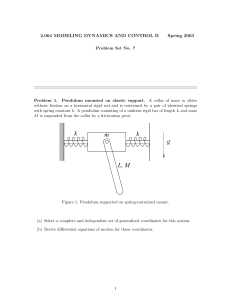
Kafrelsheikh University Faculty of Engineering Theory of machines Lecture No. 3 Four-bar mechanism Dr. Taher Atia Grashof ’s Criterion • Grashof’s theorem states that a four-bar mechanism has at least one revolving link if s+l≤p+q Conversely, the three nonfixed links will merely rock if s+l>p+q Where: s = length of the shortest link q = length of the other intermediate length links p = length of one of the intermediate length links l = length of the longest link Categories of four-bar mechanisms. A- Double Crank The shortest link configured as the frame B- Crank rocker The shortest link configured adjacent to the frame Crank rocker application Rear window Wiper mechanism Click here for a video C- Change Point Click here for a video s+l=p+q a parallelogram linkage D- Double rocker The link opposite the shortest link configured as the frame E- Triple Rocker • s+l>p+q • The triple rocker has no links that are able to complete a full revolution. • All three moving links rock. Double rocker V.s Triple Rocker Mechanism Click here for a video All four-bar mechanisms fall into one of the five categories listed in Table 1.2 Example: Classify the motion of this four-bar mechanism (Nosewheel assembly) based on the configuration of the links. Kinematic diagram s = 12 in.; l = 32 in.; p = 30 in.; q = 26 in. s+l < p+q (12+32) < (30+26) 44 < 56 (yes) The shortest link is a side, or adjacent to the frame. Nosewheel assembly is a Crank-Rocker (Case 2) Example: • Determine the number of fully rotating cranks in the planar mechanisms shown below. Show your calculations Solution of (a) l = 3.0 in s = 2.25 in p = 3.0 in q = 2.5 in s+l <p+q 3+ 2.25 < 3 + 2.5 Grashof type 1 5.25 < 5.5 ❑ Choosing l as the frame results in a double rocker with two fully rotating cranks. ❑ Choosing l, p or q as the frame results in a crank rocker of double rocker with one or zero rotating cranks, respectively SLIDER-CRANK MECHANISM • Also consists of a combination of four links manual water pump Find mobility?? kinematic diagram Click here for a video SPECIAL PURPOSE MECHANISMS Straight-Line Mechanisms • Permits a point to travel in a straight line or nearly straight-line motion without being guided by a flat surface Click here for a video A- Watt linkage • Quality prismatic joints that permit straight, smooth motion without backlash have been difficult to manufacture Click here for a video B- Peaucellier-Lipkin linkage Parallelogram Mechanisms • Consist of links that form parallelograms to move an object without altering its pitch • Create parallel motion for applications such as balance scales, glider swings, and jalousie windows Click for a video a scissor linkage Drafting machine linkage Walking Mechanisms Click here for a video Quick-Return Mechanisms They are commonly used on machine tools that require a slow cutting stroke and a fast return stroke. a crank-shaper linkage Shaper machine Click for a video Scotch Yoke Mechanism • Converts rotational motion to linear sliding motion, or vice versa. • In comparison to the slider-crank, the scotch yoke has the advantage of smaller size and fewer moving parts • Experience rapid wear in the slot Click for a video TECHNIQUES OF MECHANISM ANALYSIS 1. Traditional Drafting or Graphical Techniques • Old method, imprecise. • Drafting equipment was used to draw the needed scaled lines at specific angles such as (triangles, parallel straight edges, compasses, protractors, engineering scales). • However, with proper attention to detail, accurate solutions can be obtained. • This method illustrates the concepts behind graphical mechanism analysis • By using traditional drawing techniques, you can concentrate on the kinematic theories and learn CAD commands easily 2. CAD Systems • such as AutoCAD, have the capability to draw highly accurate lines at designated lengths and angles. • the lines do not need to be scaled to fit on a piece of drawing paper Inventor, SolidWorks, and ProEngineer - useful for planar kinematic analysis. - Geometric constraints, such as length, perpendicularity, and parallelism, need to be enforced when performing kinematic analysis. - These constraints are automatically executed in the solid modeler’s sketching mode 3. Analytical Techniques • Achieves precise results. • Advanced analytical techniques often involve intense mathematical functions. • Disadvantages: • The calculations is often difficult to visualize. • This approach does have the drawback of laborious calculations for more complex mechanisms. 4. Computer Methods 1. Spreadsheets • Very popular for routine mechanism Problems). • A cell containing input data is changed, all other results are updated. • This allows design iterations to be completed with ease. • For complex problems, they can be difficult to manage on a spreadsheet 2. Commercially available dynamic analysis programs: • Working Model, ADAMS (Automatic Dynamic Analysis of Mechanical Systems), Dynamic Designer 3. User-written computer programs in a high-level language, such as Matlab, Mathematica, VisualBasic, or C++ • Due to the time and effort required to write special programs, They are most effective when a complex problem needs to be solved • Not commonly encountered References • David H. Myszka, Mechanics & Mechanisms, Applied Kinematic Analysis Thank you