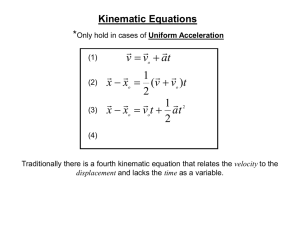
Derivation of Kinematic Equations Sama Ehab, Mirna Amr, Nancy Mohamed, Salma Ammar 𝒗𝒊 + 𝒗𝒇 𝜟𝒙 = ( )𝜟𝒕 𝟐 Δ𝑥 • Average velocity is represented as: 𝑣 = • Average velocity can also be represented as: 𝑣 = • Rearrange the equation above to solve for Δ𝑥 Δ𝑡 𝑣𝑖 +𝑣𝑓 2 Δ𝑥 = 𝑣Δ𝑡 • 𝑣𝑖 +𝑣𝑓 Substitute 𝑣 with 𝑣𝑖 + 𝑣𝑓 Δ𝑥 = ( )Δ𝑡 2 2 in the equation above to get our first kinematic equation. 𝛥𝑥 = 1 𝑏𝑎𝑠𝑒 × ℎ𝑒𝑖𝑔ℎ𝑡 + (𝑙𝑒𝑛𝑔𝑡ℎ × 𝑤𝑖𝑑𝑡ℎ) 2 𝛥𝑥 = 1 𝛥𝑡 𝑣𝑓 − 𝑣𝑖 + 𝑣𝑖 × 𝛥𝑡 2 1 1 = 𝑣𝑓 𝛥𝑡 − 𝑣𝑖 𝛥𝑡 + 𝑣𝑖 𝛥𝑡 2 2 1 1 = 𝑣𝑓 𝛥𝑡 + 𝑣𝑖 𝛥𝑡 2 2 Δ𝑥 = ( o We know that the area under the graph is the displacement (Δ𝑥). 𝑣𝑓 + 𝑣𝑖 )𝛥𝑡 2 𝒗𝒇 = 𝒗𝒊 + 𝒂𝜟𝒕 Δ𝑣 Δ𝑡 • Acceleration is represented as: 𝑎 = • Substitute Δ𝑣 with 𝑣𝑓 − 𝑣𝑖 𝑣𝑓 − 𝑣𝑖 𝑎= Δ𝑡 • Rearrange the equation above to solve for 𝑣𝑓 𝑣𝑓 = 𝑣𝑖 + 𝑎Δ𝑡 𝑣𝑓 = 𝐵𝐶 𝑣𝑓 = 𝐵𝐷 + 𝐷𝐶 𝑣𝑓 = 𝐵𝐷 + 𝑣𝑖 𝑎= 𝐵𝐷 𝐴𝐷 𝑎= 𝐵𝐷 Δ𝑡 𝐵𝐷 = 𝑎Δ𝑡 𝑣𝑓 = 𝑣𝑖 + 𝑎Δ𝑡 𝟏 𝜟𝒙 = 𝒗𝒊 𝜟𝒕 + 𝒂𝜟𝒕𝟐 𝟐 𝑣𝑖 +𝑣𝑓 • Start with the first kinematic equation (XVT) Δ𝑥 = • Substitute 𝑣𝑓 with our second kinematic equation (VAT) 𝑣𝑓 = 𝑣𝑖 + 𝑎Δ𝑡. Δ𝑥 = 𝑣𝑖 + (𝑣𝑖 + 𝑎Δ𝑡) Δ𝑡 2 2𝑣𝑖 𝑎Δ𝑡 + Δ𝑡 2 2 • Expand the equation • Simplify the equation Δ𝑥 = 𝑣𝑖 Δ𝑡 + 𝑎Δ𝑡 2 Δ𝑥 = 1 2 2 Δ𝑡. 𝛥𝑥 = 1 𝑏𝑎𝑠𝑒 × ℎ𝑒𝑖𝑔ℎ𝑡 + (𝑙𝑒𝑛𝑔𝑡ℎ × ℎ𝑒𝑖𝑔ℎ𝑡) 2 = 1 Δ𝑡 𝐵𝐷 + (𝑣𝑖 × Δ𝑡) 2 𝑎= 𝐵𝐷 𝐴𝐷 𝑎= 𝐵𝐷 Δ𝑡 𝐵𝐷 = 𝑎Δ𝑡 = 1 Δ𝑡 𝑎Δ𝑡 + 𝑣𝑖 Δ𝑡 2 1 𝛥𝑥 = 𝑣𝑖 𝛥𝑡 + 𝑎𝛥𝑡 2 2 𝒗𝟐𝒇 = 𝒗𝟐𝒊 + 𝟐𝒂𝜟𝒙 • 𝑣𝑖 +𝑣𝑓 Start with the first kinematic equation (XVT) Δ𝑥 = ( • 2 )Δ𝑡. Use the second kinematic equation (VAT) 𝑣𝑓 = 𝑣𝑖 + 𝑎Δ𝑡, and rearrange it to solve for t. 𝑣𝑓 − 𝑣𝑖 Δ𝑡 = 𝑎 𝑣𝑓 − 𝑣𝑖 • Substitute Δ𝑡 in our first equation with . 𝑎 𝑣𝑖 +𝑣𝑓 Δ𝑥 = ( 2 𝑣𝑓 − 𝑣𝑖 )( 𝑎 ). 𝑣𝑓2 −𝑣𝑖2 • Multiply the fractions and simplify Δ𝑥 = ( • We can rearrange the equation above to solve for 𝑣𝑓2 𝑣𝑓2 = 𝑣𝑖2 + 2𝑎Δ𝑥 2𝑎 ). 1 Δ𝑥 = (𝑏𝑎𝑠𝑒1 + 𝑏𝑎𝑠𝑒2)(ℎ𝑒𝑖𝑔ℎ𝑡) 2 1 Δ𝑥 = 𝑣𝑖 + 𝑣𝑓 Δ𝑡 2 𝑣𝑓 − 𝑣𝑖 𝑎= Δ𝑡 Δ𝑡 = = 𝑣𝑓 − 𝑣𝑖 𝑎 1 𝑣 + 𝑣𝑓 2 𝑖 𝑣𝑓 − 𝑣𝑖 𝑎 1 𝑣𝑓2 − 𝑣𝑖2 = 2 𝑎 2𝑎Δ𝑥 = 𝑣𝑓2 − 𝑣𝑖2 𝑣𝑓2 = 𝑣𝑖2 + 2𝑎Δ𝑥 Resources “Derivation of Equations of Motion.” Byju’s, 28 June 2018, https://byjus.com/physics/derivation-of-equation-of-motion/#Derivation-of-ThirdEquation-of-Motion. “Kinematic Equations.” Pasco, https://www.pasco.com/products/guides/kinematic-equations. “What are the kinematic formulas?” Khan Academy, https://www.khanacademy.org/science/physics/one-dimensional-motion/kinematicformulas/a/what-are-the-kinematic-formulas. “Derivation of Kinematic Equations.” https://www.muncysd.org/site/handlers/filedownload.ashx?moduleinstanceid=2437&data id=4035&FileName=Kinematic%20Eqns.pdf.