α ⋅ Β∠( φ + θ)
[3-10]
Α∠φ ÷ Β∠θ = Α ÷ Β∠( φ − θ)
[3-11]
In addition to vector algebra, the analysis of AC circuits requires the use of
complex mathematics involving the use of both real and imaginary numbers.
This is a difficult concept for some to understand, but it can be simplified as
follows.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:30
In complex mathematics, the x- and y- axes in the phasor diagram of Figure
3-25 are renamed the real and imaginary axes, respectively. Any phasor
A/φ can then be broken down into real and imaginary components as follows:
A = x + jy
[3-12]
where the real part of A, Re(A) is determined as:
x = ⏐A⏐cosφ
[3-13]
and where the imaginary part of A, Im(A) is determined as:
y = ⏐A⏐sinφ
[3-14]
The significance of j is to denote the imaginary component of the phasor, and
it is known as the complex operator. The mathematical equivalent of j is:
j = −1
[3-15]
hence it is referred to as an imaginary number. Note that in mathematics, an
imaginary number is typically represented by the symbol I; but, so as not to
confuse it with the symbol for current, electrical engineers have adopted the
symbol j.
Although the mathematical definition for j can be perplexing, its use in AC
circuit calculations is not. In essence, j is simply a phasor having a
magnitude of unity and a phase angle of 90 degrees; that is,
j = 1/90º
[3-16]
Therefore, if a phasor is multiplied by j, the magnitude of the phasor is
unaffected; however, the phase angle becomes increased by 90º. Similarly, if
a phasor is divided by j, its magnitude is unaffected but its phase angle will
be decreased by 90º. Multiplication by -j has the same effect as dividing by
+j, as shown below:
A/φ × j = A/φ × 1/90º = A/φ + 90º
[3-17]
A/φ × (-j) = A/φ × -1/90º = A/φ + 90º = A/φ – 90º
[3-18]
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:31
A/φ ÷ j = A/φ ÷ 1/90º = A/φ – 90º
[3-19]
One of the uses for the complex operator is the calculation of impedances, along
with determining what effect an impedance has on the phase angle of an AC
waveform. Just as the two AC voltage sources could not be added together
directly in Figure 3-26, a resistance and a capacitive reactance connected together
in series cannot be simply added together to determine their combined impedance.
Consider again the case of a capacitor in an AC circuit (Figure 3-28), as previously
discussed. The magnitude of the reactance offered by the capacitor is given by
Equation 3-3; therefore, the magnitude of the current I from the voltage source V
can already be determined. However, to determine the effect that the capacitor has
on phase angle, the following formula must be used:
XC =
IC
1
j 2πfC
[3-20]
C
V
Figure 3-28: Determination of Current through a Capacitor
The current is then calculated using Ohm’s Law as:
IC =
V
V
=
= j 2πfCV = 2πfCV∠90°
XC
⎛ 1 ⎞
⎜⎜
⎟⎟
⎝ j 2πfC ⎠
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-21]
AC Interference
3:32
By studying Equation 3-21, the capacitor is found to shift the phase angle of the
current by 90 degrees relative to the voltage waveform. This is illustrated
graphically in Figure 3-29.
90° Shift
V 1
m
Applied Voltage
0
Resulting
Current
-Vm
-1
0
90
180
270
360
ωt (Degrees)
Figure 3-29: Voltage and Current Waveforms for a Purely Capacitive Circuit
Because the current waveform is starting 90 degrees before the voltage waveform,
it is said that the current leads the voltage in a capacitor.
Now consider the case of an inductor, L (Figure 3-30). In the same way that
reactance in a capacitor results from the accumulation of electrical charges,
reactance in an inductor results from the generation of a magnetic field. An
inductor is generally a coil of wire; however, any conductor (such as a pipeline)
has an inductive component.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:33
IL
L
V
Figure 3-30: Determination of Current through an Inductor
The reactance of an inductor is calculated as:
X L = j 2πfL
[3-22]
Because inductive reactance is proportional to frequency, an inductor has the
opposite behavior to that of a capacitor; in effect, the inductor appears as a short
circuit to DC and as an open-circuit to very high-frequency currents.
Once again, Ohm’s Law can be used to determine the current through the inductor:
IL =
V
V
V
=
=
∠ − 90°
XL
j 2πfL
2πfL
[3-23]
The phase angle for the current in Equation 3-23 indicates that an inductor shifts
the phase angle of the current by –90 degrees relative to the voltage waveform; it
is therefore said that the current lags the voltage in an inductor. This is illustrated
graphically in Figure 3-31.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:34
-90° Shift
Vm1
Resulting
Current
Applied
Voltage
0
-Vm
-1
0
90
180
270
360
ωt (Degrees)
Figure 3-31: Voltage and Current Waveforms for a Purely Inductive Circuit
The effect of capacitors and inductors on the phase angle of the current can be
remembered by the following simple pneumonic device: “ELI the ICE man.” This
indicates that E leads I in an inductive (L) circuit, whereas I leads E in a capacitive
(C) circuit.
As Section 3.1 notes, this discussion of AC interference applies primarily to 3φ
AC power lines having voltage waveforms that are 120 degrees apart—as shown
in Figure 3-2. The phasor representation of such a 3φ circuit is shown in Figure 332.
Phase
C
+1200
Phase
A
Phase
B
-1200
Figure 3-32: Phasor Representation of a Three-Phase Circuit
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:35
When dealing with 3φ powerlines, the system voltage is always specified in terms
of the line-to-line voltage: that is, from phase A to phase B, phase B to phase C, or
phase C to phase A. As the phasor diagram shows, the phase-to-phase voltage
(from the tip of one phasor to the tip of another) is greater than the phase-toground voltage (the length of any one phasor). To determine the relationship
between the phase-to-phase and phase-to-ground voltages, apply the rules of
vector algebra as follows:
Vφ–φ =
VA – V B
=
Vφ–G /0º – Vφ–G /120º
=
(Vφ–G cos 0º + jVφ–G sin 0º) – (Vφ–G cos 120º + jVφ–G sin 120º)
=
(1.5V – j0.866V) VΦ − G
∴ Vφ − φ =
1.5 2 + (− .866 ) ⋅ Vφ−G =
2
3 Vφ − G
[3-24]
Example Calculation:
Determine the line-to-ground voltage of a 500-kV transmission line.
Vφ − G =
3.2.2
Vφ − φ
3
=
500 kV
= 289 kV
3
The Nature of Induced AC Pipeline Voltages
In the discussion of electromagnetic coupling in Section 3.1.2, it was shown that
AC could be induced in a pipeline by a mechanism similar to that used in a
transformer. It will now be discussed how these induced pipeline currents result in
pipe-to-ground voltages.
Consider the electrical model of the pipeline shown in Figure 3-33. An AC
voltage source represents the electrical energy induced in the pipe. The magnitude
and phase angle of the resulting current that travels down the pipe will depend
upon the longitudinal impedance internal to the pipeline—as well as on the shunt
impedance between the pipeline and the earth. The longitudinal impedance is
made up of the series combination of the longitudinal resistance of the pipe steel
(RL) and the longitudinal inductance of the pipeline (LL). The shunt impedance is
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:36
made up of the parallel combination of the coating resistance (RC) and the shunt
capacitance across the coating (CS), which is discussed in Section 3.1.1.
V
RL
CS
LL
RS
Figure 3-33: Electrical Model of Single Pipe Section
The shunt capacitance and the longitudinal inductance are very important when
conducting induced AC pipeline calculations, but the model will be simplified
(Figure 3-34) to illustrate how pipe voltages are generated along a pipeline.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:37
V
RL
RS
Figure 3-34: Simplified Electrical Model of Single Pipe Section
Alternatively, the pipe section can be modeled as shown in Figure 3-35, where the
shunt resistance RS is split into two parallel shunt resistances of 2RS. These
models can be combined together to model a long pipeline as shown in Figure 336; however, for a simple analysis, two pipe sections will be sufficient (Figure 337). Note that the parallel combination of two shunt resistances of 2RS in Figure
3-37 has been simplified to form a single shunt resistance of RS in Figure 3-38.
RL
2RS
2RS
Note: RS = 2RS // 2RS
Figure 3-35: Simplified Electrical Model of Single Pipe Section
Figure 3-36: Series Combination of Multiple Pipe Sections
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:38
RL
2RS
RL
2RS
2RS
2RS
Figure 3-37: Series Combination of Two Pipe Sections
RL
RL
2RS
RS
2RS
Figure 3-38: Series Combination of Two Pipe Sections (Simplified)
Example Calculation:
The simple electrical network in Figure 3-38 can be solved using Kirchhoff’s
Law, which states that the sum of the voltage sources in any loop of a circuit
is equal to the sum of the voltage drops. Assuming that a current of I1 flows
in the first loop and a current of I2 flows in the second loop (Figure 3-39), the
following formulae can be derived:
V1
A
RL
I1
2RS
B
RS
V2
RL
I2
C
2RS
Figure 3-39: Circuit Analysis Using Kirchhoff’s Law
V1 = I1RL + I1RS – I2RS + 2I1RS
V2 = I2RL + I2RS – I1RS + 2I2RS
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:39
In this simple example, it is assumed that the magnetic field to which the
pipeline is exposed is uniform along the length of the pipeline. Therefore,
the energy transferred to the first section of pipe will be equal to that
transferred to the second section of pipe and V1 = V2. Therefore, the above
equations must be equivalent, and
I1RL + I1RS – I2RS + 2I1RS
I2 (RL + 4RS )
∴ I2
= I2RL + I2RS – I1RS + 2I2RS
= I1 (RL + 4RS )
= I1
Finally, because I1 and I2 are equal, they can both be replaced in Figure 3-39
with I; also, Figure 3-39 can be simplified as shown in Figure 3-40.
A
V
RL
I
2RS
B
V
RS
RL
I
C
2RS
Figure 3-40: Circuit Analysis Using Kirchhoff’s Law
From Figure 3-40, it is a simple matter to calculate the pipe voltages at each
end of the pipeline (points A and B) and at the middle of the pipeline (Point
B).
VA = 0 – 2RSI
= –2RSI
VB = IRS – IRS = 0
VC = 0 + 2RSI
= +2RSI
These voltages have been plotted in Figure 3-41. This plot indicates that for a
simple induced AC problem—where the electrical characteristics of the pipeline
and the magnetic field generated by the powerline are both constant along the
length of the pipeline—that the induced AC voltage will be zero at the middle of
the pipeline and will peak at the ends of the pipeline. Furthermore, the voltage
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:40
peaks at the ends of will be equal in magnitude; but, they will be of opposite
polarity—or, more accurately, the phase angles for the voltages at each end of the
pipeline will be 180 degrees apart.
V
+2RsI
0
A
B
C
Distance
-2RsI
Figure 3-41: Induced AC Voltage Profile along Two-Section Pipe Method of Figure 3-39
If voltage measurements are taken at various points along a similar pipeline using
an AC voltmeter, the voltage profile in Figure 3-42 would be obtained. The
differences in the phase angles of the induced AC voltages could not be
determined using a voltmeter but would be as shown in the figure.
Vpeak
Magnitude
0
Distance
180º
Phase Angle
0º
Distance
Figure 3-42: Profile of Induced AC Voltages and their Phase Angles
along any Pipeline having Uniform Electrical Characteristics
The AC voltage profiles given above are based on a model consisting of only two
pipe sections. A similar analysis could be conducted on a larger model, such as the
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:41
one in Figure 3-36; however, this would require much more rigorous mathematics.
Nevertheless, a larger model would yield identical results. Again, this assumes that
both the pipeline electrical characteristics and the magnetic field as seen by the
pipeline are constant along the entire length of the pipeline. It also assumes that
the pipeline is electrically short, or non-lossy.
An electrically short pipeline is one where the longitudinal impedance looking
down the pipeline is much lower than the shunt impedance between the pipeline
and the earth. A well-coated pipeline has a high impedance to earth and would
likely be considered electrically short. However, as the pipeline becomes
physically long, the longitudinal impedance of the pipeline increases and its shunt
impedance to earth decreases. When the longitudinal impedance can no longer be
considered insignificant compared to the shunt impedance (i.e., when the pipeline
starts to become lossy), the pipeline can no longer be considered electrically short
and its AC voltage profile will start to exhibit non-linear behavior (Figure 3-43).
V
Pipeline Becoming
Increasingly Lossy
L/2
0
0
Distance
L
Figure 3-43: Effect of Electrical Length of Pipeline on AC Voltage Profile
This exponential signal attenuation is similar to what one sees with cathodic
protection (CP) currents, except that the AC attenuation constant that determines
the shape of the attenuation curve differs from the DC attenuation constant. This
variation exists because the AC attenuation constant is a function of pipeline
inductance and shunt capacitance—not just the longitudinal and shunt resistances.
Note that electrically long pipelines subjected to electromagnetic coupling can
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:42
exhibit zero voltages over much of their length, provided that the electromagnetic
field and the electrical characteristics of the pipeline and the soil are uniform along
this length.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:43
Experiment 3-2
To Demonstrate the Effects of Electromagnetic Induction
AC Power Line
VAC
Pipe Test
Lead
1
2
3
4
5
6
7
8
9
10
Coated Pipe Section
Experiment Schematic No. 1
Procedure
Note: This experiment is to be conducted on the buried section of coated pipeline at the
NACE field test site or be omitted. The experiment may be conducted by one
large group or several smaller groups.
Step:
A. Using a high-impedance AC voltmeter (or digital multimeter, with ACV
selected), measure the AC voltage on each of the pipe test leads with
respect to a ground pin placed near the base of the test station (TS).
B. At TS #1 only, monitor the AC voltage for one or two minutes to determine
if it varies with time.
C. Return to the classroom and plot the results versus test station number.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:44
Results
TS #
1
2
3
4
5
6
7
8
9
10
Voltage
(AC mV)
Questions for Discussion
1. Does the plot of induced voltages along the pipeline appear as expected?
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3.3
3:45
Induced AC Voltages
3.3.1 Factors that Affect the Longitudinal Electric Field
The electromagnetic field produced by the powerline current generates an electric
field running longitudinally along the pipeline—known as the Longitudinal
Electric Field (LEF)—that has the units of volts per meter (V/m). The LEF is
represented by the symbol E. It is a complex number, meaning that it has a
magnitude and a phase angle. The voltages that are induced on the powerline are
directly proportional to the magnitude of the LEF.
The LEF is directly proportional to the electromagnetic field and is therefore
directly proportional to the powerline phase currents. Furthermore, because the
electromagnetic field strength varies inversely with distance from the powerline,
so does the LEF.
The LEF is also a function of how the conductors are arranged on the tower. In
addition to the horizontal configuration shown in Figure 3-1, the phase conductors
may be arranged vertically (figures 3-44 and 3-45), in a delta configuration (Figure
3-46), or in other, less orderly configurations. Note that even for the two vertical
configurations shown, in one case the phase conductors are arranged truly vertical
with respect to one another. In the other case, however, the middle conductor has
been offset from the upper and lower conductors.
Figure 3-44: Double Vertical Circuit
CP Interference Course Manual
© NACE International, 2006
January 2008
Figure 3-45: Quadruple Vertical Circuit
AC Interference
3:46
Figure 3-46: Single Delta Circuit
The separation distance between the phase conductors is also a primary factor. In
general, the LEF increases linearly with increasing conductor separation. The
reason for this is described below.
Consider the case of an AC power cord for an electrical appliance. If one was to
take a clamp-on AC ammeter and attempt to measure the current being drawn by
the appliance, the ammeter would read zero. This is because the current entering
the appliance is equal to the current leaving it, except that these currents are
exactly 180 degrees out-of-phase with one another. Therefore the electromagnetic
fields created by the two conductors cancel each other out completely and the net
magnetic field sensed by the ammeter is zero. Similarly, if a clamp-on ammeter
was placed around all three phase conductors supplying a piece of three-phase
equipment, the current entering would equal the current leaving—even though this
is less obvious than in a single-phase case. Therefore, the net magnetic field
surrounding the conductors would again be zero.
The clamp of a clamp-on ammeter completely surrounds a conductor. It therefore
senses the entire magnetic field created by the current in the conductor. In the
case of a pipeline-powerline corridor, the pipeline senses only a portion of the
magnetic fields created by the currents in each of the phase conductors; also, it
senses them in inverse proportion to the separation distances to each conductor.
Consider the case of a single horizontal circuit (Figure 3-47). The conductor
whose magnetic field will have the greatest effect on the LEF generated along the
pipeline will be Phase C, whereas the conductor having the least effect will do so
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:47
in Phase A. The greater the separation distance ratios PC/PA, PC/PB, and PB/PA,
the less cancellation will exist between their magnetic fields as seen by the
pipeline and the greater the LEF.
B
A
C
PB
PC
PA
P
Figure 3-47: Effect of Phase Conductor Separation
If one considers the extreme case of all three phase conductors being bundled
together into a single three-conductor cable, then the pipe-to-conductor separation
distances for all three phases would be essentially equal and the pipeline would see
no net magnetic field. This is one of the reasons why pipelines are generally
unaffected by buried three-phase cables that run parallel and in close proximity to
the pipeline.
Another primary factor affecting the LEF applies only to multiple-circuit
powerlines (such as the one shown in Figure 3-44) is the physical arrangement of
the phases for one circuit versus the other. Four possible phase arrangements for a
double vertical circuit powerline are shown in Figure 3-48.
A
B
A
B
A
B
C
B
A
B
C
A
A
B
B
A
C
C
C
A
C
B
C
C
Centre Line
Symmetric
Centre Point
Symmetric
Full Roll
Partial Roll
Figure 3-48: Phase Arrangements for a Double Vertical Circuit
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:48
In the same way that increased conductor separation reduces cancellation effects
between the fields created by the three phases, the arrangement of phases on a
double-circuit powerline can also have a large impact on these cancellation effects.
For instance, in the case of a pipeline sitting to the left of the center-point
symmetric powerline shown in Figure 3-48, the pipeline is closest to Phase C of
the left circuit but is farthest from Phase C of the right circuit. Therefore, the field
created by the two Phase C conductors (as seen by the pipeline) would be less than
that in the case of the center-line symmetric powerline. An example of just how
significant a factor phase arrangement can be is shown in Figure 3-49. Note that
these curves have been calculated for a specific set of values for pipeline-topowerline separation distance d, conductor separation s, conductor height h, soil
resistivity ρ, and phase current I.
70
60
Centre
Line
50
|E| (V/km)
Partial
Roll
40
30
Full Roll
20
Centre
Point
10
0
0
1
2
3
4
5
6
7
8
9
10
d/s
Figure 3-49: Effect of Phase Arrangement on LEF Magnitude for Variation d/s Ratios
(for the specific case where ρ/s2= 1Ω/m, s/h = 0.3, and I = 1000A)
The curves in Figure 3-49 indicate that the center-line symmetric phase
arrangement results in the highest LEF magnitude, whereas the center-point
symmetric phase arrangement results in the lowest LEF magnitude. In some
extreme cases, there may be an order of magnitude difference between the LEFs
generated by these two different phase arrangements. This begs the question as to
why would all double-circuit vertical powerlines not be constructed using a centerpoint symmetric phase arrangement, particularly when the majority of utilities
appear to have adopted the center-line symmetric arrangement as their standard.
There does not appear to be a definitive answer to this question, other than that
“this is the way it has always been done”.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:49
Normally, a three-phase power transmission circuit is loaded so that the currents
carried by each of the three phases are approximately equal. Any significant
imbalance between these currents may reduce cancellation effects between the
fields and cause an increase in the LEF. The most extreme case of an imbalance,
of course, is a line-to-ground fault condition; however, this will be discussed in
Section 3.7.
Imbalances may also exist between two circuits of double-circuit powerline, which
can reduce cancellation effects and increase the LEF. The most extreme case
occurs under emergency conditions, when one circuit of a double-circuit powerline
is temporarily deactivated and its load is added to the load of the second circuit.
Two other factors having only a secondary impact on the magnitude of the LEF
are soil resistivity and the presence of shield wires. In general, as soil resistivity
increases the LEF generated along the pipeline will show a slight increase;
however, a resistivity increase has a much more significant effect on the
effectiveness of mitigation than on the LEF. When shield wires are introduced
onto a powerline, currents are induced in the shield wires. The shield wires will
then, according to Lenz’s Law (Section 3.1.2), have a magnetic field that opposes
any change in the primary magnetic field. In other words, the field generated by
the shield wire currents should lessen the overall field seen by the pipeline. This
theoretically should also apply to currents that are generated in other paralleling
structures, such as railway rails and foreign pipelines.
Although the discussion above has involved only factors that affect the magnitude
of the LEF, it is important to realize that all of these same factors also affect the
phase angle of the LEF. Phase angle is often just as important as magnitude in
determining a pipeline’s response to the field.
The determination of the magnitude and the phase angle of the LEF for a
particular pipeline-powerline corridor is a complex task that will be discussed in
more detail in Section 3.6.
3.3.2 Factors that Affect the Pipeline Voltages
In the case of a simple pipeline-powerline corridor, where the LEF is uniform
along the length of the pipeline (Figure 3-50), the location and magnitude of the
voltage peaks can be calculated once the LEF has been determined.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:50
Powerline
d
L
Figure 3-50: Simple Pipeline-Powerline Corridor (Plan View)
As Figure 3-41 shows, the voltage peaks for this system will be where the pipeline
stops paralleling the powerline—in this case, at the insulators. It is also known
that a zero voltage would occur at the midpoint of the pipeline. Assuming that this
pipeline is electrically short, the voltages at the insulators can be calculated using
Equation 3-25. The voltage profile for this ideal case is shown in Figure 3-51.
Note that polarity is once again being used to denote that the voltage peaks have
phase angles that are 180 degrees apart.
VO, L = ±
E ⋅L
[3-25]
2
V
E ⋅L
2
0
−
0
L/2
Distance
L
E ⋅L
2
Figure 3-51: AC Voltage Profile along an Electrically Short Pipeline
(Uniform Conditions – No Grounding)
The analogy of this simple pipeline-powerline problem, using the residential
electrical service, is shown in Figure 3-52. The voltage peaks that exist at the ends
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:51
of the secondary winding are of equal magnitude but opposite polarity (i.e., phase)
to one another, and the voltage at the midpoint is zero. In the case of the pipeline,
there is no ground connection at the center of the pipe that forces this point to zero
volts. However, because it is assumed that the pipeline has a uniform distributed
shunt impedance along its length, this is equivalent to lumping these impedances
into one shunt impedance at the midpoint. In contrast, if the electrical
characteristics of the pipeline are not uniform along its length, then the voltage
peak at one end of the pipeline may be higher than that predicted by Equation 325. The peak at the other end would be lower, and the zero crossing would have
shifted from the center of the pipeline (Figure 3-53).
4140 V
4140 V
120 V
120 V
-120
V
+120
V
Figure 3-52: Electrical Service Analogy for Pipeline-Powerline Corridor in Figure 3-50
V
E ⋅L
E ⋅L
2
0
0
−
L/2
Distance
L
E ⋅L
2
−E ⋅L
Figure 3-53: AC Voltage Profile Along an Electrically Short Pipeline
(Non-Uniform Conditions – No Grounding)
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:52
Consider once again the case of a residential electrical service, where the ground
connection is moved from the midpoint of the secondary winding to the end
(Figure 3-54). The voltage at the midpoint now becomes 120 V, whereas the
opposite end rises to 240 V because a voltage of 240 V must still exist from one
end of the winding to the other.
4140 V
4140 V
120 V
120 V
+120
V
+240
V
Figure 3-54: Effect of Grounding One End of Electrical Service Secondary
The situation described in Figure 3-54 also applies to a well-coated pipeline if one
end is connected to a low (near-zero)-resistance ground. The grounded end of the
pipeline is forced to zero volts; however, the voltage that has been induced from
one end of the pipeline to the other still exists. Hence the opposite end of the
pipeline rises to a voltage that is twice what it was previously (Figure 3-55).
Grounding is an effective means of mitigating induced AC interference, but this
example shows that grounding may actually increase pipeline voltages if it is
installed on the pipeline indiscriminately.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:53
V
E ⋅L
0
0
L/2
Distance
L
Figure 3-55: Effect of Grounding One End of Pipeline in Figure 3-50
If grounds are applied to both ends of the pipeline, or if grounds are uniformly
distributed along the pipeline, then all voltages can be mitigated to less than those
predicted by Equation 3-25—as Figure 3-56 shows.
V
E ⋅L
E ⋅L
2
0
−
0
L/2
Distance
L
E ⋅L
2
−E ⋅L
Figure 3-56: Effect of Grounding Both Ends of Pipeline or Adding Distributed Grounds
The installation of insulators will introduce additional voltage peaks on the
pipeline. On an electrically short pipeline, the installation of an insulator
essentially creates two electrically separate pipelines. Each pipeline has smaller
voltage peaks than the original pipeline because the voltages are proportional to
the physical lengths of each pipe section (Figure 3-57). An important
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:54
consideration in this case, is that even though the voltage peaks are now reduced, a
new voltage peak appears at the midpoint of the pipeline where previously the
voltage had been zero. Furthermore, because the voltage on one side of the
insulator is opposite in polarity (i.e., phase) to the voltage on the other side, the
voltage across the insulator is twice the voltage of the pipeline to ground.
V
E ⋅L
4
0
−
E ⋅L
4
0
L/2
L
Figure 3-57: Effect of an Insulator at the Midpoint of the Pipeline
It is important to note that the value ⏐E⏐⋅ L represents an absolute limit of the
maximum induced voltage that can appear on a pipeline, regardless of whether the
pipeline is electrically long or short or where the grounds and insulators are
installed. For example, if the field strength along the pipeline is 10 V/km under
maximum loading conditions and the pipeline parallels the powerline for 5 km,
then the maximum voltage that can appear on the pipeline is 50 V. However, it is
more likely that this voltage would be more evenly distributed—with
approximately 25 V appearing at each end and 0 V appearing near the pipeline’s
midpoint.
As the pipeline increases in length, voltages cannot continue to increase
proportionately and without limit as predicted by Equation 3-25; this stems from
the effects of attenuation. Furthermore, as the pipeline becomes more lossy, the
voltage profile becomes less linear (Figure 3-43). In order to calculate voltages on
an electrically long pipeline, the pipeline’s physical length in Equation 3-25 is
replaced by a parameter that may be thought of as being the pipeline’s electrical
length, l (2/Γ), resulting in Equation 3-26.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:55
VO, L = ±
E
[3-26]
Γ
The parameter Γ is known as the pipeline propagation constant. It is a constant
related to the electrical characteristics of the pipeline and is closely connected to
the pipeline’s AC attenuation constant. The value of Γ can be calculated, as
shown in Section 3.6.2; however, it is a complicated function of pipe depth, soil
resistivity, AC frequency, and coating resistance as well as pipe diameter, wall
thickness, and material. Alternatively, the value of Γ can be obtained from tables
or graphs. Figure 3-58 shows the AC voltage profile along a pipeline for the
simple pipeline-powerline geometry shown in Figure 3-50, where the pipeline is
electrically long or lossy.
V
E
Γ
0
−
0
L/2
Distance
L
E
Γ
Figure 3-58: AC Voltage Profile along an Electrically Long or Lossy Pipeline
(Uniform Conditions – No Grounding)
It was found in the case of an electrically short pipeline that grounding one end
could actually increase voltages at the opposite end. In the case of an electrically
long pipeline, however, grounding one end of the pipeline would have no effect on
the other end because the two points are electrically remote from one another
(Figure 3-59).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:56
V
E
Γ
0
−
0
L/2
Distance
L
E
Γ
Figure 3-59: AC Voltage Profile along an Electrically Long or Lossy Pipeline
(Zero Resistance Ground at Distance = 0)
As was previously mentioned, electrically long pipelines may exhibit zero voltages
over much of their length—provided that the electromagnetic field and the
electrical characteristics of the pipeline and the soil are uniform along this length.
If there was a change in any one of these parameters at some point along the
pipeline (referred to as an electrical discontinuity), an additional voltage peak
would be introduced at that point. Although the magnitude of this voltage peak
would depend on the nature of the discontinuity, it could possibly create an
additional peak of V = ⏐E⏐/Γ. This is an important aspect of electrically long
pipelines.
To better illustrate the difference between electrically long and electrically short
pipelines, consider the case of a pipeline several hundred kilometers long running
west across North America from the Atlantic coast. The pipeline is paralleled by a
powerline for the entire distance, and the electrical characteristics of the pipeline,
powerline, and the earth are uniform along the entire route. Because the pipeline
is electrically long, voltage peaks would be created at each end of the pipeline
having a voltage of V = ⏐E⏐/Γ. The majority of the pipeline, however, would
exhibit a zero voltage. Now consider what happens when the pipeline is extended
to the Pacific coast, again assuming that all conditions remain uniform along the
length of the pipeline. Even though the pipeline is now perhaps ten times longer,
voltage peaks still exist only at the two ends of the pipeline and the magnitude of
these voltage peaks remains limited to V = ⏐E⏐/Γ.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:57
The installation of insulators will also introduce additional voltage peaks on an
electrically long pipeline. However, if each of the newly created pipe sections
remain electrically long, then the insulators will have no effect on reducing the
magnitude of these voltage peaks (Figure 3-60)—as was the case with the
electrically short pipeline (Figure 3-57).
V
E
Γ
0
−
0
L/2
L
E
Γ
Figure 3-60: Effect of an Insulator at the Midpoint of an Electrically Long Pipeline
Also note this fact when installing an insulator on an electrically long pipeline: not
only are the voltage peaks not reduced, but the voltage that appears across the
insulator will now be double the maximum pipe-to-ground voltage appearing
anywhere else on the line. In other words, the voltage across the insulator is now
2⏐E⏐/Γ.
Therefore, as was the case with electrical grounds, do not
indiscriminately use electrical insulators on a pipeline affected by induced AC
interference because this could introduce new voltage peaks. It could also create
voltage differences twice as severe as those that could exist between the pipeline
and ground.
The determination of the LEF, and the calculation of pipeline voltages, will be
discussed in detail in Section 3.6
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:58
Experiment 3-3
To Further Investigate the Effects of Electromagnetic Induction
AC Power Line
VAC
Guy Rod
1
2
3
4
5
6
7
8
9
10
Coated Pipe Section
Experiment Schematic No. 1
Procedure
Note: This experiment is to be conducted on the buried section of coated pipeline at the
NACE field test site or be omitted. The experiment should be conducted by one
large group of students.
Step:
A. Using a high-impedance AC voltmeter (or digital multimeter, with ACV
selected), measure the AC voltage on each of the pipe test leads with
respect to a ground pin placed near the base of the test station (i.e., repeat
the measurements made in Step A of Experiment 3-2).
B. Ground the south end of the pipe by connecting a bond cable between the
electrical pole guy rod and a pipe test lead (see Schematic No. 1), and
repeat the measurements in Step A.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:59
C. Remove the ground connection to the guy rod, and observe the effects of
using other types of ground (e.g., pipe casing, sacrificial anode, foreign
pipeline).
D. Take two 50-foot spools of test lead wire and connect them together.
Unspool the wire until there is enough to extend from the first test station to
the last test station.
E. Suspend the wire in the air by tying it near the tops of the plastic test posts.
Ensure that the connection between the two spools is tied to the test post
closest to the middle of the pipeline and that the exposed portions of the
conductor are well-insulated from earth. Also suspend the spools from the
tops of the test stations (See Schematic No. 2).
F. Measure the AC voltage to each at both ends of the suspended wire and at
the exposed midpoint.
G. Ground one end of the wire using a ground pin (or screwdriver) and repeat
the measurements in Step F.
AC Power Line
Excess
Lead Wire
Test
Post
Test Lead
Wire
Experiment Schematic No.2
CP Interference Course Manual
© NACE International, 2006
January 2008
VAC
AC Interference
3:60
Results
AC Voltage (mV) at TS No.
Grounded to
1
2
3
4
5
6
7
8
9
10
Guy Rod
Anode
Bare Pipe
Condition
AC Voltage Measurement (V) on Suspended Wire
South End
Midpoint
North End
No Ground
Grounded
Questions for Discussion
1. How are pipeline voltages affected by grounding one end of the pipe? Is
this consistent with the theory discussed in class?
2. How do the voltages along the suspended wire compare with those induced
along the pipeline? Explain any significant difference between the general
appearance of the voltage profile or the magnitude of the voltages.
3. What effect does the installation of a small ground electrode have on the
voltages along the suspended wire? Can you think of any possible value
that these voltage measurements might have when conducting an induced
AC voltage investigation?
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3.4
3:61
Deleterious Effects of AC Interference
3.4.1 Electric Shock Hazards
There are two types of electrical shock hazards that may be encountered on a
pipeline affected by AC interference. The first is a short-duration shock resulting
from coincidental contact with the pipe at the same instant that a powerline fault
occurs. The second is a sustained shock resulting from contact with a steady-state
induced AC voltage.
The severity of a shock is dependent both upon current magnitude and duration.
Table 3-1 lists the effects of various shock current magnitudes (at 60 Hz) on the
human body.
Table 3-1: Effects of 60 Hz AC Body Currents on Humans1
Current (mA)
Physiological Effect
<1 .... No Sensation
1 to 8 .... Threshold of perception, painless
8 to 15 .... Painful, no loss of muscular control
15 to 20 .... Painful, loss of muscular control, can’t let go
20 to 50 .... Painful, severe muscular contractions, breathing difficulties
50 to 100 .... Ventricular fibrillation possible
100 to 200 .... Fibrillation certain, death results without defibrillation
>200 .... Severe burns, severe muscular contractions
Small electrical shocks can be a nuisance and can potentially cause an involuntary
movement that may cause an accident. However, the smallest shock of
significance is the current at which a person loses voluntary muscular control and
cannot let go of an energized object. The maximum current at which a person can
still let go is known as the let-go current. This is considered the maximum safe
body current for sustained shocks because a person can withstand repeated
exposures to their let-go current without serious after-effects.
1
NACE Recommended Practice RP0177-2000 – “Mitigation of Alternating Current and Lightning Effects
on Metallic Structures and Corrosion Control Systems” as referenced in Accident Prevention Manual For
Industrial Operations – National Safety Council. W.B. Kouwehoven, Ph.D., “Treatment of Electric
Show” In Low Voltage Shock Hazards, The Johns Hopkins University, (June, 1962).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:62
As current increases beyond the let-go current, shocks become increasingly painful
and more dangerous to the body. The most serious shock hazard occurs when
currents are capable of causing ventricular fibrillation. When ventricular
fibrillation occurs, the electrical signals to the heart become disrupted and the
heart stops pumping. Under these circumstances, the heart almost never starts
pumping again on its own and death can only be prevented by administering
cardiopulmonary resuscitation (CPR) until defibrillation can be applied. A
defibrillator uses a strong pulse of DC to put the entire heart into contraction, after
which the heart might be restored to its rhythmic pattern.
Beginning in the 1930s, studies have been conducted to determine the
physiological effects of shock current magnitude and duration. Because it would
obviously not be possible to study the effects of excessive currents on human
subjects, experiments were conducted on a variety of different animals. Attempts
were made to project these results to humans. In the 1960s, Charles Dalziel
analyzed this data, and correlated fibrillation currents with body weight (Figure 361). Among his conclusions were that the fibrillation current increases linearly
with body weight, regardless of the animal species, and that it also increases with
the inverse square root of shock duration.
400
11 CALVES
300
IAVG (DOGS)
25 SHEEP
IAVG (4 SPECIES)
3 PIGS
200
0.5% MINIMUM
FIBRILLATING
CURRENT
107 mA
100
0
0
0.5% MAXIMUM
91 mA NONFIBRILLATING
CURRENT
67 mA
20
40
60
80
100
120
BODY WEIGHT - kg
Figure 3-61: Fibrillating Current versus Body Weight
(Various animals – 3 second shock duration)
These conclusions led to the following equations for the maximum tolerable body
currents for humans—that is, the body currents above which would result in
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:63
ventricular fibrillation. These equations remain in use today as the basis for
designing safe electrical grounding systems.
IB =
IB =
0.157
ts
0.116
ts
(70 kg body)
[3-27]
(50 kg body)
[3-28]
Dalziel also conducted additional experiments at low currents on human
volunteers. He observed the following information on let-go currents.
Table 3-2: Let-Go Currents from Dalziel’s Experiments2
Let-Go Current (mA)
Threshold
Average
Women
6
10.5
Men
9
16
Dalziel also examined the effect of AC frequency on let-go currents. He found that
typical power frequencies (i.e., 25 Hz to 60 Hz) happen to be the most severe, as
Table 3-3 shows.
2
Charles F. Dalziel and W.R. Lee, “Lethal Electric Currents”, IEEE Spectrum, Vol. 6, No. 2, Feb. 1969,
p.45.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:64
Table 3-3: Let-Go Currents from Dalziel’s Experiments3
Median Let-Go Current (mA)
Frequency
(Hz)
Adult
Males
Adult
Females
Children
0
76.1
50.3
38.0
5
25.5
16.9
12.7
10
17.3
11.4
8.6
25
15.9
10.5
7.9
60
15.9
10.5
7.9
180
18.3
12.1
9.1
500
19.3
12.8
9.6
1000
24.2
16.0
12.1
2500
35.2
23.3
17.6
5000
51.6
34.1
25.8
10000
74.8
49.5
37.4
A shock current may pass through the body using a number of different paths, the
most common of which appear in Figure 3-62.
Hand-to-Hand
Hand-to-Feet
Foot-to-Foot
Figure 3-62: Possible Body Current Paths
An electric shock can occur when a person touches an energized structure, or even
when a person is simply standing in the vicinity of an energized structure that is in
contact with the earth. As an example, the structure in Figure 3-63 has become
energized to a voltage of 10 kV. The fault current IF passes from the structure to
the earth, creating a voltage gradient. A person touching the structure will be
exposed to a voltage of 2 kV because this is the potential difference between the
structure and the point on the earth where the person is standing. A shock current
3
Charles F. Dalziel et al., “Effect of Frequency on Let-Go Currents”, AIEE Trans. Vol. 62, Dec. 1943,
pp745-750.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:65
will pass from the hand, through the body, and to the two feet. The voltage to
which the person is exposed in this case is known as the touch potential. It is
defined as the potential difference between a grounded metallic structure and a
point on the earth’s surface separated by a distance equal to the normal maximum
horizontal reach (approximately 1 m).
IF
Touch Potential = 2 kV
Step Potential = 1 kV
10 kV
9 kV
8 kV
7 kV
Figure 3-63: Example of Typical Touch and Step Potentials at an Energized Structure
A second person, who is not touching the structure, is exposed to a voltage of 1 kV
because this is the potential difference between the two points on the earth where
the person is standing. The shock current will pass from one foot, through the
body, and to the other foot. This voltage is known as the step potential. It is
defined as the potential difference between two points on the earth’s surface,
separated by a distance of one pace (approximately 1 m), in the direction of
maximum voltage gradient.
The hand-to-hand current path can occur when two structures that can be
simultaneously touched are energized to different potentials—such as across an
aboveground insulator. It can also occur when one hand is touching an energized
structure and the other hand is touching a structure such as a remotely grounded
conductor, which is transferring the potential of remote earth (i.e., zero volts) to
the site where the person is standing. This is generally referred to as transferred
potential. The hand-to-hand path is typically regarded as the most serious
situation because it places the heart directly in the current path.
Although equations 3-27 and 3-28 provide the maximum body currents that a
person can tolerate, they do not give the maximum tolerable touch and step
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:66
potentials. In order to derive this, one must know the resistance of the current path
through the body.
It is estimated that the resistance of the internal body tissues is 300 Ω and that the
resistance of the body, including the skin, is between 500 Ω and 3000 Ω. A value
of 1000 Ω is therefore taken as a body’s approximate resistance, regardless of the
current path. In addition to this resistance, one must consider the contact
resistance between the feet and the soil.
Approximating the human foot as a circular plate having a diameter D, on the
surface of soil having a resistivity ρ, the resistance of the foot is calculated as:
R =
ρ
2D
[3-29]
For a foot having a diameter of 6.5 in (16.7 cm), the foot would have a resistance
of 3ρ, where ρ is given in Ω-m. Therefore, the resistance of two feet in parallel,
R2Fp (in the case of a touch potential), or two feet in series, R2Fs (in the case of a
step potential), can be calculated as:
R2Fp = 1.5ρ
[3-30]
R2Fs = 6ρ
[3-31]
The tolerable limits for touch and step potential can now be calculated using
Ohm’s Law:
V = R×I
[3-32]
V = ( Rbody + Rfeet) × Ibody
[3-33]
Therefore, for a person weighing 50 kg
Vstep50 = (1000 + 6ρ)
0.116
Vtouch50 = (1000 + 1.5ρ)
CP Interference Course Manual
© NACE International, 2006
January 2008
tS
0.116
tS
[3-34]
[3-35]
AC Interference
3:67
And a person weighing 70 kg
Vstep70 = (1000 + 6ρ)
0.157
tS
Vtouch70 = (1000 + 1.5ρ)
0.157
tS
[3-36]
[3-37]
Note that these calculations do not assume any additional resistance that might be
contributed by footwear. Also, consider all possible body current paths to be of
equal detriment.
Example Calculation:
Calculate the maximum tolerable touch and step potentials for a 70-kg man
standing on 100 Ω-m soil, exposed to a fault having a 0.1-s duration.
Vstep70 = (1000 + 6ρ)
Vstep70 = (1000 + 6 ⋅ 100)
0.157
tS
0.157
= 794V
0 .1
Vtouch70 = (1000 + 1.5ρ)
Vtouch70 = (1000 + 1.5 ⋅ 100)
0.157
tS
0.157
= 571V
0 .1
Because the probability of a fault is low and the duration of a fault is very short
(typically <0.1s), the probability of contacting the pipeline or an appurtenance
at the moment a fault occurs is very low. Therefore, systems that are designed
to protect the safety of personnel in the event of a fault are designed with the
goal of preserving life; designing with a higher goal, such as preventing a
painful shock, is not easily justifiable.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:68
In the case of an induced steady-state voltage that is always present on the
pipe, the mitigation system must be designed so that contact with the voltage
will, hopefully, not prevent a person from letting go and will definitely not
cause breathing difficulties. A value of 15 mA has been chosen as the
maximum sustainable body current. Assuming a minimum body resistance of
1000 Ω, the maximum steady-state AC voltage is determined by Ohm’s Law
as:
Vss = Iss × Rbody
[3-38a]
= 15mA × 1000Ω = 15 V
This 15-V limit for steady-state induced AC pipeline voltages has been adopted
by various standards, including NACE RP0177 and the Canadian Standards
Association’s CSA C22.3 No.6. Some sources note that the value of 15 V
actually comes from a maximum sustainable body current of 10 mA and an
assumed body resistance of 1500 Ω; however, the end result is the same. Also
remember that, even though 15V is a well-recognized safe limit, there are cases
where even 15 V would be considered excessive—such as where small
children could reasonably be expected to come in contact with this voltage.
3.4.2 AC Corrosion
3.4.2.1
Theory
Corrosion of steel by alternating current was investigated as far back as the early
1900s. A comprehensive study by the U.S. Bureau of Standards,[4] concludes that
AC corrosion decreases with increasing frequency, does not occur beyond a
limiting frequency between 15 and 60 Hz, and results from irreversibility—during
the negative half cycle—of the corrosion that occurs during the positive half cycle.
Their results, for iron electrodes exposed to normal soils at various frequencies,
appear in Figure 3-64a. Hence, the amount of corrosion is expressed as a
“coefficient” percentage of the amount of corrosion that would be caused by an
equivalent amount of DC. All electrodes were operated at an AC current density
of 5 A/m2. At 60 Hz, the coefficient was less than 1 percent under natural soil
considerations.
4
B. McCollum and G.H. Ahlborn, Technological Papers of the Bureau of Standards, No. 72 Influence of
Frequency of Alternating or Infrequently Reversed Current on Electrolytic Corrosion, Washington, DC,
Aug. 1916.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:69
100
90
80
70
LEGEND:
Soil
Soil + Na2 CO3
60
50
40
30
20
10
0
-10
1/60S 1/15S
1S
5S
1M 5M 10M 1Hr.
2Days 2Weeks
D.C.
Logarithm of Length of Time of One Cycle
Figure 3-64a: Coefficient of Corrosion at Different Frequencies for Iron Electrode
Denoted as Average Electrode Loss
(McCollum and Ahlborn, 1916)
A number of investigators examined the effects of AC on cathodically protected
steel. Nearly all of them agreed that AC corrosion could be overcome with CP.
Bruckner (1964) observed that CP reduced AC corrosion to negligible values, but
the DC current density of 0.42 to 0.53 A/m2 was considered much greater than
appears necessary in practice. Hewes (1969) stated that in the corrosion rate,
being in the order of 0.1% of an equivalent magnitude DC, is readily overcome by
normal cathodic protection procedures. Even much more recently, Hamilin
(1986) concluded that metals under the influence of AC can be cathodically
protected, but usually at higher current densities.
Then, in Germany, two corrosion perforations occurred on a polyethylene-coated
gas pipeline that was installed in 1980 parallel to an AC (16-2/3 Hz)-powered rail
transit system. A subsequent investigation, as reported by Prinz, attributed the
corrosion to induced AC arising from the transit system operation. At the
corrosion sites the polarized potential from the CP system was
–1000 mVcse and the corrosion product pH was 10. These figures indicate that the
CP system was operating adequately with respect to current industry standards. A
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:70
potential gradient survey indicated additional coating holidays. Upon excavation,
the holidays revealed “crater-like” corrosion pits underneath corrosion product
“bulges” that had not been observed before but whose appearance was apparently
consistent with similar observations on other pipelines in Germany and
Switzerland. The relatively low soil resistivity of 1900 Ω-cm was a result of deicing salt contamination. A steel rod coupon having a holiday surface area of 1
cm2 was installed and monitored for a period of 220 days before removal for
examination. Despite a CP current density of 1.5 to 2 A/m2 and a resulting “ON”
potential of –1800 to –2000 mVcse, the coupon exhibited pitting corrosion at a rate
of 210 mpy caused by an AC current density that varied from 20 to 220 A/m2.
Funk conducted laboratory tests using 10-cm2 coupons in synthetic soil solutions
subjected to AC current densities of 100 and 50 A/m2 and field tests using coupons
in both sandy and clay soils at AC current densities of 10 to 30 A/m2 and 300 to
1000 A/m2, respectively. A test coupon was perforated after 168 days at an AC
current density of 100 A/m2, and corrosion rates greater than 42 mpy (1 mm/a)
were observed. After these preliminary results, additional testing to better define
the influence of current density was carried out. The testing indicated that AC
current densities greater than 30A/m2 caused corrosion rates greater than 4 mpy
(0.l mm/a) at a constant CP current density of 2 A/m2. The corrosion rates
increased with increased AC current density but decreased with time.
Helm conducted short-term tests (up to 1000 hours) and long-term tests (up to 1
year) in flowing and stagnant waters while varying the AC and DC current density
in an attempt to establish an effective corrosion control criterion for pipelines
exposed to AC. They concluded that, with up to 20 A/m2 of AC, there is “probably
no risk” of accelerated corrosion using the conventional criteria. They found that
corrosion is possible between 20 and 100 A/m2 because the conventional criteria
are unreliable. Moreover, they noted that corrosion damage is to be expected when
AC current densities exceed 100 A/m2.
Gustav Peez reported corrosion rates of up to 55 mpy (1.3mm/a) at current
densities from 100 to 200 A/m2. In addition, field inspections on the Erdgas
Sudbayem (ESB) gas pipeline system indicated that corrosive attacks—starting at
an AC current density of 15 A/m2—could not be ignored.
Field inspections carried out by Hartmann at identified coating holidays on the
30.8-km Hunze-Hambom gas pipeline revealed corrosion pits after 2½ years in
operation of 42 mils (1 mm) in 20,000 Ω-cm sandy soil at AC current densities of
74 to 165 A/m2, which is an average corrosion rate of approximately 17 mpy.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:71
Increasing the CP current density from 2A/m2 to 5A/m2, as determined by Funk,
decreased the AC corrosion rate at an AC current density of 50A/m2 by at least
one half. Using results on test specimens in flowing waters, Helm found that CP
current densities up to 0.25 A/m2 had no mitigating effect. However, he did
observe a demonstrable benefit at 4 A/m2.
Helm also found no detectable difference between 16 2/3 Hz and 50 Hz in flowing
water at an AC current density of 10 to 20 A/m2 and a DC current density of 0.2
A/m2. Helm’s conclusion is similar to McCollum and Ahlborn’s findings (Figure
3-64), which show no significant difference in corrosion coefficient between 15
and 60 Hz.
AC corrosion rates appear to be dependent on the type of environment. Both Prinz
and Helm indicate that the presence of sodium bicarbonate (NaHCO3) and calcium
carbonate (CaCO3) increases corrosion whereas sodium chloride (NaCl)containing media seem to inhibit corrosion. This accelerating effect of carbonates
was also apparent at 60Hz in the McCollum and Ahlborn study.
Flowing water produced a higher corrosion rate than stagnant water of the same
composition according to Helm. This was ascribed to the enhanced supply of Ca++
and HCO3– ions to the surface. Tests on low-alloy steel specimens in 0.1 N NaCl
solutions by Jones indicated that the corrosion rate compared to the control, at an
AC current density of 300A/m2, was unaffected in aerated conditions but increased
by a factor of five in the deaerated conditions. Bertocci also demonstrated, based
on polarization theory, that when the cathode is under diffusion control—such as
what one might expect in aerated conditions—corrosion acceleration would be
minimized. Bruckner deduced that the AC corrosion rate in deaerated conditions
was greater than for aerated conditions, although he was unable to explain this
result. Frazier and Barlo found that corrosion rates on steel coupons at AC current
densities in the order of 1000A/m2 varied substantially in two different simulated
groundwaters as well as when the groundwater was deaerated. AC had a greater
corrosion accelerating effect in a clay soil as compared to mineral waters,
according to Pookote and Chin.
Figure 3-64b clearly indicates that the corrosion rate decreases with time
regardless of the AC current density. Williams’ corrosion studies, conducted in the
absence of CP, also verified that the AC corrosion rate decreases asymptotically
with increased time. Prinz, however, reported that there was an “incubation” time
of 30 and 120 days for AC current densities of 100 and 50A/m2, respectively, after
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:72
which the corrosion rate increased; but, this has not been reported elsewhere.
Furthermore, these short time test periods would not have any significant relation
to a pipeline in the long term.
0.50
iac = 100 A/m2
sheet metal specimens
pipe specimens
0.40
iac = 50 A/m2
0.30
iac = 30 A/m2
0.20
0.10
0.00
0
1
2
3
4
5
6
7
8
9
10
11
12
Time / 103 (hr.)
Figure 3-64b: Maximum Penetration Depth as a Function of Test Duration at
Constant Cathode DC Current Density (2A/m2) and
Differing AC Current Density (Funk et al., 1992)
Another time factor is the general increase in resistance with time and a
consequent decrease in AC current density as reported by two investigators
(Williams; Bruckner) when a constant AC voltage is applied. Because this type of
AC situation closely simulates actual field conditions, it implies that lower
corrosion rates are to be expected in practice as time increases.
The surface area of the pipe at a coating holiday should be important because the
corrosion rate increases with increasing current density and, hence, large holidays
would therefore have a lower current density than smaller holidays if both are
exposed to the same soil conditions. In this regard Peez reported on observations
made at a number of holiday sites on the Erdgas Sudbayem system. The
observations indicated that the majority of the corrosion occurred at holidays
having approximately l cm2 surface area. A second paper (Heim and Peez), based
on the same investigation, reported that no corrosion activity was observed at
small holidays of 0.01 cm2 and only minimum corrosion at one of two sites having
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:73
a holiday area of 0.03 cm2. The lack of corrosion attack at the smaller holidays
was attributed to obstruction of these relatively small openings.
Prinz recounted that, when coupons having surface areas ranging from 0.5 cm2 to
5 cm2 were buried next to an AC-affected pipeline, the highest corrosion rate
occurred on the 1-cm2 coupon.
Unfortunately, the existing literature does not definitively describe the actual AC
corrosion mechanism. McCollum and Ahlborn generally reasoned that AC
corrosion resulted from the irreversibility of the corrosion reaction such that metal
ions created during the anodic half cycle were not re-plated during the negative
half cycle. Although this was equated to a rectification effect, Williams concluded
that the corrosion mechanism was not rectification but rather a sole result of the
positive half cycle. Bruckner thought that the observed AC corrosion may have
been partially a result of “thermal activation,” although Pookote and Chin—who
attempted to investigate the influence of temperature on the rate of corrosion—
were unable to draw a firm conclusion because of scattered data.
Bertocci explained the relatively low corrosion efficiency of AC compared to DC
by demonstrating that the majority of the sine function AC and higher-frequency
harmonics are shunted by the double-layer capacitance “without causing material
transport across the electrode interface.” He also showed this effect could be
particularly pronounced under diffusion-controlled (i.e., aerated) conditions.
Jones, in explaining why there was greater corrosion acceleration on steel in
deaerated rather than aerated environments, demonstrated that superimposed AC
caused depolarization of the anodic reaction. He inferred that this could be caused
by anion desorption or surface film reduction during the cathodic half cycle.
Similarly, Chin and Fu were able to show a breakdown in anodic passivity with
increasing 60Hz current density by using anodic polarization tests on mild steel
electrodes in a pH 7, 0.5M sodium sulfate (Na2SO4) solution.
Hamlin concluded, however, that “AC does not have any significant effect on the
polarization or depolarization of cathodically protected steel⎯”. In contrast,
Lalvani and Lin were able to show that the corrosion characteristics can be
classified in terms of the ratio of the anodic and cathodic Tafel slopes by
generating a number of potentiodynamic polarization curves.
The extreme complexity of determining all the variables influencing AC corrosion
is apparent in the literature, and several investigators emphasized the need for
additional research.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:74
More recently, it has been found that excessive amounts of CP can actually
increase AC corrosion rates. In laboratory experiments conducted by Neilsen[5], it
has been found that very electronegative CP potentials (e.g., -2200 mV on w.r.t.
CSE) resulted in increased AC current densities and increased AC corrosion rates
(figures 3-65a and 3-65b, respectively). This has been attributed to the lowering
of the electrolyte resistivity immediately adjacent to the site of the holiday, which
coincides with the high pH resulting from the increased level of CP.
Figure 3-65a: Effect of CP Potential on AC Corrosion Rate
5
L.V. Neilsen, "Role of Alkalization in AC Induced Corrosion of Pipelines and Consequences Hereof in
Relation to CP Requirements." Paper 05188, NACE 2005, Houston, TX.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:75
Figure 3-65b: Effect of CP Potential on AC Current Density
It has also been recently reported that the effect of the ionic composition of the
soil, as discussed earlier, may influence the AC resistance of the holiday—and,
therefore, the AC current density[6]. If earth alkaline ions such as Ca2+ and Mg2+
are present in the soil, CP will result in the formation of calcareous deposits at the
holiday site that can increase the holiday resistance by a factor of 100. In contrast,
if alkaline ions such as Na+, K+, and Li+ are present, this may result in the
formation of highly soluble hydroxides that can lower the resistance of the holiday
by a factor of 60 times. The ratio of alkali ions to earth alkali ions can therefore
result in a range of holiday resistances spanning three orders of magnitude.
At the time of this writing, the one factor whose importance cannot be disputed is
the effect of AC current density. AC current density can be calculated for a
circular holiday, by combining the formulae for the resistance and surface area of
a circular disk with Ohm’s Law, as follows:
iAC =
6
8VAC
ρπd
[3-38b]
Technical Specification - Corrigendum to EN12954, "Evaluation of AC Corrosion Likelihood of Buried
Pipelines - Application to Cathodically Protected Pipelines." Comité Européen de Normalisation, TC219
- WG 1 - Ad Hoc Group 4, Dec. 2004.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:76
where:
iAC
VAC
ρ
d
=
=
=
=
AC current density (A/m2)
pipe AC voltage to remote earth (V)
soil resistivity (ohm-m)
diameter of a circular
This equation can then be used in conjunction with the conclusions of the German
investigators (Prinz; Funk, et al.; Helm, et al.; Peez; Hartmann), which were as
follows:
• At AC current densities of less than 20 A/m2 there is no AC induced
corrosion, and
• AC corrosion is unpredictable at AC current densities of between 20 A/m2
and 100A/ m2, and
• At AC current densities of greater than 100A/ m2, corrosion is to be
expected, and that
• The highest corrosion rates are found at holidays having a surface area in
the range of 1 to 3 cm2.
The magnitude of the AC current densities may at first seem unusually high; but,
in low-resistivity soils, relatively low AC voltages can produce high current
densities when the surface area of the coating holiday is small. For example, the
AC voltage required to produce a current density of 100 A/m2 in 1000 Ω-cm soil at
a 1 cm2 holiday (d = 0.011 m), would be:
VAC =
iAC ρπd 100 ⋅10 ⋅ π ⋅ 0.011
=
= 4.4V
8
8
It is clear from the foregoing calculation that cathodically protected pipelines
subjected to AC voltages—that are below the maximum safe operating level of 15
V—can suffer from AC corrosion at holiday sites having a surface area of
approximately 1 cm2 in a soil resistivity of 3000 Ω-cm or less.
3.4.2.2
AC Corrosion Case Histories
Several selected AC corrosion case histories that have been reported in the
literature follow.[7, 8]
7
R. Wakelin, R. Gummow, S. Segal, “AC Corrosion – Case Histories, Test Procedures, and Mitigation.”
Paper 565, NACE 1998, San Diego, CA.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:77
Case History No. 1
In 1991, after only four years of operation, a corrosion failure occurred on a 300mm diameter high pressure gas pipeline in Ontario, Canada. The pipeline was
coated with a double-layer of extruded polyethylene (PE), and its joints were fieldcoated with a hot-applied coal tar tape. The pipeline was cathodically protected
using distributed magnesium anodes. It exhibited on potentials ranging from -1.45
VCSE to -1.50 VCSE.
A high-voltage AC power line 14 m away from the pipeline paralleled the
pipeline’s entire 4400-m length. Induced AC voltages had been mitigated by
coupling the pipeline through capacitors to the station piping at each end of the
pipeline and to ground rods installed at the test stations. Voltages typically ranged
from 6 V to 10 V, but they often rose to 26 V when capacitors failed. At the time
the failure was being investigated, the AC voltage was 28 V.
The leak occurred at a joint under the center of a four-lane roadway. A 50-mmdiameter pit cluster was found immediately adjacent to the weld at the eighto’clock position, within which a pinhole perforation was found (Figure 3-65c).
Figure 3-65c: Pit Cluster and Pinhole Perforation (Case History No. 1)
8
R. Wakelin, C. Sheldon, “Investigation and Mitigation of AC Corrosion on a 300 mm Diameter Natural
Gas Pipeline.” Paper 4205, NACE 2004, New Orleans, LA.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:78
Based on a nominal pipe wall thickness of 5.56 mm, the penetration rate of this pit
was calculated to be 1.4 mm/y (55 mils/y). A second pit cluster discovered
adjacent to the weld at the four-o’clock position, was similar in appearance and
slightly larger in size but did not penetrate the pipe wall.
The section of pipeline crossing the roadway had been fabricated from two lengths
of pipe that were welded together above grade. The joint was coated before the
pipe was installed through an open cut in the road. Although the crew that
repaired the leak had noted that the coating was intact except at the leak site itself,
the location and symmetrical appearance of the two pit clusters suggest that the
coating had indeed been damaged during installation—perhaps by the pipeline
boom grip used to lower the pipe into the trench.
The soil at the failure site was a dark brown sandy clay having a pH of 8.8, an
electrical resistivity of 130 Ω-cm, and a chloride ion concentration of 3600 ppm.
Because the pipeline crosses the roadway on a hill, the high-chloride ion
concentration was no doubt caused by the frequent application of de-icing salts.
The soil on either side of the roadway exhibited lower chloride ion concentrations
(50 ppm to 500 ppm) and correspondingly higher resistivities (1000 Ω-cm to 4800
Ω-cm). An inspection of the pipe joints at each side of the roadway found no
evidence of corrosion damage—even though the joint coating had been poorly
applied, resulting in the ingress of moisture between the pipe and coating.
The cause of the corrosion could not be identified because the failure site had been
disturbed by the emergency repair crew prior to the investigation. It was
originally speculated that the failure could have been the result of an occluded cell
(because of the high chloride ion concentrations in the soil) or that bacterial
corrosion could have been responsible (because sulfides were found in the
corrosion products). In retrospect, it is more likely that the corrosion was ACinduced—a result of the extremely high AC current density calculated for the pit
site. Using Equation 3-38b, the AC current density at the pit was calculated to be
1100 A/m2. This current density is based on a voltage of 28 V, a soil resistivity of
130 Ω-cm, and an assumed holiday diameter equal to the pit diameter of 50 mm.
It is well in excess of the 100-A/m2 threshold above which AC corrosion is
expected to occur.
Case History No. 2
A 250-mm-diameter oil products pipeline, coated with extruded PE, was installed
in 1976. It was cathodically protected by a jointly operated impressed current
system serving a number of pipelines that shared the power line corridor across the
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:79
north end of Toronto, Ontario.
An internal inspection tool passed through the piping in 1986 identified a minor
anomaly (much less than 25% wall penetration). A subsequent internal inspection
in 1994 indicated a significant anomaly at this same location. Upon excavating
and examining the pipeline, a crater-like corrosion pit was found. The pit was 50
mm long by 45 mm wide by 6.9 mm deep. It penetrated through 88% of the pipe’s
7.8-mm-thick wall. Assuming that the pit grew from 25% to 88% penetration over
the eight years between internal inspections, this translates to an average corrosion
rate of 0.61 mm/y (24 mils/y).
Pipe-to-soil potentials more electronegative than -1.27 VCSE on had been recorded
in the vicinity of this corrosion site during previous surveys, thus indicating a
satisfactory level of protection. Moreover, the potential with the reference
electrode located at the pit was -1.18 VCSE compared to -1.47 VCSE on with the
electrode located at grade level. The soil adjacent to the pit exhibited an electrical
resistivity of 300 Ω-cm, a chloride ion concentration of 1920 ppm, and tested
negative for sulfides. The high chloride concentration was attributed to the
application of de-icing salts because this corrosion anomaly was located under the
edge of the roadway. The reddish brown corrosion product tested negative for
sulfate-reducing bacteria and had a pH of 10.7, compared to a pH of 8.0 for the
bulk soil.
The induced AC voltage at this location was 15 V at the time of this investigation;
it was 12 V during the previous year’s CP survey. Using Equation 3-38b, the AC
current density was calculated to be 200 A/ m2 at 12 V—well above the 100-A/ m2
threshold value. Except for the possibility that this was an occluded corrosion cell,
the cause of corrosion was concluded to be induced AC current.
Case History No. 3
A 500-mm-diameter, 74-km-long, coal tar-coated high-pressure natural gas
pipeline was paralleled for 40 km by a high-voltage AC power line. In 1995, an
internal inspection identified a number of anomalies—all of which were located
along the power line right-of-way. Defects estimated to have a corrosion depth of
greater than 40% of the 7.1-mm wall thickness were concentrated along two
discrete pipe sections. Two of these anomalies located were estimated to penetrate
80% and 63% of the pipe wall, respectively.
A review of pipe-to-soil potential data collected during test station surveys and
close-interval surveys since the pipe’s installation in 1972 indicated no evidence of
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:80
subcriterion potentials along this pipeline. Rectifier data for the influencing
impressed current systems indicated that there were only 10 days of downtime
since 1983, all occurring in 1994 while an AC mitigation system consisting of
banked magnesium anodes was being installed.
At the first dig site, three corrosion anomalies were investigated. The deepest was
a smooth and generally round corrosion pit, having a diameter of 5 cm and a
maximum depth of 6.1 mm (86% of the wall thickness). The adjacent soil was
moist clay having a resistivity of 2000 Ω-cm. A hard, tightly adhering tubercle
protruding 5 cm above the pipe’s surface covered the pit. The coating around the
pit was disbonded over a 20-cm radius. A pH test using litmus paper indicated
that the pH was greater than 8.5 at this pit, as well as at two smaller pits examined
in the vicinity. Furthermore, there was no evidence of bacterial corrosion and the
local CP potential was -1.56 VCSE on. Accordingly, there was no apparent cause
for the observed corrosion. The AC current density at this site was calculated to
be 84 A/ m2 at 33 V, which was the average induced AC voltage prior to the
installation of the AC mitigation system in 1994.
At the second dig site, three additional anomalies were investigated. The deepest
of these was found at the two-o’clock position beneath a large hemispherical shell
of extremely hard soil, approximately 15 cm thick (Figure 3-65d). The pit was 56
mm in diameter by 6.34 mm in depth (89.3% penetration) and was smooth and
dish-shaped. A 25-mm-diameter steel pipe was found to be wedged against the
pipe at the pit. The pH of the soil immediately adjacent to the pit was 8.2, the soil
resistivity of the moist clay soil was 1350 Ω-cm, and only trace amounts of
chlorides and sulfides were found. The pipe-to-soil potential with the reference
electrode located on top of the corrosion product was -1.05 VCSE, compared to
-1.49 VCSE on with the reference at grade.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:81
Figure 3-65d: Hemispherical Shell of Hardened Soil Surrounding Anomaly (Case History No. 3)
Although the small steel pipe, if in contact with the pipeline steel, would
electronically shield the pit from receiving CP current, it is likely that the electrical
contact was broken as corrosion progressed—thereby eliminating any shielding
effect. In such a case, however, the small pipe would serve to focus both CP
current and AC current at the pit location because of its low resistivity compared
to that of the surrounding soil. The pipe-to-soil potential suggests that the pit did
not lack for CP current. Furthermore, the possibility of bacterial corrosion was
dismissed because the CP level was more electronegative than the -0.95 VCSE
criterion generally considered sufficient to prevent corrosion from sulfate-reducing
bacteria.
The other anomalies investigated at the second dig site were both similar in
appearance to the first. Both were smooth, round, and dish-shaped, and both were
initially covered in a hemispherical shell of hardened soil. One of these actually
consisted of two pits located immediately beside one another (Figure 3-65e).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:82
Figure 3-65e: Hemisphere of Hardened Soil and Corrosion Pit (Case History No. 3)
Before the distributed AC mitigation system was installed on this pipeline in 1994,
the AC voltage at the second dig site was approximately 25 V, resulting in a
calculated AC current density of 84 A/ m2. This is identical to the AC current
density calculated for the deepest pit at the first dig site; coincidentally, the
corrosion rates were nearly identical (0.27 and 0.29 mm/y). Accordingly, it was
concluded that the observed corrosion at both dig sites was AC-induced.
Case History No. 4
A 20-km-long, 300-mm-diameter pipeline coated with side-extruded PE and
cathodically protected by banks of magnesium anodes was installed in New York
State in 1991. In its eleventh year of service, the pipeline experienced a corrosion
failure close to a weld at the seven-o’clock position on the pipe (corrosion rate of
24 mils/year). A pinhole perforation occurred near the center of a smooth, round,
dish-shaped pit that was approximately 25 mm in diameter (3-65f). The failure
was attributed to corrosion, although CP records for a test station located only a
few meters from the failure site suggest that the pipeline had been well-protected
from the time it was constructed (potentials more electronegative than -1.3 VCSE
on). Furthermore, there was no evidence to suggest that the failure site had been
shielded from receiving protective current.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:83
Figure 3-65f: Pinhole Corrosion Failure Following Removal of Repair Clamp (Case History No. 4)
The failure occurred in a rural area on the south side of a paved two-lane roadway
where the pipeline diverges from a major electric powerline . The pipeline is
paralleled by four single-circuit 345-kV powerlines for 5300 m and a doublecircuit 115-kV power line for 9400 m (Figure 3-65g).
A study conducted at the time of construction indicated that peak voltages could
reach 300 V where the pipeline entered and exited the 345 kV corridor; as a result,
magnesium anode beds were installed at critical locations. Despite these
measures, AC voltages along the pipeline remained high—with peak pipeline
voltages of 50 V and 80 V at the south and north ends of the shared 345-kV
corridor, respectively. These locations are referred to throughout the paper as sites
A and B, respectively, where Site A is also the site of the failure.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:84
4 - 345 kV Single
Horizontal Circuits
Oswego
B
9400 m
A
5300 m
5300 m
115kV Double
Vertical Circuit
North
Volney
Figure 3-65g: Pipeline-Powerline Route (Case History No. 4)
One month after the failure occurred, a site visit was made to collect additional
data and to attempt to find other corrosion sites where the corrosion mechanism
might be identified.
Although a large magnesium anode was located immediately adjacent to the
failure, the anode bed was found to be disconnected from the pipeline at its test
station. It was later discovered that the anode bed had been disconnected two
years before the failure; this was evident because the open-circuit potential of the
anodes (-1.30 VCSE) was slightly less electronegative than the pipe’s on potential
(-1.35 VCSE) and the anodes were receiving rather than contributing CP current.
The anode bed was temporarily reconnected to the pipe, resulting in a current
discharge of 9.6 A AC to ground. This lowered the AC voltage of the pipe at the
test station from 33 V to 22 V; but, when measured with respect to remote earth,
the pipe voltage was only reduced from 53 V to 47 V.
At the north end of the collocation between the pipeline and the 345-kV
powerlines (Site B), the AC pipe voltage was 46 V—although voltages as high as
80 V had been recorded. A large magnesium anode was installed at this location
when the pipeline was constructed, but it was found to have no AC or DC current
output at the time of this investigation.
It was considered unlikely that additional corrosion damage, similar to that which
had resulted in the failure, could be found by conducting random excavations of
the pipeline. The pipeline nevertheless was excavated at the first joint
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:85
immediately adjacent to where the failure had occurred, with the hope of finding
and investigating additional corrosion sites.
A small nodule was found at this site. Measuring approximately 20 mm in
diameter by 20 mm in height, it was found on the top of the pipe beneath a 10mm-diameter break in the coating. Immediately after uncovering this anomaly, the
potential of the pipe was measured by placing a copper sulfate reference electrode
directly on top of the coating holiday. The pipe potential was found to be -1.08
VCSE.
The pH inside the nodule was measured using a combination pH/reference microelectrode and a high-impedance meter; it was found to be 17.0. Because the pH
meter was calibrated using buffer solutions of pH 4.0, 7.0, and 10.0, it is expected
that this unrealistically high pH value was the result of not using a high-pH buffer
solution during calibration. However, the pH of the nodule was later measured in
the lab and found to be 13.1.
The coating was removed from the vicinity of the anomaly, and the nodule was
removed for analysis. A corrosion pit was found immediately beneath where the
nodule and coating holiday had been. The pit was round, smooth, and dishshaped. It measured 30 mm in diameter by 1.35 mm deep.
Upon further investigation, a second nodule was found on top of the pipe. Nearly
identical in appearance to the first, it was located approximately 600 mm to the
west of Anomaly Nº 1 (Figure 3-65h). In this case, the nodule was protruding
through the pipe’s factory-applied PE coating. Once again, measurements were
taken within the break in the coating. The pipe potential was found to be -1.17
VCSE and the pH inside the nodule was 12.2.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:86
Figure 3-65h: Nodule of Corrosion Products Protruding Through Coating (Case History No. 4)
After removing the coating, the nodule of corrosion products was retrieved and the
pipe surface was cleaned. The cleaning revealed another round, dish-shaped
corrosion pit that measured 40 mm in diameter by 2.3 mm deep (Figure 3-65i).
Figure 3-65i: Corrosion Pit after Removal of Coating and Corrosion Products (Case History No. 4)
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:87
The corrosion products from the two pits, as well as those obtained from the
failure site, were analyzed for chloride ion content and pH. Two soil samples
were also retrieved from the excavation close to the sites of the two anomalies.
They were analyzed for the characteristics that are typically considered to
influence corrosivity.
Aside from the two coating holidays at which the corrosion pits were found, both
the factory-applied and the field-applied coatings were found to be in good
condition. They exhibited excellent adhesion to the pipe.
A portion of the anode bed was also excavated. The intent was to remove one
anode for analysis, to determine the cause of the low open-circuit potential of the
magnesium. An anode was located and was removed from the excavation. Upon
closer examination, however, no magnesium was found to remain. All that was
left of the 14.5-kg anode was its steel strap core, a small block of white
magnesium oxide, and the select backfill from the anode package.
The CP potentials measured directly on top of the two anomalies (-1.08 VCSE and 1.17 VCSE) indicate that the pipe surface exposed at the coating holidays was wellprotected. This was further verified by the high pH values of the nodules as
measured both in the field and afterward in the lab.
There was no evidence that the pipe was ever shielded from receiving CP current,
either by disbonded coating or by rocks in the soil. Furthermore, there was no
evidence that DC stray current interference problems had ever affected the
pipeline; a recent close-interval potential survey indicated that no such problems
exist at this time. Bacterial corrosion was also ruled out as a possible cause
because CP potentials more negative than -0.95 VCSE should be sufficient to
prevent bacterial corrosion.
At both anomalies, the opening in the coating was approximately 10 mm and the
pipe voltage was approximately 50 V; however, a peak of 60 V was recorded
during the site visit. The soil resistivity in the excavation varied from 12.5 Ω-m to
16.0 Ω-m. Using the more conservative values of 50 V and 16 Ω-m for the
calculation, the AC current density at the anomalies is found to be 800 A/ m2—
well above the threshold value of 100 A/ m2 at which AC corrosion can occur on a
cathodically protected pipeline.
Note that the soil resistivities measured in the excavation were significantly lower
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:88
than the bulk resistivities measured along the pipeline route using the Wenner
Four-Pin Method (92 Ω-m to 206 Ω-m, 160 Ω-m average). This is attributed to
the moderately high chloride ion content of the soil at the road crossing (190 ppm
to 215 ppm), presumably caused by the application of de-icing salts to the
roadway during the winter months.
As is generally found to be the case, the chloride ion contents were even higher in
the corrosion products than in the surrounding soil; they ranged from 275 to 470
ppm. This may be because the negatively charged chloride ions are attracted to
the corrosion site by the surplus of positively charged iron ions. Alternatively, the
chloride ions may become trapped in the corrosion product matrix and accumulate
during subsequent wetting and drying of the corrosion products; a similar scenario
occurs in the cement mortar of buried concrete piping. The highest chloride ion
content was found in the corrosion products taken from the failure site, which is
consistent with this site having a higher corrosion rate than either of the two
anomalies.
From the potentials and currents measured at the two primary anode beds on the
pipeline (sites A and B), and from the examination of one magnesium anode, these
anode beds appeared to have been totally consumed. Typically, a 14.5-kg anode
installed on a well-coated pipeline in moderately high-resistivity soil should have a
life in excess of 20 years; however, at high AC current densities the life of an
anode can be significantly reduced. Considering that the anode bank at Site A was
disconnected two years before the failure occurred, the life of this anode bed was
only eight years or less.
The most effective method of mitigating AC corrosion is to lower the pipeline
voltages to acceptable levels. In the moderately high-resistivity soil (i.e., 150 Ωm) that exists along the majority of the pipeline route, 30 V would be required to
produce AC current densities of 50 A/m2. Where chloride contamination of the
soil exists, however, pipeline voltages must be reduced to much lower values.
In order to determine the requirements for the AC mitigation system, the pipelinepowerline corridor was modeled using software developed as a research project by
the Pipeline Research Council International (PRCI). With no mitigation in place,
the modeling predicted voltage peaks of approximately 200 V where the pipeline
enters and leaves the 345-kV powerline corridor (Figure 3-65j).
AC voltages are most effectively mitigated by installing ground electrodes at
major electrical discontinuities along the pipeline-powerline corridor because this
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:89
is where the peak voltages are generated. In order to reduce the peak voltages
below 30 V (to reduce AC current densities below 50 A/m2), it was determined
that an 800-m-long horizontal wire electrode would need to be installed at each of
the two critical locations. In order to further reduce these voltage peaks to 15 V
for electrical safety reasons, the ground electrodes would each need to have a
resistance of 0.1 Ω, which could not be realistically achieved, given the local soil
conditions.
Induced AC Pipe Voltage (V)
1000
100
1
2
15 V
10
3
A
B
1) No Mitigation
2) 0.5 Ω at A & B
3) 0.1 Ω at A & B
1
0
5
10
15
20
Distance from North Volney (km)
Figure 3-65j: Effects of Installing Ground Electrodes at sites A and B (Case History No. 4)
In addition to the ground electrodes, DC decouplers were to be installed across the
insulators at each end of the line to further reduce the induced voltages.
A detailed survey of soil resistivities was first conducted using an electromagnetic
soil conductivity meter, which can identify pockets of low-resistivity soil that
might be AC corrosion hot-spots. Using Equation 3-38b in conjunction with the
close-interval soil resistivity data, the AC current densities were calculated
assuming the worst case of a 1-cm2 holiday (Figure 3-65k). Note that detailed soil
resistivity data are only available between the chainages of 4 km and 10.5 km.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:90
AC Current Density (A/sq.m)
1000
1
100
2
50
3
10
A
B
1
0
5
10
1) No mitigation
2) 400 m wires at A & B
3) 800 m wires at A & B;
DC decouplers at insulators
15
20
Distance from North Volney (km)
Figure 3-65k: Effects of Installing Ground Electrodes on AC Current Densities (Case History No. 4)
It is important to note that the mitigation wire also provides a secondary benefit in
the mitigation of AC corrosion, just as it does in the mitigation of AC voltages.
For a coating holiday located in the vicinity of the mitigation wire, the effective
resistance of the holiday is increased because of the mutual resistance between the
holiday and mitigation wire; the increase thereby reduces the AC current density at
the holiday to a value less than that predicted by Equation 3-38b. The resistance
of a 1-cm2 circular holiday can no longer be calculated using the equation for the
resistance of a circular disk because its resistance is now closer to that of a 1-cm2
area on the surface of the mitigation wire. This mutual resistance effect can be
thought of in terms of anode interference effects, where the installation of one
anode close to another effectively raises the individual resistances of both anodes.
In view of this, it is quite likely that the use of two 800-m-long mitigation wires
would reduce AC current densities at all locations along the pipe to 50 A/ m2 or
less.
Recall that the corrosion failure occurred immediately adjacent to a large
magnesium anode bed but that the prematurely consumed anode bed had been
disconnected from the pipeline approximately two years before the failure
occurred. Even though the anode bed was not contributing CP current and its
effectiveness as an AC ground electrode was reduced, it should still have been
effective in limiting the magnitude of the AC current density at nearby holidays. It
is therefore suggested that the majority—if not all—of the pit growth may have
actually occurred over a two-year period rather than a 10.5-year period and that
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:91
the AC corrosion rate may have been as high as 125 mils/y.
A mitigation wire typically consists of a ribbon of sacrificial anode material
installed parallel to the pipeline, and connected directly to the pipeline. In the case
of zinc ribbon, the ribbon must be installed in select sacrificial anode backfill to
ensure that the anode material does not passivate and that it maintains a low
resistance to earth. Alternatively, bare copper wire may be used—provided that it
is connected to the pipeline through a DC decoupling device to prevent it from
draining CP current away from the pipeline. For large ground electrodes, the cost
of this device is easily offset by the lower material costs for copper wire versus
zinc ribbon in backfill. Furthermore, the copper wire is easier to install than the
zinc because it can be installed using a cable plough rather than a ditching
machine and, again, need not be installed in special backfill.
Two ground electrodes were subsequently constructed using AWG 2/0 copper
cable. They were center-connected to the pipe (through a DC decoupler) in order
to reduce the effects of attenuation along the wire. It must be emphasized that
when using copper wire as a ground electrode, maintaining the DC isolation of the
copper wire from the pipe is critical; it requires a commitment to regular
monitoring because, should the device fail, it would do so in short-circuit mode
that would have serious corrosion consequences if undetected.
3.4.2.3
AC Corrosion Field Test Procedures
At this writing, there is no specific test for the identification of AC corrosion—
other than calculating the AC current density at the pit site and systematically
eliminating all other possible causes. As described in the case histories above,
corrosion investigations conducted on pipelines subject to AC interference must be
conducted carefully using the procedures suggested below. Note that most of
these steps would be conducted in the course of any corrosion investigation,
regardless of whether AC corrosion was suspected.
1)
Carefully excavate the anomaly, being careful not to disturb the
soil immediately adjacent to the anomaly or the corrosion products.
2)
Measure DC and AC potentials at several stages of the excavation.
3)
Obtain soil samples from adjacent to the anomaly and from the
side of the excavation at pipe depth, and determine:
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:92
a)
b)
c)
d)
e)
f)
g)
Soil resistivity, both as-found and then saturated with distilled
water
Moisture content
pH
Chloride ion concentration
Sulfide ion concentration. A quantitative test can be
conducted by mixing the corrosion products with iodine and
3% sodium azide solution and checking for the evolution of
nitrogen gas.
Concentrations of other cations, specifically Ca++, Mg++, Na+,
K+, Li+.
Soil type, color, and any other special characteristics.
4)
Photograph the anomaly after first exposing it.
5)
Examine the condition of the coating and determine if the anomaly
may have been shielded from receiving CP current.
6)
Measure the potential at the anomaly by placing a reference
electrode immediately on top of any corrosion products.
7)
Using a combination pH/reference micro-electrode and a
compatible meter, measure the pH and potential at the bottom of
the pit.
8)
Remove the corrosion products from the pit and conduct tests to
determine:
a)
b)
c)
9)
pH
Concentrations of ions as discussed in Step 3.
Sulfate-reducing bacteria concentration.
This can be
determined using a kit such as Conoco’s RapidChek II SRB
Detection System.
Photograph the pit after cleaning it and measure its dimensions.
10) Conduct 24-hour recordings of AC and DC pipe potentials and
review the history of these potentials over the life of the pipeline.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:93
After gathering the above data, conduct the following analysis to determine if AC
corrosion was the primary cause of the pit.
1) Determine if the pit site was cathodically protected by considering
the pH and potential measurements taken in the soil, on the
corrosion products, and at the bottom of the pit. If measurements
taken adjacent to the pit indicate protection, but those taken within
the pit do not, determine if the pit could have been electrically
shielded by the coating, the corrosion products, or something in the
soil. Consider the CP history of the pipeline and determine if some
prior CP deficiency or stray current interference problem could have
caused the pit.
2) Determine if the pit could have been caused by bacterial corrosion
by considering the pipe potential (relative to -950 mVCSE), the
presence of sulfides, the degree of soil aeration (anaerobic), and the
count of sulfate-reducing bacteria measured within the pit.
3) If the pit site appears to have received adequate CP over the life of
the pipeline, and if bacterial corrosion can be ruled out, investigate
the possibility of AC corrosion. Using the soil resistivity and the
surface area of the coating holiday (or, if not known, the area of the
pit), calculate the AC current density while considering any
variations in AC voltage that may have occurred over time.
Consider the appearance of the pit site compared to the appearance
of the sites discussed in the case histories (i.e., hard hemisphere of
soil surrounding the pit site; smooth, round dish-shaped pits having a
minimum diameter of 1 cm; hard tubercles covering the pit; etc.).
4) If the CP potential at the pit site is very electronegative, causing the
pH to be very high, determine the total ratio of earth alkaline ion to
alkaline ion concentrations at the pit site and in the bulk soil to
determine what effect this might have on AC current densities at the
pit site.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:94
3.4.3 Fault Current Effects
The greatest concern regarding the transfer of fault current between a faulted
powerline structure and a pipeline is whether there is enough energy available to
create an electric arc through the soil. If this should occur, the current path
through the soil to the pipeline becomes ionized and results in much higher
currents and current densities than would be the case during normal conditions of
soil conduction. Such conditions lead to a greater risk of pipeline damage.
There have been more than 20 reported instances of AC fault current causing the
wall of a steel pipeline to melt and puncture. Partial melting of the pipe wall will
create a heat-affected zone subject to embrittlement from the application of CP
current.
The most effective means of preventing arcs during fault conditions is to maintain
a safe separation distance between the powerline structures and the pipeline.
Minimum separation distances are usually specified by both the power company
and the pipeline company; however, safe separation distances specifically to
prevent arcing must either be calculated or determined from research reports. One
such calculation is provided by Sunde, who gives the following equations for the
distance r (m) over which an arc could occur—based on soil resistivity ρ (Ω-m)
and fault magnitude If (kA).
r = 0.08 I f ⋅ ρ
( ρ < 100 Ω - m)
[3-39a]
r = 0.047 I f ⋅ ρ
( ρ > 1000 Ω - m)
[3-39b]
If safe separation distances are unattainable, then screening electrodes can be used
to intercept the fault current. These would typically consist of either lengths of
zinc ribbon or banks of packaged sacrificial anodes connected directly to the
pipeline, installed between the pipeline and the powerline structure. Screening
electrodes may prevent damage to the pipe at the location of fault current pick-up,
they lower the resistance between the pipeline and the powerline structure. Hence,
they encourage fault current to use the pipeline as a current path. Because this
could possibly increase the risk of pipeline damage at locations of fault current
discharge, screening electrodes should be used with caution.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:95
Fault currents can also damage pipeline coatings, thereby increasing CP current
requirements. Dawalibi noted that 2500 V might be sufficient to cause a slow
degradation of the coating—if the coating’s dielectric strength was not high
enough to withstand the stress and if the frequency of the faults is relatively high.
Southey reported that damage to bitumen coatings can occur at voltages ranging
from 1000 V to 2000 V. Damage to polyethylene and FBE coatings occurs at
voltages of between 3000 V and 5000 V. Dabkowski provided voltage limits for a
variety of coatings (Table 3-4).
Table 3-4: Voltage Puncture Levels for Various Holiday-Free Coatings9
Coating
Puncture Level (V)
Coal Tar Epoxy.............................................. 3500
Coal Tar ......................................................... 4500
Coal Tar Enamel............................................ 5000
Asphalt........................................................... 7000
Fusion Bonded Epoxy ............................. 1000/mil
The nature and severity of the damage that occurs to both the coating and the pipe
wall are dependent upon the type of coating used. A fault occurring on a coal tarcoated pipe has been found to result in the least damage to the coating, but the
greatest damage to the pipe wall, with the size of the damaged areas to both being
approximately the same. PE and FBE coatings, however, experience much greater
damage to the coating relative to the size of the damaged area on the pipe wall
(sometimes an order of magnitude greater).
High-current, short-duration faults have been found to cause greater damage to
coatings than low-current, high-duration faults having the same energy (i.e., the
same product of current and duration).
Fault currents can also damage CP test facilities, rectifiers, electrical insulators,
DC decoupling devices, and bonds (see Figure 3-66).
9
Pipeline Coating Impedance Effects on Powerline Fault Current Coupling”, PRCI/AGA Report #PR-200634, Dec. 1989, pp3-56.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:96
Figure 3-66: Fault Damage to CP Bond
3.5
Induced AC Voltage Prediction and Mitigation
Calculations
3.5.1 Data Gathering
The first step in calculating induced AC voltages, is the careful collection of
pipeline, powerline, and route data.
The pipeline characteristics that must be determined are those that affect the
pipeline’s electrical properties. They include pipe wall thickness and diameter as
well as coating resistance and thickness. If the pipeline is cathodically protected
using sacrificial anodes, this will greatly affect its electrical characteristics. On the
other hand, if the pipeline is new and sacrificial anodes are to provide both AC
mitigation and CP, then the CP current requirements for the pipeline must be
known. Any changes in the electrical characteristics along the pipeline should also
be identified—the most important of these being the location of any electrical
insulators.
The information required for the powerlines is more extensive, and generally more
difficult to obtain, than the pipeline data.
For each powerline circuit, information on the current loading must be obtained. It
is generally assumed that each phase of a three-phase circuit carries approximately
the same current; however, the power company might provide information that
indicates otherwise. Because loads increase with increased development, current
loading may vary over the course of a day (e.g., daytime vs night-time), from day
to day (weekday vs weekend), seasonally (winter vs summer), or annually.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:97
In addition to these types of load variations, loads may also change abruptly
during emergency conditions. For example, if a powerline circuit is temporarily
removed from service, its load must be transferred to one or more other circuits.
The maximum current with which a circuit can be loaded depends not only upon
the conductor size, but also upon the duration of the emergency condition (the
shorter the duration, the higher the current capacity) and the ambient temperature
(the colder the temperature, the less the conductors will sag as the loading
increases).
In the case of determining fault current effects, the maximum line-to-ground fault
current must also be obtained for each paralleling high-voltage circuit. Where the
pipeline parallels the powerline over a significant distance, the fault current that is
available at one end of the collocation may be different from that available at the
other end. Hence, fault current data for each circuit may be required at a number of
different locations.
With regard to the geometric configuration of the powerlines, the horizontal and
vertical separation distances between each of the phase conductors and shield
wires must be known—as well as the height of the conductors above ground.
Because the conductors sag considerably between towers, this height is usually an
average height based on a simple formula to be discussed later.
The physical construction of the phase conductors is unimportant, but the
construction of the shield wires is somewhat important because it affects the
magnitude and phase of the currents that are induced in the shield wire. The
information typically required for a shield wire is its geometric mean radius, or
GMR, and its lineal resistance in Ω/km.
Finally, the order in which the phases are arranged on the towers must be known
because—as Section 3.3.1 shows—this is critical in determining the phase and
magnitude of the LEF.
Once the pipeline and powerline information is known, the only other information
required is that pertaining to the route shared by the pipeline and powerlines.
Route-related information includes the pipeline-to-powerline separation distances,
soil resistivities along the route at pipe depth, and the locations of electrical
discontinuities.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:98
In addition to pipeline insulators, electrical discontinuities include any location
where the LEF as seen by the pipeline changes in either magnitude or phase—such
as at the following locations:
• A change in the separation distance between the pipeline and the
powerline.
• The powerline ends, such as at a station, or diverges from the pipeline
right-of-way. Similarly, where a pipeline ends or diverges from the
powerline right-of-way.
• A change in the position of one powerline relative to the position of
other powerlines, where multiple powerlines exist.
• A change in the configuration of the conductors on a powerline.
• A change or transposition in the conductor phase arrangement.
• A tie-in to a substation.
The electrical power company can provide much of this information, but important
details such as phase transpositions quite often may go unreported. It is thus
important to visually inspect the entire route of the pipeline-powerline co-location
to identify discontinuities and to confirm information provided by the power
company on details such as tower type and conductor configuration. Note that
obtaining powerline information is often the slow step in the AC mitigation design
process.
3.5.2 Field Estimation of LEF
In some simple cases, the magnitude of the LEF can be estimated in the field using
the horizontal wire method. Using this method, a well-insulated wire is placed
along the ground, parallel to the powerlines and in the approximate positions that
the pipeline will be constructed. One end of the wire is grounded using a small
ground pin or screwdriver. The AC voltage at the other end of the wire is then
measured to ground using an AC voltmeter and a second ground pin (Figure 3-67).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:99
LEF ≅
V
L
L
Figure 3-67: Field Estimation of LEF Magnitude Using Horizontal Wire Method
The AC voltage induced in the wire, divided by the wire length, is approximately
equal to the magnitude of the LEF.
LEF =
V AC
L
[3-40]
This measured value can either be used to validate calculated values of LEF
magnitude or, in simple problems involving only one powerline and a limited
number of discontinuities, it might be used in lieu of obtaining any powerline
information. In the latter case, however, exercise caution because current loading
and the resulting LEF may change significantly over time. Also, the use of the
measured value of LEF may result in the inadequate design during times of peak
loading.
3.5.3 Measurement and Interpretation of Soil
Resisitivity Data
The accurate measurement and interpretation of soil resistivities along the pipeline
route is critical in AC mitigation design work, even more so than for CP system
design. Soil resistivities affect the magnitude of voltages induced on the pipeline,
the effectiveness of the mitigation system, the AC current densities at holidays and
the AC corrosion risk, the distance over which arcing may occur between the
pipeline and a faulted structure, and the body currents that result from electrical
shocks.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:100
In some cases, the resistivities required are those at pipe depth, such as for AC
corrosion calculations and induced AC voltage predictions. However, when
designing large electrodes to serve as grounds for AC mitigation purposes,
examine the variation of soil resistivity versus depth so that a layer-soil model can
be established. The model would be suitable for calculating the ground electrode’s
resistance.
When resistivities are measured to a constant depth at regular intervals along the
pipeline route, this is referred to as a resistivity profile. When the variation of
resistivity versus depth is examined at a single location, this is referred to as a
resistivity sounding. Resistivities may also be measured from small samples of
soil either in-situ or after removing the sample from the earth. These methods and
their applications are discussed below.
In North America, the simplest and most common method with which to conduct a
soil resistivity sounding is the Wenner Four-Pin Method. In this technique, four
equally spaced pins are placed in the earth in a co-linear array where the pin
separation is “a.” A current is circulated between the outside pair of pins while the
resulting potential is measured between the inside pair of pins (Figure 3-68). The
apparent resistivity for the soil in the general vicinity of the pins is then
determined by Equation 3-41.
I
V
Figure 3-68: Soil Resistivity Measurement Using the Wenner Four-Pin Method
ρ a = 2πa
CP Interference Course Manual
© NACE International, 2006
January 2008
V
I
[3-41]
AC Interference
3:101
The test current used for measuring resistivity can be AC, DC, or reversing DC.
The instrumentation used to produce and measure the test current, and measure the
resulting voltage, may consist of either a current source in combination with an
ammeter and a voltmeter or a combination of all these components into a single
resistivity instrument.
The apparent resistivity measured at a particular pin spacing is not the average
resistivity of the soil to a depth equal to the pin spacing, nor is it the resistivity of
the soil at a depth equal to the pin spacing. The apparent resistivity is actually a
weighted average of the resistivities of all soil layers existing beneath the pin
array. The soil having the greatest influence on the apparent resistivity
measurement is that which exists at a depth equal to one-third the pin spacing
(a/3). The investigation depth for the array (i.e., the depth at which one-half the
contribution to the apparent resistivity comes from the soil above that depth, and
the other half comes from the soil below that depth) is approximately equal to onehalf the pin spacing (a/2).
Soil resistivity can be measured using any combination of two current pins and
two potential pins. The geometric factor relating pin spacing, current, and voltage
to resistivity can be established using a simple mathematical procedure. However,
as the pin array becomes less and less orderly compared to the Wenner array, the
interpretation of how soil resistivity varies with depth becomes increasingly
difficult
Soil resistivity is seldom uniform over large depths. When designing a large
ground electrode for AC mitigation purposes, the resistivity of the surface soils
alone cannot be used to accurately calculate electrode resistance. When
conducting a soil resistivity sounding, apparent resistivities are measured over a
wide range of pin spacings (e.g., 1 m to 100 m). This data can then be used to
determine the thicknesses and resistivities of the various soil layers so that ground
electrode resistance can be accurately calculated.
Various empirical methods exist for interpreting apparent resistivity data—most
notably, the Barnes layer method. However, the assumptions upon which these
methods are based are flawed and can lead to inaccurate soil models. There are
numerous software packages available for interpreting apparent resistivity data;
these packages are known as inverse-modeling software. Nevertheless, in lieu of
such software, curve-matching techniques are the most accurate method of
determining a layered soil model.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:102
In a two-layer soil (e.g. soil over bedrock), the apparent resistivity as measured
using a Wenner array is a function of pin spacing, upper layer height, and the
resistivity of the upper and lower layers. A set of standard curves can be
produced, which when fitted to the field data, will indicate the height of the upper
layer, and the resistivities of the upper and lower layers. Even in cases where the
soil consists of multiple layers, a two-layer model is generally an adequate
representation for electrode resistance calculations, and provides better accuracy
than if the earth was assumed to be uniform. The curve matching procedure is
explained in Appendix A, along with an example of its use. Note that the use of
this procedure will be demonstrated in class.
Soil resistivity profiling is used extensively in agricultural and archaeological
applications, but is seldom used for pipeline corrosion purposes. Some possible
applications for conducting a soil resistivity profile along a pipeline route would
be to determine anode resistances for a distributed anode cathodic protection
system, to locate pockets of low resistivity soil for installing ground electrodes,
and to locate pockets of low resistivity soil which may pose an AC corrosion
concern.
Profiles may be conducted using a four-pin array, either by relocating the entire
array at regular intervals along the pipeline route, or by orienting the array parallel
to the pipeline route, and leap-frogging the rear pin to the front of the array each
time a measurement is made.
Automated systems have been developed for rapidly conducting four-pin
resistivity profiles, however electromagnetic methods also exist which require no
physical connection to the earth and which can obtain continuous resistivity data
along the pipeline route, at the same rate as which the surveyor can walk. These
systems tend to be insensitive to resistivity variations in high resistivity soils, and
are also very susceptible to errors arising from structural interference, and can
therefore not be used in close proximity to existing pipelines, metallic fences,
buried cables, etc.
A resistivity profile will not be able to indicate the actual resistivity at pipe depth,
however if the pin spacing is chosen to be three times the pipe depth, the soil at
pipe depth will have the greatest influence on the measured resistivity.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3.6
3:103
Prediction of Steady-State Induced AC Voltages
3.6.1 Introduction
In order to calculate the steady-state AC voltages which are electromagnetically
induced on a pipeline, the following steps must be followed:
• Calculate the electrical characteristics of the pipeline.
• Divide the pipeline-powerline route into sections, where the pipeline
along each section has uniform electrical characteristics, and the LEF
along each section has a constant magnitude and phase angle.
• Determine the LEF for each section.
• Calculate the resulting pipe voltages.
3.6.2 Calculation of Pipeline Electrical Characteristics
The following parameters must be calculated.
Yi
Zi
Γ
α
Z0
Coating Admittance (Ω-1/m)
Internal Impedance (Ω/m)
Propagation Constant (m-1)
Attenuation Constant (m-1)
Characteristic Impedance (Ω)
The admittance of the coating is essentially the coating’s conductance—in other
words, the inverse of its electrical resistance. However, admittance is the general
term used here because it is the inverse of the coating’s impedance.
The resistance of the pipeline coating could be determined experimentally by
taking a section of coating having an area, A, and placing it between two metallic
plates to which an ohmmeter is connected (Figure 3-69). The specific coating
resistance r′cwould then be determined as the resistance value measured by the
ohmmeter and multiplied by the area of the coating. Specific coating resistance is
constant regardless of the area of the section of coating being tested because the
measured resistance is inversely proportional to coating area.
r′c = R ⋅ A
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-42]
AC Interference
3:104
If the resistivity of the coating material is known, then the specific coating
resistance can be calculated as
r′c = ρ ⋅ L / A
[3-43]
Figure 3-69: Determination of Pipeline Coating Resistance
Using Equation 3-43 in conjunction with values of resistivity for the base
materials used in pipeline coatings may result in unrealistically high values for
specific coating resistance. This possibility exists because, in practice, a coating
contains holidays that lower its resistance.
Table 3-5: Specific Leakage Resistances and Conductances in 1000 Ω-cm Soil or Water
Long Pipelines
with
Few Fittings
Quality of Work
Average Specific
Coating Conductance
g′c
Siemens/ft2
-5
Average Specific Coating
Resistance
r′c
Siemens/m2
Ω-ft2
Ω-m2
5
>104
Excellent
<1 x 10
Good
1 x 10-5 to 5 x 10-5
1 x 10-4 to 5 x 10-4
2 x 104 to 105
2 x 103 to 104
Fair
5 x 10-5 to 1 x 10-4
5 x 10-4 to 1 x 10-3
104 to 2 x 104
103 to 2 x 103
Poor
Bare Pipe
(2 to 12 in)
(5 to 30 cm)
>1 x 10-4
>1 x 10-3
<104
<103
4 x 10-3 to 2 x 10-2
4 x 10-2 to 2 x 10-1
50 to 250
5 to 25
CP Interference Course Manual
© NACE International, 2006
January 2008
<1 x 10
-4
>10
AC Interference
3:105
A section of pipe having a length L and diameter D has a resistance to earth
through its coating that is calculated as:
rc′ (Ω ⋅ m 2 )
rc′
=
Rc (Ω ) =
πDL
A pipe (m 2 )
[3-44]
The coating’s conductance is therefore the inverse of Equation 3-44, or:
Gc =
πDL
1
=
Rc
rc′
[3-45]
The coating conductance per unit length of pipeline, gc would therefore be:
gc =
GC
πD
=
L
rc′
[3-46]
having the units Ω-1/m,or mhos/m, or siemens/m:
The internal impedance of the pipe is that which would be measured, if an
impedance meter was connected from one end of the pipe to the other, as shown in
Figure 3-70. The pipe’s internal impedance is a function of pipe diameter and wall
thickness, the electrical resistivity and magnetic permeability of the pipeline steel,
and the frequency of the AC source.
Ζ(Ω)
Figure 3-70: Determination of Pipeline Internal Impedance
The internal impedance of the pipe is calculated as:
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
Zi =
3:106
⎧ [sinh (t n ) + sin (t n )] + j [sinh (t n ) − sin (t n )]⎫
⎬
(2π)(0.0127 D ) ⎨⎩
cosh (t n ) − cos(t n )
⎭
0.5ωμ s ρ s
[3-47]
where:
t n = 0.036 t
ω μs
ρs
[3-48]
and where:
t = wall thickness (in)
μs = magnetic permeability of steel
= 3.78 × 10-4 H/m
ρs = resistivity of steel
= 1.7 × 10-7 Ω-m
ω = frequency (radians/s)
D = pipe diameter (in)
j = complex operator
The pipeline propagation and attenuation constants both describe how an AC
signal attenuates along the length of a pipeline. The attenuation constant used in
AC interference calculations differs from the attenuation constant used in CP
calculations because the DC constant does not take into account capacitance across
the coating and inductance along the pipeline.
The pipeline propagation constant Γ is calculated as follows
⎡
1.12 ⎤
⎡
⎤
1n
⎢
⎥
jωμ0
1.85
2 1
′
⎥
⎢
Γ
a
Γ⎢ +
•1n
⎥ = Zi +
−1
⎢ a′ Γ 2 + jωμ ρ −1 + jωε ⎥
2π
)⎦
⎢Yi π (ρ + jωε)⎥
0(
⎣
⎣
⎦
where:
h = pipe depth (m)
μ0 = permeability of free space
= 1.26 × 10-6 H/m
ε = soil permittivity
= 2.66 × 10-11 f/m
ρ = soil resistivity (Ω-m)
j = complex operator
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-49]
AC Interference
3:107
Yi = coating admittance = GC
and where:
a′ =
0.25 D 2 + 4h 2
[3-50]
and j, ω, D, Zi, and were previously defined.
Note that in Equation 3-49, Γ exists on both sides of the equation. This type of
equation, known as a transcendental equation, can therefore only be solved
iteratively using computer methods.
The pipeline attenuation constant is then simply the real part of the propagation
constant:
α = Re[Γ]
[3-51]
α = ⏐Γ⏐cos(∠Γ)
[3-52]
that can be calculated as:
Finally, the characteristic impedance of the pipeline can also be calculated once
the propagation constant is known:
Z0
⎡
1.12 ⎤
1n
⎢1
Γ a′ ⎥
= Γ⎢ +
⎥
−1
⎢Yi π (ρ + jωε)⎥
⎣
⎦
[3-53]
3.6.3 Sectionalization of Pipeline-Powerline Route
Once the electrical characteristics of the pipeline have been determined, the
pipeline-powerline collocation must be divided into sections. The pipeline along
each section exhibits uniform electrical characteristics, and the LEF along each
section exhibits a constant magnitude and phase angle. A location where there is a
change in either the electrical characteristics or the LEF is referred to as a node.
Depending upon the method of calculation, it is generally at the nodes where the
induced voltages are calculated. Any such change is known as an electrical
discontinuity. These discontinuities create induced voltage peaks.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:108
The pipeline-powerline route may be further sectionalized to reflect the changes in
soil resistivity (which may introduce small voltage peaks) or to simply increase the
number of nodes where induced voltages may be calculated. Conversely, where
the changes that occur between one section and another are relatively insignificant
(such as where a small change in the separation distance between the pipe and
powerline occurs), the number of sections might be reduced to simplify the
analysis of the problem.
As Section 3.5.1 discusses, electrical discontinuities include—but are not limited
to—the following: 1) pipeline insulators, 2) locations where the pipeline and
powerline diverge from one another, 3) locations where the powerline circuit
configuration changes, and 4) locations where the powerline phase arrangement
changes. An example of this procedure appears in Figure 3-71.
Node N o 1
Section N o
3
2
1
2
4
3
Powerline
Pipeline
Figure 3-71: Sectionalization of Pipeline-Powerline Route
3.6.4 Determination of Longitudinal Electric Field (LEF)
The most difficult step in the calculation of induced voltages is in the
determination of the magnitude and phase angle of the LEF to which each section
of the pipeline is exposed.
In the simple case where a pipeline parallels a single three-phase circuit—where
the pipeline electrical characteristics and the LEF are constant along the entire
collocation—the magnitude of the LEF may be measured (this was discussed in
Section 3.5.2). The magnitude of the field can then be correlated with the loading
at the time of the measurement (if this information is available from the power
company) to determine what the maximum field strength might be during times of
peak loading. If two or more circuits exist along the pipeline route, it would be
difficult to make this correlation.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:109
Where more complex geometries exist in the pipeline-powerline route, the
magnitude LEF along each section of the pipeline can still be measured as
described above; however, there is no simple way of measuring the phase angle of
the LEF along each section. The phase angle of the LEF is not required to
calculate pipeline voltages in the simple case where only one section exists; but, it
is important when two or more sections exist. For complex geometries, the LEF
must be calculated using either the basic equations or specialized software; it may
also be determined graphically using published charts.
The LEF resulting from a Iφ flowing in a powerline conductor is a function of the
mutual impedance ZM between the pipeline and the powerline.
E = I φ ⋅ ZM
[3-54]
In a three-phase system, the mutual impedances between the pipeline and each of
the phase conductors (ZMA, ZMB, ZMC), as well as between the pipeline and each of
the shield wires (ZMSI, ZMS2), must be calculated. Also, the currents induced in the
shield wires (ISI, IS2) must be determined.
E3φ = IA ⋅ ZMA + IB ⋅ ZMB + IC ⋅ ZMC + IS1 ⋅ ZMS1 + IS2 ⋅ ZMS2
[3-55]
In general, the mutual impedance between two parallel conductors is calculated
using Carson’s Equation as follows:
ZM =
where:
and where:
j ⋅ f ⋅ μ 0 ⋅ 1n
(H
− H '+ 2 ρ / j 2 π f μ 0 ) + d 2
2
(H
[3-56]
+ H' ) + d 2
2
f = frequency (Hz)
μ0 = permeability of free space
= 1.26 × 10-6 H/m
ρ = soil resistivity (Ω-m)
j = complex operator
H, H′, d, and D define the pipeline-powerline geometry, as
shown in Figure 3-72
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:110
Figure 3-72: Pipeline-Powerline Geometry for Calculation of LEF
As an alternative to calculating the LEF, a series of standard curves have been
published by the Electrical Research Power Institute (EPRI Report No. EL-3106).
The report relates the magnitude and phase angle of the LEF to conductor height h,
conductor spacing s, pipeline-powerline separation distance d, soil resistivity ρ,
phase current I, as well as phase arrangement and conductor configuration.
Although there is theoretically an infinite number of possible combinations of
these factors to account for, the publication contains a manageable number of
curves to cover most practical applications. The number of required curves has
been minimized by adopting a parametric approach, where variables such as d and
h are normalized with respect to s, thereby effectively reducing the number of
variables. Figure 3-73 gives an example of one set of curves to determine LEF
magnitude for a particular tower geometry and soil resistivity. Note that the use of
these curves will be further demonstrated in class.
In cases where the pipeline is paralleled by more than one powerline, the fields
generated by each individual powerline are determined. They are then added
together (see Equation 3-57), using the rules of vector algebra that Section 3.2.1
describes.
E = E1 + E2 + E3 + … + EN
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-57]
AC Interference
3:111
s
=1
h
0.056
B
C
0.8
0.048
s
0.7
A
s
TOWER
GEOMETRY
h
0.040
0.6
d
0.5
0.032
0.4
Balanced Phase Currents
ρ > 3 ohm-meters
0.024
0.3
0.016
s
= 0.2
h
0.008
0
2
4
6
8
10
12
14
Normalized Distance From Tower Center - d / s
Electric Field Horizontal Circuit Configuration
Figure 3-73: Typical Series of Curves for Determining LEF
(Reprinted from J. Dabkowski, NACE Corrosion /80)
3.6.5 Calculation of Induced Pipeline Voltages
In the case of a simple pipeline-powerline geometry (Figure 3-74), the induced
voltage at any point along the pipeline can be calculated by using a transmission
line model (Figure 3-75).
Powerline
d
L
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:112
Figure 3-74: Simple Pipeline-Powerline Corridor (Plan View)
Powerline
LEF = E0
x=0
Z0
x=L
Pipeline
Z1
Z2
Figure 3-75: Simple Pipeline-Powerline Model
Vx =
{[
]
[
]
E0 Z 2 (Z1 − Z 0 ) − Z1 (Z 2 + Z 0 )e ΓL e −Γx − Z1 (Z 2 − Z 0 ) − Z 2 (Z1 + Z 0 )eΓL e Γ( x−L )
Γ (Z1 + Z 0 )(Z 2 + Z 0 )eΓL − (Z1 − Z 0 )(Z 2 − Z 0 )e −ΓL
[
]
}
[3-58]
where:
E0
L
x
Γ
Z0
Z 1, Z 2
e
=
=
=
=
=
=
=
magnitude of LEF
pipeline length (m)
distance to point of interest (m)
pipeline propagation constant (m-1)
pipeline characteristic impedance (Ω)
pipeline terminating impedances (Ω)
2.718
In this model, the characteristic impedance determines how the induced AC signal
attenuates along the pipeline; the terminating impedances can be used to represent
whatever might be physically attached to the ends of the pipeline. The terminating
impedances may include:
Pipeline insulator................................ Z = ∞
Ground electrode................................ Z = ground electrode resistance
Pipe section (electrically long)........... Z = Z0
Pipe section (electrically short).......... Z = ZG
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:113
where ZG is the grounding impedance of a short section of pipe having a length L,
as determined by:
ZG = Z0 coth (ΓL)
[3-59]
Hence this simple model enables one not only to predict the induced AC voltages,
but also to determine the effects of various AC mitigation systems.
With this model, the locations where discrete ground electrodes can be added are
limited to the endpoints; however, these are where the peak voltages occur and are
thus the optimal locations for ground electrode installations. Furthermore, this
model allows for the use of distributed ground electrodes; but, this may not be
readily apparent by looking at the model.
Recall that the characteristic impedance Z0 for the pipeline is a function of the
coating admittance. If uniformly distributed ground electrodes (such as sacrificial
anodes) are installed along the pipeline, they can essentially be modeled as coating
defects.
If the resistance of a single anode is RA, then the parallel combination of N anodes
uniformly distributed along the pipeline will be RA/N, assuming that the anodes are
installed sufficiently far apart from one another so that interference effects can be
ignored. The total admittance of the anodes to earth YAT is therefore:
Y AT =
N
RA
[3-60]
and the admittance per unit length would be as shown in Equation 3-61, where L is
the length of the pipeline and S is the anode spacing.
Y AT
N
1
=
=
L
L ⋅ RA S ⋅ RA
[3-61]
To determine the total admittance of several admittances connected in parallel, the
admittances need only be added together. Therefore, the effective coating
admittance after mitigation, YM, is simply the original coating admittance plus the
anode admittance per unit length.
Y M = Yi +
CP Interference Course Manual
© NACE International, 2006
January 2008
1
S ⋅ RA
[3-62]
AC Interference
3:114
The value calculated for YM is then substituted back into the equations for the
propagation constant and characteristic impedance, allowing one to determine the
mitigative effect of the distributed anodes.
Note:
Because the equations for the propagation constant, characteristic
impedance, and the resulting pipeline voltages are complex, example
calculations will be conducted in class with the help of a spreadsheet
program.
For more complex pipeline-powerline geometries than that shown in Figure 3-75
(i.e., those with more than one section, such as that shown in Figure 3-71), the
procedure for calculating induced pipeline voltages is more complicated. One
such method, as described in EPRI Report No. EL-3106, is outlined below.
The voltage at any node on a pipeline having N discontinuities is calculated as:
N
V = P0 ∑ E Si ni e − jαλ i
[3-63]
i =1
where P0, known as the parameter coefficient of voltage, is calculated as:
P0 =
1
2Γ
[3-64]
The variable Esi is the difference in the LEF to the left and right of the ith
discontinuity, which is responsible for generating the voltage at the discontinuities.
ESi = ELi – ERi
[3-65]
However, the voltage at ith discontinuity is not only a result the change in the LEF
that occurs at this discontinuity, but also dependent upon the magnitude of ESi that
is generated at all other discontinuities along the pipeline. As the discontinuities
become increasingly remote from the discontinuity in question, their effect on the
magnitude of the voltage generated at the subject discontinuity diminishes; this is
accounted for in Equation 3-63 by the scaling factor ni.
ni = 10 kαλ i
where:
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-66]
AC Interference
3:115
k = a constant ≈ -0.458
α = pipeline propagation constant (m-1)
λι = distance from the ith discontinuity to the
subject discontinuity (m)
Similarly, as the discontinuities become increasingly remote from the subject
discontinuity, there is a rotation that occurs in the phase angle of the ESi value of
the ith discontinuity when its effect is accounted for at the subject discontinuity.
This phase angle rotation is determined by the variable e −kαλ , which according to
Euler’s Identity has the value:
i
e − jαλi = cos(−αλi ) + j sin(−αλi )
where:
Note:
[3-67]
the value αλI represents a phase rotation in radians
Because the calculations for this method are complex, particularly for
pipeline-powerline systems having numerous nodes, this method of
induced voltage calculation is provided only for reference. It will be
demonstrated by the instructor in class using spreadsheet software.
The procedure described above is now seldom used for solving complex problems
now that AC mitigation software packages are available for personal computers.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3.7
3:116
Prediction of Fault Voltages
3.7.1 Introduction
The effects of a powerline fault on a pipeline are more difficult to accurately
determine than the steady-state induced voltages, particularly because the location
and magnitude of a fault are impossible to predict. The following discussion
provides only a rudimentary analysis of fault current effects. For a more detailed
analysis, it is recommended that commercially available software be used.
3.7.2 Conductive Coupling Due to Fault Currents
The electrical power company is generally able to provide the maximum line-toground fault current IF that is available at any point along the power transmission
line. This fault current value will typically assume that the line-to-ground fault
path has an impedance of 0 Ω, whereas the fault will in fact have a finite
impedance (e.g., the footing resistance of a faulted tower ZT) that will further limit
the magnitude of the fault current. Furthermore, in the case where the powerline
has aerial shield wires or a counterpoise, not all the fault current will enter the
earth because a significant portion will return to the source (e.g., generating station
or substation) via these conductors. A simple equivalent circuit for a line-toground fault is shown in Figure 3-76.
IF
ZP
Powerline
VL-G
ZS
IFS
Shield
Wire
ZT
IFT
Tower
Figure 3-76: Equivalent Circuit for Line-to-Ground Fault
As a rough approximation, the fault current entering the earth at the tower could be
calculated by analyzing the following simple network:
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:117
I FT =
V L −G
⎛ Z ⋅Z
Z p + ⎜⎜ S T
⎝ Z S + ZT
⎛ ZS
⋅ ⎜⎜
⎞ ⎝ Z S + ZT
⎟⎟
⎠
⎞
⎟⎟
⎠
[3-68]
The impedance of the tower to earth can be calculated knowing the details of the
tower footing and the local soil resistivity. The impedance of the power
transmission system, Zp, may be provided by the power company; in cases where it
is not, a rough approximation would be to assume that the impedance is purely
reactive (i.e., phase angle = 90 degrees) and to estimate the magnitude as:
ZP =
V L −G
IF
[3-69]
When the powerline includes a shield wire and the shield wire is electrically
continuous between towers, the shield wire will return fault current to the source
and distribute fault current to adjacent structures where it may be discharged to the
earth (Figure 3-77).
IFS1’’
IFS1’
IFS1 IFS2
IFS2’
IFS2’’
Fault
IFT1’
IFT1
IFT
IFT2
IFT2’
Figure 3-77: Distribution of Fault Current along Powerline
The impedance of the shield wire ZS is difficult to determine, although it might be
supplied by the power company. The assumption that all fault current will enter
the earth at the faulted tower will result in worst-case pipe-to-earth voltages
because it results in the highest fault current densities. As a conservative
approximation, it might instead be assumed that 25 percent of the fault current
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:118
returns via the shield wires—assuming that they are electrically continuous back to
the source.
If the faulted structure is located in close proximity to the pipeline, arcing occurs,
an ionized path (i.e., an extremely low-resistance path) is created in the soil
between the two structures, and essentially all of the fault current entering the
earth is transferred to the pipeline. This represents a worst case because, not only
could the high current density at the pipe’s surface damage the pipe, the pipeline
rises to nearly the same voltage as the faulted tower. Soil ionization can occur for
a fault current If (kA) when the distance r (m) from the tower footing to the
pipeline meets one of the following criteria:
r = 0.08 I f ρ
(for ρ < 100 Ω - m)
[3-70]
r = 0.047 I f ρ
(for ρ > 1000 Ω - m)
[3-71]
If arcing does not occur, then the fault current flows radially away from the tower
footing. This produces a voltage gradient in the soil (Figure 3-78).
IFT
VT
Vr
r
Figure 3-78: Distribution of Fault Current along Powerline
In this case, the voltage of the earth at the pipeline (Vr) can be estimated by
approximating the tower footing as a hemisphere having a radius req and
calculating the voltage at a distance r away from the tower (Figure 3-79).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:119
req
Vr
r
RC’
VP
ZG
Remote Earth
Figure 3-79: Calculation of Earth Voltage at Pipe Due to Faulted Tower
The equivalent radius of the tower footing is a function of the soil resistivity ρ and
the tower-to-earth resistance RT.
req =
ρ
2πRT
[3-72]
The voltage of the tower footing is:
VT = I FT ⋅ RT = I FT ⋅
ρ
2πreq
[3-73]
Therefore, the voltage at a distance r from the tower footing is:
Vr =
req
ρ ⋅ I FT
= VT
2π r
r
[3-74]
Now, due to the resistance of the pipeline coating, the voltage of the pipeline Vp,
will be less than the voltage of the earth immediately outside the coating. It will be
determined by the following voltage divider (Figure 3-38).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:120
V P = Vr
ZG
Z G + RC′
[3-75]
where:
Vr = voltage of the earth in the vicinity of the pipe
ZG = grounding impedance of pipeline
Rc′ = modified coating resistance
The voltage across the coating is therefore:
VC = Vr − V P = Vr − Vr
⎛
⎞
ZG
ZG
⎟⎟
= Vr ⎜⎜1 −
+
Z G + RC '
Z
R
G
C' ⎠
⎝
[3-76]
The grounding impedances of a pipeline having a length L for the cases where the
fault current is injected into the end of the pipeline, or into the middle of the
pipeline, are as follows:
ZG =
Z0
⎛ ΓL ⎞
coth⎜
⎟
2
⎝ 2 ⎠
Z G = Z 0 coth (ΓL)
(center injection)
[3-77]
(end injection)
[3-78]
The resistance presented to the fault current by the coating may be linear,
depending on whether localized soil ionization occurs in the immediate vicinity of
the coating holidays. The length of pipe affected by the fault current is typically
equal to 2r, where r is the distance from the tower to the pipe (Figure 3-80).
r = distance from tower to pipeline
Affected Length of Pipe
≅ 2r
Figure 3-80: Approximate Length of Pipeline Affected by Faulted Tower
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:121
For the case where soil ionization does not occur, the resistance offered by the
coating along the affected length of pipe is:
RC′ =
rC′
2π ⋅ r ⋅ D
[3-79]
The resistance of a single holiday (Figure 3-81) having a diameter d would be:
RH =
ρ
2d
Coating Holiday
[3-80]
Soil Resistivity: ρ
d
Pipe Wall
Figure 3-81: Resistance of Coating Holiday to Earth
The number of these holidays that might exist along the affected length of pipe
would therefore be estimated based on how many holidays would be required in
parallel to account for the coating resistance R′C.
N=
RH
RC′
[3-81]
The high current densities that can arise at the holidays may cause large voltage
gradients may occur at the holidays. These gradients may be of sufficiently high
magnitude to result in localized soil ionization effects, thereby effectively
increasing the diameter of the holiday and decreasing the holiday’s resistance to
earth (Figure 3-82).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:122
Ionized soil in vicinity
of holiday as a result of
AC fault current pick-up
Breakdown Voltage of Soil:
VBD ≅ 1 MV/m to 2 MV/m
Soil Resistivity: ρ
Voltage across coating: VC
Pipe Wall
d
Figure 3-82: Modified Resistance of Coating Holiday to Earth
Due to Localized Soil Ionization Effects
The modified resistance of a coating holiday is given by:
R H′ =
ρ ⋅ V BD
2π ⋅ Vr
[3-82]
where: VBD is the breakdown voltage of soil, which typically may range from
1 MV/m to 2MV/m
The resistance of the coating when considering soil ionization therefore becomes:
RC′′ =
R H′
N
[3-83]
and the pipeline voltage and the voltage across the coating therefore become:
V P = Vr
ZG
Z G + RC′′
⎛
ZG
VC = Vr ⎜⎜1 −
⎝ Z G + RC′′
CP Interference Course Manual
© NACE International, 2006
January 2008
[3-84]
⎞
⎟⎟
⎠
[3-85]
AC Interference
3:123
3.7.3 Inductive Coupling Due to Fault Currents
During fault conditions, the voltages induced on the pipeline will increase due to
the increased current flow in the powerline—as well as to the current imbalance
between the three phases. The induced voltages along the pipeline during fault
conditions can be determined using the method in Section 3.6; however, the LEF
occurring during fault conditions must be recalculated. This requires that the
mutual impedance ZM between the faulted powerline and the pipe be determined.
Z M = j ⋅ f ⋅ μ 0 ⋅ 1n
(h − h′ + 2
ρ / j 2πfμ 0
)
2
+d2
(h + h′)2 + d 2
[3-86]
where:
f
μ0
ρ
h
h′
d
=
=
=
=
=
=
frequency (Hz)
permeability of free space
average soil resistivity (Ω-m)
average height of conductor
average depth of pipeline
mean distance from powerline to pipeline
The mutual impedance is then substituted into the following equation, along with
the powerline fault current If, to determine the average electric field strength
during fault conditions:
E 0 = I fZM
[3-87]
This field strength is then used to determine the peak voltages occurring at the
major discontinuities under fault conditions.
As an alternative to the method described above, the graph in Figure 3-83 can be
used to estimate pipeline voltage rise caused by inductive coupling with a fault
current.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:124
600
10
20
5.6
8
10
30
40
50
70
100 200 300 500
10 11.2 12.5 14.8 18
25
31
40
14
17
20 22.5 26.5 32
45
55
71
18
25
31
36
40
90 100 12.5
32
45
55
64
71
56
80
100 112 125 148 180 250 310 400
100
140 170 200 225 265 320 450 550 710
190
250 310 350 400 475 560 800 1000 1250
500
400
300
47.5 56
85 100 143 175 225
200
100
0
5
10
Pipeline-Powerline Separation (m)
15
Length of Parallelism (km)
Figure 3-83: AC Pipeline Voltages Induced by Overhead Faulted Powerline
(Per 1000 A of Fault Current)10
3.7.4 Other Related Calculations
In addition to calculating the effects of AC interference on a pipeline, other
calculations are required. They include the following:
3.7.4(a)
Ground Electrode Resistance
Resistance of a hemispherical electrode having a radius r installed at grade:
R=
ρ
2πr
[3-88]
Resistance of a circular plate electrode having a diameter D installed at grade:
10
Electricite de France (EDF) and Gaz De France (GDF). Recommendations for Protection of Steel
Pipelines against Electrical Interference, 1967.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:125
R=
ρ
2D
[3-89]
Resistance of a vertical electrode, having a diameter D and length L, installed
at grade:
R=
ρ ⎡ ⎛ 8L ⎞ ⎤
⎢ln⎜ ⎟ − 1⎥
2πL ⎣ ⎝ D ⎠ ⎦
[3-90]
ρ
4L
ln
2πL D
[3-91]
or alternatively:
R=
Resistance of a vertical electrode, installed at a depth T:
R=
⎛ 2 L 4T + 3L ⎞
ρ
⎟
ln⎜⎜
2πL ⎝ D 4T + L ⎟⎠
T, L >> D
[3-92]
Resistance of a groundbed consisting of N electrodes separated by a uniform
spacing S, each having a resistance R installed in a collinear array.
RN =
1
N
⎡
ρ ⎛1 1 1
1 ⎞⎤
⎢ R + πS ⎜ 2 + 3 + 4 + ... + N ⎟⎥
⎝
⎠⎦
⎣
S≥L
[3-93]
or, when N is large, this simplifies to:
RN =
ρ
1⎛
⎞
ln(0.66 N ) ⎟
⎜R +
N⎝
πS
⎠
S≥L
[3-94]
Resistance of a horizontal electrode, installed at a depth T:
R=
or alternatively:
CP Interference Course Manual
© NACE International, 2006
January 2008
⎛ L2 ⎞
ρ
⎟
ln⎜⎜
2πL ⎝ TD ⎟⎠
T, D << L
[3-95]
AC Interference
3:126
R=
ρ ⎛
2L
⎞
− 1⎟
⎜ ln
πL ⎝
T ⋅D
⎠
T << L
[3-96]
Resistance of a vertical electrode, installed in a two-layer soil where the
electrode does not penetrate the lower layer:
nh ⎤
⎡
+ 1⎥
∞
ρ1 ⎢ 8 L
kn
L
−
+
R=
ln
1
ln
⎢
⎥
∑
nh ⎥
2πL ⎢ D
n =1 2
−1
⎥⎦
L
⎣⎢
where:
[3-97]
ρ1 = upper layer resistivity
ρ2 = lower layer resistivity
h = upper layer height
k = reflection factor
k=
ρ 2 − ρ1
ρ 2 + ρ1
[3-98]
Resistance of a horizontal electrode installed in the upper layer of a two-layer
soil:
2
⎡
⎤
⎛ 2nh ⎞
⎢
⎥
+
+
1
1
⎜
⎟
2
ρ1 ∞ n ⎢
8nh
⎥
⎝ L ⎠
⎛ 2nh ⎞
+
−4 ⎜
R=
k ⎢4 ln
⎟ + 1⎥
∑
2nh
2πL n =1
L
⎝ L ⎠
⎢
⎥
L
⎢
⎥
⎣
⎦
3.7.4(b)
h,L >> D
[3-99]
Step and Touch Potential
The voltage at a distance x from the outside of a loop of wire located at grade,
having a radius r, discharging a current I into the earth:
V ( x) =
CP Interference Course Manual
© NACE International, 2006
January 2008
Iρ ⎡ −1 r ⎤
sin
x + r ⎥⎦
2πr ⎢⎣
[3-100]
AC Interference
3:127
Similarly, in a two-layer soil, this becomes:
∞
Iρ1 ⎡ −1 r
⎢sin
V ( x) =
+ 2∑ k n sin −1
x+r
2πr ⎢
n =1
⎣
3.7.4(c)
2r
(2nh )2 + x 2
+
(2nh )2 + (x + 2r )2
⎤
⎥
⎥⎦
[3-101]
Conductor Size
The minimum required conductor size (in circular mils) to prevent fusing
during a fault:
A = 197 ⋅ I
tc α r ρr
⎛
⎜
Tm − Ta
T CAP 1n ⎜1 +
⎜
1
− Tr + Ta
⎜
αr
⎝
⎞
⎟
⎟
⎟
⎟
⎠
[3-102]
where:
tc = fault duration (s)
αr = thermal coefficient of resistivity
ρr = conductor resistivity (μΩ-cm)
Tm = maximum allowable temperature (ºC)
Ta = ambient temperature (ºC)
Tr = reference temperature (ºC)
TCAP = thermal capacity (joules/cc/ºC)
I = fault current (A)
Note that for copper conductors at 20ºC, this formula simplifies to:
A = 6.83I t c
3.8
[3-103]
Equipment for AC Mitigation
3.8.1 DC Decoupling Devices
An important component of most AC mitigation systems is the DC decoupling
device, which permits the flow of AC but blocks the flow of DC. Consider the
case of a motor-operated valve on a pipeline, which must be electrically grounded
for operational reasons and to satisfy the local electrical codes. As Figure 3-84
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:128
shows, electrical ground provides a low-resistance path to drain induced AC
currents to earth—thereby lowering the induced AC pipeline voltages; however, it
also needlessly picks up CP current intended for the pipeline itself. Therefore, CP
current requirements increase, CP potentials decrease (both locally at the valve site
and possibly elsewhere along the pipeline), and CP attenuation increases.
M
Induced
AC Current
Induced
AC Current
CP Current
Figure 3-84: Motor Operated Valve – Effects of Grounding on
Induced AC and CP Currents
One solution to this problem is to electrically isolate the valve from the pipeline
(Figure 3-85). When this is done, a bond must be installed across the valve to
maintain electrical continuity along the pipeline for CP purposes and to prevent
the generation of an induced AC voltage peak.
This approach solves the CP problems, but the pipeline has perhaps lost an
important AC mitigation facility and pipeline voltages may consequently increase.
The solution also requires that the insulators be above-grade because buried
insulators may not be as effective and would be subject to stray current
interference. If the valve is below-grade, it would now require its own separate
CP system because it is isolated from the pipeline’s CP system. Finally, whenever
insulators are installed on a pipeline that is exposed to induced AC interference
there exists a risk that the insulators may be damaged as a result of fault currents.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:129
M
CP Current
Figure 3-85: Electrical Isolation of Motor-operated Valve from Pipeline
Rather than isolate the valve from the pipeline, a preferred solution would be to
install a DC decoupling device between the valve and electrical ground. This
would provide AC continuity but break the DC current path.
Consider the electrical grounding schematic of a motor-operated valve (Figure 386). Installing a DC decoupling device in the ground connection between the
electrical service entrance and the valve allows the valve to become isolated from
the service entrance ground and secondary grounding system (perhaps a copper
loop and some ground rods) and the extensive primary grounding system owned
by the power company (consisting of pole grounds, substation grids, connections
to watermains, etc).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:130
Service
Entrance
Distribution
Transformer
Line
Line
Fuse
Neutral
Arrestor
DC
Decoupler
Motor
Operated
Valve
Line
Primary
Neutral
Secondary
DC
Decoupler
Primary
Ground
Secondary
Ground
Service
Entrance
Ground
Figure 3-86: Electrical Grounding Schematic of Motor Operated Valve
Showing Two Alternative Locations for a DC Decoupling Device
As an alternative, the DC decoupling device may also be installed between the
primary and secondary grounding systems (Figure 3-87). This has the advantage
of being able to isolate several grounded pipeline components in a station with a
single DC decoupling device, although the local secondary grounding system
would still be connected to the piping and would pick up some CP current.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:131
Figure 3-87: Decoupling Device Installed by Electrical Utility
Between Primary and Secondary Grounds
The most reliable DC decoupling devices, which are also the most commonly used
today, are solid-state devices such as the one shown in Figure 3-88. These devices
have a very high DC impedance, a very low AC impedance, and can pass steadystate AC currents as well as lightning and fault currents. These devices are selfpowered.
Although the internal construction of these devices may vary depending upon the
particular manufacturer and the device requirements, the device may include the
components shown in Figure 3-89. Steady-state AC current passes through the
electrolytic capacitor. AC fault currents pass through the thyristors. The surge
protector passes lightning currents. The inductor prevents the lightning currents
from damaging the capacitor and thyristors.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:132
Figure 3-88: Isolation-Surge Protector Installed across Isolating Flange
Electrolytic Capacitor
– +
Gate
Thyristor
Thyristor
Inductor
Gate
Surge Protector
–
+
Figure 3-89: Electrical Schematic of One Model of Solid-State DC Decoupling Device
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:133
DC decouplers may also be installed directly across insulating flanges to provide
protection against lightning and fault current damage. Note, however, that the
connections must be kept as short as possible (Figure 3-90) to provide protection
against lightning. Otherwise, the voltage drop created across the inductance
reactance of the lead wires alone may be enough to break down the insulator.
Figure 3-90: DC Decoupling Device Installed across Insulating Flange for Lightning Protection
Solid-state DC decouplers are reported to have a very low failure rate; should one
fail, however, it will fail in the short-circuit mode. This is considered to be the
fail-safe mode from an AC safety viewpoint, but it will be detrimental to the CP
system.
Prior to the advent of solid-state DC decouplers, the polarization cell (Figure 3-91)
was used to pass steady-state and fault AC currents—as well as lightning
currents—while maintaining DC isolation. The polarization cell consists of a
series of nickel or stainless steel plates immersed in an alkaline hydroxide
solution, such as the one that appears in Figure 3-92.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:134
Figure 3-91: AC Current Being Measured Through a Polarization Cell
O
Ho Ho
O
O
Ho
O
Ho
O
Ho
O
KOH
Ho
Figure 3-92: Polarization Cell Construction
Depending upon its construction (the size, number, and spacing of the plates), the
polarization cell is capable of carrying fault currents of tens of thousands of
amperes. It has a very low AC impedance, which is typically in the 0.1-mΩ range.
Initially, the cell also has a low DC resistance; but, as CP current passes through
the cell, anodic and cathodic polarization of the plates occurs and a DC backvoltage develops.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:135
Although the polarization cell and the solid-state DC decoupler perform similar
functions, the polarization cell has several disadvantages. Under steady-state AC
load the plates tend to depolarize, allowing a significant amount of DC to pass
through the cell. This reduces the effectiveness of the DC isolation that the cell is
attempting to maintain, thereby reducing the effectiveness of the CP system.
Moreover, it results in corrosion of the anodic plates inside the cell. As the plates
corrode, the cell’s AC impedance increases. In severe cases, the cell may fail
entirely.
Figure 3-93: Corrosion of Plates within a Polarization Cell
Simpler and less costly alternatives exist to the solid-state DC decouplers and
polarization cells discussed above; however. these also tend to be less effective.
The zinc grounding cell is similar in appearance to a packaged sacrificial zinc
anode, except that two zinc electrodes are installed side-by-side inside the anode
package and are separated by insulating blocks (Figure 3-94). The lead wires from
the zinc electrodes are installed on opposite sides of a pipeline insulator. The lowresistivity anode backfill, when saturated, provides a low-resistance path between
the two zinc electrodes—on the order of 0.03 Ω, which provides a reasonably lowimpedance path for AC. As CP current flows from the unprotected side of the
flange, through the grounding cell, and back to the protected piping, the zinc
electrode polarizes cathodically and thereby limits the amount of DC that can flow
through the cell. However, in order to develop a significant back voltage across
the insulator of 0.5 V, a substantial amount of DC is required—on the order of 500
mA—that compromises the effectiveness of the insulator. Furthermore, a steadyCP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:136
state AC load allows a significant amount of DC to pass through the cell, leading
to the premature consumption of the anodic electrode and the eventual open-circuit
failure of the cell; this results in an AC safety hazard.
Cathodically protected
side of insulator
This electrode polarizes
cathodically and resists
the flow of direct current
Insulating flange
Grounding cell consisting of
two - 5 ft. long zinc anodes
separated by insulating
blocks and surrounded with
low resistivity backfill
Figure 3-94: Grounding Cell
Another alternative for passing steady-state AC is the use of an electrolytic
capacitor (a component of the solid-state DC decoupler). The capacitor can be
connected between the pipeline and a ground electrode, such as a pipeline casing
(Figure 3-95).
Figure 3-95: Electrolytic Capacitor
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:137
Because the electrolytic capacitors are polarity-sensitive, the negative terminal
must be connected to the more electro-negative structure (i.e., the pipeline). In
cases where this polarity may reverse (such as in DC stray current areas) and when
the capacitor is carrying AC, capacitors have been known to explode and/or catch
fire (Figure 3-96).
Figure 3-96: Failure of Electrolytic Capacitors in Stray Current Area
Capacitors generally fail in short-circuit mode, which is the fail-safe condition
from an AC safety viewpoint but which can be detrimental to the CP system.
Capacitors are also susceptible to damage from electrical transients and benefit
when they are paralleled with surge protectors, such as metal-oxide varistors
(Figure 3-97).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:138
Figure 3-97: Metal-Oxide Varistors (MOVs)
Note that in cases where the pipeline casing is used as an AC ground electrode, the
vent pipes (if applicable) will rise to the same AC voltage as the pipeline. Hence
precautions must be taken to ensure that the public is protected from exposure to
these voltages (e.g., cutting the vent pipes off below-grade).
Solid-state devices are also available for installation across insulators to protect the
insulator from transients. Such devices may be explosion-proof (Figure 3-98) and
will conduct both AC and DC when a predetermined voltage limit is exceeded
(e.g., +1V/-2V, +4V/-4V). Note, however, that such devices may not be
appropriate for areas where steady-state induced AC voltages are present because
any voltage higher than the voltage limit will cause the device to conduct—
thereby compromising the effectiveness of the insulator.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:139
Figure 3-98: Explosion-Proof Surge Protection Device Installed across Insulator
3.8.2 Test Stations
When a pipeline is exposed to induced AC voltages, the test leads at CP test
stations can potentially expose pipeline personnel—as well as the public—to
hazardous voltages. Test station selection is therefore an important consideration
when designing an AC mitigation system.
Figure 3-99 shows a number of different test station types. A test station in which
the test lead terminals are exposed is obviously the poorest choice where induced
AC voltages are present. Such a test station would also be a poor choice for CP
purposes because the test leads could contact foreign metallic structures such as
fences.
The vast majority of commercially available test stations include a cover, thereby
limiting the chance of contacting the test lead terminals. In some cases these
covers can be easily removed, whereas a better choice in an area subject to AC
interference would be a cover that incorporates a locking device. Such locking
devices are not tamper-proof, however, and should not be relied upon to prevent
public access to hazardous voltages.
The safest test station choice, from a public safety point of view, is one in which
the cover can be padlocked. The terminals inside such a test station should be of
dead-front design to prevent accidental contact with AC voltages on the test leads
by authorized personnel.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:140
Figure 3-99: Test Station Varieties (left to right): a) Terminals Exposed to Public;
b) Terminals Covered by a Plastic Cap (Locking or Non-Locking);
c) Dead-Front Terminals; d) Aluminum Test Station with Padlocked Cover
3.8.3 Sacrificial Anodes
An important consideration when selecting anodes for CP and/or AC mitigation on
a pipeline subject to steady-state induced AC interference is the effect that the AC
current may have on the anode consumption rate. Consumption rates of both zinc
and magnesium anodes increase with increasing current density.
Sacrificial anodes are generally installed in wettable packages containing special
backfill. In some cases, the anode may be installed as a continuous ribbon (Figure
3-100). This ribbon is often installed directly in the pipe trench without special
backfill, but in some cases (such as where bicarbonates are present in the soil) the
anode’s surface may passivate—causing its resistance to increase and rendering it
ineffective as both a sacrificial anode and a ground electrode. Figure 3-101
illustrates the effect of a bicarbonate-rich soil on the potential of zinc and the
subsequent reactivation of the zinc’s surface with the addition of calcium sulfate
(CaSO4).
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:141
Figure 3-100: a) Zinc Ribbon Anodes of Various Sizes;
b) Zinc Ribbon Being Installed in Pipe Trench
-1.10
-1.00
-0.90
-0.80
Original Environment
-0.70
600 ppm HCO2
73 ppm NO3
20 ppm CO3-2
-0.50
Room Temperature
Saturated CaSO4
Added As Gypsum
-0.50
-0.40
0
20
40
60
80
TIME - DAYS
Figure 3-101: Effect of Gypsum on Restoration of Zinc Potential in Bicarbonate-Rich Soil
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:142
In the case of magnesium anodes, AC causes the potential of magnesium to shift in
the electropositive direction (Figure 3-102) and could even become electropositive
with respect to the pipeline. This can be prevented by ensuring that the AC
current density at the anode’s surface is maintained below 10 A/m2 (1 A/ft2).
-1400
1 day
5 days
9 days
-1200
-1000
-800
-600
-400
-200
0
200
0
0
100
155
200
310
300
465
400
620
500 mA/in2
775 A/m2
AC Current Density
Figure 3-102: Potential of Magnesium Versus AC Current Density in a Fe-Mg Cell
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:143
Group Activity – AC Mitigation System Design
Introduction:
The students shall break into groups, with each group preparing a design for
a pipeline AC mitigation system. The students shall be given 60 minutes to
prepare their designs, and 30 minutes will be available to present their
designs to the class.
Required Materials:
2-layer resistivity master curves
Transparent log-log graph paper
AC mitigation spreadsheet
Laptop computer
Course text
Problem:
A pipeline parallels a pipeline for a distance of L = 20 km at a constant separation
distance of 15 m, as shown in Figure 1. The powerline has the geometry shown in
Figure 2, where the spacing s between conductors is 5 m and the average height h
of the conductors is 15 m. The powerline carries a maximum steady-state current
of 1000A per phase and has a line-to-ground fault level of 20,000A.
The pipeline has a diameter of 500 mm and is buried at a depth of 1.5 m. The pipe
is coated with extruded polyethylene, which is considered to be an excellent
coating, requiring a CP current density of 0.1 mA/m2. Assume that only 20-pound
high-potential magnesium anodes are available for this project and that these are
1.5 m in length and 125 mm in diameter.
A 50-m-long insulated wire was laid out along the pipeline route and was
grounded at one end. The AC voltage to ground measured at the opposite end was
found to be 0.6V.
Soil resistivities along the pipeline route are typically 5000 Ω-cm and are
generally uniform with depth—except at Location “C” (Figure 1), where a Wenner
4-Pin survey produced the following data:
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:144
Soil Resistivity Data
Pin Spacing
Resistivity (Ω-cm)
2m
88,000
4m
55,000
6m
29,000
8m
16,000
10 m
10,000
Pipeline
A
B
C
L
d
Powerline
Figure 1 - Pipeline/Powerline Route
s
s
h
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:145
Figure 2 - Powerlne Geometry
Tasks:
1) Determine the steady-state induced voltages on the pipeline at locations A, B, and C.
2) Design an AC mitigation system to satisfy the objectives as discussed in this course.
3) Determine the results of this mitigation system on induced voltages.
4) Present the findings to the class.
Note: In order to produce a variety of solutions, one group should be assigned the case
where both insulators are intentionally shorted and one group should be assigned the case
where only the insulator at “A” is shorted.
CP Interference Course Manual
© NACE International, 2006
January 2008
AC Interference
3:146
Summary of Equations
C=
[3-1]
Q
coulombs/volt
V
A
d
page 3-3
1
2πfC
page 3-4
C=ε
[3-2]
XC =
[3-3]
Amean =
[3-4]
A1 × A2
V pipe
page 3-6
AC1 =
0.2m 2 × 5m 2 = 1m 2
AC 2 =
5m 2 × 20m 2 = 10m 2
V pipe =
[3-5]
page 3-3
C1
V powerline
C1 +C s
page 3-7
0.9 × 10 −12
=
100 × 10 3 V = 1000V
−12
−12
+ 90 × 10
0.9 × 10
[3-6a]
[3-6b]
[3-7]
CP Interference Course Manual
© NACE International, 2006
January 2008
VS
N
= S
Vp
Np
Vp
Np
=
VS
NS
v(t ) = Vm cos (ωt + φ)
page 3-19
page 3-19
page 3-24
AC Interference
3:147
[3-8]
ω = 2πf
[3-9]
V = V∠φ
page 3-25
[3-10]
Α∠φ × Β∠θ = Α ⋅ Β∠( φ + θ)
page 3-28
[3-11]
Α∠φ ÷ Β∠θ = Α ÷ Β∠( φ − θ)
page 3-28
[3-12]
A = x + jy
page 3-29
[3-13]
x = ⏐A⏐cosφ
page 3-29
[3-14]
y = ⏐A⏐sinφ
page 3-29
[3-15]
j = −1
page 3-29
[3-16]
j = 1/90º
page 3-29
[3-17]
A/φ × j = A/φ × 1/90º = A/φ + 90º
page 3-29
[3-18]
A/φ × (-j) = A/φ × -1/90º = -A/φ + 90º = A/φ – 90º
page 3-29
[3-19]
A/φ ÷ j = A/φ ÷ 1/90º = A/φ – 90º
page 3-30
XC =
[3-20]
[3-21]
[3-24]
1
j 2πfC
page 3-30
V
V
= j 2πfCV = 2πfCV∠90°
=
XC
⎛ 1 ⎞
⎟⎟
⎜⎜
⎝ j 2πfC ⎠
IC =
X L = j 2πfL
[3-22]
[3-23]
page 3-24
IL =
Vφ −φ
=
CP Interference Course Manual
© NACE International, 2006
January 2008
page 3-32
V
V
V
=
=
∠ − 90°
XL
j 2πfL
2πfL
1.5 2 + (−.866) ⋅ Vφ −G
2
page 3-30
=
3 Vφ −G
page 3-32
page 3-34
AC Interference
3:148
VO, L = ±
[3-25]
[3-27]
IB =
[3-28]
IB =
0.157
ts
0.116
ts
R =
page 3-49
2
VO, L = ±
[3-26]
[3-29]
E ⋅L
E
page 3-54
Γ
(70 kg body)
page 3-62
(50 kg body)
page 3-62
ρ
2D
page 3-65
[3-30]
R2Fp = 1.5ρ
page 3-65
[3-31]
R2Fss = 6ρ
page 3-65
[3-32]
V = R×I
page 3-65
[3-33]
V = ( Rbody + Rfeet) × Ibody
page 3-65
0.116
[3-34]
Vstep50 = (1000 + 6ρ)
[3-35]
Vtouch50 = (1000 + 1.5ρ)
[3-36]
Vstep70 = (1000 + 6ρ)
[3-37]
Vtouch70 = (1000 + 1.5ρ)
[3-38a]
CP Interference Course Manual
© NACE International, 2006
January 2008
tS
0.116
tS
0.157
tS
Vss = Iss × Rbody
0.157
tS
page 3-65
page 3-65
page 3-66
page 3-66
page 3-67
AC Interference
3:149
iAC =
[3-38b]
8VAC
ρπd
page 3-74
[3-39a]
r = 0.08 I f ⋅ ρ
( ρ < 100 Ω - m)
page 3-93
[3-39b]
r = 0.047 I f ⋅ ρ
( ρ > 1000 Ω - m)
page 3-93
V AC
L
page 3-98
V
I
page 3-99
[3-42]
r′c= R ⋅ A
page 3-102
[3-43]
r′cc = ρ ⋅ L / A
page 3-103
[3-40]
LEF =
[3-41]
ρ a = 2πa
Rc ( Ω ) =
[3-44]
rc′ (Ω ⋅ m 2 )
rc′
=
2
πDL
A pipe (m )
page 3-104
[3-45]
Gc =
πDL
1
=
Rc
rc′
page 3-104
[3-46]
gc =
Gc
πD
=
L
rc′
page 3-104
[3-47]
Zi =
⎧ [sinh (t n ) + sin (t n )] + j [sinh (t n ) − sin (t n )]⎫
⎬
(2π)(0.0127 D ) ⎨⎩
cosh (t n ) − cos(t n )
⎭
0.5ωμ s ρ s
[3-48]
[3-49]
CP Interference Course Manual
© NACE International, 2006
January 2008
tn =
0.036t ωμ s
ρs
page 3-105
page 3-105
page 3-105
AC Interference
3:150
⎡
1.12 ⎤
⎡
⎤
1n
⎢
⎥
j
1.85
ωμ
2 1
′
⎥
⎢
0
Γa
Γ⎢ +
•1n
⎥ = Zi +
−1
2
−
1
⎢ a′ Γ + jωμ ρ + jωε ⎥
2π
)⎦
⎢Yi π (ρ + jωε)⎥
0(
⎣
⎣
⎦
a′ =
[3-50]
[3-52]
Z0
[3-53]
α = ⏐Γ⏐cos(∠Γ)
⎡
1.12 ⎤
1n
⎢1
Γ a′ ⎥
= Γ⎢ +
⎥
−1
⎢Yi π (ρ + jωε)⎥
⎣
⎦
page 3-106
page 3-106
page 3-108
E3φ = IA ⋅ ZMA + IB ⋅ ZMB + IC ⋅ ZMC + IS1 ⋅ ZMS1 + IS2 ⋅ ZMS2
Z M = j ⋅ f ⋅ μ 0 ⋅ 1n
[3-56]
(h − h′ + 2
ρ / j 2πfμ 0
) +d
2
page 3-108
2
page 3-108
(h + h′)2 + d 2
E = E1 + E2 + E3 + … + EN
[3-54]
Vx =
page 3-106
E = I φ ⋅ ZM
[3-54]
[3-58]
page 3-106
α = Re[Γ]
[3-51]
[3-55]
0.25 D 2 + 4h 2
{[
]
[
page 3-109
]
page 3-111
E0 Z 2 (Z1 − Z 0 ) − Z1 (Z 2 + Z 0 )e ΓL e −Γx − Z1 (Z 2 − Z 0 ) − Z 2 (Z1 + Z 0 )eΓL e Γ( x−L )
Γ (Z1 + Z 0 )(Z 2 + Z 0 )eΓL − (Z1 − Z 0 )(Z 2 − Z 0 )e −ΓL
[
[3-59]
[3-60]
CP Interference Course Manual
© NACE International, 2006
January 2008
ZG = Z0 coth (ΓL)
Y AT =
N
RA
]
}
page 3-112
page 3-112
AC Interference
3:151
Y AT
N
1
=
=
L
L ⋅ RA S ⋅ RA
[3-61]
Y M = Yi +
[3-62]
page 3-113
1
S ⋅ RA
page 3-113
N
V = P0 ∑ E Si ni e − jαλ i
[3-63]
page 3-113
i =1
P0 =
[3-64]
1
2Γ
page 3-113
[3-65]
ESi = ELi – ERi
page 3-113
[3-66]
ni = 10 kαλ i
page 3-114
[3-67]
e − jαλi = cos(−αλi ) + j sin( −αλi )
page 3-114
[3-68]
I FT =
V L −G
⎛ Z ⋅Z
Z p + ⎜⎜ S T
⎝ Z S + ZT
ZP =
[3-69]
[3-70]
r = 0.08 I f ρ
[3-71]
r = 0.047 I f ρ
⎛ ZS
⋅ ⎜⎜
⎞ ⎝ Z S + ZT
⎟⎟
⎠
V L −G
IF
page 3-116
page 3-116
(for ρ < 100 Ω - m)
page 3-117
(for ρ > 1000 Ω - m)
page 3-117
ρ
2πRT
[3-72]
req =
[3-73]
VT = I FT ⋅ RT = I FT ⋅
CP Interference Course Manual
© NACE International, 2006
January 2008
⎞
⎟⎟
⎠
page 3-118
ρ
2πreq
page 3-118
AC Interference
3:152
Vr =
[3-74]
V P = Vr
[3-75]
[3-76]
[3-77]
[3-78]
req
ρ ⋅ I FT
= VT
2πr
r
VC = Vr − V P = Vr − Vr
ZG =
ZG
Z G + RC′
[3-80]
[3-81]
[3-82]
[3-83]
[3-84]
[3-85]
CP Interference Course Manual
© NACE International, 2006
January 2008
page 3-119
⎛
⎞
ZG
ZG
⎟⎟
= Vr ⎜⎜1 −
+
Z G + RC '
Z
R
G
C' ⎠
⎝
Z0
⎛ ΓL ⎞
coth⎜
⎟
2
⎝ 2 ⎠
page 3-119
(end injection)
page 3-119
rC′
2π ⋅ r ⋅ D
ρ
RH =
2d
RC′ =
page 3-120
page 3-120
ρ ⋅ V BD
2π ⋅ Vr
page 3-121
R H′
N
page 3-121
RC′′ =
V P = Vr
page 3-120
RH
RC′
N=
R H′ =
page 3-119
(centre injection)
Z G = Z 0 coth (ΓL)
[3-79]
page 3-118
ZG
Z G + RC′′
⎛
ZG
VC = Vr ⎜⎜1 −
⎝ Z G + RC′′
page 3-121
⎞
⎟⎟
⎠
page 3-121
AC Interference
[3-86]
3:153
Z M = j ⋅ f ⋅ μ 0 ⋅ 1n
(h − h′ + 2
ρ / j 2πfμ 0
)
2
+d2
(h + h′)2 + d 2
E 0 = I f ZM
[3-87]
page 3-122
page 3-122
[3-88]
R=
ρ
2πr
page 3-123
[3-89]
R=
ρ
2D
page 3-124
ρ ⎡ ⎛ 8L ⎞ ⎤
⎢ln⎜ ⎟ −1⎥
2πL ⎣ ⎝ D ⎠ ⎦
page 3-124
ρ
4L
ln
2πL D
page 3-124
R=
[3-90]
R=
[3-91]
[3-92]
[3-93]
[3-94]
R=
RN =
⎛ 2 L 4T + 3L ⎞
ρ
⎟
ln⎜⎜
2πL ⎝ D 4T + L ⎟⎠
1 ⎞⎤
ρ ⎛1 1 1
1 ⎡
R+
⎜ + + + ... + ⎟⎥
⎢
N⎣
πS ⎝ 2 3 4
N ⎠⎦
RN =
[3-97]
ρ
1⎛
⎞
ln(0.66 N ) ⎟
⎜R +
N⎝
πS
⎠
⎛ L2 ⎞
ρ
⎟
ln⎜
R=
2πL ⎜⎝ TD ⎟⎠
[3-95]
[3-96]
T, L >> D
R=
S≥L
T, D << L
2L
ρ ⎛
⎞
− 1⎟
⎜ ln
πL ⎝
T ⋅D
⎠
T << L
nh ⎤
⎡
+ 1⎥
n
∞
⎢
ρ1
k
8L
L
− 1 + ∑ ln
R=
⎢ln
⎥
nh ⎥
2πL ⎢ D
n =1 2
−1
⎢⎣
⎥⎦
L
CP Interference Course Manual
© NACE International, 2006
January 2008
S≥L
page 3-124
page 3-124
page 3-124
page 3-124
page 3-125
page 3-125
AC Interference
3:154
k=
[3-98]
ρ 2 − ρ1
ρ 2 + ρ1
page 3-125
page 3-125
[3-99]
⎡
⎤
⎛ 2nh ⎞
⎢
⎥
1
1
+
+
⎜
⎟
2
ρ1 ∞ n ⎢
8nh
⎥
⎝ L ⎠
⎛ 2nh ⎞
R=
k ⎢4 ln
+
−4 ⎜
⎟ + 1⎥
∑
2nh
L
2πL n =1
⎝ L ⎠
⎢
⎥
L
⎢
⎥
⎣
⎦
2
V ( x) =
[3-100]
Iρ ⎡ −1 r ⎤
sin
2πr ⎢⎣
x + r ⎥⎦
page 3-125
page 3-126
[3-101]
V ( x) =
[3-102]
h,L >> D
∞
Iρ1 ⎡ −1 r
⎢sin
+ 2∑ k n sin −1
2πr ⎢
x+r
n =1
⎣
A = 197 ⋅ I
[3-103]
CP Interference Course Manual
© NACE International, 2006
January 2008
2r
(2nh )2 + x 2
+
(2nh )2 + (x + 2r )2
tc α r ρr
⎛
⎜
Tm − Ta
T CAP 1n ⎜1 +
⎜
1
− Tr + Ta
⎜
αr
⎝
A = 6.83I t c
⎞
⎟
⎟
⎟
⎟
⎠
⎤
⎥
⎥⎦
page 3-126
page 3-126
CHAPTER 4
TELLURIC CURRENT INTERFERENCE
4.1 Background Theory
Telluric currents are currents that are geomagnetically induced in the earth and in
metallic structures on the earth—such as powerlines and pipelines—as a result of
the interaction of solar particles on the earth’s magnetic field (Figure 4-1). Here
the earth’s magnetic filed is compressed on the sun side of the earth and stretched
on the dusk side. The solar plasma arises from two solar phenomena: sun spot
activity and corona mass ejections (CME), which are commonly referred to as
solar flares. The geomagnetic storms that result from the interaction of the solar
plasma with the earth’s magnetic field cause currents to be induced in the earth
and metallic structures on the earth.
Figure 4-1: Interaction of Solar Particles on the Earth’s Magnetic Field
Source: Place, Trevor and Sneath, T. Owen, Practical Telluric Compensation for Pipeline Close-Interval Surveys, NACE
Corrosion 2000, Paper No. 741, Orlando, Florida, March 2001 (Powerpoint Presentation) (MP, Vol. 40(9), 2001 p.22
Charged solar particles, composed mostly of electrons and protons that enter the
earth’s atmosphere, are deflected by the earth’s magnetic field. This creates
current rings in the ionosphere centered around the north and south poles as well
as at the equator (figures 4-2a and 4-2b). Electrons are deflected in one direction
and protons are deflected in the opposite direction around the earth. This creates
a current as the earth’s magnetic field narrows on the dark side of the earth.
CP Interference Course Manual
© NACE International, 2006
January 2008
Telluric Current Interference
Figure 4-2a: Plasma Charge Distribution around the Earth during Quiescent Period
Source: Lerner, Eric J., Storms and Hurricanes Don’t Leave Off Where the Atmosphere Ends. Space,
Discover, August 1995, p.60
Figure 4-2b: Plasma Charge Distribution around the Earth during a Magnetic Storm
Source: Lerner, Eric J., Storms and Hurricanes Don’t Leave Off Where the Atmosphere Ends. Space,
Discover, August 1995, p.60
CP Interference
© NACE International, 2006
January 2008
4:2
Telluric Current Interference
4:3
The current ring in the auroral regions forms an oval as shown in Figure 4-3. This
“electrojet,” as it is sometimes called, typically contains more electrical charges
than are generated by man on earth.
Figure 4-3: This plot shows the extent and position of the auroral oval in the northern hemisphere,
extrapolated from measurements taken during the most recent polar pass of the NOAA POES
satellite for September 16, 2004 at 14:22 UT.
Source: http://www.sel.noaa.gov/pmap/pmapN.html - 9/16/2004
Because of the amplitude variation and directional changes in this electrojet
current, a changing magnetic field is produced that induces an electric field in the
earth and in any metallic conductor on or in the earth’s surface (Figure 4-4).
Varying Magnetic Field
Figure 4-4: Schematic of Geomagnetic Induction Directly into a Pipeline and the
Resulting Change in Pipeline Potential that is Produced
Source: Boteler, D.H., Gummow, R.A. and Rix, B.C., Evaluation of Telluric Current Effects on the Maritimes and
Northeast Pipeline, NACE Northern Area Eastern Conference, Ottawa, October 1999, Paper No. 8A.3, p. 8
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:4
Measured
Pipe-to-Soil Potential
Calculated
Electric Field
Measured
Magnetic Field
The effect of the changing magnetic field caused by the electrojet, which creates
both a changing electric field and a corresponding change in the pipe-to-soil
potential on a pipeline, is shown in Figure 4-5.
Figure 4-5: Quiet Day Variation in the Geomagnetic Field and the Associated Change in the
Electric Field and the Pipe-to-Soil Potential
Source: Trichtchenko, L. et al, The Production of Telluric Current Effects in Norway, NACE Corrosion 2001, Houston,
TX, March 2001, Paper No. 314
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:5
The longer variations in these three parameters are a result of the night/day effect
of the earth’s rotation. The short variations (i.e., minutes to hours) are a result of
the variation of solar particles interacting with the earth’s magnetic field. It
should be noted that this data was obtained during a quiet geomagnetic period on
a pipeline in Norway located at approximately 60 degrees geogmagnetic latitude.
For a long pipeline subjected to an induced electric field, the induced voltage and
current profile is typically as shown in Figure 4-6.
10
15
E = 1 V/km
5
10
0
5
-5
-10
0
20
40
60
80
0
100
Distance (km)
Figure 4-6: P/S Potential and Telluric Current in a Long Pipeline Exposed
to an Induced Electric Field of 1 V/km,
having an Impedance of 0.1 Ω /km and an Admittance of 0.15 Ω /km
Source: Boteler, D.H. and Seager, W.H., Telluric Currents: A Meeting of Theory and Observation, NACE Canadian
Region, Western Conference, Edmonton, Alberta, Feb. 1997.
This figure shows that for a long coated pipeline ungrounded at the ends, and
subjected to an electric field of 1 V/km, the induced voltage reaches a peak at the
end points and decreases with distance from either end toward the center and the
voltage reaches zero in the middle of the pipeline. Note that the voltage to earth
(pipe-to-soil potential) at each end is out of phase (i.e., when one end is positive,
the opposite end is negative).
Conversely, the current induced into the pipe is near zero at each end of the
ungrounded pipe but reaches a maximum in the middle. This produces the
counter-intuitive result that where the voltage peaks are greatest the current in the
pipe is the least.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:6
4.1.1 Distributed Source Transmission Line Equations
The induced voltage profile can be calculated using distributed source
transmission line (DSTL) equations, as has been shown by Boteler and
Cookson[1] using an electrical model of the pipeline shown in Figure 4-7.
E
R
L
Vind
G
C
Figure 4-7: Equivalent Circuit for a Short Section of Pipeline
Each short section of pipeline is represented by a series impedance Z where
Z = R + jwL, and a parallel admittance Y where Y = G + jwC and an induced
electric field E represented by a voltage source.
The response of the pipeline depends on the propagation constant γ and
characteristic impedance Z0 given by:
γ =
Z0 =
ZY
[4-1a]
Z
Y
[4-1b]
The voltage and current along the pipeline are then given by:
dV
dx
dI
dx
1
= E − 1Z
[4-2]
= − VY
[4-3]
Boteler, D.H. and Cookson, M.J., Telluric Currents and Their Effects on Pipelines in the Cook Strait
Region of New Zealand, Materials Performance, Vol. 25(3), March. 1986, p.27-32.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:7
Differentiation and substitution leads to the equations:
d2V
− γ 2V =
dx 2
d 2I
dx 2
dE
dx
[4-4]
− γ 2 I = − YE
[4-5]
If the disturbance is uniform along the pipe, then the electric field does not vary
with distance (i.e.,
dE
= 0 ) and these equations then have solutions of the form:
dx
I =
E
γE 0
V =
( 1 + Ae
E
γ
( Ae
- γ ( x − x1 )
-γ ( x − x1 )
+ Be - γ ( x2 − x1 )
− Be -γ ( x2 − x1 )
)
)
[4-6]
[4-7]
where A and B are constants determined by the conditions at the ends of the
pipeline. For a long pipeline, of length L, terminated at ends 1 and 2 by
impedances to ground Z1 and Z2 respectively, this becomes
I =
V
V
E
− 1 e - γx − 2 e - γ ( L − x )
Z0
Z0
Z
V(x) = − V1e - γx + V2 e - γ ( L − x )
[4-8]
[4-9]
where:
V1
=
Z1
E
×
γ Z 0 + Z1
and
V2
=
Z2
E
×
γ Z0 + Z2
[4-10]
Reviewing these calculations and Equation 4-10, it is apparent that the magnitude
of the induced voltage that appears at each end of the pipeline (i.e., V1 and V2) is
directly proportional to the induced electric field (E), inversely proportional to the
propagation constant (γ) and the characteristic impedance (Z0), and dependent on
the relative impedances to ground, Z1 and Z2 at each end of the pipe.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:8
In practical terms the variables can be listed as follows into two categories—those
factors that affect the induced electric field (E) and those that affect the
longitudinal impedance (Z) and the shunt admittance (Y).
4.1.2 Factors that Affect the Induced Electric Field (E)
The value of the induced electric field (E) is a function of the following factors
and events:
4.1.2(a)
Solar Cycle Variations
The solar cycle produces peaks of solar activity at approximately 11-year
intervals. These periods correspond to a change in the location of the north and
south magnetic poles of the sun. This periodicity of solar activity is illustrated in
Figure 4-8, which is a history of geomagnetic effects over the last 150 years. The
intensity of sunspot activity on average appears to be increasing with time. The
next peak should be expected from approximately 2011 to 2013, whereas a
general quiescent period should be expected from 2005 to 2007.
Geomagnetic Effects
100
Sunspot Number
80
150
60
100
40
50
Magnetic Disturbances
200
20
0
0
1860
1880
1900
1920
Year
1940
1960
1980
2000
Figure 4-8: History of Geomagnetic Effects on Ground Technology
Courtesy of D.H. Boteler, Geological Survey of Canada, Geomagnetic Laboratory, Ottawa, Ontario, Canada
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4.1.2(b)
4:9
Sun’s Rotational Frequency
The sun’s rotational frequency of approximately 27 days will produce a variation
in the solar plasma because sunspots and solar flares are not uniformly distributed
over the sun’s surface.
4.1.2(c)
Earth’s Rotation
The earth’s rotation means that a metallic structure will experience the
geomagnetic difference between the sun and night side of the earth. Voltage
changes that have a repeating 24-hour variation are often called “diurnal”
fluctuations. Diurnal fluctuations in pipe-to-soil potential are evident in Figure 49. Note that in this case the most electropositive potentials occur at midday.
-2000
-1500
-1000
-500
12:00
0:00
12:00
0:00
12:00
0:00
12:00
0:00
0
12:00
Pipe Potential wrt CSE (mV)
-2500
Time (Atlantic)
Figure 4-9: Pipe-to-Soil Potential Variations with Time
4.1.2(d)
Plasma Magnetic Field Direction
The direction of the plasma magnetic field has a significant impact on the
magnitude of the induced electric field. When the solar particles leave the sun,
the sun’s magnetic field at the point of emission is frozen in the plasma blob.
When the plasma magnetic field is directed southward (against the earth’s
magnetic field), then geomagnetic substorms produce a larger electric field.
However, when the plasma magnetic field is northward, there are no significant
changes in the induced electric field. Hence the impact of a corona mass ejection
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:10
on the induced electric field is very much a function of the alignment of its
magnetic field relative to the earth’s magnetic field.
4.1.2(e)
Proximity of Pipeline to a Sea Coast
The proximity of the pipeline to a sea coast also introduces a potential change on
a pipeline. As illustrated in Figure 4-10, a voltage gradient exists between the
low-resistivity seawater and the higher-resistivity land. This is due to charge
accumulation because of the larger induced currents in the sea compared to the
land, which increases the electrical potential of the earth near the coast. This
effect is also true on land at sudden transitions between high- and low-resistivity
soils.
Land
Sea
Earth Surface Potential
Figure 4-10: Charge accumulation at sea coast resulting from larger induced currents
in the sea compared to in the land. The charge accumulation increases the
electrical potential of the earth’s surface near the coast.
Source: Boteler, D.H., Gummow, R.A. and Rix, B., Evaluation of Telluric Current Effects on the Maritimes and Northeast
Pipeline, NACE Northern Area Eastern Conference and Exhibition, Ottawa, ON, October 1999, p.11.
Tidal activity can also generate ocean currents due to the Hall effect as illustrated
in Figure 4-11.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:11
Magnetic
Field
v
Sea
Land
E
Earth Surface Potential
Figure 4-11: Electric Field, E, generated by seawater moving with velocity, v,
through the earth’s magnetic field, B
Source: Boteler, D.H., Gummow, R.A. and Rix, B., Evaluation of Telluric Current Effects on the Maritimes and Northeast
Pipeline, NACE Northern Area Eastern Conference and Exhibition, Ottawa, ON, October 1999, p.12.
As the water moves with a velocity (v) in a perpendicular magnetic field, positive
and negative charges are forced in opposite directions perpendicular to the tidal
direction. The potential difference created by this tidal dynamo can be
approximated by the following equation.
E = VBZW
where:
Ε
v
BZ
W
=
=
=
=
[4-11]
the potential difference
the water velocity
the vertical component of the magnetic field
the width of the water channel
Using this equation and assuming that the vertical component of the magnetic
field was approximately 50×10-6 Tesla, a potential difference (E) of 52V was
calculated for the Bay of Fundy—where some of the largest tides in the world
occur.[2]
2
Boteler, D.H., Gummow, R.A. and Rix, B., Evaluation of Telluric Current Effects on the Maritimes and
Northeast Pipeline, NACE Northern Area Eastern Conference and Exhibition, Ottawa, Ontario,
October 1999, p.11.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4.1.2(f)
4:12
Pipeline Latitude
The location of the pipeline relative to the earth’s magnetic poles has a major
impact on the magnitude of the induced electric field. Figure 4-12 illustrates the
probability of a geomagnetic peak at about 0.2% at mid-latitude and decreases
toward the north pole and the equator.
Figure 4-12: Geomagnetic Hazard Percentage of Probability of Occurrence
Source: Molinski, Tom, Geomagnetically Induced Currents: - Causes, Effect, and Mitigation,
IEEE Canadian Review – Fall 1996, p.13
The peak probability coincides with the general location of the auroral electrojet
shown in Figure 4-3. Furthermore Figure 4-2b illustrates an electrojet located at
the equator. There have been reports of telluric activity on pipelines located near
the equator in Panama.[3]
3
Soto, Gonzalo, Control de Corrosion en El Oleoducto de Panama, El VIII Seminario Latinamericano de
Corrosion y Electroquimica, 1985, City of Panama.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:13
4.1.3 Factors that Affect the Pipeline Lineal Impedance
(Z) and Shunt Admittance (Y)
Besides the geophysical factors that can affect the electric field magnitude,
pipeline factors such as the lineal impedance (Z) and the shunt admittance (Y)
also affect the induced voltage. Both the propagation constant (γ) and the
characteristic impedance (Z0) of a pipeline, as indicated in Equations 4-1a and 41b, are dependent on these parameters.
Small values of lineal impedance or small shunt admittance result in a small
propagation constant that produces a more linear relationship between induced
voltage and distance (Figure 4-13).
large γ (electrically long)
0
0
small
γ (electrically short)
Figure 4-13: Telluric Induced Voltage Profile vs Distance for a Pipeline
with Different Attenuation Constants
A pipeline with a large propagation constant is considered electrically lossy or
long and a pipeline with a small propagation constant is considered to be
electrically “short.”
4.1.3(a)
Effect of Coating Quality
The shunt admittance of a coated pipeline is primarily a function of the coating
quality and, to a lesser extent, the soil resistivity. Figure 4-14 shows that as the
coating conductance increases, the voltage induced on a long pipeline decreases.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:14
25
E = 0.1 V/km
20
Coating = 1 microS/sq.m.
15
10
Coating = 10 microS/sq.m.
5
Coating = 100 microS/sq.m.
0
200
400
600
800
1000
Pipeline Length (km)
Figure 4-14: Calculated Telluric Induced Voltage at the End of a Long Pipeline as a Function
of Coating Conductance for an East-West Electric Field of 0.1V/km
Source: Boteler, D.H., Evaluation of Telluric Current Effects on the Maritimes and Northeast Pipeline, Geomagnetic
Laboratory, Geological Survey of Canada, Ottawa, Aug. 1998, p.8.
A high-quality coating, although important for cathodic protection (CP)
effectiveness, results in higher induced voltages because the induced current
cannot easily leak to earth.
4.1.3(b)
Effect of Isolating Fittings
Isolating fittings in a pipeline produce a voltage peak on each side of the
electrical isolation that are 180 degrees out of phase. Multiple isolating fittings
therefore create multiple peaks, albeit with lesser voltage differences across the
isolation (Figure 4-15).
0
0
1 isolating fitting in middle
3 isolating fittings
no isolation
Figure 4-15: Effect of Isolating Fittings on the Telluric Induced Voltage Profile
on an Electrically Short Pipeline
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:15
Note that telluric currents are alternating. Therefore, the polarity will change
periodically and the voltage appearing across the isolator will be greater than the
voltage-to-earth on either side of the isolator.
4.1.3(c)
Effect of Pipeline Directional Change
A change in pipe direction has the same impact on the telluric induced voltage
(Vt) as it does with the induced AC voltage profile where the pipe crosses or
leaves the powerline right-of-way. Because of the electromagnetic discontinuity
created by the direction change, a voltage peak is created as illustrated in Figure
4-16 for an electrically long pipeline.
Vt
pipeline bend
Figure 4-16: Effect of Pipeline Directional Change on the Telluric Induced Voltage Profile
The same effect as illustrated in Figure 4-16 will also occur at a sudden change in
earth conductivity (e.g., clay/rock). But these earth conductivity changes are
more difficult to predetermine than directional changes. In both cases, however,
the induced voltage is also dependent on the direction of the induced electric
field.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4.2
4:16
Measuring the Geomagnetic Intensity and
Determining the Electric Field (E)
Geomagnetic activity is continuously monitored at observation posts around the
world that record the geomagnetic disturbances caused by the solar wind. In
North America, geomagnetic activity information can be obtained at
www.geolab.nrcan.gc.ca in Canada and www.sel.noaa.gov in the U.S. The
magnetic variations are recorded by magnetometers in units of nanoteslas (nT).
There are a number of indexes that have been created to express the geomagnetic
activity. For pipelines the Kp index is the most useful. The Kp index is an
arithmetic average based on three-hour intervals. This index is logarithmic and
spans from 0 (quiet) to 9 (severe), where activity greater than Kp 4 is considered
a geomagnetic storm. The probability of a geomagnetic storm decreases
logarithmically as the Kp index increases (Figure 4-17).
10- 0
2
10-1
2
10- 2
2
-3
10
2
-4
10
0
1
2
3
5
4
6
7
8
9
Kp
Figure 4-17: Average Occurrence of 3-Hour Intervals with the Magnetic Activity Index Kp Equal
to or Greater than a Specified Value. Kp=9 Corresponds to a Severe Magnetic Storm
Source: Boteler, D.H. and Rix, B., Telluric Current Considerations in the CP Design for the Maritimes and Northeast
Pipeline, NACE Corrosion 2001, Houston, TX, March 2001, Paper No. 317.
This figure shows that small disturbances occur frequently but the most severe
storms are very infrequent. A Kp 6 storm, which is likely to occur 2 percent of
the time, is considered significant because it relates to an average electric field
magnitude of 100mV/km as shown in Figure 4-18.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:17
1000
100
10
1
0
1
2
3
5
4
6
7
8
9
Kp
Figure 4-18: Peak Electric Field Magnitudes as a Function of Kp
Source: Boteler, D.H. and Rix, B., Telluric Current Considerations in the CP Design for the Maritimes and Northeast
Pipeline, NACE Corrosion 2001, Houston, TX, March 2001, Paper No. 317.
Note that within a three-hour period for a Kp 6 storm, the electric field ranged
from approximately 30 to 300 mV/km. The foregoing data were used in
estimating the effect on a 762 mm diameter 1000-km pipeline running from
Goldboro, Nova Scotia, through to New England at subauroral latitudes. For
pipelines in other geographical locations, a similar plot could be obtained from
the appropriate geomagnetic laboratory. This is necessary to produce an accurate
prediction of tellurically induced voltages using the DSTL model.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4.3
4:18
Interference Effects of Telluric Current on
Pipelines
4.3.1 General Considerations
The impact of these geomagnetically induced currents has historically been
considered more of a nuisance when measuring CP parameters than a serious
corrosion concern. However, there are three main areas of concern regarding the
effects of geomagnetically induced currents on coated pipelines:
1.
Corrosion during the positive half-cycles of the telluric waveform.
2.
Accuracy of pipeline current and potential measurements when
determining the level of CP for comparison with industry criteria.
3.
Coating damaged caused by excessively negative potentials during
the negative half-cycles of the telluric waveform.
4.3.2
4.3.2(a)
Corrosion
Theoretical Considerations
During the time when telluric current transfers from the pipe to earth (positive
portion of the telluric cycle), the charges must transfer through an oxidation
reaction. For a steel pipe without CP, the primary oxidation reaction is corrosion
of the steel (Figure 4-19) and as expressed by the following reaction:
Fe° ⇒ Fe++ + 2e- (corrosion)
Grade
it
Feo = Fe++ + 2eFigure 4-19: Oxidation Reaction at Pipe Surface
During Telluric Current Discharge in the Absence of CP
CP Interference
© NACE International, 2006
January 2008
[4-12]
Telluric Current Interference
4:19
Theoretically, approximately 10kg of steel will be lost in 1 year for every ampere
of continuous direct current (DC) that discharges.
When a pipeline is being cathodically protected or is receiving telluric current
(Figure 4-20), the charge transfer reactions can be one or both of the following
depending on the soil conditions;
H 3 O + + e-
or
2H2O + O2 + 4e-
⇒ H0 + H20 (in deaerated or acidic soils)
[4-13]
⇒ 4OH- (in alkaline or neutral aerated soils)
[4-14]
Figure 4:20: Reduction Reactions During Negative Cycle Telluric and
CP Current Pick-up
Both these reduction reactions produce a high-pH environment, typically in the
range of 10 to13, at coating flaws (holidays). The magnitude of the pH has been
shown to be proportional to the logarithm of the current density[4] as shown in
Figure 4-21.
4
Thompson, N.G., Barlo, T. J., Fundamental Process of Cathodically Protecting Steel Pipelines, 1983
International Gas Research Conference, p.279.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:20
14
13
12
11
10
9
8
10-9
10-7
10-8
10- 6
10- 5
10-4
C.P. Current Density, A/cm2
Figure 4-21: Steel Surface pH versus Applied CP Current Density
When positive charges transfer from a surface that has been cathodically
protected, the initial oxidation reaction is therefore likely to result in the
formation of a passive film (Figure 4-22).[5] Here it can be seen that, as the steel
becomes progressively more cathodically polarized, the anodic polarization curve
exhibits progressively more passive behavior.
-0.5
-0.6
-0.7
Before polarization
anodic polarization
-0.8
-200 mV
mV
-200
-0.9
-1
-400 mV
-1.1
-1.2
-1.3
0.0001
0.001
0.01
0.1
1
Current Density (mA/cm2 )
Figure 4-22: Polarization Curves after Several Days of Potentiostatic Polarization
Source: Hesjevik, S.M. and Birketveit, O., Telluric Current on Short Gas Pipelines in Norway – Risk of Corrosion on
Buried Gas Pipelines, NACE Corrosion 2001, Houston, TX, Paper No. 313, p16. (Figure redrawn)
5
Hesjevik, S.M. and Birketveit, O., Telluric Current on Short Gas Pipelines in Norway – Risk of
Corrosion on Buried Gas Pipelines, NACE Corrosion 2001, Houston, TX, Paper No. 313, p16.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:21
Where the pipeline has been cathodically protected for a long period of time and
the pH at the pipe/soil interface is high, the initial potential/current density
relationship should be similar to that shown in Figure 4-23. Here, for a pH of 12,
one can see that, as the potential moves from approximately –950mVsce, the
current increases up to the primary passive potential of approximately –850mVsce,
after which it diminishes as the potential moves through the passive range to the
start of the transpassive region at approximately +600mVsce. Because the
corrosion reaction is one that produces a passive film, then the initial corrosion
rate (i.e., the current density) resulting from this anodic excursion would be low.
+700
+500
-200
-400
-600
pH 12.0
-800
-1000
-1200
1
10
100
1,000
10,000
Current Density, Microamps/cm2
Figure 4-23: Experimental Anodic Polarization Curve of Steel in Hydroxide (pH 12.0)
Source: Thompson, N.G., Lawson, K.M., and Beavers, J.A., “Exploring the Complexity of the Mechanism of Cathodic
Protection”, Corrosion ’94, Paper No. 580, NACE International, 1994, p.11. (Figure redrawn)
If the telluric current discharge is sustained but the residual pH remains high, then
the oxidation reaction could be expressed by Equation 4-15, the oxidation of
hydroxyl ions, or by Equation 4-16, the hydrolysis of water (Figure 4-24); neither
of these equations results in metal loss.
4OH- ⇒ 2H2O + O2↑ + 4e+
2 H2O ⇒ O2↑ + 4H + 4e
CP Interference
© NACE International, 2006
January 2008
-
[4-15]
[4-16]
Telluric Current Interference
4:22
Grade
icp
it
4OH2H2O
H2O + O2 + 4eO2 + 4H+ + 4e-
Figure 4-24: Telluric Current Discharge from a Cathodically Protected Pipe
Accordingly, the total corrosion that occurs at a coating defect as a result of
current discharge is not strictly proportional to the charge transferred as would be
predicted by Faraday’s Law for a steady-state DC.
4.3.2(b)
Calculating the Corrosion Rate
Cyclic variations in telluric current of equal amplitude and period will corrode
steel less than a steady state DC of the same magnitude applied for the same time
period, as previously discovered in a National Bureau of Standards (NBS)
investigation[6] and as illustrated in Figure 4-25.
6
McCollum, B., Ahlborn, G.H., Influence of Frequency of Alternating or Infrequently Reversed Current
on Electrolytic Corrosion, National Bureau of Standards Tech Paper No. 72, 1916.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:23
100
90
LEGEND:
Soil
Soil + Na2CO3
80
70
60
50
40
30
20
10
0
-10
1/60S 1/15S
1S
5S
1M 5M 10M 1Hr.
2Days 2Weeks
D.C.
Logarithm of Length of Time of One Cycle
Figure 4-25: Coefficient of Corrosion at Different Frequencies for
Iron Electrodes Denoted as Average Electrode Loss
This study, which was commissioned to determine the relative corrosivity of stray
currents arising from DC transit systems, has some merit with respect to telluric
stray currents because the periods of activity are somewhat similar. In fact
Campbell[7] produced the following mathematical relationship using the NBS
findings to estimate the corrosion as a function of the telluric current cycle for a
fixed amplitude:
C = ( 4.7 ± 1.3) T+0.186
where:
[4-17]
C is percent of DC corrosion that would occur at the same amplitude
T is the period of the current cycle in seconds
Peabody[8], as shown in Figure 4-26, also summarized the NBS findings in a
different graphical representation that demonstrates a relationship between the
logarithm of the period and the logarithm of the percentage of corrosion
compared to an equal amount of DC.
7
Campbell, W.H., Induction of Auroral Zone Electric Currents Within the Alaska Pipeline, Pure and
Applied Geophysics, Vol. 116, No.6, 1978, p.1167.
8
Peabody, A.W., Corrosion Aspects of Arctic Pipelines, Materials Performance, Vol. 18, No.5, May 1979,
p.30.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:24
Time Interval in Hours Between Current Reversals
100
10
2
1
0.5
0.1
0.01
0.001
5
10
22
29
50
100
Percentage of Direct Current Corrosion Rate
Figure 4-26: Effect on Corrosion Rate of Reversing Direction of Current Compared
To Steady State DC and Length of Time Between Reversals
Source: Peabody, A.W., Corrosion Aspects of Arctic Pipelines, Materials Performance, Vol. 18, No.5, May 1979, p.30.
(Figure redrawn)
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:25
Although telluric frequencies cover a wide spectrum, the induced electric field
peaks typically at periods between 30 minutes to 2 hours.[9] This corresponds to
corrosion activity that would be approximately 22 to 29% of an equivalent DC. It
should be noted, however, that diurnal telluric activity—which is typically less
intense than the shorter telluric fluctuations—would produce a corrosion rate of
approximately 50% of an equivalent DC because it would have a 12-hour period.
The amount of stray telluric current produced during the positive period depends
on the intensity of the telluric disturbances. On very well-coated modern
pipelines, current transfer between the pipe and soil occurs primarily at small
coating defects. Relatively small potential fluctuations in the order of 0.5 to 1.0V
can produce a large current density as shown in Figure 4-27.[10] Here, for a 1-cmdiameter circular holiday in a 0.3-mm thick coating, which is a typical thickness
for fusion bonded epoxy coatings, the current density for a soil resistivity of 1000
Ω-cm and a telluric voltage change of 1.0V, would be approximately
2500µA/cm2 and produce a corrosion rate of approximately 31.3mm/y.
Corrosion Current Density (µA/cm2)
100,000
t
t=0
t = 0.3mm
10,000
t = 1mm
Pipe
Wall
t = 3mm
1µA/cm2 = 0.0125mm/a (Fe)
d
Soil
2,500
t = 10mm
1,000
100
0.1
1
10
100
1000
Defect diameter (mm)
Figure 4-27: Corrosion Current Density at a Coating Defect having an Applied Voltage
of 1.0V in 1000 ohm-cm Soil for Various Coating Thicknesses
Source: Von Baeckmann, W., Schwenk, W., Handbook of Cathodic Protection, Portcullis Press, England, 1975, p.365.
(Figure redrawn)
9
Campbell, W.H. and Zimmerman, J.E., Induced Electric Currents in the Alaska Oil Pipeline Resulting
from Auroral Electrojet Current Sources, Geophysical Journal of the Royal Astronomical Society, Vol.
61, No.2, p.1164.
10
Von Baeckmann, W., Schwenk, W., Handbook of Cathodic Protection, Portcullis Press, England, 1975,
p.365.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:26
The corrosion rate arising from Figure 4-26 for a 1-cm-diameter defect with a
steady state voltage of +1V applied in 1,000 Ω-cm soil can be expressed as
follows:
CR = Ki y P
where:
Ki = corrosion current density factor (2.5 x 10-3 A/cm2 per volt)
P = corrosion penetration factor (12.5 x 10-3 mm/y per 10-6 A/cm2)
CR = corrosion rate (mm/yr)
To calculate the theoretical corrosion rate caused by telluric voltage fluctuations,
modify the corrosion rate formula to account for the cyclic variations in the
telluric wave form (Fp), the duration of time that the activity is present (Ft), and
the magnitude of the telluric voltage (ΔVt ) as follows:
CRtelluric = Ki y P y ΔVt y F(p) y F(t)
ΔVt = change in potential of the pipe caused by telluric activity
F(p) = fraction of steady state corrosion due to alternating period of the
telluric current
F(t) = fraction of time that telluric activity is present
As would be expected, the corrosion rate for a given potential change (ΔVt) varies
with the soil resistivity and the anodic transient time as illustrated in Figure 4-28.
(A)
(B)
100
10
Clay soil
1
0.1
Sandy soil
0.1
1
10
Anodic Transient Time (min)
100
Figure 4-28: Chart Showing the Influence of Anodic Transient Time with Respect to Corrosion
Experienced by Probe in Sandy and Clay Soil. Line (A) Represents the Corrosion Rate Expected
from Faraday’s Law for the Clay Soil, and Line (B) for the Sandy Soil, Respectively.
Source: Birbilis, N., Holloway, L.J. and Forsyth, M., Technical Note: Simulated Transient Loss of Cathodic Protection for
Buried Pipelines, Corrosion, Vol. 61, No.5, May 2005, p.500. (Figure redrawn)
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:27
This figure[11] shows the results of laboratory tests conducted on resistance probes
placed in clay (4,000 Ω-cm) and sand (50,000 Ω-cm) soil. The probes were
cathodically protected to –1000mVssc and subjected to an anodic transient to
0mVssc for 20% of the time for 1-minute, 10-minute, and 60-minute periods. Up
to a 10-minute anodic period, the corrosion rate is less than 1% of the theoretical
value based on the anodic current. It must be expected, however, that if the CP
potential was less negative than –1000mVssc (IR drop free), then the corrosion
rate would be greater than 1% of the theoretical value.
4.3.2(c)
Telluric Corrosion Case Studies on Cathodically
Protected Piping
Although corrosion of steel pipelines due to telluric current activity is
theoretically probable, it has not been considered by the pipeline industry as a
serious threat to the integrity of cathodically protected pipelines. This view was
probably a result of the findings of a study conducted by the American Gas
Association on four pipelines in the U.S. between 1966 and 1970. Their
investigation concluded that the effects are insignificant, both for coated,
protected lines and for bare lines.[12]
This study, however, focused on pipelines that were relatively short, located at
latitudes lower than 46 degrees N, on relatively poorly coated pipelines, and
during a period of relatively quiet telluric activity.
Subsequent findings by other investigators[13,14] on existing, cathodically
protected pipelines located in auroral zones using coupons showed that corrosion
was mild but not insignificant. From a study on Norwegian pipelines,
Henricksen, et al concluded that telluric current corrosion in auroral zones is
approximately the same magnitude as normal soil corrosion where telluric
corrosion is lacking.
11
Birbilis, N., Holloway, L.J. and Forsyth, M., Technical Note: Simulated Transient Loss of Cathodic
Protection for Buried Pipelines, Corrosion, Vol. 61, No.5, May 2005, p.500.
12
Gideon, D.N. et al., Earth Current Effects on Buried Pipelines – Analysis of Observations of Telluric
Gradients and their Effects, AGA Project PR-3-41, April 1970, p.71.
13
Henriksen, J.F. et al., Telluric Current Corrosion on Buried Pipelines, Proceedings of the 8th
Scandinavian Corrosion Congress, NKM8, Helsinki, Vol. II, 1978, p.167-176.
14
Martin, B.A., Telluric Effects on a Buried Pipeline, Corrosion, Vol. 49(4), 1993, p.349.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:28
Martin[15], following a telluric corrosion study on a 515-km gas pipeline in
northeastern Australia, reported corrosion rates in excess of 0.01 mm/y (4 mpy).
A more serious case of tellurically caused corrosion was discovered in 2001 on a
24-in Ø natural gas pipeline east of Montreal, Quebec.[16] This fusion-bonded
epoxy (FBE)-coated pipeline installed in 1998 was found to have a 60-mil pit at a
subcriterion location identified during a close-interval potential survey; the results
of the survey appear in Figure 4-29. The pipe-to-soil potential fluctuations at this
location were later correlated with the magnetic field variation (Figure 4-30).
1800
1600
1400
Potential (-mVcse)
1200
1000
OFF
ON
crit
800
600
400
200
0
107000
-200
108000
109000
110000
111000
112000
113000
114000
115000
Kilometers
Figure 4-29: Potentials Measured with Rectifiers ‘ON’ and ‘OFF’
Source: Brochu, B., Telluric Current Effects on Underground Steel Pipelines, NACE Northern Area – Eastern
Conference, Quebec City, August 2001
15
16
Ibid [14] p.349.
Brochu, B., Telluric Current Effects on Underground Steel Pipelines, NACE Northern Area – Eastern
Conference, Quebec City, August 2001.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:29
44000
Pipe-to-soil
potentials
43900
43800
43700
43600
Ey Geomagnetic Field
43500
1 2 :0 0 :0 0
1 2 :2 8 :4 8
1 2 :5 7 :3 6
1 3 :2 6 :2 4
1 3 :5 5 :1 2
1 4 :2 4 :0 0
1 4 :5 2 :4 8
1 5 :2 1 :3 6
Figure 4-30: Magnetic Field Intensity and Pipe-to-Soil Potential Superimposed
Source: Brochu, B., Telluric Current Effects on Underground Steel Pipelines, NACE Northern Area
Eastern Conference, Quebec City, August 2001.
The high corrosion rate of approximately 15 mils/y was unlikely because of the
high soil resistivity. Further investigation indicated that the pipeline at the
corrosion location was situated above a low-resistivity (100 Ω-cm) graphite schist
that extended northeastward for more than 100 km toward the Gulf of St.
Lawrence. This soil anomaly was thought to provide a relatively low-resistance
path between the pipeline and the Atlantic Ocean.
4.3.3
Impact on Accuracy of Current and Potential
Measurements
In the absence of a stray current on a cathodically protected structure, a pipe-tosoil potential measured using a high-input resistance voltmeter will be the sum of
the polarized potential (Ep) that appears across the pipe-to-earth interface and the
voltage drop (Ve) in the earth due to the CP current (Icp) through the earth path
resistance (Re) Equation 4-17.
Vm = Ep + Ve
where:
[4-18]
Ve = Icp • Re
The polarized potential (Ep) must be equal to or more electronegative than –850
mVcse in order to satisfy the NACE –850 mV criterion. It is usual on impressed
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:30
current systems to momentarily interrupt the CP current (Icp = 0) so that an
instant-off potential (Ei-off), measured the moment of interruption, is a reasonably
accurate representation of the polarized potential (Ep).
If a telluric current is present, the pipe-to-soil potential difference measurement
will incorporate an additional voltage drop (Vt) owing to the telluric current in the
soil path between the reference electrode and the pipe as represented by equation
4-19 and as illustrated in Figure 4-31.
Vm = Ecp + Ve ± Vt
Test
Station
[4-19]
Voltmeter
V
Portable Reference
Electrode
Grade
Icp
Ve
Pipe Test Lead
Vt
It
Ep
Figure 4-31: Schematic of Potentially Controlled CP System
Used to Mitigate Telluric Current Effects
Source: Gummow, R.A., Telluric Current Effects on Corrosion and Corrosion Control Systems on Pipelines in Cold
Climates, NACE Northern Area Western Region Conference, Alaska, Feb. 2001, Paper CldCli01, p.12.
Because telluric current is alternating, the error can make the pipe appear either
better protected or more poorly protected depending on its direction and change
the polarized potential if the telluric current is sustained with time. Unlike an
impressed current, the telluric current cannot be arbitrarily interrupted, which
then compromises the accuracy of a pipe-to-soil potential measurement.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:31
4.3.4 Impact of Telluric Current on Pipeline Coatings
NACE SP0169[17] cautions that “the use of excessive polarized potentials on
externally coated pipelines should be avoided to minimize cathodic disbondment
of the coating.” This precaution is typically being interpreted as a maximum
polarized potential equal to –1200mVcse.
During geomagnetic storms as illustrated by the calculated instant-off potential in
Figure 4-32, –1200 mVcse potentials can easily result on well-coated pipelines
during periods of telluric current pick-up.
5.5
2.0
5.0
1.5
Eon
1.0
4.5
Calculated Eoff
0.5
Current Density
4.0
3.5
0.0
-0.5
3.0
-1.0
2.5
-1.5
2.0
-2.0
1.5
-2.5
1.0
-3.0
0.5
-3.5
0.0
-4.0
-0.5
-4.5
-1.0
-5.0
-1.5
-5.5
03:50
03:55
04:00
04:05
04:10
04:15
04:20
04:25
04:30
04:35
04:40
-2.0
04:45
Time
Figure 4-32: Current Flow and Calculated OFF Potentials during a GIC Incident
Source: Hesjevik, S.M. and Birketveit, O., Telluric Current on Short Gas Pipelines in Norway – Risk of Corrosion
on Buried Gas Pipelines, NACE Corrosion 2001, Paper #01313. (Figure redrawn)
Cathodic disbondment and cathodic blistering both result from water migration
through the coating due to electro-osmosis. Generally, the thicker the coating is
and the better its moisture transmission resistance, then the less susceptible it is to
17
NACE Standard SP0169 – Control of External Corrosion on Underground or Submerged Metallic
Piping Systems, NACE International. NACE International publishes three classes of standards: standard
practices, standard material requirements, and standard test methods. Until June 23, 2006, NACE published standard
recommended practices, but the designation of this type of standard was changed to simply standard practice. New
standards published after that date will carry the new designation (SP), and existing standards will be changed as they
are revised or reaffirmed.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:32
these effects. Accordingly, FBE, being a thin film coating, is particularly
vulnerable to moisture transmission and consequential cathodic blistering at
locations of poor coating adhesion and cathodic disbondment as a result of the
high pH developed in the blister.
4.3.5 Impact on Output of a CP Transformer/Rectifier
An impressed current transformer/rectifier will pass a telluric current through the
rectifier element to its groundbed if the telluric current is in a discharge cycle, as
illustrated in Figure 4-33.
It
Icp
It
Icp
groundbed
pipeline
Figure 4-33: Telluric Current Through a Bridge Rectifying Element During a Discharge Cycle
This will also be true for a center-tapped transformer/rectifier.
When operating in constant voltage mode, the total output current (Io) of the
transformer/rectifier will increase:
that is:
Io = Icp + It
[4-20]
This is because the voltage difference (Vo) between the pipe and the groundbed is
the sum of the superimposed telluric voltage and the transformer/rectifier output
voltage (VTR):
that is:
Vo = VTR + Vt
[4-21]
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:33
But if the transformer/rectifier is operating on constant current, the CP current
(Icp) will drop when the telluric current (It) is present:
Icp = Io – It
that is:
[4-22]
This is undesirable because an increase rather than a decrease in the
transformer/rectifier output would be preferred at the time of a telluric current
discharge. Hence a transformer/rectifier should not be operated in constant
current when the pipeline is subjected to telluric current activity.
4.4
Mitigating the Effects of Telluric Current
4.4.1 Mitigating Corrosion Impact
4.4.1(a)
Making the Pipeline Electrically Continuous and
Grounded
Telluric voltages on pipelines arise from electromagnetic induction and are
therefore analogous to induced alternating current (AC) voltages. Similarly,
grounding the pipeline can be an effective method of mitigating telluric voltages
just as it is with AC voltages. Telluric voltages, which appear across an insulated
flange, can be reduced by electrically bonding around the isolating joint. As with
AC mitigation, however, the bond must be designed to maintain the performance
of the CP system. A telluric bond switch (Figure 4-34) has been used[18] to pass
telluric current across an insulator separating onshore and offshore portions of a
cathodically protected pipeline.
18
Boteler, D.H., Gummow, R.A., and Rix, B.C., Evaluation of Telluric Current Effects on the Maritimes
and Northeast Pipeline, NACE International Northern Area Eastern Conference, Ottawa, Paper No. 8A,
3, October 24, 1999.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:34
MOV
DUAL DIODE
To Offshore
Pipeline
Auto
Resetting
Fuse
Variable
Resistor
Shunt
Shunt
To Onshore
Pipeline
By-pass Switch
Figure 4-34: Schematic of a Telluric Bond Switch
Back-to-back diodes provide a fault path for the large telluric currents once the
breakover voltage of the diodes (typically 0.8V) has been breached. These diodes
are therefore rated to handle the largest expected telluric current typically arising
from a once-per-year severe storm (i.e., Kp 9 on Figure 4-18). Adjustment of the
variable resistor allows for a steady-state drain of current to balance the CP
systems between the onshore and offshore sections of the pipeline. Lightning
protection is provided by the metal oxide varistor.
It is also possible to mitigate telluric effects by connecting the pipeline to
electrical ground using AC coupling-DC isolating devices such as isolating surge
protectors and polarization cells. Grouped galvanic anodes connected to each
side of the isolating fitting can also be used but the anode capacity must be
chosen to provide a reasonable life and with enough current output to compensate
for any residual telluric current discharging from the pipeline.
4.4.1(b)
Using CP
CP systems can be designed and operated to mitigate telluric voltage fluctuations
by a combination of two related mechanisms. Impressed current output can be
increased to compensate for a telluric current discharge, or galvanic anodes can
provide a grounding path for the telluric current to pass to earth. The capacity to
perform these functions varies with the type and operating characteristics of the
CP system relative to the operating characteristics of the pipeline system and the
magnitude of the telluric activity.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4.4.1(b)(i)
4:35
Sacrificial Anodes
Sacrificial CP systems have a limited voltage capacity to compensate for a telluric
potential shift because they have a relatively small fixed output voltage. They do,
however, offer an alternative path to earth for the telluric current (It) because of
their low resistance to earth compared to a coated pipeline. Some proportion of
the telluric current (Itl) will transfer to earth via the anode (Figure 4-35),
depending primarily on the anode-to-earth resistance compared to the pipe-toearth resistance—both locally and looking down the pipe in the direction of the
current. If the CP current (Icp) is equal to or greater than the residual telluric
discharge current (Itll), then stray current corrosion will not occur on the pipe
under the influence of the anode.
I't''
It
I't'
Icp
galvanic anode
Icp + I't
I't
where:
residual telluric
current discharge
telluric current discharge
from galvanic anode
It = I't + I''t + I'''
t
Figure 4-35: Mitigation of Telluric Current Discharge Effects using Galvanic Anodes
This CP method, which makes the pipeline electrically lossy, has been used on
the Trans-Alaska pipeline[19] in the form of a zinc ribbon anode that was placed at
pipe invert elevation on each side of the pipe for the full extent of the
underground portion of the pipeline. Grouping of zinc and magnesium sacrificial
anodes at selected intervals has also been shown to be effective by Henriksen, et
al.[20] when used on a pipeline in northern Norway, where the telluric potential
fluctuations were reduced from ± 5 V to ± 0.1 V (Figure 4-36). Just as with
induced AC mitigation, the more electrically lossy a pipeline is, the lesser the
magnitude of the telluric voltage fluctuations.
19
20
Martin, B.A., Telluric Effects on a Buried Pipeline, Corrosion, Vol. 49 (4), 1993, p.343-350.
Henriksen, J.F., Elvik, R. and Granasen, L., Telluric Current Corrosion on Buried Pipelines,
Proceedings of 8th Scandinavian Corrosion Congress, Tehory andPraxis at Corroisons Prevention,
Volume II, p.167-176, Helsinki, 1978.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:36
mV, Cu/CuSO4
Grounding
-3000
OUT
IN
OUT
IN
OUT
IN
IN
OUT
-2000
-1000
0
+1000
+2000
2100
5/10-74
2300
0100
6/10-74
0300
0500
0700
0900
Time
Figure 4-36: Effect of Connecting and Disconnecting Groups of Galvanic Anodes
to a Pipeline Subjected to Telluric Current
For instance, if a 0.5-m-diameter coated pipeline has a conductance of 10-6 S/m2
in 10,000 Ω-cm soil (a reasonable expectation for modern coatings) then it has a
conductance per 100m of 0.157 x 10-3 S.
Example Calculation:
Consider a coating having a specific leakage conductance (G) of 10-6 S/m2 in
10,000 Ω-cm soil.
For 100m of 0.5-m-diameter pipe, the leakage conductance (g) would be:
g pipe = G 10,000 × A P
= 10 S/m × 157 m
-6
2
g pipe = 1.57 × 10 - 4 S
AP = πdl
2
= 3.14 × 0.5 m × 100 m
= 157 m 2
Assume a packaged magnesium anode (9.1 kg × 1.52m lg) is attached to the
piping for each 100m length.
The conductance (g) of the anode to earth in 10,000 Ω-cm soil is given by
the following equation, which is the reciprocal of the anode resistance as
calculated by Dwight’s equation for a vertical electrode:
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:37
g anode =
where: L = 1.52 m
d = 0.12 m
ρ = 100 Ω-m
1
R anode
=
2πL
1
×
8L
ρ
-1
ln
d
=
6.28 × 1.52 m
×
100 Ω - m
[4-23]
1
12.16
-1
ln
0.12
1
= 0.0263 S
3.61
= 26.3 × 10 -3 S
= 0.095 ×
g anode
The net conductance (gn) for a 100m of pipe with the anode attached is
therefore:
g n = g anode + g pipe
= 26.3 × 10 -3 S + 0.157 × 10 -3 S
= 26.5 × 10 -3 S
This is an increase in conductance of 167 times, which is well over two
orders of magnitude.
As Figure 4-37 shows, an increase in conductance of this order can
significantly reduce the magnitude of telluric induced voltage (i.e., 90%
reduction).
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:38
Figure 4-37: Effect of Increased Coating Conductance on the Voltage on
Each Side of Isolated Flanges
There is some belief that the telluric current seen on pipelines results primarily
from current transfer (conductance) between the pipe and earth rather than from
inductance directly. If this were the case, then magnesium anodes would be
preferred over zinc anodes because they would not pick-up current until the pipeto-earth potential exceeded their open-circuit potential (approximately –
1.750Vcse). In contrast, zinc would accept telluric current when a potential of –
1.100Vcse was exceeded. Magnesium anodes would therefore lessen the amount
of current pick-up and provide more CP current compared to zinc.
There may also be net CP benefit with the use of sacrificial anodes in the
presence of a telluric current. Results from an experiment[21] that applied a signal
simulating a telluric wave form to a combination of a steel pipe and a zinc ribbon
found that there was a net pick-up of the alternating signal on the pipe.
Conversely, there was a net increase in the amount of current discharged from the
21
Unpublished results from research to determine the potential and current effects on a steel pipe/zinc
ribbon couple, CORRENG Consulting Service Inc., Downsview, ON, Canada 1993.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:39
anode. This may be due to the fact that the anode does not pick-up the AC until
its open-circuit potential is exceeded and the pipe does not discharge current until
the anode potential is polarized electropositively to the pipe polarized potential.
4.4.1(b)(ii) Impressed Current Systems
Impressed current CP (ICCP) systems can theoretically be designed with
unlimited voltage capacity, although it is inefficient to continuously operate the
system at higher voltages just to provide a buffer for the anticipated telluric
positive voltage shift. Moreover, the very high negative potentials produced, as a
result of operating ICCP systems at high current outputs, can cause cathodic
disbondment of the coating. Martin[22] found that operating rectifiers in constant
voltage or constant current mode had “little mitigative effect” because they
caused “overprotection during local negative transients and underprotection
during local positive transients”.
There have been reports[23,24] that telluric voltage fluctuations are more
pronounced near rectifier locations than between them. There is no doubt that
anodic telluric currents will pass to earth through the rectifying element in the
transformer-rectifier as discussed in Section 4.3.5.
When operating in constant current mode (where Io is kept constant), CP current
will be reduced by the amount of the telluric current through the rectifier—
thereby diminishing the amount of CP available to counteract the residual telluric
current discharge from the pipe. Hence, it would seem that—from a telluric
current mitigation point of view—impressed current systems should not be
operated in constant current mode.
22
Martin, B.A., Telluric Effects on a Buried Pipeline, Corrosion, Vol. 49 (4), 1993, p.345.
Proctor, T.G., Experience with Telluric Current Interference in the Cathodic Protection of a Buried
Pipeline in New Zealand, NACE, Corrosion /74, Paper No. 57, p11.
24
Private communication with Ian Munro, Corrosion Service Co. Ltd., Feb. 2001.
23
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:40
Martin[25] and other operators[26,27] have used the potential control mode to
successfully ameliorate telluric currents even though Proctor[28] concluded that
“the value of constant potential impressed current power sources in compensating
for telluric current interference is questionable”. The voltage and current output
of these units change automatically in response to the pipe potential as measured
to a local reference electrode, as illustrated schematically in Figure 4-38.
Potentially Controlled
DC Power Supply
-
S
R
+
Icp
and
It
Icp
and
It
Permanent Reference
Electrode/Coupon
Remote
Groundbed
Figure 4-38: Schematic of Potentially Controlled CP System
used to Mitigate Telluric Current Effects
Here the coupon potential is measured continuously with respect to the permanent
reference electrode and compared to a pre-set potential in the controller of the DC
power supply. When a telluric current attempts to discharge from the
pipe/coupon, the reference senses the positive potential shift and the power
supply immediately increases its output to maintain the set potential value. The
impressed current system therefore presents a negative resistance path for the
telluric current to earth and thus there is no residual discharge of telluric current
from the pipe as long as the voltage or current output of the power supply is
within its rating. A coupon is used to minimize IR drop between the reference
electrode and the nearest holiday so that the rectifier can control to a potential that
has minimal IR drop component.
25
Martin, B.A., Telluric Effects on a Buried Pipeline, Corrosion, Vol. 49 (4), 1993, p.345..
Peabody, A.W., Corrosion Aspects of Arctic Pipelines, Materials Performance, Vol. 18 (5), May 1979.
27
Degerstedt, R.M., Kennelley, K.J., Lara, P.F., and Moghissi, O.C., Acquiring “Telluric-nulled” Pipe-tosoil Potentials on the Trans Alaska Pipeline, Corrosion ’95, Paper No. 345, NACE International.
28
Proctor, T.G., Pipeline Telluric Current Difference as one Phase of a Wider Interdisciplinary
Technological Problem, NACE, Corrosion /74, Paper No.60, p.16.
26
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:41
600
6
500
5
400
4
300
3
200
2
100
1
0
Pipe Potential wrt ZRE (mV)
-100
0
1
2
3
4
5
6
7
-1
-200
-2
-300
-3
-400
-4
-500
-5
-600
-6
-700
-7
-800
-8
-900
-9
-1000
-10
Day
Figure 4-39: Pipe Potential and Rectifier Current Output vs Time for
an Impressed Current System Operating in Potential Control
Note that, in this example, the rectifier operates only when the pipe potential
attempts to go more electropositive than the set potential of –100 mV/ZRE
(approximately –1200 mV/cse). Telluric current is drained to earth during periods
of telluric current discharge. During periods of telluric current pick-up, the
current output goes to zero and thus limits the magnitude of the negative potential
applied across the coating. This mode of operation effectively eliminates the
positive telluric voltage fluctuations in the vicinity of the rectifier while
minimizing excessively negative potentials and maximizing the life of the
groundbed. This technique works most effectively when the transformer/rectifier
and groundbed are located at peak locations of telluric current activity.
CP Interference
© NACE International, 2006
January 2008
Rectifier Current (A)
The power supply voltage and current capacity must be sized to provide the
needed CP current in addition to the amount of telluric current to be drained. This
type of CP system functions as a telluric current “forced drainage” system. Its
mitigating effect is illustrated in Figure 4-39, which compares typical rectifier
current output and pipe potential over time.
Telluric Current Interference
4:42
4.4.2 Compensating for Measurement Error Caused by
Telluric Current
Because geomagnetically induced current cannot be arbitrarily interrupted, an
alternative pipe-to-soil potential measurement method has been employed by
some companies[29,30]. The method uses a small steel coupon installed next to the
pipe, which is interconnected with the pipe inside a test station. The coupon
simulates the pipe/soil surface at a defect in the coating. When the coupon is
temporarily disconnected and the reference electrode is placed in the soil tube
(Figure 4-40), both the telluric and CP voltage drops in the earth are removed
from the measured potential difference and the “instant off” potential (Ep) of the
coupon is measured for comparison to the –850 mVcse criterion.
Test Station
Switch
Voltmeter
V
Grade
Pipe Test Lead
Portable Reference
Electrode
Non-metallic Tube
filled with Sand/
Bentonite Mixture
Steel Coupon
Figure 4-40: Typical Pipe-to-Soil Potential Measurement at Test Station
having a Steel Coupon and Soil Tube
29
Stears, C.D., Moghissi, O.C., Degerstedt, R.M., and Bone, L., Field Program on the Use of Coupons to
Monitor Cathodic Protection of an Underground Pipeline, Corrosion ’97, Paper No. 564, NACE
International, Houston, TX, 1997.
30
Greenwood, R., The Effects of Transient Stray Current on Cathodically Protected Pipelines, British Gas
Engineering Research Report, July 1986, p4-6.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:43
This test arrangement is not suitable for recording the polarized potential with
time, however, because the coupon has to be disconnected for each measurement.
The use of a reference/coupon combination, as illustrated in Figure 4-41, has
proved to be an excellent method of recording a polarized potential with time.
The coupon in this device does not require disconnection because the reference is
located inside the pipe coupon, where there is neither CP nor telluric voltage
gradient.
Test Station
VR
Recording Voltmeter
Grade
Pipe test lead
Coupon test lead
Zinc Reference
test lead
Coupon/Reference Probe
Figure 4-41: Typical Pipe-to-Soil Potential Recording at a Test Station
Using a Coupon/Reference Probe
Figure 4-42 compares the pipe/coupon potential recorded to a CSE reference
placed on grade and the reference located inside the coupon. The difference
between the potential values is the soil voltage gradient caused by both the
telluric and CP currents. Note that, despite the significant potential fluctuations
in the potential measurement using a surface copper-copper sulfate electrode, the
actual potential at the coupon/soil interface is relatively stable with time.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:44
-3000
-2500
Potential (mVCSE)
-2000
Potential wrt portable reference on Grade
-1500
-1000
Potential wrt Coupon Reference
-500
*For convenience, the readings were converted in mVCSE using a zinc potential of -1100 mVCSE
0
9:00
11:24
13:48
16:12
18:36
21:00
23:24
Time
Figure 4-42: Comparison between Pipe/Coupon Potential with Time recorded with
respect to a Copper-Copper Sulfate Reference on Grade and to a
Coupon/Reference Probe Located at Pipe Depth
Although the use of a coupon is a relatively simple solution at a test station, the
measurement of telluric free potentials is more complex for close interval
potential surveys (CIPS) where the reference is moved and placed over the pipe at
intervals (typically < 3 m) along the route of the pipeline.
Proctor[31] proposed a measurement method to compensate for the telluric induced
voltage that involved the correction of the measured potential (Vm) with respect
to the moving reference by the change in potential (ΔVf) measured with respect to
a fixed reference located at a nearby test station such that
where:
31
Vps = Vm ± ΔVf
[4-24]
ΔVf = Vfave ± Vf
[4-25]
Proctor, T.G., Experience with Telluric Current Interference in the Cathodic Protection of Buried
Pipeline in New Zealand, Materials Performance, Vol. 13, No. 6, 1974, p29.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:45
This measurement technique is illustrated in Figure 4-43 in which two separate
data loggers are used to record the potentials with respect to the fixed and moving
electrodes.
Roving
Datalogger
Synchronized
Fixed or
Moving
Datalogger
Vm
Vf
Moving
Reference
Fixed
Reference
Survey Length
Figure 4-43: Pipe-to-Soil Potential Measurement Method to Compensate for
Telluric Current Effects During a Close Interval CP Survey
This technique can be used with synchronous interruption of the rectifiers such
that a telluric compensated “instant off” potential can be calculated in software
from the recorded data. The accuracy of this technique depends on whether the
average potential (Vfave) truly represents an average potential unaffected by
telluric current and on the proximity of the fixed location to the moving electrode
because long separation distances can introduce errors caused by potential
differences in the earth parallel to the pipe route and to telluric current voltage
drop in the pipe.
Place and Sneath[32] have used a variation of the foregoing technique in
combination with CP current interruption to produce close interval survey data
that is telluric-compensated. Their test arrangement (Figure 4-44) uses two
stationary data loggers, one at the start of the CIPS (Vrs) and one at the end of the
survey span (Vrf).
32
Place, T., and Sneath, O., Practical Telluric Compensation for Pipelines, Proceedings, NACE Northern
Area Western Conference, Saskatoon, Feb. 2000.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:46
Vrf
Vm
y
Vrs
x
Figure 4-44: CIPS Method using One Moving and Two Stationary Data Loggers
All data loggers are synchronized by referencing the global positioning system
(GPS). The telluric compensation is a linear extrapolation of the telluric shift at
each data logger relative to the moving reference’s proximity to each stationary
reference. This correction routine, done in software, is expressed as follows;
Vps = Vm ± ΔVrs •
Where:
y
x
± ΔVrf •
x+y
x+y
[4-26]
the ΔVrs and ΔVrf are the differences in potential compared to the
average potential [Vrfave and Vrsave] recorded at each location over
a period of time prior to the survey.
This technique tends to minimize the error inherent in the previous method when
the distance between the moving reference and the single stationary data logger
increases significantly. Both techniques assume that the telluric voltage amplitude
is linear over the relatively short distances surveyed and that pipeline voltage
drop error created by the telluric current in the pipe between the start and finish
test stations is negligible. Also, each method is dependent on the validity of the
prerecorded data that establish the average potential with time at the start and
finish test stations. The shorter this period is prior to the survey, the greater will
be the influence of short duration telluric activity and the less will be the effect of
any diurnal telluric activity.
Figure 4-45 compares the typical before and after correction pipe-to-soil potential
data.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:47
Figure 4-x22: Comparison of Raw Pipe-to-Soil Potential Data to Compensated Data
Figure 4-45: Pipe-to-Soil Potential Measurement Method to Compensate for
Telluric Current Effects During a Close Interval CP Survey
Note that this compensation technique did not remove all the telluric voltage
fluctuations because of its limitations.
Degerstedt, et al[33] have used a “telluric null” technique for surveys on the Trans
Alaska Pipeline System, which overcomes some of the limitations of the
foregoing survey methods.
They recorded the potential and current parameters at a test station with time to
produce a fundamental characteristic for each test location, as illustrated in Figure
4-46.
33
Degerstedt, Ross, M., Kennelley, K.J., Lara, P.F., Moghissi, O.C., Acquiring Telluric-Nulled Pipe-toSoil Potentials on the Trans Alaska Pipeline, Corrosion ’95, Paper No. 345, NACE International,
Houston, TX, 1995.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:48
+0.8
+0.6
I telluric (A)
(downstream)
Telluric Voltage
Correction Factor
+0.4
+0.2
I telluric (A)
(upstream)
-0.2
-0.4
-0.6
-0.8
-1.0
-1.2
-1.4
Telluric ‘Null’
Potential
-1.6
Pipe Potential
(VCSE)
Figure 4-46: Pipe Potential/Telluric Current Relationship at a Coupon Test Station
The telluric current was measured using magnetometers placed on grade on each
side of the pipeline. It can be seen that there is a linear relationship between the
telluric current and the pipe potential and that, through regression analysis, the
“telluric null” potential is identified as the intercept with the pipe potential axis.
With a historical characteristic established at each test station, the CIS is
conducted using GPS time stamping to record both pipe current magnitude and
potential with respect to a moving reference. This potential is corrected relative to
the voltage at the fixed electrodes at the adjacent test stations by an appropriate
correction factor.
In lieu of magnetometers, the pipe current can also be determined by measuring
the voltage drop along the pipe as illustrated in Figure 4-47, although this
arrangement would require installation of pipe test leads at each test station
location. Where telluric current activity is anticipated, the four wire test
arrangement should be installed at each test station location so that the telluric
null method can be utilized. In addition, each test station should also incorporate
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:49
a coupon/reference probe to facilitate the recording of pipe-to-soil polarized
potentials with time.
Ecal
V
Ip
Ical
Rp/l
L
where: Ip = Icp ± It
Figure 4-47: Four Wire Test Lead Arrangement for Measuring Pipe Current
4.5
Summary
In order to maintain effective corrosion control on relatively long coated pipelines
that have high leakage resistance and that are located in latitudes close to the
magnetic poles and therefore subjected to telluric currents, the following
measures should be taken:
• Maintain good electrical continuity throughout the system.
• Integrate mitigation facilities with the CP system to reduce the magnitude
of the telluric voltage fluctuations in both the positive and negative
directions.
• Install test station facilities incorporating coupons that can be used to
measure “telluric free” pipe-to-soil potentials.
• Install four wire test station facilities so that the pipe current can be
recorded with time.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:50
• Use data loggers that are time synchronized and apply a correction factor
to obtain accurate close interval pipe-to-soil data.
CP Interference
© NACE International, 2006
January 2008
Telluric Current Interference
4:51
Summary of Equations
[4-1a]
γ =
[4-1b]
Z0 =
[4-2]
dV
dx
page 4:6
Z
Y
page 4:6
= E − 1Z
page 4:6
= − VY
page 4:6
dI
dx
[4-3]
ZY
[4-4]
d2V
− γ 2V =
2
dx
[4-5]
d 2I
dx 2
I =
[4-6]
E
γE 0
V =
[4-7]
I =
[4-8]
page 4:7
− γ 2 I = − YE
( 1 + Ae
E
γ
dE
dx
( Ae
- γ ( x − x1 )
-γ ( x − x1 )
page 4:7
+ Be - γ ( x2 − x1 )
− Be -γ ( x2 − x1 )
)
)
V
V
E
− 1 e - γx − 2 e - γ ( L − x )
Z
Z0
Z0
V(x) = − V1e - γx + V2 e - γ ( L − x )
[4-9]
page 4:7
page 4:7
page 4:7
page 4:7
where:
[4-10]
V1
=
Z1
E
×
γ Z 0 + Z1
CP Interference
© NACE International, 2006
January 2008
and
V2
=
Z2
E
×
γ Z0 + Z2
page 4:7
Telluric Current Interference
4:52
E = VBZW
[4-11]
where:
Ε
v
BZ
W
=
=
=
=
the potential difference
the water velocity
the vertical component of the magnetic field
the width of the water channel
Fe° ⇒ Fe++ + 2e- (corrosion)
[4-12]
H 3 O + + e-
[4-13]
page 4:11
page 4:18
⇒ H2 + OH- (in deaerated or acidic soils)
page 4:19
⇒ 4OH- (in alkaline or neutral aerated soils)
page 4:19
or
[4-14]
2H2O + O2 + 4e-
[4-15]
4OH- ⇒ 2H2O + O2↑ + 4e-
page 4:21
[4-16]
2 H2O ⇒ O2↑ + 4H+ + 4e-
page 4:21
[4-17]
C = ( 4.7 ± 1.3) T+0.186
page 4:23
Vm = Ep + Ve
page 4:29
[4-18]
where:
Ve = Icp • Re
Vm = Ecp + Ve ± Vt
[4-19]
Io = Icp + It
[4-20]
page 4:30
page 4:32
[4-21]
Vo = VTR + Vt
page 4:32
[4-22]
Icp = Io – It
page 4:33
g anode =
[4-23]
[4-24]
where:
[4-25]
CP Interference
© NACE International, 2006
January 2008
1
R anode
=
2πL
1
×
8L
ρ
-1
ln
d
page 4:37
Vps = Vr ± ΔVf
page 4:44
ΔVf = Vfave ± Vf
page 4:44
Telluric Current Interference
[4-26]
Vps = Vm ± ΔVrs •
4:53
y
x
± ΔVrf •
x+y
x+y
page 4:46
Where: the ΔVrs and ΔVrf are the differences in potential compared to the
average potential [Vrfave and Vrsave] recorded at each location over
a period of time prior to the survey.
CP Interference
© NACE International, 2006
January 2008