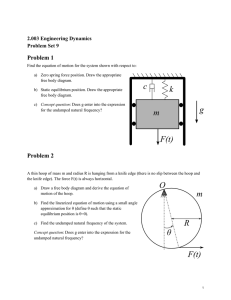
EXP #2 TORSIONAL VIBRATION CALCULATIONS 1) Torsional Vibration without damping : 𝐺𝐽 𝜏 2 𝐼= 2 ( ) 4𝜋 𝐿 𝐼 = 𝑆𝑒𝑐𝑜𝑛𝑑 𝑚𝑜𝑚𝑒𝑛𝑡 𝑜𝑓 𝑖𝑛𝑒𝑟𝑡𝑖𝑎 𝜋 𝐽 = 𝑃𝑜𝑙𝑎𝑟 𝑚𝑜𝑚𝑒𝑛𝑡 = 𝑑 4 , d = 6.2 mm 32 𝐺 = 𝑅𝑖𝑔𝑖𝑑𝑖𝑡𝑦 𝑚𝑜𝑑𝑢𝑙𝑢𝑠 = 80 𝐺𝑁/𝑚2 From fig.1 we can find 𝜏2 𝐿 = 0.0005 which represent the slope of the curve. 𝐽= 𝐼= 𝜋 ∗ 6.24 = 145.066 𝑚𝑚4 32 80 ∗ 145.066 (0.0005) = 0.147 𝑚𝑚4 4𝜋 2 length (mm) 0 480 502 601 730 830 10t (sec) 0 4.57 4.67 5.37 5.8 6.3 t 0 0.457 0.467 0.536 0.58 0.63 t^2 0 0.208 0.218 0.287 0.336 0.396 EXP #2 TORSIONAL VIBRATION fig.1 Torsional Vibration without Damping 0,45 0,4 period 𝜏^2 (sec) 0,35 0,3 0,25 y = 0,0005x - 0,0077 R² = 0,9941 0,2 0,15 0,1 0,05 0 -0,05 0 100 200 300 400 500 600 700 800 900 length (mm) 2) Torsional Vibration with damping: To find the logarithm decrement we use the next equation 𝛿= 2𝜋𝜉 √1 − 𝜉 2 = 1 𝑥𝜊 𝑥1 𝑙𝑛 = 𝑙𝑛 𝑛 𝑥𝑛 𝑥2 𝜉 = 𝑇ℎ𝑒 𝑑𝑎𝑚𝑝𝑖𝑛𝑔 𝑟𝑎𝑡𝑖𝑜 Experimentally we found the following data when the term √1 − 𝜉 2 ≅ 1 Levels 𝒙𝝄 𝒙𝒏 𝒏 𝝃 1 15 3 24 0.01067 2 11 4 15 0.01073 3 19 6 14 0.01310 EXP #2 TORSIONAL VIBRATION DISCUSSTION 1- Discuss the source of inaccuracies for both parts of the experiment? - The machine itself may has a small deviation from the correct way of installation and fixing in its jaws over the years. - Human errors will cause a source of inaccuracies such as not taking the time properly, not holding the wheel in the right way can make inaccuracy in length readings. - For the second part the installation of the oil container can be unstable which therefore will cause the wheel to touch the container and add an extra unwanted damping. 2- Mention another method to estimate the moment of inertia for a wheel then compare with the method of this experiment? - We can divide the wheel into equal parts and calculate the moment for each part as the following then adding them together total kinetic energy is K = ½ (m1r12 + m2r22 + …)Ω2 = ½ (∑miri2)Ω2 The sum of the products of the masses of the particles by the squares of their distances from the axis is I = ∑miri2 So the kinetic energy of the entire rigid body can now be written as, K = ½ I Ω2 We integrate I for a rigid body with a continuous distribution of matter EXP #2 TORSIONAL VIBRATION I = ∫r2dm And calculating it for a uniform solid cylinder rotating about a central diameter we find: I = MR2/4 + ML2/12 3- Give some practical applications for the torsional vibration? Torsional Model of a Compressor Drive Train Turbomachinery drive train Synchronous Electric Motor Drive Trains 4- Discuss the effect of increasing oil viscosity on the damping factor? - The resistance offered by the fluid to the moving body it what leads to the absorption of energy and that depends on many factors including the viscosity, when the viscosity increases the damping ratio will increase along with the change of harmonic motion.