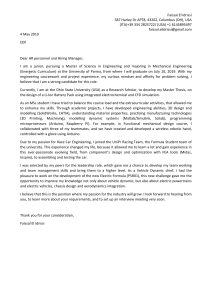
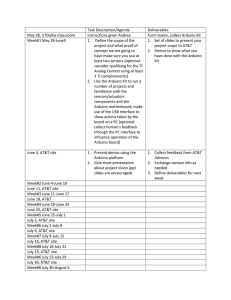
Available online at www.sciencedirect.com ScienceDirect IFAC PapersOnLine 52-27 (2019) 217–221 Arduino Arduino Support Support for for Personalized Personalized Learning Learning Arduino of Support for Personalized Learning Control Theory Basics Arduino of Support for Personalized Learning Control Theory Basics of Control Theory Basics of Control Theory Basics Pavol Bisták ∗∗∗ Pavol Bisták ∗∗ Pavol Bisták ∗ ∗ Pavol BistákUniversity of Automotive Mechatronics, of ∗ ∗ Institute Institute of Automotive of Technology Technology in in Mechatronics, University ∗ ∗ Institute of Automotive Mechatronics, University of Technology in Bratislava, Slovakia (e-mail: pavol.bistak@stuba.sk). Bratislava, Slovakia (e-mail: pavol.bistak@stuba.sk). ∗ Institute of Automotive Mechatronics, University of Technology in Bratislava, Slovakia (e-mail: pavol.bistak@stuba.sk). Bratislava, Slovakia (e-mail: pavol.bistak@stuba.sk). Abstract: Abstract: This This paper paper discusses discusses a a possibility possibility how how to to make make learning learning of of control control theory theory basics basics more more interesting for anpaper individual learner. Specifically, anmake approach of of learning by doingbasics is applied Abstract: This discusses a possibility how to learning control theory more interesting for an individual learner. Specifically, an approach of learning by doing is applied Abstract: This discusses a architecture possibility how learning of control theory more when usingfor a low-cost Arduino for toeach student. As an example ofbasics dynamical interesting anpaper individual learner. Specifically, anmake approach ofAs learning by doing is applied when using a Arduino architecture for each student. an of dynamical interesting for an individual learner. Specifically, an advantage approach learning by doing is applied when using a low-cost low-cost Arduino each student.of an example example of support dynamical systems simple RLC-circuits havearchitecture been chosen.forThe ofAs Matlab/Simulink of systems simple RLC-circuits havearchitecture been chosen.forThe advantage Matlab/Simulink support of when using a low-cost Arduino each student.of As an example of dynamical Arduino platform has enabled students to perform programming tasks from known environment. systems simple RLC-circuits have been chosen. The advantage of Matlab/Simulink support of Arduino simple platform has enabledhave students to perform programming tasks from known environment. systems RLC-circuits been advantage Matlab/Simulink support of This paper concentrates on a limited part of the The control theory, of namely the static environment. and dynamic Arduino platform has enabled students tochosen. perform programming tasks from This paper concentrates on a limited part of the control theory, namely theknown static environment. and dynamic Arduino platform has enabled students to perform programming tasks from known characteristics. Particularly, in this part paperof we will present how to construct different RLC This paper concentrates on a in limited the will control theory, namely the staticdifferent and dynamic characteristics. Particularly, this paper present how to construct RLC This paper concentrates oncharacteristics: a in limited of we the will control theory, namely the staticdifferent andfrequency dynamic characteristics. Particularly, this part paperstatic we present how to construct RLC circuits, measure following I/O characteristic, step, impulse and circuits, measure following characteristics: static I/O characteristic, step, impulse and frequency characteristics. Particularly, in this paper we will present how to construct different RLC responses and their parameters. circuits, following responsesmeasure and identify identify theircharacteristics: parameters. static I/O characteristic, step, impulse and frequency circuits, following responsesmeasure and identify theircharacteristics: parameters. static I/O characteristic, step, impulse and frequency © 2019, IFAC (International Federation of Automatic Control) Hosting by Elsevier Ltd. All rights reserved. responses and identify their parameters. Keywords: control theory, learning by doing, doing, RLC RLC circuits, circuits, static static and and dynamical dynamical Keywords: control theory, learning by characteristics, microcontroller Arduino UNO Keywords: control theory, learning by doing, RLC circuits, static and dynamical characteristics, microcontroller Arduino UNO Keywords: control theory, learning by doing, characteristics, microcontroller Arduino UNORLC circuits, static and dynamical characteristics, microcontroller Arduino UNO 1. an 1. INTRODUCTION INTRODUCTION an expensive expensive measurement measurement card card (Huba (Huba and and Huba, Huba, 2015; 2015; an expensive measurement card et (Huba and Takács Huba, et 2015; Huba and Halás, 2011; Malatinec al., 2014; al., 1. INTRODUCTION Huba and Halás, 2011; Malatinec et al., 2014; Takács et al., 1. INTRODUCTION an expensive measurement card (Huba and Huba, 2015; 2019). There exist also microcontroller based open source Control theory belongs to exciting fields of study but many Huba and Halás, 2011; Malatinec et al., 2014; Takács et al., There exist also microcontroller based open source Control theory belongs to exciting fields of study but many 2019). and Halás, 2011; Malatinec al., 2014; Takács etany al., hardware solutions that can be et downloaded free by studentstheory see it like continuation of fields mathematics with a lot Huba 2019). There exist also microcontroller based open source Control belongs to exciting of study but many hardware solutions that can be downloaded free by any students see it like continuation of mathematics with aa lot 2019). There exist also microcontroller based open source Control theory belongs to exciting fields of study but many hardware solutions that can be downloaded free by any institution and used for low-cost production of desired students see it like continuation of mathematics with lot of formulas and derivations. In fact, it is a kind of applied institution and used for low-cost production of desired of formulas derivations. In fact, it is a applied solutions be downloaded free by any students seeand itbut like continuation of mathematics with a lot hardware amount equipment (Takács, of formulas and derivations. In fact, it is students a kind kind of of applied mathematics in order to attract the we have andlaboratory usedthat for can low-cost production of desired amount of of the the (Takács, 2019). 2019). mathematics but in order to attract the students we have institution andlaboratory used for equipment low-cost production of desired of and derivations. In is students athey kindwill of we applied to formulas present the control theory infact, the it way see its institution amount of the laboratory equipment (Takács, 2019). mathematics but in order to attract the have in learning equipment of control theory presented to present thebut control theory in the the waystudents they willwesee its The approach of the laboratory 2019). in mathematics inapplications order to attract have sense in practical from the they very will beginning, The approach in learning of control (Takács, theory presented in to present the control theory infrom the way see its amount this paper is a little bit different. It also relies sense in practical applications the very beginning, The approach in learning of control theory presented in to present the control theory infrom thedevelopment way see an its this paper is a little bit different. It also relies on on technotechnosense in practical applications the they very will beginning, especially when the technological offers The approach in learning of control theory presented in logical development in the field of microcomputers but especially when the technological development offers an this paper is a little bit different. It also relies on technosense in practical applications from the very beginning, development in the field ofItmicrocomputers but it it especially when the technological development offers an logical environment for low-cost solutions. this paper is a little bit different. also relies on technoenvironment for low-cost solutions. offers aadevelopment possibility to student to build his/her own inevery the field of microcomputers but it especially when the technological development offers an logical offers possibility to every student to build his/her own environment for low-cost solutions. logicaladevelopment the field of microcomputers but it offers possibility equipment toinevery student to build own laboratory represented by aahis/her basic elecIt was not always true solutions. several decades ago. This was simple environment for low-cost simple laboratory equipment represented by basic elecIt was not always true several decades ago. This was offers acircuit possibility to every student tothe build his/her own trical and connected through microcontroller It was not always true several decades ago. This was the time when computers were not accessible and the simple laboratory equipment represented by a basic eleccircuit and connected through the by microcontroller thewas time when computers were not accessible and the trical laboratory equipment represented a basic elecIt always true everything several ago. This to his/her laptop. In education this approach is usually students had to calculate by accessible hand. Experiments trical circuit and connected through the microcontroller the timenot when computers were decades not and was the simple to his/her laptop. In education this approach is usually students had to calculate everything by hand. Experiments trical circuit and connected through the microcontroller the time when computers were not accessible and the classified learning by doing. could have been performed with anbyexpensive measure- to his/heras laptop. approach is usually students hadbeen to calculate everything hand. Experiments classified learningIn byeducation doing. this could have performed with an measurehis/heras students hadbeen to calculate everything hand. Experiments classified aslaptop. learningInbyeducation doing. this approach is usually could have performed with anbyexpensive expensive measurement apparatus, usually for big groups of students. Later, to paper on ment apparatus, usually for big groups of students. Later, This classified as concentrates learning by doing. could have of been usually performed with an expensive measurepaper concentrates on aa limited limited part part of of the the control control the computers allowed to ment apparatus, for big groups of students. Later, This the period period of personal personal computers allowed to individualindividualtheory, namely the static and dynamic characteristics. The This paper concentrates on a limited part of the control ment apparatus, usually for big groups of students. Later, namely the static and dynamic characteristics. The ize learning. With the simulation software toreleases (e.g. theory, the period of personal computers allowed individualThis paper concentrates on adynamic limited part of the control theory, namely the static and characteristics. The Arduino Uno has been chosen because of ize learning. With the simulation software toreleases (e.g. microcontroller the period of personal computers allowed individualmicrocontroller Arduino Uno has been chosen because of Matlab, Scilab, Modelica, Octave) software the students could at theory, namely the static and dynamic characteristics. The ize learning. With the simulation releases (e.g. its widespread adoption, Matlab and community support, Matlab, Scilab, Modelica, Octave) the students could at microcontroller Arduino Uno has been chosen because of ize learning. With the simulation software releases (e.g. its widespread adoption, Matlab and community support, Matlab, Scilab, Modelica, Octave) the students could at least verify results calculated by hand. The prices of exmicrocontroller Arduino Uno hasand been chosen because of least verify results calculated by hand. The prices of exand of course, its price. In literature one can find several its widespread adoption, Matlab community support, Matlab, Scilab, Modelica, Octave) the students could at and of course, its price. In literature one can find several periments were decreasing but not enough to be at least verify results calculated bystill hand. The prices of exits widespread adoption, Matlab and community support, periments were decreasing but still not enough to be at and of course, its price. In literature one can find several expamples when the microcontroller Arduino Uno has least verify calculated hand. prices exdisposal for results each student during his/her exercises. The when the microcontroller Arduino Uno has periments butbystill not The enough to of beThe at expamples and ofused course, its price. In literature one can find several expamples when the purposes microcontroller Arduino Uno has been for similar (Suwondo and Sulisworo, disposal forwere eachdecreasing student during his/her exercises. periments were decreasing but still not enough to be at been used for similar purposes (Suwondo and Sulisworo, experimentation part of study has his/her been enabled for work disposal for each student during exercises. The expamples when the purposes microcontroller Arduino Uno has 2017; Weis, 2014; Messner et al., 2017). Particularly, in this experimentation part of study has been enabled for work been used for similar (Suwondo and Sulisworo, disposal for eachpart student during his/her exercises. The 2017; Weis, 2014; Messner et al., 2017). Particularly, in this experimentation of study has been enabled for work in small groups or sharing the equipment for a limited been used for similar purposes (Suwondo and Sulisworo, in small groups or sharing the equipment for a limited paper we will present learning by doing methodology how 2017; Weis, 2014; Messner et al., 2017). Particularly, in this experimentation part of study beenhas enabled for work paper we will present learning by doing methodology how time. The different method in small or progressive sharing thehas equipment for aprovided limited 2017; Weis, 2014; Messner etcircuits al.,by2017). Particularly, in how this time. Thegroups different progressive method has been been provided paper we will present learning doing methodology to construct different RLC and following in groups or progressive sharing themethod equipment for aprovided limited construct RLC circuits and measure measure following by small building remote laboratories when has the been students have to time. The different paper we willdifferent present learning by doing methodology how to construct different RLC circuits and measure following characteristics: static I/O characteristic, step, impulse by building remote laboratories when the students have time. Thethe different progressive has provided static RLC I/O circuits characteristic, step, following impulse accessed real equipment viamethod the Internet (Sáenz ethave al., characteristics: by building remote laboratories when the been students to different and measure andconstruct frequency responses. also discuss advanteges and accessed the real equipment via the Internet (Sáenz et al., characteristics: static I/OWe characteristic, step, impulse by building remote laboratories when the students have accessed the real equipment via the Internet (Sáenz et al., 2015; Kalúz et al., 2015; Bosak and Zakova, 2015). and frequency responses. We also discuss advanteges and characteristics: static I/OWecharacteristic, step, impulse 2015; Kalúz et al., 2015; Bosak and Zakova, 2015). limitations of such an approach from the pedagogical view. and frequency responses. also discuss advanteges and accessed the et real equipment via and the Internet (Sáenz et al., limitations of such an approach from the pedagogical view. 2015; Kalúz al., 2015; Bosak Zakova, 2015). frequency responses. We also discuss advantegesview. and limitations of such an approach from the pedagogical Nowadays the cost2015; of simple laboratory equipment for and 2015; Kalúz et al., Bosak and Zakova, 2015). The contentof of theanpaper is structured as follows. After Nowadays the cost of simple laboratory equipment for limitations such approach from the pedagogical view. Nowadays the cost of simple laboratory equipment for demonstration of basic principles of control theory deThe content of the paper is structured as follows. After demonstration of basic principles of control theory dethe Introduction chapter chapter describes the content of the paperthe is second structured as follows. After Nowadays the of cost of simple equipment for The the Introduction chapter chapter describes the creased rapidly thanks to the laboratory implementation of microdemonstration basic principles of control theory deThe content of the paperthe is second structured ascircuit follows. After the Introduction chapter the second chapter describes the microcontroller in combination with RC and its creased rapidly thanks to the implementation of microdemonstration of basic principles of control theory demicrocontroller in combination with RC circuit and its controllers. Thisthanks kind of equipment (e.g. thermo-optocreased rapidly to the implementation of microthe Introduction chapter the second chapter describes the possible usage within the Matlab/Simulink environment. controllers. This kind of equipment (e.g. thermo-optomicrocontroller in combination with RC circuit and its creased rapidly to equipment thesystem, implementation of micro- possible usage within the Matlab/Simulink environment. controllers. Thisthanks kind of (e.g. thermo-optomechanical system, hydraulic magnetic levitation microcontroller in combination with RC circuit and its The next chapter presents the static and dynamic remechanical system, hydraulic system, magnetic levitation possible usage within the Matlab/Simulink environment. controllers. This kind of equipment (e.g. thermo-optoThe nextusage chapter presents the static and environment. dynamic remechanical system, hydraulic system, to magnetic levitation system, etc.) uses the USB interface be connected dipossible within the Matlab/Simulink system, etc.) uses the USB interface to be connected disponses. Arduino and Matlab codeand are dynamic included reas The nextThe chapter presents the static mechanical hydraulic system, magnetic levitation rectly to thesystem, students’ laptops without necessity to buy The Arduino and Matlab code are included as system, the USB interface to be connected di- sponses. The next chapter presents the static dynamic responses. The Arduino and Matlab codeand are included as well as graphical outputs of measurements. In Conclusion rectly toetc.) the uses students’ laptops without necessity to buy system, etc.) uses the USB interface to be connected diwell as graphical outputs of measurements. In Conclusion rectly to the students’ laptops without necessity to buy This work sponses. The Arduino and Matlab code are included as has been partially supported by the grants APVV SK well as graphical outputs of measurements. In Conclusion This work hasstudents’ been partially supported by thenecessity grants APVV SKrectly to the laptops without to buy This work hasand IL-RD-18-0008 VEGA 1/0745/19. well as graphical outputs of measurements. In Conclusion been partially supported by the grants APVV SKIL-RD-18-0008 and VEGA 1/0745/19. IL-RD-18-0008 and VEGA 1/0745/19. This work hasand been partially supported by the grants APVV SKIL-RD-18-0008 VEGA 1/0745/19. IL-RD-18-0008 andIFAC VEGA 1/0745/19. Federation of Automatic Control) Hosting by Elsevier Ltd. All rights reserved. 2405-8963 © 2019, (International Peer review under responsibility of International Federation of Automatic Control. 10.1016/j.ifacol.2019.12.759 218 Pavol Bisták / IFAC PapersOnLine 52-27 (2019) 217–221 Fig. 2. RC circuit Fig. 1. Arduino Uno board and digital-analog converter MCP4725 chapter the results are evaluated and further development / modification possibilities are discussed. 2. ARDUINO UNO - LOW-COST MICROCONTROLLER PLATFORM This paper is oriented to teaching the control theory basics using learning by doing methodology. The choice of a lowcost microcontroller platform corresponds to this purpose. Although there are several possibilities (e.g. STM, TI) the choice of Arduino Uno has been obvious when taking into account its popularity, support and price. Arduino Uno R3 uses the 8-bit microcontroller ATmega328P that is placed on the development board equipped with input/output (I/O) pins, connectors (USB, power) and other necessary components for operation of microcontroller (Fig. 1). For our purposes it is important that Arduino Uno has analog inputs (6) for signal measurements and digital I/O pins (14) from which 6 pins support PWM signals. Arduino Uno does not have any analog outputs therefore to produce wave signals for frequency characteristics we will have to use an additional board that will serve as a digital-analog converter (12-bit MCP4725). The board of Arduino can be powered also by the USB cable. From the family of RLC-circuits as an introductory dynamical system the RC-circuit has been chosen. It consists just from two passive electrical components, i.e. the resistor and the capacitor as depicted in the Fig. 2. Even students that have no practical experiments with building electrical circuits should be able to construct such an easy circuit by connecting these basic elements with wires on a breadboard. The physical connections of the RC-circuit with the Arduino Uno microcontroller can be seen from the Fig. 3. One can be confused of so many wires but this is caused as a consequence of using D/A converter. Even this converter is effectively activated through I2C it still has six ports to be connected. Basically, the RC circuit is powered from the D9 pin of Arduino. Only in the case of frequency responses the RC circuit is alternatively powered from the output of the D/A converter. The output of the system represented by the voltage on the capacitor is measured using the A0 pin of the Arduino that serves as an 10-bit analog-digital converter. The measurements were carried out with the following numerical values of the electrical components: R = 4700Ω, C = 3, 3µF . To program the Aruduino boards we can use several tools from which the Arduino Integrated Development Environment (IDE) is the most known (Fig. 6). This Fig. 3. RC circuit with Arduino and D/A converter in Fritzing enables to write the code for Arduino in the language very similar to the C++ programming language. But programming language for Arduino is not limited to C++. You can use well-known languages as Python, Java, C# and also the Matlab/Simulink in which we are the most interested because this is the language for most of the control theory courses. In fact, we will combine C++ programming in Arduino IDE with Matlab programming. Arduino will send measured data to the Matlab where this will be visualized and identified. 3. MEASUREMENT OF BASIC CHARACTERISTICS OF DYNAMICAL SYSTEMS After the students have built the simple real RC circuit, connect it to the Arduino Uno board (4) and install all necessary software (Arduino IDE and Matlab) they can proceed with the measurement of basic characteristics of such a system. In the following sections we will describe how Arduino can be used for measurement of input-output characteristic, step and frequency responses. 3.1 Input-output characteristic of RC circuit Although the input-output characteristic does not provide us with the information about the dynamics of the circuit it still belongs to the most important information in the control theory. It allow us to identify the gain of the system as a ratio of steady-state output to the constant input. By measurement at different inputs we can identify if the system is linear or nonlinear one. The gain parameter and the linearity of the system play crucial role in the control Pavol Bisták / IFAC PapersOnLine 52-27 (2019) 217–221 219 Fig. 4. Real RC circuit connected to Arduino and D/A converter Input-output response 5 4.5 4 3.5 Vout [V] 3 Measured Simulated 2.5 2 1.5 Fig. 6. Code from Arduino IDE for performing inputoutput characteristics 1 0.5 0 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Vin [V] Fig. 5. Input-output characteristics of RC circuit after collection all data starts to plot them. The resulting I/O characteristic is depicted in the Fig. 5 where it is visible that in this case there is no big difference between the measured and simulated characteristics. theory and therefore it is important to let students work with a real systems from the very beginning. 3.2 Step response of RC circuit The RC circuit is the simple one and therefore it is suitable for beginner in the control theory. In the Fig. 5 they can see the linear input-output characteristic corresponding to the RC circuit. From this example students can not only identify the linearity of the system but calculate the gain of the system as well when they express the quotient of the linear relation. It determines the slope of the I/O characteristic also visible from the plot in the Fig. 5. After knowing the gain of the system, students would like to investigate the dynamics of the RC circuit. The step response is the first dynamic characteristic that shows the behavior in relation with time. In this simple example this corresponds to the identification of the time constant of the RC circuit. From the theory we know that the time constant of the first order dynamical system can be calculated using step response from the time when the output reaches the 63% of the steady-state value. The question is what students have to do in order to be able to measure such characteristics. The must write to short programs. One for Arduino and another one for Matlab. At this stage they should already know the basics of the C-language and therefore it could not be difficult for them to understand or modify the code that is displayed in the Fig. 6. They should also be familiar with Matlab to have possibility to customize the code presented in the Fig. 7. Both software use serial communication. In fact, Matlab waits until it starts receiving message. Arduino measures the real data and sends it to the Matlab that To program the measurement of the step response there is no big difference in comparison with the measurement of I/O characteristic. In comparision with the previous case now Arduino sends to Matlab two values: output and time. We do not present the Arduino and Matlab codes here. But the resulting step response can be found in the Fig. 8. As in the I/O characteristic also here the measured and simulated step response do not differ significantly. Of course, one can mention that the real data are influenced by a small noise. After finishing this experiment students Pavol Bisták / IFAC PapersOnLine 52-27 (2019) 217–221 220 0 Amplitude frequency response -2 Gain [dB] -4 Measured Simulated -6 -8 -10 -12 -14 10-1 100 101 102 Frequency [Hz] Fig. 9. Amplitude frequency responses of RC circuit 3.3 Frequency response of RC circuit To measure the frequency characteristics with the only help of Arduino Uno is not so easy task as the previous ones. Here the limits of Arduino as a low-cost platform are apparent. The main problem is caused by the lack of a harmonic signal generator. Arduino itself is not able to produce sinusoidal signal with higher frequency. Although we extended the Arduino with D/A converter and the sinusoidal values have been pre-calculated and stored in tables we were able to measure frequency responses up to 50 Hz. The measurement was not precise and this time the differences between the measured and simulated response are significant (Fig. 9). Fig. 7. Matlab code for performing input-output characteristics 4. CONCLUSIONS Step response 5 Measured Simulated 4.5 Output voltage Vout [V] 4 3.5 3 2.5 2 1.5 1 0.5 0 500 510 520 530 540 550 560 Although this activity could be for students the most difficult one in comparison with the previous cases we recommend to let student measure also the frequency responses at least in a few points because this topic of the control theory study is usually not well understood. 570 580 590 600 Time [ms] Fig. 8. Step responses of RC circuit should know the gain of the system and also its time constant. So they can continue with advance topics. They can start to design simple controllers or they can continue with measurement of frequency responses. In order to provide each student with the equipment for experimentation, in this paper we focused to the usage of the Arduino Uno platform for the measurement of static and dynamic characteristics of dynamical systems. Arduino is able to communicate through the serial interface with Matlab that serves for comfortable visualization and archiving of the measured data. The students are engaged in the learning process when they have to build their own circuits and program microcontrollers to measure the characteristics. Their work could be personalized because Arduino low-costs platform is accessible for everyone. We have presented precise measurement in the case of I/O and step characteristics but we have also mentioned the disadvantages of the low-cost platform when measuring the frequency responses. For the future we will try not to replace the Arduino by expensive signal generators and scopes but find cheap solutions using electronic oscilators and a little bit powerful types of microcontrollers. REFERENCES T. Bosak and K. Zakova. Node.js based remote control of thermo-optical plant. Proceedings of 2015 12th Interna- Pavol Bisták / IFAC PapersOnLine 52-27 (2019) 217–221 tional Conference on Remote Engineering and Virtual Instrumentation, REV 2015, pages 209–213, 2015. M. Huba and M. Halás. Hydraulic plants for face-to-face training and remote experiments. ICETA 2011 - 9th IEEE International Conference on Emerging eLearning Technologies and Applications, Proceedings, pages 79– 81, 2011. doi: 10.1109/ICETA.2011.6112590. T. Huba and M. Huba. Experimenting with a nonlinear thermo-opto-mechanical system TOM1A. IFAC-PapersOnLine, 48(29):188–193, 2015. doi: 10.1016/j.ifacol.2015.11.235. M. Kalúz, J. Garcı́a-Zubı́a, M. Fikar, and L. Čirka. A flexible and configurable architecture for automatic control remote laboratories. IEEE Transactions on Learning Technologies, 8(3):299–310, 2015. doi: 10.1109/TLT.2015.2389251. T. Malatinec, V. Popelka, M. Huba, and P. Hudačko. Laboratory model helicopter control using a lowcost arduino hardware. Proceedings of the 2014 15th International Carpathian Control Conference, ICCC 2014, pages 326– 331, 2014. doi: 10.1109/CarpathianCC.2014.6843621. B. Messner, R. Hill, and JD. Taylor. Control Tutorials for Matlab and Simulink Activity 2 Part (a): Time-Response of an Inductor–Resistor–Capacitor (LRC) Circuit. http://ctms.engin.umich.edu/CTMS/index.php? aux=Activities LRCcircuitA, 2017. Accessed: 2019-5-23. J. Sáenz, J. Chacón, L. De La Torre, A. Visioli, and S. Dormido. Open and low-cost virtual and remote labs on control engineering. IEEE Access, 3:805–814, 2015. doi: 10.1109/ACCESS.2015.2442613. N. Suwondo and D. Sulisworo. Hands-on Learning Activity Using an Apparatus for Transient Phenomena in RC Circuit Based on Arduino UNO R3-LINXLabview. iJOE International Journal of Online and Biomedical Engineering, 13(1):116–124, 2017. doi: 10.3991/ijoe.v13i01.6317. G. Takács. AutomationShield - Control Systems Engineering Education. www.automationshield.com, 2019. Accessed: 2019-09-24. G. Takács, T. Konkoly, and M. Gulan. Optoshield: A low-cost tool for control and mechatronics education. 2019 12th Asian Control Conference, ASCC 2019, pages 1001–1006, 2019. S. Weis. Using an arduino to measure frequency response and current-voltage device characteristics in electronics labs. Proceedings of the 2014 ASEE Gulf-Southwest Conference, New Orleans, Louisiana, USA, 2014. 221