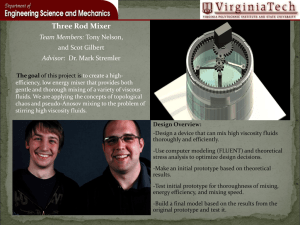
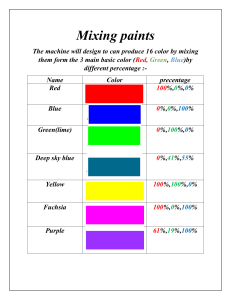
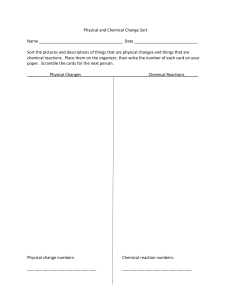
1 Recent developments in rubber mixing and cord calendering in tyre production Gerard Nijman Sport cars with a maximum speed of higher than 270 km/h and sport utility vans are widely available nowadays. Tyres for these cars have to fulfil very tough requirements regarding car handling, safety and grip as well as slip resistance under extreme road conditions. Environmental regulations limit the freedom of possibilities in tyre design. Introduction of silica tyres by almost every premium tyre manufacturer in the early nineties of the last century meant a big step forwards in tyre performance. Especially on wet, snowy and icy road conditions. A very good understanding of the tyre manufacturing process is precondition for a capable production of these very high performance tyres. Tyres are produced in 4 production steps. Before tyre moulding and vulcanisation the tyre has to be built on tyre building machines out of various components. Tyre components are made on extrusion lines or calendering lines. The first step is the mixing of rubber compounds out of raw materials such as natural or synthetic polymers, fillers, process oils, curing systems, chemicals etc. The present chapters deals with recent developments of rubber mixing and calendering. Rubber extrusion is discussed elsewhere in this book. Although it dominates rubber mixing in the last ten years, the mixing of silica filled tread compounds is only slightly discussed in this chapter, since another chapter in this book totally covers the mixing of silica compounds. Introduction on rubber mixing For almost a century rubber compounds are produced by internal mixers. These mixers are batch mixers. Fig 1 shows the concept of an internal mixer. It is characterised by a mixer entry chute through which the material can be fed. The ram or floating weight pushes the raw material towards the mixing chamber. The mixing chamber has got the shape of a horizontal “8” in which 2 rotors counter rotate. At the bottom a drop door can be opened to discharge the stock into a downstream device. If both the ram and drop door are closed the mixing process is taking place in a closed mixing chamber. All the material take part at the mixing process. Basically two rotor types are applied in the internal mixer. The tangential rotor type and the intermeshing rotor type. The latter one interferes with the adjacent rotor and turns at the same rotor speed compulsory. In the drop door or through the side plates a thermo couple is mounted 2 to record the temperature of the rubber. The mixing chamber, both rotors and the drop door are temperature controlled by means of a closed loop water control. The positive effect of steady thermal conditions on batch to batch uniformity has been reported by Melotto1. The material flow in an internal mixer is oriented vertically. On top of the internal mixer a more or less sophisticated feeding system can be found. Underneath the mixer a downstream device, such as an sheeting extruder with one or two tangential screws, or two roll mills are placed The shape of the mixer entry chute allows the feeding of raw materials in almost any trade form. Rubber bales, the most widely used trade form for rubbers and polymers, can be fed as one piece in an industrial sized mixer. Feeding of material is very convenient, especially for tangential type of mixers. By recording the motor power, the temperature and the position of the ram the progress of the mixing process can be followed. Such a diagram of a complete mixing process is called a fingerprint of the batch. The integrated power, which is the total energy input, can be added in the fingerprint. Fig 2 shows a typical fingerprint for a masterbatch produced on an industrial sized mixer. It is characterised by a high temperature increase and a highly fluctuating power input. It can be clearly seen that the mixing process is highly non isothermal. The maximum temperature determines the total mixing time. The concept of the internal mixer is well accepted in the rubber industry, especially for the production of masterbatch compounds. Within a variety of materials the deformation of rubber compounds is relatively difficult due to the very high viscosity. Mixing devices have to be strongly powered and have to be designed in a very robust way in order to withstand the very high forces and momentum acting on the device. The most important benefits of an internal mixer are - compact however robust design - wide mixer entry chute to adopt almost any supply form of the raw materials - therefore relatively low raw material prices, since special preparation and handling devices during raw material production are not needed - closed mixing chamber to enable a clean and dust free rubber mixing The high price for these benefits of the internal mixer is the batch wise production of rubber compounds. This leads to quality variations and batch non uniformity. The temperature increase 3 of the compound limits the mixing process and therefore the mixing quality. Eventually the mixing quality is so poor that an extra mixing step, remilling, is needed. In most cases the curing system can only be supplied during a separate, final batch mixing, step because curatives can only be processed below 100-110°C . It is well known that the rheo curve, a diagram in which the curing characteristics are given, is a fairly good measure to determine the consistency and uniformity of batch mixing. For an example fig. 3 shows rheo curves of a compound with the same recipe. This is generally regarded as a sufficient batch to batch consistency. Variations in curing characteristics are caused partly by variations in the mixing process. Viscosity variations and therefore variations in the compound’s processability can be expected as well. This yields variations in extruded profile cross section geometry. The effect of the mixing behaviour on the rheological properties of SBR compounds has been reported by Leblanc 2 Fig 4 shows the concept of the internal mixer proposed by Banbury3. It can be seen easily that the basic concept of the internal mixer did not change since almost 90 years. Obviously the advantage of the easily feeding is preferred above the rather poor between batch consistency. In the past 20-30 years material handling in mill rooms as well as the mixing process is highly automated. Also down stream equipment runs in an automatic control mode. As an example a typical lay out of a mill room is depicted in fig 5. Bulk materials and fluids are supplied by means of road tankers and transferred and stored in storage silos. On top of the internal mixer day bins can be found. The storage of the “daily” consumption of bulky materials is done very close to the mixer to allow short weighing and charging times and letting the materials come to the required ambient conditions. The elastomers are usually supplied in bales and have to be cut or granulated in order to meet the weighing tolerances needed for the next batch to be mixed. Charging of rubber usually is done through conveying belts. Small bags of chemicals and other small quantities of raw materials are pre-weighed offline and can be put on the same conveyor belt. The total volume of the raw materials is much higher than the volume of the rubber batch which is going to be produced out of it. This is because of the fact that especially fillers are containing 4 a lot of air. To avoid any material leaving unmixed out of the mixing chamber and to achieve the required mixing quality, the mixing chamber is principally under filled. The fill factor, which is a very important mixing parameter is defined as the ratio between the volume of the batch and the gross (“fluid filled”) volume of the mixing chamber. In other words Φ= m ρVmixer [1] in which Φ is the fill factor, m is the batch weight, ρ is the density of the compound and Vmixer is the volume of the mixing chamber. Typical values for the fill factor are 0,6 – 0,8 depending on the compound’s recipe and the type of rotors being applied. Especially in tyre manufacturing the mixing process has been optimised with respect to productivity. High rotor speeds combined with high fill factors enable to increase the productivity and are applied widely. Various text books deal with the mixing process in such mixers.4567. Many papers have been published which deal with the mixing quality obtained by means of batchmixers.8 9 10 It is well known that the compound quality is limited due to the energy balance, the flow behaviour in the mixer, and batch to batch variations. By a correct compound design one could correct for the influence of the mixing process on the final properties of such a compound. However the viscosity of the rubber compound and therefore its processability is depending on the mixing process as well. [..]11 12. This yields the maintaining of rather big geometry tolerances on extruded profiles13 and other products made of rubber. Various papers deals with the flow behaviour of the rubber compound in an internal mixer. Basically the mixed good is treated as a fluid in these papers[…]14 15 16 17 18. Flow visualisation studies have been published in which a laboratory mixing chamber has been made of Plexiglas and the mixing chamber is filled with a high viscous fluid. By adding tracers, the flow in an internal mixer can be visualised. Numerical simulations have been carried out by Regalia19, Hu20, Clarke21, Yao22 and Kim23. Although very interesting flow behaviours have been achieved by means of numerical simulation, calculation results differ significantly from observations made from industrial mixing processes, mainly due to the complex rheological behaviour of a rubber compound (disregarding the fact that during at least a rather big part of the masterbatch mixing process there is not any flow of a continuum as numerical fluid flow simulation requires.) A lot of free surfaces are existing due to the partially filled mixing chamber. As long as free surfaces 5 are very difficult to predict in numerical simulation, simulation and practise might differ quite tremendously. An analysis of the flow behaviour which is more or less confirmed by numerical simulations is presented by Leblanc. [14] The total flow in an internal mixer (tangential type) can be divided into a laminar, circulating flow which is pushed by the rotor tip, a axial directed flow, as an effect of the helix angle between axis and rotor wing and a leakage flow between rotor tip and mixing chamber wall (ref to fig 6) , or ϕ tot = ϕ lam + ϕ ax + ϕ leak [2] If the transport from the left rotor regime to the right rotor regime is taken into account, this equation is completed by ϕ tot = ϕ trans + ϕ lam + ϕ ax + ϕ leak [3] Laminar mixing is basically taking place throughout the mixing chamber. Because of the general lay out the rotor design axial flow is split up at the edge of a rotor wing, favouring distributive mixing. Dispersive mixing is mainly taking place in high shear zones e.g. between rotor tip and mixing chamber wall because for dispersive mixing a sufficient high normal or shear stress has to be applied on the particle to be dispersed. If ϕtr and ϕax are relatively large with respect to the flow contributions, distributive mixing is favoured. The narrower the clearance between rotor tip and mixing chamber wall, the higher the shear forces will be. However ϕleak the contribution of the total flow in the dispersive mixing region will be smaller as well. The dispersion effect of an internal mixer should be understood by optimising the chance that every part of the batch will flow over the rotor tip combined with a sufficient high shear forces in the dispersive region. Mixing by means of internal mixers The mixing process in an internal mixer. It is well known that the cycle time of the mixing process in an industrial sized internal mixer is 6 limited by the increase of the compound temperature. For example typical mixing times on a 400 litre tangential mixer with 4 wing rotors is of the order 200 sec as can be derived from fig. 2. Especially during the last mixing phase the temperature of the compound is approximately 1 degree centigrade per second. The cost price of rubber mixing is determined by the prices of the applied raw materials, the direct machine and labour costs as well as overhead costs such as depreciation, maintenance and indirect labour costs. If mixing times should be shorter or the fill factor would be higher the throughput of the mixer line would be higher, however it is well known that mostly the degree of mixing (e.g. carbon black dispersion) would be lower. Wiedmann and Schmidt [8] have shown that increasing the fill factor of a mixing process beyond the optimum value leads to a tremendous decrease of the filler dispersion quality. It can be explained by the fact that the mixing chamber is overfilled and the floating weight will not come to its closed position during the mixing cycle. It means that a part of the raw materials will remain in the entry chute and will not being mixed well into the batch. On the other hand Büker has shown that remilling of a tyre tread compound lead to both better carbon black dispersion and processability of the compound on extrusion lines 24. It is expected that reducing of mixing time and overfilling the mixing chamber will lead not only to a (slight) higher productivity but also to a poorer quality, more rejected production and higher scrap rates. To achieve costs improvement in the mixing operation a sort of hyperbolic relationship between productivity and mixing quality has to be taken into account. By reducing the rotor speed, for instance, a lower temperature increase can be expected, due to less friction losses, and therefore a longer mixing time and more intensive mixing. In other words, a better mixing quality leads in this case to a lower throughput. 7 The mixing process generally starts with the charging of (a part of) the raw materials into the mixing chamber, followed by putting the floating weight down to the mixing chamber. After following the mixing cycle procedure, finally the mixing process ends by opening the drop door and discharging the batch into the downstream equipment. For masterbatch mixing the most important mixing cycle is depicted in fig 7. This mixing cycle is well known as the straight mixing process. Upside down mixing is in some cases preferable especially if large quantities of process oil have to be mixed into the compound. With upside down mixing first the fillers are charged first, followed by process oil and polymers. This process will not be disclosed in this chapter. A typical finger print of the mixing process is given in fig 8. in which the corresponding phases of the mixing cycle of fig 7 are given as well. The finger print is a diagram in which the power supply, the signal of the thermocouple, the rotor speed and the position of the floating weight is given as a function of the progressing mixing time. The phases of the mixing process can be easily recognised from this diagram. After charging the polymers, the floating weight comes down to its lowest position almost immediately, because in this stage of the mixing process the mixing chamber is rather underfilled. During the first “ram down” phase, the polymers are being plasticated and blended. At the end of this phase a more or less homogeneous blend can be observed. After lifting the floating weight the fillers are added into the mixing chamber and it takes a while before the floating weight reaches its lowest position, due to the low bulk density of the fillers compared to its density. If the ram comes down almost direct after closing the mixing chamber, the fill factor has been chosen too low and a less optimal mixing quality can be expected. At the other hand, if the ram does not come to its final position before the process oil is being injected, the mixing chamber is overfilled and especially the filler dispersion is expected to 8 be poor. After oil injection the power input drops, since the process oil initially acts as a lubricant between rubber batch and mixing chamber wall. However after reasonable time the process oil has been incorporated, which can be seen from the increasing power supply. A cleaning action (lifting and lowering the floating weight) is followed by the last mixing phase in which ideally the power input reaches a horizontal asymptote, indicating that every material has been incorporated and filler dispersion is proceeding, according to a study of Leblanc [14] A typical example of a fingerprint of a final batch mixing process is given in fig 9. Leblanc also refers to a second power maximum after adding the fillers. It principally indicates the completion of filler incorporation. In industrial mixing, however, this second power peak is often confused with an arbitrary power maximum when finally the floating weight comes to its lowest position (refer to fig 10) Especially in intermeshing mixers, the inter clearance region between the two rotors can cause a temporary material jam, which results into a slight lifting of the ram. As soon as the material has been taken into the region between rotors, mixing chamber and drop door the floating weight is able to come to its lowest position. Clearly recognisable is the big fluctuation of the power supply. During the phases in which the power input is high, mixing action is taking place together with a remarkable temperature increase. Balancing the power input with the enthalpy increase of the compound and mixer body, drive losses gives the heat flow into the cooling system of the internal mixer. A typical energy balance of a complete mixing process can be found in fig 11. Less than 50% of the power input can be cooled away during typical masterbatch mixing. If the rotor speed is reduced until rather low speed a (more or less) isothermal mixing process can be achieved. Isothermal mixing is favoured 9 for achieving a high dispersion quality and/or high degree of hydrophobation during silica mixing [10] [..]25 26 Intermeshing mixers show a larger mixer & rotor surface – mixer volume ratio compared to a tangential mixer. It means that the cooling performance of intermeshing mixers is principally better than tangential mixers. However charging and discharging of intermeshing mixers is poorer compared to tangential mixers. Both effects lead to a longer mixing and cycle time compared to a tangential mixing process with similar batch weight. A typical fingerprint of a masterbatch mixing cycle can be found in fig.12. The differences between fingerprints of similar compounds mixed in intermeshing mixers compared to tangential mixers are characterised by - a poorer intake of fillers - a lower temperature increase during mixing phases - and therefore a bigger cooling energy to power supply ratio - a poorer discharge after the drop door is opened - more generally, by a longer cycle time Mixing of silica compounds Today, modern tyres have to meet very demanding handling requirements with respect to grip and skid under wet, snowy or icy conditions. Rolling resistance shall be as low as possible and a high mileage will become more important because of environmental reasons. It is necessary to apply silica filled tread compounds based on S-SBR and High cis BR polymers in high performance tyres27 . The mixing of these compounds is complicated because the silica has to be hydrophobated by means of silane, e.g. TESPT28. This chemical reaction, also called the silanisation reaction lasts long with respect to mixing times and temperature may not rise too 10 high (it is said that the reaction temperature may not exceed 160C in order to avoid secondary reaction effects) It therefore requires 1 or 2 remilling phases to complete the silanisation process. Although extensive discussed elsewhere in this book the mixing of silica compounds on industrial sized mixers should be discussed here as well, especially in the context of the cooling performance of industrial mixers. Silica compounds are mixed preferably in intermeshing mixers with variable and adjustable rotor speeds. Since the hydrophobation reaction is influenced by the content of ethanol (a split off product from this reaction) and by the moisture content, it is required to lift the floating weight several times during one mixing cycle. A typical masterbatch mixing cycle for S-SBR Silica Silane compounds on a 320E internal mixer is given in fig 13. in which clearly can be observed that the temperature increase is limited by lowering the rotor speed. The application of two roll mills in the downstream of such mixing lines is preferred, especially if the two roll mills are equipped with stock blenders (fig 14). After discharging the rubber batch will be sheeted on the two roll mill. By putting the sheet through the stock blender, the free surface from which the ethanol and moisture can be evaporated, is rather big, allowing the chemical reaction to proceed even at somewhat lower temperatures. A study of Zuuring e.a.29 [..] has shown that a smaller mill clearance setting and a longer milling time yield in better silanisation conditions. This study also has shown that by proper two roll milling after mixing in an intermeshing mixer, one remill step can be eliminated as can be recognized from fig 15. It is interesting to study the mixing process of masterbatch mixing with remilling and final batch mixing. Within masterbatch mixing the filler incorporation phase can be compared with the after mixing phase. A typical tyre tread formulation has been mixed in three steps on a Kobe Steel BB 11 270 tangential mixer equipped with 4 flighted rotors of Mark H ii. The mixing procedure for masterbatch mixing, remilling and final batch mixing is given in table 1. Fingerprints including power supply and records of the thermocouple have been analysed as follows: - during the black incorporation phase, the aftermixing phase, the second part of the remilling phase and the second part of the final batch mixing phase, an average power consumption has been taken - At the same phases the average temperature increase has been derived. - With the assumption that the specific heat of the compound is 1700 J/kg/K, the compound enthalpy increase per second has been estimated by means of ∆H ∆T = mcv ∆t ∆t [4] in which ∆H is the enthalpy increase of the batch during time frame ∆t, ∆T the corresponding temperature increase of the batch, m is the batch weight and cv is the specific heat of the compound. - The ratio between average power and enthalpy increase per unit of time is compared between the various mixing phases. - the area of the total cooling surface of the mixing chamber and the rotors is estimated to be 6 m2. The temperature of the cooling water was 30C. The heat flux can be calculated by dividing the cooling power by cooling area, or ∆Pinput − ∆H P Θ cool = cool = A A∆t - [5] The heat transfer coefficient from the rubber batch to the cooling water can be estimated by dividing the heat flux by the difference between the average rubber temperature and the cooling water temperature, or α th = Θ cool [6] Tav ,batch − Twater Fig 16 shows the fingerprints of the masterbatch mixing process, remill process and final batch mixing process. The derivation of the data as mentioned above is clearly shown in the fingerprints. The results are summarized in table 2. What can be seen is that cooling power is 12 approximately one third of the total power supply. Since the masterbatch cycle time is remarkably longer than the remilling time, it seems that the cooling effect during masterbatch mixing is poorer with respect to remilling and final batch mixing. Hence it is found that during filler incorporation there is hardly any heat transfer from rubber to mixer. It can be explained by the fact that during filler incorporation the mixed good is not a continuum, but there is still a lot of (isolating) loose fillers available. This study leads to interesting conclusions: - Masterbatch rotors should be designed in order to incorporate the fillers and additives as efficient as possible - Remill batch and final batch rotors should be designed in order to favour distributive mixing and, hence, optimised cooling effect. - The masterbatch mixing cycle should not be extended too long, but, in case of demanding mixing quality requirements two short mixing cycles, i.e. masterbatch mixing and remilling might be more efficient than one extended masterbatch mixing cycle without remilling. A similar study of a masterbatch mixing process on an intermeshing mixer (Harburg Freudenberger GK320E with PES 3 Rotors (former Krupp, Werner & Pfleiderer mixer concept) resulted in similar heat transfer coefficients and slightly more effective cooling due to higher cooling surface availability per unit weight of rubber batch.) The mixing details can be found in table 3. In literature, some heat transfer coefficients from rubber to cooling water in an internal mixer can be found, e.g.30 and 31. The present heat transfer coefficients are in the same region as referred in literature. Wiedmann and Schmidt found a rather huge dependency of the heat transfer coefficient on the rotor speed. This can be explained by the fact that every time a rotor tip passes the mixing chamber wall, it leaves a thin layer of hot material to the wall, which is refreshed after the next tip passage. Knowing this, the benefits of the cooling effect of an intermeshing mixer with respect to the tangential type should be seen at same rotor speed. In other words, the cooling performance of an intermeshing mixer at low speed might be poorer than the cooling effect of a tangential mixer at high rotor speed. 13 Optimizing the mixing process can be done by studying the fingerprints. Schlag e.a.32 has presented a study to the influence of the duration of each mixing phase on the carbon black dispersion quality of a NR/SBR/BR/N375 based tread compound. By observing the visual appearance of the compound at several phases during masterbatch mixing on a GK 45 E mixer he could distinguish the following appearances: α: Start of the mixing process: Polymers are dosed in lumps β: Power input is going through a minimum. The structure of the blend is crumby and pigeon egg size BR lumps are still visible. γ: The polymer blend shows a homogeneous appearance. A: Floating weight is down. The power input shows a peak. Carbon Black is mainly loose and the incorporation into the polymers has just started. B: The power input goes through a minimum due to the rising of floating weight (material jam in the inter rotor zone) A lot of loose black is visible C: The floating weight has come to its lowest position. The power runs through a 2nd peak. Carbon black dispersion is poor. Loose black visible D: (power minimum) E: Carbon Black incorporation completed. Dispersion quality is reasonable. In an experimental design the duration of the blending time was chosen between β (30 s) and γ (60 s.) After 180 s the mixing process was stopped. The discharge temperature was approximately the same (160C) however the quality of the compounds differ tremendeously. The compound with the short blending time had a poor dispersion quality and some black was not yet incorporated. The mixing process of the compound with long blending time was completed, as the power chart shows (fig 18) In other words within the same mixing time, mixing quality can be improved by optimising the mixing phases during one mixing cycle. Recent developments in mixing equipment Although the basic concept of the internal mixer already exists for a long time, a couple of new developments in rotor designs and mixing concepts have been published33 34 35 36 37 38 39 40. In rotor designs 2 development directions can be recognised. The first direction is optimising the 14 cooling effect, in which the distributive mixing components of the flow (transport flow and splitting up of the axial flow) is being optimised37 39 40. This can be done by shortening the long wing and adding short wings in the middle of the rotor. The other direction is encouraging the incorporation of the material in the compound. Therefore the material has to force to come into the laminar region and the high shear region33 38 . A very long rotor wing or more long wings per rotor are needed to optimise the incorporation performance. A disadvantage is the relatively strong heat built up in the compound during mixing which might lead to an additional remill step in order to fulfil the mixing quality requirement. Alternatively two roll mills in the downstream of the mixing line might solve the problem of achieving the required mixing quality. Traditionally tangential rotors were 2 wing flighted (see fig 19.) One wing was large, starting from the first edge and another shorter wing started from the other edge. Later on 4 wing rotors were applied, by simply adding the same couple of wings 180 opposite. The incorporation and dispersion effect of such rotors is better compared to 2 wing rotors33 but also the temperature built up is higher, which might lead to an insufficient distributive mixing performance. This disadvantage was the motivation for more sophisticated rotor designs. Internal Mixer supplier Pomini has developed the HDM Rotor, a tangential rotor with 2 rotor wings placed to the edges and 3 somewhat smaller rotor wings, placed somewhere in the middle37. The HDM Rotor is given in fig 20. It is reported that distributive mixing performance is better compared to traditional rotor geometries, which can be understood by analysing the transport flow and the splitting up effect of the axial flow. A similar trend can be observed in rotor designs made by Harburg Freudenberger40 , which are depicted in fig 21. On the other hand, Farrel reported the development of the ST rotor33 35 . The ST rotor is four 15 flighted (see fig 22), but the opposite long wing starts from the opposite edge, resulting in a more aggressive mixing performance (better incorporation performance however higher temperature built up) The effect of heat built up is reported to be controlled by the synchronous technology, which Farrel applies. It means that both rotors rotate with the same speed. The orientation of the rotors is detemining the effect of heat built up33. Kobe Steel reported 2 rotor developments. The first development is an improvement of the 4 flight rotor by extending the long rotor wing until 4 times the short rotor wing, see fig 23. As for the ST rotor it can be run in even speed or with friction. The performance improvement can be found in a higher incorporation and better dispersion effect38. Another development is the 6 wing rotor (refer to fig 24). The reported excellent dispersion effect might be disturbed by a rather extreme temperature built up during mixing. In order to reduce this effect the clearance between rotor tip and mixing chamber wall is divided in 3 sections: small clearance, moderate and “large” clearance38. Pomini reported that their VIC technology combines the fair raw material intake behaviour of the tangential mixer with the excellent dispersion and cooling behaviour of an intermeshing mixer. The VIC mixer is an intermeshing mixer in which the distance between the two rotors can be varied during mixing. Power input can be controlled better, it is said41 42 43 44. During masterbatch mixing the interclearance section between the two rotors can be maximal. After material intake and incorporation, the interclearance section can be reduced by reducing the distance between the two rotor axes, which leads to better dispersion performance. Peter has presented the tandem mixing concept in a series of papers45 46 47 48 49 50. The concept consists of an internal mixer which is placed on top of an over sized intermeshing mixer operated without a ram, see fig 25. After masterbatch mixing the batch is being charged in the 2nd mixer. 16 Due to the size the fill factor of the lower mixer friction losses in the compound are lower than the cooling performance, allowing the compound to cool down. After cooling down until a sufficient level, the curative system can be added into the bottom mixer. If the bottom mixer should be of a tangential type the cooling effect as well as the distributive mixing performance (needed for mixing of the curative system) is poor. While the next masterbatch is mixed in the top machine, the final batch is being produced in the bottom machine. Needles to say that the tandem mixing concept can be applied for other purposes like remilling as well. Research trend: Continuous mixing One of the main disadvantages of batch mixing in internal mixers is the relatively poor batch to batch uniformity51 as well as difficulties in material handling and their impact on compound and product quality varation52 53 54 55 56 57 . It is well known from thermoplastics processing that continuous mixed compounds are very consistent and very narrow tolerated. However the feeding of such devices requires free flowing feed stock. Obviously such raw materials used to be rarely available for rubber compounds. Recently powdery rubber became available.58 59 Research work on continuous mixing of rubber compounds have shown that the degree of mixing could be very high and its variation is remarkably low60. Continuous mixing of rubber compounds has gained attention recently. Especially since Pirelli announced the continuous compounding mixer61. In this section an overview on available technologies for continuous mixing and to compare its benefits with traditional batch mixing is given. Further work to be done before continuous mixing is widely accepted and an outlook in the next future will be discussed as well. In the last twenty years several attempts have been made to apply continuous mixing devices for the production of rubber compounds. The following devices have been applied with more or less success: - Single rotor continuous mixer62 17 - Co rotating twin screw extruders61 - Counter rotating twin screw extruders66 - Multiscrew extruders67 - Planetary gear extruders68 The single rotor continuous mixer basically consists of a feeding extruder and a mixing extruder and is fed with free flowing materials. The first device is a proper preheating and densifying device, based on a single screw extruder. It feeds its material into a distributive mixing and homogenizing device with moderate shear zones to avoid a too strong heat built up. After that the dispersive zone can be found in which each material part is subjected to high stress events between cylinder and single rotor60. Co rotating twin screw extruders are widely applied in the compounding of thermoplastics. The extruder consists of 2 screws which intermesh each other. The screw concept consists of modules with different screw elements. Fig 26 shows typical examples of screws which are applied in twin screw extrusion. Fig 27 shows typical screw elements which have been used in twin screw extruder applications in rubber compounding. A few attempts to apply co rotating twin screw extruders into rubber mixing were reported 63 64 65 66. The first report deals with the mixing of rubber out of raw materials which were supplied in their normal trade form. Polymers were granulated just prior to their feeding into the extruder. The other three reports deal with the mixing of powder rubber and the main results obtained were a very high degree of dispersion and a remarkable consistency. The basic outcome of these papers is that from a technological point of view it is possible to mix rubber compounds by means of counter rotating twin screw extruders. Limper and Keuter proposed a model for the pressure built up along the screw axes of a co rotating twin screw extruder67. They assumed that such a device can be presented as a series of reaction vessels. A typical result of a model calculation is shown in fig 28. It can be clearly seen that the co rotating twin screw extruder is a poor pressurizer. This is well known from practise. Counter rotating twin screw extruders are applied in PVC compounding and processing. This concept has been used by Farrel for rubber mixing and they call this aggregate the Farrel Continuous Mixer68. The concept, shown in fig 29, consists of a short feeding zone, a mixing zone which looks similar to typical rotor design as applied in tangential internal mixers and an adjustable orifice gate. The feeding of the mixer is starved. The residence time in the mixer and hence the degree of mixing is determined by the discharge orifice gate. Although high degree of 18 mixing can be achieved, due to its low throughput rate, this concept did not find a wide application. Multiscrew extruders like the Bühler Ring extruders are proposed to be applicable for continuous rubber mixing as well69. This extruder type is in fact an extension of the co-rotating twin screw extruder, refer to fig 30. Several screws are arranged in a ring and 2 adjacent screw intermesh each other, creating relatively more shear zones than twin screw extruders at similar throughput ranges. In order to achieve the same mixing degree a shorter extruder could be applied with respect to twin screw extruder, but a homogeneous feeding seems to be less beneficial. Planetary gear extruders are widely applied in PVC processing, since its said favourable temperature control70. The concept is shown in fig 31 and exists of a main screw, partially responsible for the feeding and partially acting as a drive for various gears which rotate between the drive and the barrel. The pressure built up is very poor; a gear extruder or a single screw extruder should be added in order to pressurise the rubber. Luther reported the mixing effect of a planetary gear extruder when preparing silica compounds using E-SBR silica rubber filler composites71. Among other devices the Farrel MVX extruder seems being applied successfully at least in some niches of rubber mixing72. It basically consists of a single screw venting extruder and in its upstream a sort of tangential mixing unit. (Refer to fig 32) The screw speed together with the rotor speed determines the mixing degree. The feeding units and the reciprocating ram determine the throughput. Tab 4 contains all benefits and disadvantages of batch mixing with respect to continuous mixing. Tab 5 contains basically the same for continuous mixing with respect to. The major advantages of internal mixers is 1. it accepts almost any trade form 2. it is widely applied for several decades. It is based on proven technology. The disadvantages of the internal mixers are benefits of the continuous mixer, namely 3. the absolute degree of mixing is not very high and 4. the between batch uniformity is poor, especially at high throughput requirements So if raw materials should be available in free flowing form, continuous mixing could be applied in order to ensure high quality compounds. Another benefit of continuous mixing is the better temperature control. This enables the control 19 of a chemical reaction, if any, and the application of thermal sensitive raw materials, which cannot be used in internal mixers. Today it can be stated that continuous mixing can be applied for rubber compounding successfully. The very recent announcement of the CCM (Continuous Compounding Machine) by Pirelli shows that the benefits of continuous mixing has found evidence73. The basic precondition of applying continuous mixing devices is the availability of all raw materials in free flowing form in order to achieve a controlled feeding of the aggregate. Either the polymers or rubbers have to be supplied as powders or granulates or advanced granulator techniques (including anti tacking facilities) have to be applied. Continuous Mixing of rubber compounds is a very promising method in order to obtain a more consistent quality at very high levels. (e.g. better dispersion and far better consistency) However, neither are present trade forms of traditional raw materials suitable for continuous mixing processes nor R&D activities on this subject have been reported so far. Powdery rubber is an excellent material for continuous mixing but replaces traditional raw materials as a special engineered material. A break through of application of continuous mixers in rubber mixing cannot be expected until the performance of the final product desires a substantially more consistent mixing quality. A FUNDAMENTAL APPROACH OF THE CORD CALENDERING PROCESS Introduction Calendering is one of the oldest rubber processing technologies. It is known that coating of fabrics is done for almost 200 years. Steel cord and fabric cord topping is one of the processes in tyre manufacturing. Specifications and tolerances of calendered cords are very tough. Especially the thickness variation across the calendered ply and the cord density (end count) are rather difficult to fulfill. Modern calender lines are very complicated in order to fulfill the requirements. Despite that there is rather little research work done in the field of rubber calendering. The 20 intensity of research reduced when extruders started to get more common in the seventies. Although calenders have been applied for almost 200 years there are only a few attempts to interpret the calendering process in a technological way. The product quality, however, is related to the calendering process. Thickness gradients across the calendered product, thickness variations along the product as well as cord density distribution determine the quality of the product and are tremendously related to the process parameters. Typical requirement figures of coated steel cord or fabric cord sheets as applied in the tyre industry are: Cross section Thickness: 0.4 - 2.5 mm ± 0.05 mm Width: 900 - 1450 mm ± 0.5 mm/m Porosity: not allowed Blisters: not allowed Cord density Number of cords 60- 150 cords per 10 cm Missing cords 3 cords/10 cm for textile cord / 1 cord/10 cm for steel cord Off Balance max 0,01 mm Weight: ± 50 gr/m2 Cord tension until 20 kN per total width Cord tension variation± 250 N per total width both in calendering direction and across The purpose of this section is to explain in a qualitative way how the product quality is related to the calendering parameters. Therefore a simplified calender model is presented. The model 21 describes the pressure built up in the calender nip region as a function of compound viscosity, clearance, calender line speed, rolling bank height as well as geometrical data. The general lay out of a typical steel and fabric cord calender is explained by means of the result of the presented calender model. Clearance flow between 2 rolls The calendering process can be described by means of a combined drag and pressure flow. The rotating rolls of a calender drag the rubber through the calender nip. The clearance as well as viscoelastic properties determine the sheet thickness. The flow in the clearance of two parallel rolls is visualised in fig 33. Two adjacent and parallel placed rolls are counter rotating. Both rolls drag the material in the converging region of the calender nip through the clearance. The flow is highly converging, which means that a high pressure will be built up. A part of the dragged material is pushed back by the pressure flow. The result is a rolling bank in the calender nip region, which can be observed quite easily. The nip pressure causes a nip force and therefore roll deflection. A first model of the calender nip flow has been presented by Ardichvilli74. Furtheron Gaskell presented a more precise and well known model75. Both models are very simplified, which yields that the flow is Newtonian and isothermal, and they predict that the nip force is inversely proportional with the clearance. Since rubber materials show a shear thinning behaviour Ardichvilli’s model seems not to be very realistic. The purpose of this section is to present a calender nip flow model based on the power law. The model is still being considered isothermal. Such a model was first presented by McKelvey76. The present approximation of the force, acting on the roll surface, following assumptions are 22 made: 1. a 2 roll calender with symmetrical rolls 2. nip force deflects the rolls. No lateral roll movement 3. the compound has a uniform temperature. Viscous heating is neglected 4. the rolling bank in the nip is small compared with the roll diameter 5. the rheological behaviour of the compound can be described by the well known power law h(x) describes the distance between the surface given by y = 0 and the roll surface. The resulting force on the calender roll can be estimated as follows: Let p(x) be the pressure as a function of the distance x from the calender nip perpendicular to the calender axes. The co-ordinate y describes the distance from the centre of the clearance to the roll axis. The equation of motion in this case can be reduced to dp dτ = dx dy (7) in which τ represents the shear stress. Applying the power law as material function and two times integration with respect to y yields: 1 n +1 n +1 ⎞ n ⎛ 1 dp ⎞ n ⎛⎜ n v( y ) = ⎜ ⎟ ⎜ y − h n ⎟⎟ + U n + 1 ⎝ m dx ⎠ ⎝ ⎠ (8) using the boundary condition that at y = h, v(h) = U and using symmetry at y = 0. The throughput through the calender clearance per width unit is given by the integral of equation (8): 23 1 Q 2n ⎛ 1 dp ⎞ n = ∫ v( y )dy = ⎜ ⎟ h W −h n + 1 ⎝ m dx ⎠ h 2 n +1 n + 2Uh (9) At a undefined position x* the pressure gradient will vanish since obviously the pressure is maximal. The applicable distance between the two roll surfaces is 2h*. The throughput at that position is given by the following expression: Q = 2Uh * W (10) Combining both equations (9) and (10) yields into an explicit equation for the pressure gradient: n −1 ( * n h − h* dp ⎛ 2n + 1 ⎞ h − h U⎟ = m⎜ dx h 2 n +1 ⎠ ⎝ n ) (11) The pressure through the calender nip is determined with this equation. The distance from the calender flow centre line to each roll surface is given by ⎛ D D 2 x 2 ⎞⎟ h = h0 ⎜1 + − − 2 2 ⎜ 2 4 h h0 ⎟⎠ 0 ⎝ which can be approximated by means of the binomial theorem by (12) 24 ⎛ x2 h = h0 ⎜⎜1 + ⎝ Dh0 ⎞ ⎟⎟ ⎠ (13) In fact a parabolic surface of the rolls in the flow region is assumed, which is valid as long as the rolling bank diameter is small compared with the roll diameter. This is normally the case in a calendaring process. A coordinate transformation is suggested, namely a= x (14) Dh0 The equation for the pressure gradient (equation (11)) yields ( ) 2 2 a 2 − a *2 Dh0 m ⎛ 2n + 1 ⎞ n ⎛⎜ a − a * U⎟ ⎜ ⎜ 2 n +1 h0n +1 ⎝ n ⎠ ⎜ a2 +1 ⎝ n −1 dp = da ( ) ⎞⎟ (15) ⎟ ⎟ ⎠ The pressure built up through the calender nip, which is the difference in pressure between the rolling bank surface and p(x) is given by the integral of equation (15): n −1 p(a) = ( ) ) 2 2 a ' 2 − a *2 Dh0 m ⎛ 2n + 1 ⎞ n a a ' − a * U⎟ ∫ da' ⎜ 2 n +1 h0n +1 ⎝ n ⎠ − aH a' 2 +1 ( (16) 25 in which a* determines the position where the calendered sheet leaves one of the roll surfaces and is determined by the following equation a* p(a*) = 0 = ∫ (a' (a' +1) a' 2 −a *2 −aH n −1 2 −a *2 ) da' 2 n +1 2 (17) The pressure distribution given by equation 16 causes an acting force of both rolls. The magnitude of this force is given by integrating this equation: x* F = p( x)dx W −∫H (18) in other words F mD ⎛ 2n + 1 ⎞ U⎟ = n ⎜ W h0 ⎝ n ⎠ n A* a ∫ ∫ (a' (a' +1) a' 2 −a *2 − AH a * 2 n −1 2 −a *2 2 n +1 ) da' da in which 2h0 represents the clearance D the diameter of the calender roll aH the rolling bank height a * the distance from the clearance behind the calender where p = 0 W the total width of the calender roll F the resulting force on the calender roll (19) 26 n the power law index m the power law coefficient Although equation (19) cannot be solved analytically it is possible to approximate equation (19) by using ∫ f ( x )dx ≈ ( f ( x + ∆x ) + f (x )) ⋅ ∆x 2 (20) The following diagrams show typical pressure curves in the flow region of the calender nip as a function of various parameters. The following parameters are used for the presented model calculations: U = 0.15 m/s ; h0 = 0.25 mm ; m = 100 kPas ; n = 0.2 ; H = 0.1 m Fig 34 shows a slight dependency of the pressure built up on the calender line speed, which equals the circumferential roll speed. The general shape of the pressure curve can be understood as follows. A converging drag flow yields a pressure built up until a barrier has been passed. The material left (=upstream) from the pressure maximum will take part in the rolling bank flow. The material between the pressure maximum and the clearance of the calender flows by means of the drag flow and pressure flow. Each material volume element will pass the clearance. At the position where the pressure vanishes the sheet will be taken apart from one of the rolls. Fig. 35 through 37 show the dependency of the pressure built up on the rolling bank content. The pressure curve and therefore the nip force will change dramatically with the rubber content in the nip region. A varying feeding of the calender will cause varying nip-forces. Fig. 38 shows the influence of the clearance setting. A smaller clearance will cause a higher pressure built up and therefore higher nip-forces. 27 Fig. 39 and 40 show a tremendous dependency on both power law parameters. The pressure built up and nip-force very much depend on the viscous behaviour of the rubber compound. Although not calculated one can simply understand that a varying feed stock temperature will cause variations in the nip-force because the viscosity of rubber compounds very much depends on temperature. Roll deflection compensating methods From the diagrams in fig 34 until 40 it might become clear that all parameters will have a tremendous influence on the calendering process and therefore on the calendered product. The calender line speed seems to have the least influence on the calendering performance. Although viscous heating has been neglected in the modelling of the clearance flow it can be easily understood that a varying compound temperature (and therefore varying viscosity) will cause a tremendous variation of the product quality. Model predictions have shown a dramatic dependency on viscosity data. High pressures can be found in the calender nip region. The resulting force acts on the adjacent calender rolls and causes a deflection of the rolls and therefore a thickness gradient across the calendered product. The total displacement Y(z) of the roll surface caused by roll deflection due to this viscous force can be approximated by Kopsch77 Y ( z) = FW 2 z ⎡ z 2 z 3 b 6bz ⎤ ⎢1 − 2⎛⎜ ⎞⎟ + ⎛⎜ ⎞⎟ + 6 − ⎥ ⎝W⎠ ⎝W⎠ 24 EJ ⎢ W W2 ⎥ ⎣ ⎦ in which (21) 28 E represents the elasticity modulus of the material of which the rolls are made (said 210 GPa) J the moment of inertia of the roll b the distance between roll edge and bearing edge z the co-ordinate parallel to the roll axis with respect to the roll edge J is given by J= D 4 − D 4) ( i 64 0 π (22) in which D0 is the outer diameter and Di is the inner diameter of the calender roll. The enlargement of the clearance caused by roll deflection can be compensated completely by applying an external bending force on the outer ends of the roll axis. If the acting force causes a roll deflection which exceeds a certain lateral displacement of the roll the thickness gradient across the calendered product might be beyond the required value which means that a calender shall include some special devices to compensate this roll deflection. Some well known devices are: 1. Cross axes setting 2. Counter roll bending 3. Roll crowning. By crossing the axes of both rolls in the surface of the calendered sheet the effect of roll deflection can be compensated partially. If C0 represents the cross axes setting displacement the resulting clearance YCA(z) is given by ( ) 2 ⎛ ⎞⎛ 2 z ⎞ Y ( z ) = ⎜ C 2 + D + 2h 2 − D − 2h ⎟⎜1 − ⎟ CA 0 0 ⎠⎝ W ⎠ ⎝ 0 (23) 29 in which the Pythagoras theorem has been applied. Fig 41. shows the effect of the cross axes setting on the clearance along the calender roll. The effect of the deflection of both rolls on the clearance is given for the reference situation as given before. The total width W of the roll is 1600 mm and the diameter D is 650 mm (inner diameter Di = 350 mm). Z is the coordinate parallel to the rolls and originates at one of the calender roll edges. It seems that the right setting of the cross axes setting practically can compensate the deflection of the rolls due to the nip-forces. A compensation of roll deflection can also be achieved by means of outer roll bending devices, which is depicted in fig 42. An additional counter directed bending force is applied on the outer ends of the rolls. In modern calender lines both compensating devices can be found. It is common that wide calender rolls are crowned in such a way that under working conditions the crowning compensates the roll deflection due to high shear forces. Crowning specifications can be understood by means of the presented theory. Since the lowest nip-forces can be achieved at high clearance settings, low line speeds, with a small rolling bank and by using a low viscous rubber compound roll crowning should be specified for these cases. Outer roll bending and cross axes setting devices will compensate the effect of additional nip-forces. A calender line for coating of textile and steel cords There are various text books available on the calendering process,78 79 to which is referred for an extensive explanation. In this section the impact of the presented theory on the general lay out of a dual purpose calendering line for textile cord and steel cord coating is considered. Obviously the nip forces do influence the calendering process and determine the product quality. From the theory as presented previously in this paper it can be easily seen that a constant product 30 quality yields a constant calendering process. Constant with respect to line speed, viscosity and therefore preheating history and rolling bank geometry i.e. nip feeding. The following specifications for the process of steel and textile cord coating can be understood by the model in a qualitative way: 1. Constant and steady nip feeding 2. Constant rubber temperature with which the calender is fed 3. Cord tension as low as possible, but sufficient to keep cord distribution 4. Adjustable in at least 3 steps 5. Cord density control 6. Calender to be equipped with crowned rolls, external roll bending and adjustable cross axes setting (controlled) 7. Thickness control equipment 8. Peaks in tension to be damped 9. Batch to batch variations to be avoided 10. Major changes in calender line speed to be avoided Fig 43 shows a general lay out of a dual purpose calender line for coating steel cord and textile cord. The heart of the production line is the 4 roll calender in a S-configuration. 2 rubber sheets are formed in the upper and lower nip. The thin sheets are guided to the middle nip and the cords are coated in the middle nip between the two rubber sheets. Generally outer roll bending is applied on roll 2 and 3 to compensate the roll deflection caused by the nip-force in nip 2. Rolls 1 and 4 can be set crossed respectively to roll 2 and 3. The accumulator in the upstream is designed in such a way that the calendering process can run steadily while splicing the tail end of a fabric with the lead end of the fabric of the next roll. The accumulator in the down stream takes care for a constant process during the exchange procedure at the winding station. Beside roll deflection and therefore thickness gradients in the product high pressure in the calender nip may cause varying positions of the cords in the calendered sheet in case of cord coating. 31 By applying a sufficient high cord tension this can be avoided. However cord tension might cause some elongation. The duration of application of high cord tension has to be as short as possible in order to avoid creep. The complete upstream and downstream of the calender is mainly dedicated to maintain the pre-set cord tension. In order to keep the cord tension as low as possible the tension can be set in 3 - 5 steps. 1 (or 2) in the textile upstream, 1 in the calender area and 1 (or 2) in the calender downstream. In order to keep the tension of each steel cord constant (steel cord is supplied on separate bobbins, which are put on shafts in the creel room) each unwinding position for steel cord bobbins is equipped with a controlled braking system. Only in the calender area the cord tension is high enough to resist the pressure caused by the rubber flow in the calender nip region. Therefore a constant cord density can be maintained by means of locally high cord tension. Fig 44 typically shows the capability of a modern calender line to produce a 1450 mm coated sheet without a big thickness gradient across by applying the proper cross axes settings for various products. The products fulfil the requirement mentioned earlier in this paper. 32 Masterbatch mixing Remilling Final Batch mixing Rotor speed (rpm) 60 60 30 Charging Polymer Masterbatch Remilled batch Mastication 30 s - - Charging Fillers + small - Small components components Mixing 15 s 50 s 50 s Injection of process oil - - Oil incorporation 30 s - - Ram sweep 15 s 15 s 15 s After mixing until 155°C until 155°C until 105°C Table 1. Mixing procedures on Kobe Steel’s BB270 mixer with 4WH mark ii rotors 33 Masterbatch Incorporation Remilling Final Mix After mixing Avg. power kW 900 700 750 580 Temp. increase °C/s 2,15 0,9 1,03 0,7 Enthalpy increase kW 844 353 403 267 Id. in % of avg. power % 94 50 54 46 Table 2. Results of the analysis of fingerprints of fig. 16 34 Table 3 Results of a fingerprint analysis of a masterbatch and Remill mixing process of a SBR CB compound on a GK 320 E intermeshing mixer with PES3 rotors (Harburg Freudenberger) Masterbatch Incorporation Remilling After mixing Avg. power kW 980 520 650 Temp. increase °C/s 1,7 0,24 0,26 Enthalpy increase kW 673 99 103 id. in % of avg. power % 69 19 16 35 Benefits Disadvantages Accepts almost any trade form High power peaks Proven technology Batch to batch variation No need for special dosing equipment heat history Both automatic and manual control material weight variation Efficient dispersion effect Dust forming by air movement Flexibility in run length Labour intensive “easy” to maintain and robust machine Many adjustable parameters Wide application field High installation costs Complicated downstream Table 4 Benefits of Internal Mixers 36 Benefits Disadvantages Steady power supply, i.e. steady process and Free flowing raw materials only constant heat history Developing technology fine-tuning possible complicated dosing machines necessary Labour extensive Automatic control only Constant high degree of mixing, no between beneficial for long runs only batch var. High mass temperatures (to some extend) lower erection costs Screw optimisation for one compound Higher degree of dispersion because of lack of dead spots Direct Extrusion possible Direct calendering possible Table 5. Benefits of continuous mixing devices 37 Fig 1. Basic concept of an internal mixer 2000 200 1500 150 1000 100 500 50 0 0 50 100 150 200 time (s) Power Ram position Avg Power Temperature Fig 2 Typical fingerprint for masterbatch mixing 0 250 Temperature (C) Power supply (kW) 38 39 Fig 3: Rheocurves of various batches of a compound with the same recipe 40 Fig 4. The concept of the internal mixer as suggested by Banbury (1917) 41 Fig 5. Typical general lay out of a mixing room 42 Fig 6 Schematic representation of flows in a mixing chamber of an internal mixer 43 Fig 7 Masterbatch mixing procedure (straight mixing) 1 2 3 4 5 7 6 8 Discharge Polymer Filler incorporation charging After Mastication mixing Filler Ram sweep charging Oil injection 44 Fig 8. Typical fingerprint of a straight masterbatch mixing process 2 3 4 5 6 7 8 2000 200 1500 150 1000 100 500 50 0 0 0 50 100 150 200 time (s) Power Ram position Avg Power Temperature 250 Temperature (C) Power supply (kW) 1 Power (kW) resp. Ram position (mm) 45 1200 120 1000 100 800 80 600 60 400 40 200 20 0 0 20 40 60 80 100 120 140 0 160 time (s) Power Ram position Temperature © Fig. 9, Typical fingerprint of a final batch mixing process (data obtained from a GK160SUK with fixed rotor speed (18/25 rpm) 46 1600 Power (kW) resp. Ram position (mm) 1400 1200 1000 800 600 400 200 0 70 90 110 130 Time (s) Power Ram position Fig 10. Illustration of the effect in the fingerprint of material jam in the interclearance zone. 47 7% 5% 31% 9% 24% 24% Compound Enthalpy (MJ) Gear box losses Cooling through mixing chamber (MJ) Losses to ambient Cooling through rotors, side plates and drop door Mixer Enthalpy Fig 11. Typical energy balance of 1 batch mixing process on a GK320 E mixer (SBR/CB compound) 1600 160 1400 140 1200 120 1000 100 800 80 600 60 400 40 200 20 0 0 50 100 150 200 250 Temperature (C) resp. rotor speed (rpm) Power (kW) resp. Ram position (mm) 48 0 300 Time (s) Power Ram position Temperature Rotor speed Fig 12. Typical fingerprint of a masterbatch mixing process on an intermeshing internal mixer (GK 320E (Harburg Freudenberger) with PES 5 rotors; SBR / CB tread compound) 1600 160 1400 140 1200 120 1000 100 800 80 600 60 400 40 200 20 0 0 50 100 150 200 250 300 350 400 450 0 500 Time (s) Power Ram position Temperature Rotor speed Fig 13. Typical fingerprint of a masterbatch mixing process of a S-SBR / Silica / TESPT tread compound on a GK 320E (Harburg Freudenberger) with PES 5 rotors. Temperature (C) resp. Rotor speed (rpm) Power (kW) resp. Ram position (mm) 49 50 Fig 14. Two roll mills with stock blender 51 Fig 15. Influence of the open mill mixing process on the degree of silanisation in a S-SBR / Silica / TESPT compound as given in a contour plot of the Payne effect (G’(0,56)) according to Zuuring29. With proceeding silanisation the Payne effect drops tremendously. 52 Fig 16. Fingerprint of a masterbatch (top), remill (left) and final batch (right) mixing process of a NR-SBR-BR / CB compound, mixed on a Kobe Steel BB270 tangential mixer with 4WH mark ii rotors. The temperature increase and average power during dispersion (only masterbatch) and after mixing phase are indicated in the diagram. 53 Fig. 18. Power charts made on a GK 45E (PES3 rotors; Harburg Freudenberger) as a part of a design of experiments reported by Schlag32 54 Fig 19. Example of a 2 wing (tangential) rotor (2WS Rotor of Kobe Steel Ltd) 55 Fig 20. HDM Rotor design (tangential) of Pomini 56 Fig 21. MDSC and HDSC rotor designs of Harburg Freudenberger compared to their full 4 wing rotor Full-4-Wing HD-SC MD-SC 57 Fig 22. ST Rotor design by Farrel 58 Fig 23. 4WH Rotor design of Kobe Steel 59 Fig 24. 6WI rotor design of Kobe Steel 60 Fig 25: Tandem Mixing concept by Peter45. 61 Fig 26: Typical screw configurations for co-rotating twin screw extruders 62 Fig 27. Typical screw elements as applied in co-rotating twin screw extruders 63 Fig 28: Typical pressure built up along a screw axis of a co-rotating TSE 64 Fig 29: Farrel Continuous Mixer 65 Fig 30: The Bühler Ring extruder 66 Fig 31. The Planetary Gear Extruder (supplied by Battenfeld and Entex) 67 Fig 32: The Farrel MVX extruder 68 Fig 33. Illustration of the Calender Nip Flow 69 Pressure between 2 calender-rolls Calender Line Speed 20 Millions Pressure (Pa) 15 10 5 0 -0.20 -0.15 -0.10 -0 .0 5 -0 .0 0 0.05 Distance f rom calender clearance 0.15 m/s 0.135 m/s 0.075 m/s 0.165 m/s 0.3 m/s Fig 34. Pressure between 2 calender rolls: variation of the calender line speed 70 Pressure in a calender clearance Rolling Bank height = 10 cm 20 Millions Pressure (Pa) 15 10 5 0 -0.20 -0.15 -0.10 -0.05 -0.00 0.05 Distance from Clearance (m) Fig. 35: Pressure built up in the nip between 2 calender rolls. Rolling Bank Height = 10 cm 71 Pressure in a calender clearance Rolling Bank Height = 20 cm 20 Millions Pressure (Pa) 15 10 5 0 -0.20 -0.15 -0.10 -0.05 -0.00 0.05 Distance f rom Clearance (m) Fig. 36: Pressure built up in the nip between 2 calender rolls. Rolling Bank Height = 20 cm 72 Pressure in a Calender Clearance Rolling Bank Height = 5 cm 20 Millions Pressure (Pa) 15 10 5 0 -0.20 -0.15 -0.10 -0.05 -0.00 0.05 Distance from Clearance (m) Fig 37: Pressure built up in the nip region between 2 calender rolls: Rolling Bank Height = 5 cm 73 Pressure in a Calender Clearance Variation of Clearance 40 Millions Pressure (Pa) 30 20 10 0 -0.20 -0.15 -0.10 -0.05 -0.00 0.05 Distance from Clearance (m) 0.25 mm 0.5 mm 1 mm Fig. 38: Pressure built up in the nip region of 2 calender rolls as a function of the clearance setting 74 Pressure in a calender clearance Variation of pow er-law coefficient 40 Millions Pressure (Pa) 30 20 10 0 -0.20 -0.15 -0.10 -0.05 -0.00 0.05 Distance from Clearance (m) m = 100 kPas 50 kPas 200 kPas Fig. 39: Pressure built up in the nip region between 2 calender rolls as a function of the power law coefficient 75 Pressure in a Calender Clearance Variation of the pow er-law index 40 Millions Pressure (Pa) 30 20 10 0 -0.20 -0.15 -0.10 -0.05 -0.00 0.05 Distance from Calender Clearance n=0.1 n=0.2 n=0.3 Fig. 40: Pressure built up in the nip region between 2 calender rolls as a function of the power law index. 76 Influence of cross axis on the roll bending 0,58 Roll bending (mm) 0,56 Cross axis = 0 mm 0,54 2.5 mm 5 mm 7.5 mm 0,52 9 mm 0,5 0,48 0 500 1000 1500 2000 Distance from roll edge (mm) Clearance 0.5 mm ; Rollwidth 1600 mm fig. 41: Effect of the cross axes setting compensation method on the clearance in the total width of the calender roll in working condition 77 Fig. 42: Illustration of the outer roll bending working principle 78 Fig. 43: Example of a general lay out of a dual purpose calender line for coating textile and steel cord. Legend 1. Textile cord let off 2. splice press 3. tension control unit 4. accumulator 5. pull unit 6. tension control unit 19. wind up station 7. preheating drums 8. creel room 9. guiding roll for steel cord 10. splice press 11. 4 rolls S-calender 12. tension control unit 13. cooing drums 14. cross yarn breaker 15. tension control unit 16. accumulator 17. pull unit 18. guiding roll 79 Thickness of calendered cord 1.48 1.46 Thickness (mm) 1.44 1.42 1.40 1.38 1.36 1.34 1.32 1.30 0 200 400 600 800 1000 1200 1400 width across calender direction (mm) Fig. 44: Typical thickness deviation across the calender direction for various products (textile cord sheet) 80 Literature 1 M.M. Melotto; Rubberworld 217, 17 (1995) 2 J.L. Leblanc, C. Evo, R. Lionnet; Kautschuk Gummi Kunst. 47, 401 (1994) 3 F.H Banbury; US Patent 1,227,522, (1917) 4 A. Limper, P. Barth and F. Grajewski: Technologie der Kautschukverarbeitung; Carl Hanser Verlag, München (1989) 5 (ed) Anil K. Bhowmick, Malcolm M. Hall, Henry A. Benarey: Rubber Products Manufacturing Technology; Marcel Dekker, Inc; New York, Basel, Hong Kong; 1994; ISBN 0-8247-9112-6 6 James L. White: Rubber Processing Technology, Materials and Principals; Hanser Publishers, Munich, Vienna, New York; 1995; ISBN 3-446-16600-9 7 Fritz Röthemeyer / Franz Sommer: Kautschuktechnologie; Hanser, München, Wien; 2001; ISBN 3-44616169-4 8 W.M. Wiedmann, H.M. Schmidt; Kautschuk Gummi Kunst. 34, 479 (1981) 9 J.L. White, J.K. Min: International Seminar on Elastomers, J.Appl.Polym.Sci: Appl. Polym. Symp. 44, 59 (1989) 10 Nijman: Anforderungen an einem Mischsaal aus Sicht eines Reifenfertigers. DIK Symposium on Mixing, Hannover, (1993) 11 S. Ghafouri; Rubberworld, 222, 31 (2000) 12 S. Schaal, A.Y. Coran, S.K. Mowdood; Rubber Chem. Tech. 73, 240 (2000) 13 G. Nijman, R.Luscalu; Rubberworld 221, 27 (1999) 14 J.L. Leblanc, R. Lionnet; Polymer Eng. Sci. 32, 989 (1992) 15 K. Min, J.L. White; Rubber Chem. Tech. 58, 1024 (1985) 16 A. Morikawa, J.L. White, K. Min; Kautschuk Gummi Kunst. 41, 1226 (1988) 17 A. Morikawa, K. Min, J.L. White; Adv. Polym. Technol. 8, 383 (1988) 18 P.S. Kim, J.L. White; Rubber Chem. Tech. 69, 686 (1996) 19 R. Regalia, S. Sibilla; Gummi Fasern Kunst. 52, 264 (1999) 81 20 B. Hu, J.L. White; Rubber Chem. Tech. 66, 257 (1993) 21 J. Clarke, B. Clarke, P.K. Freakley; Rubber Chem. Tech. 74, 1 (2001) 22 C-H. Yao, I. Manas-Zloczower, R. Regalia, L. Pomini; Rubber Chem. Tech. 71, 690 (1998) 23 J.K. Kim, J.L. White; Nihon Reoroji Gakkaishi 17, 203 (1989) 24 U.Büker; Diploma Thesis RWTH Aachen University, Aachen (D) (2000) 25 L.A.E.M. Reuvekamp, J.W. ten Brinke, P.J. van Swaaij, J.W.M. Noordermeer; Rubber Chem. Tech. 75, 187(2002) 26 L.A.E.M. Reuvekamp, J.W. ten Brinke, P.J. van Swaaij, J.W.M. Noordermeer; Kautschuk Gummi Kunst. 55, 41 (2002) 27 M.P. Wagner Rubber Chem. Tech. 49, 703 (1976) 28 Degussa, Organosilanes for the rubber industry, technical inf. (1995) 29 A. Zuuring; Diploma Thesis Saxion University, Enschede (NL) (2000) 30 W.M. Wiedmann, H.M. Schmidt; Rubber Chem. Tech. 55, 363 (1982) 31 N. Nakajima, E.R. Harrell, D.A. Seil, Rubber Chem. Tech. 55, 456 (1982) 32 L. Schlag; Dimploma Thesis University OOW, Emden (D) (1999) 33 G.S. Donoian, E.L. Canedo; L.N. Valsamis; Rubber Chem. Tech. 65, 792 (19xx) 34 N. Yamada, K. Takakura, K. Inoue; Paper presented at a meeting of the ACS Rubber Division in Dallas, (2000) 35 M.A. Melotto; Paper presented at a meeting of the ACS Rubber Division xxxx 36 F.J. Borzenski; Paper 27C of the ITEC 1998 37 L. Pomini; Paper presented at a meeting of the ACS Rubber Division in Cleveland (1997) 38 R.J. Jorkasky; Paper 32B of the ITEC 2006 39 Kobe Steel, Ltd. Introduction of new 4 wing rotor (4WN Rotor); technical inf. 40 www.harburg-freudenberger.com company brochure 41 L. Pomini, M. Jacobi; Kautschuk Gummi Kunst. 54, 684 (2001) 42 E. Sheehan, L. Pomini; Rubberworld 219, 21 (1997) 43 L. Pomini, Kautschuk Gummi Kunst. 47, 865 (1994) 82 44 C-H. Yao, I. Manas-Zloczower, R. Regalia, L. Pomini; Rubber Chem. Tech. 71, 690 (19xx) 45 J. Peter, G. Weckerle Kautschuk Gummi Kunst. 43, 606 (1990) 46 J. Peter, G. Weckerle; Kautschuk Gummi Kunst. 43, 896 (1990) 47 J. Peter, G. Weckerle, F. Johnson, F. Thurn; Kautschuk Gummi Kunst. 44, 758 (1991) 48 J. Peter, G. Weckerle; Kautschuk Gummi Kunst. 46, 545 (1993) 49 J. Peter, F. Röthemeyer, J. Jennissen; Kautschuk Gummi Kunst. 47, 666 (1994) 50 F. Johnson; Rubberworld 213, 31 (1993) 51 G. Nijman; Kautschuk Gummi Kunst. 57, 430 (2004) 52 H. Keuter, A. Limper; Kautschuk Gummi Kunst. 56, 250 (2003) 53 H. Keuter, A. Limper; Kautschuk Gummi Kunst. 58, 90 (2005) 54 H. Keuter, A. Limper; Kautschuk Gummi Kunst. 58, 581 (2005) 55 H. Keuter, A. Limper, C. Rüter ; Gummi Fasern Kunstst. 57, 715 (2004) 56 H. Keuter, A. Limper, A. Holzmüller, V. Hasemann; Gummi Fasern Kunstst. 57, 791 (2004) 57 H. Keuter, A. Limper, U. Magnusson; Gummi Fasern Kunstst. 58, 27 (2005) 58 U. Görl, K.H. Nordsiek, Kautsch. Gummi Kunstst. Vol 51; page 250 (1998) 59 E.T. Italiaander, Rubber Technology International, Vol 26 page 177 (1997) 60 Görl U., Schmitt M., Amash A., Bogun M. Kautsch. Gummi Kunstst. Vol 55, page 22 (2002) 61 Pirelli World, 32, no 3; page 4 (2002) 62 P.K. Freakley, J.B. Fletcher; Kautschuk Gummi Kunst. 55, 535 (2002) 63 G. Capelle, Gummi Fasern Kunstst. 49, page 470 (1996) 64 R. Uphus, O. Skibba, R.H. Schuster, U. Görl; Kautschuk Gummi Kunst. 53, 279 (2000) 65 A. Amash, M. Bogun, R.H. Schuster, U Görl; Kautschuk Gummi Kunst. 55, 367 (2002) 66 M. Bogun, F. Abraham, L. Muresan, R.H. Schuster, H.J. Radush; Kautschuk Gummi Kunst. 57, 363 (2004) 67 A. Limper, H. Keuter, Paper presented on a symposium on Mixing at the DIK German Rubber Institute; September 11, 2000 in Hannover, Germany. 68 F.J. Borzenski; Paper presented on a symposium on Continuous Mixing at the DIK German Rubber Institute; October 25 and 26, 1999 in Hannover, Germany. 83 69 F. Innerebner; Paper presented on a symposium on Continuous Mixing at the DIK German Rubber Institute; October 25 and 26, 1999 in Hannover, Germany. 70 M. Roth; Paper presented on a symposium on Continuous Mixing at the DIK German Rubber Institute; October 25 and 26, 1999 in Hannover, Germany. 71 S. Luther, M. Bogun, H. Rust; Kautschuk Gummi Kunst. 58, 371 (2005) 72 F.J. Borzenski; Paper presented on a symposium on Continuous Mixing at the DIK German Rubber Institute; October 25 and 26, 1999 in Hannover, Germany. 73 ERJ 184, no 7; page 30 (2002) 74 Ardichvilli, G.: Kautschuk 14, 23 (1938) 75 Gaskel, R.E.: J. Appl. Mechanics 17, 334 (1950) 76 McKelvey, J.M.: Polymer Processing. J. Wiley and Sons Inc., New York, 1962, page 211 77 Kopsch, H.: Kalandertechnik. Carl Hanser Verlag, München, Wien, 1978, page 23 78 Kopsch, H.: Kalandertechnik. Carl Hanser Verlag, München, Wien, 1978 79 Capelle, G: Calendering Technology, in (ed) Bhowmick, Hall and Benarey: Rubber Products Manufacturing Technology, Marcel Dekker Inc.; New York, Basel, Hong Kong; 1994