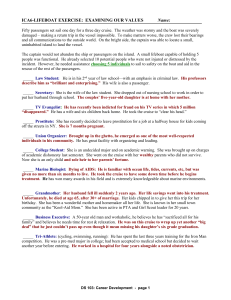
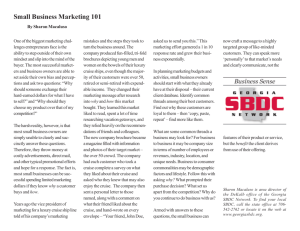
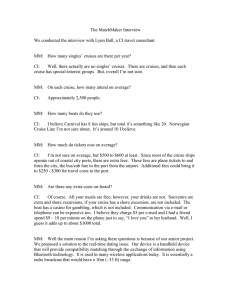
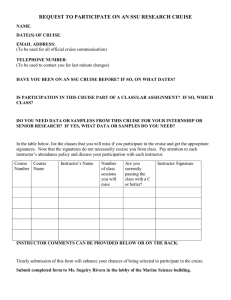
Control system (Automatic cruise control system) Control system: Control system is a system which gives us desired outputs on any condition. In order to control the proposed system, we are taking car as a reference which is shown in figure I. The free body diagram of the car is illustrated in such a way, there are three forces acting on the mass of the car. (i) (ii) The applied force which is denoted by “ u ” The friction force which is denoted by “ Fb ” (iii) The force of the mass itself (mass of car), denoted by “ Fm ” In order to control this system, we have to generate equations for these forces acting the car which we have taken as a reference. We know that, from Newton 2nd law of motion F=ma Therefore, we know that acceleration is the derivative of velocity, as well as the double derivative of displacement is shown in the equation shown below the car. In this case, the force acting by the mass of car will be equal to: Fm m v or Fm m x Similarly, the force acting by friction of the tires of car as consider as damper force, and can be written as: Fb bV Or Fb b x The third force acting on this system as the applied force which is denoted by u. The applied force will be equal to the sum of the force of mass and friction force and can be written as: u mv bv Fig 1 The next step is to choose system parameters like, the value of mass and damper. For the proposed model, we have considered the parameters as follows: Mass m = 900 kg; Damper coefficients b = 40 N.s / m; The transfer function of the proposed system is model as follows: G (s) 1 ms b After completing this portion, we are now able to design a MATLAB (SIMULINK) control system model, as well as the cruise control system model. MATLAB (SIMULINK) model Steps (i) (ii) (iii) (iv) Open MATLAB and the open Simulink Click on blank model The next step is to open SIMULINK library We drag integrator from the library and paste in the blank model The integrator is needed to solve the integral of an acceleration which comes into account due the force of mass itself from Newton 2 nd law of motion. (v) After that, we drag the gain from library to solve the mass of the control system and connect the gain with integrator. The gain is equal to 1/m, after putting m = 900 kg, the proposed gain will be equal to 1 / 900. After completing this step, we have considered different forces acting on the system which we discussed in the above discussion. (vi) For this step, we have to drag sum from the library and connect it with gain. Therefore, we drag sum from the library and connect it with gain. (vii) After this, we add feedback to the system by inverting the gain block and connect it with sum as a negative feedback. (viii) This feedback is actually the damper action on the proposed system which we considered as a friction in the above discussion. (ix) The applied force on the proposed system mass is denoted by u, which we discussed in the above discussion. For this force, we add scope from the source library and connect it with summer. (x) We have seen the system response by adding scope, connected to output. In order to simulate this control system model: (a) Click on the green run button and wait a while (b) After the compilation, click on scope, the proposed result will be showed The SIMULINK model and the response of the model is obtained by following the above steps is shown as follows. Cruise control flow chart Schematic diagram of cruise control SIMULINK MODEL The SIMULINK model of the control system as follows: The system control response as follows: The parameters specifications are listed below: The gain of the system m = 900 kg Integrator Feedback b = 40 N.s / m The control system discretion is completed. The previous session was all about the control system, now, we are going to work on cruise control of the system and is named as “Cruise control system design”. Cruise control system Cruise control system: Cruise control is a control system which is normally used in vehicles like car, cruise control system controls the cars speed, automatically. In order to apply cruise control to the system, first, we save the control system which we discussed in the control system portion. Steps (i) The only change in the existing model will be needed. By changing the step to port 1 and scope to port 2 as shown In this model, we only replaced step by port “1” and scope by port “2”. The aim is to save this model for cruise control. (ii) (iii) (iv) (v) (viii) (ix) We created a new window for the cruise control Open Library Drag “subsystem”, which is a proposed car which we have taken as a reference By clicking on the (subsystem block), we saved our previous model which we designed for the control system. Specifically, we saved the bock having port 1 and port 2 is shown in the above figure, we named the subsystem as plant model. After this, we dragged sum to the new window We draw a line from the output of the plant model and connect it with the negative of the sum as shown in the model. We drag integrator, and connect it with the sum as shown in the model After that, we drag two gains, one is k p and the other is ki (x) We assign values k p 800 and ki 40 (vi) (vii) (xi) For the cruise control, we considered PI controller having the gains k p 800 and ki 40 . (xii) After that, we drag another sum block, which connect k p and ki as shown in the model (xiii) After this, we connected the output of the block (sum) to the input of the block (plant model) as shown in the model After this, we insert the step from library and connect it with the first block (sum) as an input Finally, we drag scope from the library and connect it with output. (xiv) (xv) By following these steps, we created a cruise control system which is shown in the MATLAB (SIMULINK) section and is given as follows: MATLAB (SIMULINK) model of Cruise control system By clicking on plant model, we get By simulating the above model, we get the cruise control system response as follows: k p = 800 ki = 40 Tinkercad model of Automatic cruise control system Following is the tinkercad model of automatic cruise control system. In order to simulate cruise control system in Tinkercad The components used in the proposed cruise control system model as follows: (i) (ii) (iii) (iv) (v) (vi) (vii) (viii) (ix) (x) (xi) Arduino UNO R3 LCD ( 16 3 ) The potentiometer ( 250k ) Oscilloscope ( 100ms ) DC motor Ultrasonic distance sensor Micro servo 1k Resistor 220 Resistor Slide switch Green LED The following components are connected in manner shown in the above Tinkercad circuit. Cruise control system design (Tinkercad) Cruise control system: Cruise control is a control system which is normally used in vehicles like car, cruise control system controls the cars speed automatically. The proposed tinkercad circuit indicates an automatic cruise control in car, which is an advance driver assistance system. The cruise control system model is designed which consist of an ultrasonic sensor for detecting distance from vehicle ahead from the proposed car. We assume that, the proposed system should be implemented on an electronic car, therefore, the motor used in the proposed model represents the car speed of the motor used inside cars. The proposed model consists of three push buttons: (a) Reset button (b) Automatic cruise control button (c) Confirm (left to right) button Furthermore, the proposed system has 3 pots which is shown in the above model: (a) Distance set (b) Speed set (c) Actual vehicle speed Moreover, the proposed model consists of 2 RGB LEDs, the order assumed if from left towards right as shown in the model, the LEDs are: (a) Distance indicator 1 (b) Distance indicator 2 The color of the LEDs is divided as: Red, Green, Yellow In case of distance indicator 1, red indicates that the ahead vehicle is very close, yellow indicates that the distance from the ahead vehicle is medium which we assume, however, green LEDs shows that the vehicle going ahead is far enough. In case of distance indicator 2, red represents that the proposed vehicle is in high speed, yellow indicates medium speed and green indicates low speed of vehicle. Benefits of cruise control system Benefits of the cruise control system is to give assistant to car driver as well as to avoid accidents. Conclusion A cruise control system model is proposed to control the car in all prospective. By implementing such a model, we can give assistant to car drivers to know about the going ahead car distance, which includes, close distance, medium distance as well as far away distance. Moreover, it shows car current speed to drivers, and let them know that your car speed is maximum, average or low. THE END