Robotics Tutorial 3
Teaching Assistant: Carlo Cenedese(c.cenedese@rug.nl)
September 21, 2020
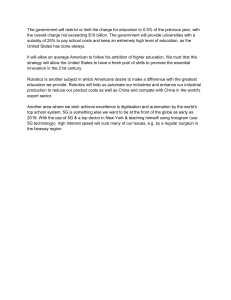
1. Consider the planar PR manipulator shown here:
(a) Find the origin of frame {3} expressed in terms of frame {0}, that is 0 P3org .
Solution
In the following, I will refer to the origin of frame {3} as the tip.
In the base frame {0}, it is easy to derive the coordinates of the tip geometrically.
We have
"
# "
#
x
L
+
L
cos(θ
)
tip
1
2
2
0
P3org =
=
ztip
d1 + L2 sin(θ2 )
(b) Give the 2 × 2 Jacobian that relates the joint velocities to the linear velocity of
0P
3org .
"
J=
∂xtip
∂d1
∂ztip
∂d1
Solution
# "
∂xtip
∂θ2
∂ztip
∂θ2
=
0 −L2 sin(θ2 )
1 L2 cos(θ2 )
#
(c) For what joint values is the manipulator at a singularity? What motion is restricted at this singularity?
Robotics Tutorial 3
2
Solution
The singularity occurs at a configuration when det(J) = 0.
det(J) = J11 J22 − J12 J21 = L2 sin(θ2 ).
So the singularity occurs whenever sin(θ2 ) = 0, which corresponds to:
θ2 = 0◦ or ± 180◦
These two situations are portrayed below; either the arm is extended out completely or folded over itself. In both cases, the end-effector cannot move instanta-
neously in the X̂ direction, i.e., the joints cannot produce a velocity component
in the X̂ direction.
2
Robotics Tutorial 3
3
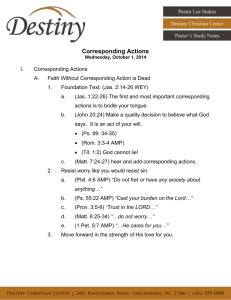
2. Consider the following RRRR manipulator:
It has the following forward kinematics and rotational Jacobian:
√
√
c12 c34 − √22 s12 s34
+ 22 c12 s34
s12 c34 √
0
T
=
4
2
s34
−c12 s34 − √22 s12 c34
−s12 s34√+ 22 c12 c34
2
2 c34
0
2
0
0
0
Jω = 0
1
√
0
0
1
2
2
0
√
2
2
√
2
s
√2 12
2
2√c12
2
2
0
√
2
2
0
,
√
2
2
√
2c12 c3 − s12 (s3 − 1) + c1
√
2s12 c3 + c12 (s3 − 1) + s1
s3 + 1
1
,
(a) Find the basic Jacobian Jo in the {0} frame, for the position q = [0, 90◦ , −90◦ , 0]T .
(q is the vector of joint variables)
Solution
0
∂ 0 Pe
Jv =
∂q1
∂ 0 Pe
∂q2
∂ 0 Pe
∂q3
∂ 0 Pe
∂q4
where 0 Pe is from the last column of 04 T . Thus
√
√
√
− 2s12 c3 − c12 (s3 − 1) − s1 − 2s12 c3 − c12 (s3 − 1) − 2c12 s3 − s12 c3 0
√
√
√
Jv =
2c12 c3 − s12 (s3 − 1) + c1
2c12 c3 − s12 (s3 − 1) − 2s12 s3 + c12 c3 0
0
0
c3
0
Substitute q = [0, 90◦ , −90◦ , 0]T , and join with 0 Jω (which was directly given to
Robotics Tutorial 3
4
us) to get:
0
3
0
0
0 0
√
2
2
0 0
0 √12
0
Jo =
0 0
1 1
0
√1
2
0
0
0
√1
2
0
√1
2
(b) A general force vector is applied to the origin of frame {4} and measured in frame
{4} to be 4 Fapp = [0, 6, 0, 7, 0, 8]T . For the position in (a), determine the joint
torques that statically balance it.
Solution
We are given a 6 × 1 force/moment vector Fapp which is exerted on the robot.
If the arm is statically balancing this, then we know that the robot must be
exerting an equal and opposite force/moment vector at the origin of frame {4}.
So we know that in the coordinates of frame {4}, the vector 4 F4 = −4 Fapp and
we want to find the joint torques τ corresponding to 4 F4 .
Recall that τ = J T F . To multiply F and J, however, they must be in the same
frame. You can transform either the J from frame {0} to {4}, or transform F
from frame {4} to {0}. Both give the same answer.
4
F4 = −4 Fapp = −[0, 6, 0, 7, 0, 8]T ,
"
#
0R
0
0
4
4
F4 =
F4
0 04 R,
and then,
τ = 0 JoT 0 F4 = −[18.707, 12.707, 16.485, 8.0]T
Robotics Tutorial 3
5
3. Consider the RP spatial manipulator shown below. The links of this manipulator
are modeled as bars of uniform density, having square cross-sections of thickness h,
lengths of L1 and L2 , and total masses of m1 and m2 , with centers of mass shown.
Assume that the joints themselves are massless.
(a) Calculate the kinetic energy K(q̇, q).
Solution
The formula that has to be used is (6.69) and (6.70).
1
1i T
T
ki = mi vC
v
+
ω
C
i
i
2
2 i
Ci i
Ii ωi
The first joint is revolute, hence the linear velocity can be obtained using the
relation vi = li θ̇i , the component related to the angular velocity is trivial, since
ωi = [0 0 θ̇i ]T with i = {1, 2}.
2
1
1 C1
1
k1 = m1
L1 θ̇1 +
Izz,1 θ̇12
2
2
2
Note that the distance of the second center of mass from the second joint is equal
to d2 therefore the kinetic energy is:
1
1
2 2
2
˙
k2 = m2 L1 θ̇1 + d2 + Izz,2 θ̇12
2
2
Note that in this second case the rotational component is due only to joint one,
instead the linear one is associated to both of them.
The kinetic energy is therefore equal to: K(q̇, q) = k1 + k2
(b) Assume that gravity pulls things along the −Z0 axis and g the gravity constant,
compute the potential energy U (q)
Robotics Tutorial 3
6
Solution
Recall the potential energy formula (6.73):
ui = −m0i gT 0 PCi + uref,i
where 0 gT is the gravity vector in the frame {0}, so in this case 0 gT = [0 0 − g].
In this case only the second link presents a center of mass with a component
different from zero along Z0 , so subjected to the potential energy.
u1 = 0 ,
u2 = m2 gd2
Finally U (q) = u2 .
(c) As final step use the previous results to compute the equations of motion
Solution
The equations of motions are obtained computing first the Lagrangian of the
manipulator.
L(q̇, q) = K(q̇, q) − U (q)
Then,
d ∂L(q̇, q) ∂L(q̇, q)
−
=τ
dt ∂ q̇
∂q
That is translated to:
1
2
2
∂K(q̇, q) ( m1 L1 + m2 L1 + Izz,1 + Izz,2 )θ̇1
= 4
∂ q̇
m2 d˙2
" #
∂K(q̇, q)
0
=
∂q
0
"
#
∂U (q)
0
=
∂q
m2 g
So the equations of motion are:
1
2
2 C1
τ1 =
m1 L1 + m2 L1 + Izz,1 + Izz,2 θ̈1
4
τ2 = m2 d¨2 + m2 g
Robotics Tutorial 3
7
4. Plan a trajectory θ(t) with t ∈ [0, 2] such that
θ(0) = 1, θ(2) = 10
the initial and final velocity is 0
the accelleration at t = 0.5 s and t = 1.5 s is 0
Use a polynomial curve with powers of the minimum order to achieve the result.
Solution
The trajectory is described by
θ(t) = a0 + a1 t + a2 t2 + a3 t3 + a4 t4 + a5 t5
and the
as
1
1
0
0
0
0
|
system of equation that has to be solved can be expressed in a matrix form
0
2
1
1
0
0
0
0
0
0
a0
1
a0
1
4
8
16
32 a1 10
a1
10
0
0
0
0 a2 0
a2
−1 0
=
=⇒
=
B
a3
0
3 3(2)2
4(2)3
5(2)4 a3 0
2
3
a4
0
2
3
12(0.5) 20(0.5) a4 0
2
3
2 6(1.5) 12(1.5) 20(1.5)
a5
0
a5
0
{z
}
B
a0
1
a1
0
a 40.5
2
Therefore the solution is =
a3 −19.125
a4 −13.5
a5
6.75
5. Consider the dynamical system
(
ẋ1 = −ax1 + 4x2
ẋ2 = −bx1 − x32
where
a, b ∈ (0, +∞)
Find all the equilibrium point and study its stability by means of the Lyapunov
function V (x1 , x2 ) := x21 + cx22 , with c ∈ R.
Solution
The only equilibrium point is in the origin, since
(
(
0 = −ax1 + 4x2
x1 = a4 x2
=⇒
0 = −bx1 − x32
bx1 = −x32
=⇒
(
x1 = a4 x2
2
x2 ( 4b
a + x2 ) = 0
Robotics Tutorial 3
8
The time derivative of the Lyapunov function is equal to:
"
#
h
i −ax + 4x
1
2
V̇ (x1 , x2 ) = 2x1 ẋ1 + 2cx2 ẋ2 = 2x1 2cx2
−bx1 − x32
= −2ax21 + (8 − 2cb)x1 x2 − 2cx42
If we choose c = 4b > 0, then V̇ (x1 , x2 ) < 0 ∀x1 , x2 6= 0 and V (x1 , x2 ) is positive
semi definite. Therefore, the origin is globally asymptotically stable for any value of
a, b ∈ (0, +∞) and c = 4b > 0.