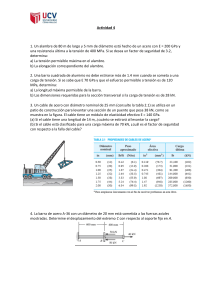
UNIVERSIDAD SANTO TOMAS – BUCARAMANAGA Facultad de Ingeniería Mecatrónica DINÁMICA Semestre: 2020-II 03/09/2020 Ejercicios de Clase Cinemática de Cuerpos Rígidos y j I3 -41 k 3 -31 k 21 k 4 30° α21=0 x i 2 VC31=VC21 R I2 ANÁLISIS DE VELOCIDADES Análisis del Disco C (Rodadura cilíndrica externa) V1 C 2 w21 IC w21 w k IC R j V1 C 2 w k R j V1 C 2 wRi Centro Instantáneo de Rotación CIR CIR 3 (B) (Punto donde se cruzan las I3 VB=0 Perpendiculares a la línea de la Trayectoria de la Velocidad de B Trayectoria de cada Partícula (B y C) 21 k CIR 4 I4 Trayectoria de la Velocidad de C R CIR 2 I2 Como en la partícula B para este instante de tiempo dado coincide en centro instantáneo de rotación de la barra AB, el punto B es I3 y la VB31 = 0 = VB41 w31=? Velocidad angular de la barra BC UNIVERSIDAD SANTO TOMAS – BUCARAMANAGA Facultad de Ingeniería Mecatrónica DINÁMICA Semestre: 2020-II Ejercicios de Clase Cinemática de Cuerpos Rígidos Análisis de Velocidades en el Cuerpo Rígido (3) - Barra BC V1 B 3 V1 C 3 w31 CB V1 B 3 0 V1 C 3 V1 C 2 wR i w31 w31 k CB 4 R j 0 wR i w31 k 4 R j 0 wR i 4 Rw31 i ii 0 wR 4 Rw31 w31 1 w 4 ( k ) Velocidad Angular de (3) Barra BC a) Velocidad Angular de AB, w41=0 Porque VA=0 y VB=0 ANÁLISIS DE ACELERACIONES b) Aceleración Angular de AB, α41=? Análisis Disco C (Rodadura cilíndrica externa) a1C 2 21 IC 2 w21 R IC (3 R R ) w21 es constante entonces 21 0 a1C 2 w2 R Rj (3 R R ) a1C 2 1 2 w Rj 4 Anális Barra BC (cuerpo rígido 3) Ecuación de Aceleraciones movimiento general plano 2 a1B 3 a1C 3 31 CB w31 CB Para calcular la aB debo analizar la Barra AB (cuerpo rígido (4)) Ecuación de aceleraciones moviento plano 2 a1B 4 a1A 4 41 AB w41 AB a1A 4 0 w41 0 41 ? AB 4 R cos 30 i 4 Rseno 30 j 2 3 R i 2 R j a1B 4 41 k 2 3 R i 2 R j a1B 4 2 3 R 41 j 2 R 41 i Ecuación del Vector Aceleració n B 03/09/2020 UNIVERSIDAD SANTO TOMAS – BUCARAMANAGA Facultad de Ingeniería Mecatrónica DINÁMICA Semestre: 2020-II 03/09/2020 Ejercicios de Clase Cinemática de Cuerpos Rígidos Ahora en la Ecuación de Aceleraciones movimiento general plano en la Barra BC (cuerpo rígido 3) a1B 3 a1B 4 2 3 R 41 j 2 R 41 i 2 a1B 3 a1C 3 31 CB w31 CB 2 3 R 41 j 2 R 41 2 3 R 41 j 2 R 41 2 1 i w Rj 31 k 4 Rj w 4 Rj 4 4 1 1 i w 2 Rj 4 R 31 i Rw 2 j 4 4 1 2 ii 2 R 41 4 R 31 31 1 2 41 j j 2 3 R 41 1 4 w2 R 1 4 Rw 2 41 1 w2 3 w2 12 4 3 Como el resultado es ( ) entonces el sentido considerad o para 41 esta bien, es -k 41 3 12 w2 ( k ) Aceleració n Angular del cuerpo rígido (4) barra AB -α21 k aC21t -21 k 2 I2 OC = BC = 4R α31 k 31 k R 30° 3R 30° aC21n 3 VC21 =VC31 30° VB31 = V i (Constante) aB31 = 0 UNIVERSIDAD SANTO TOMAS – BUCARAMANAGA Facultad de Ingeniería Mecatrónica DINÁMICA Semestre: 2020-II 03/09/2020 Ejercicios de Clase Cinemática de Cuerpos Rígidos Análisis de Velocidades Análisis de la Barra BC (Cuerpo Rígido 3) |BC|= 4R ____ V1 C 3 V1 B 3 w31 BC V1C 3 seno 30 i V1C 3 cos 30 j Vi w31 k ( 4 R cos 30 i 4 Rseno 30 j ) 1 C3 3 C3 V1 i V1 j Vi 2 3 R w31 j 2 R w31i 2 2 ii 1 C3 V1 V 2 R w31 2 j j (1) 3 C3 V1 2 3 R w31 2 1 C3 w31 V1 ( 2) 4R Reemplazan do (2) en (1) se tiene : 1 C3 1 C3 V1 V 2 R V1 2 4R 1 C3 1 C3 V1 V1 V 2 2 C3 V1 V Entonces el vector V1C 3 y w31 1 3 V i V j 2 2 1V w31 k La velocidad angular de la Barra " si" es Antihorari o 4R V1 C 3 Análisis de velocidades del Disco C (Cuerpo Rígido 2) (Rodadura cilíndrica externa) V1 C 2 w21 I 2 C w21 w21 k ? I 2 C R cos 30 i Rseno 30 j 3 1 Ri R j 2 2 1 3 V i V j 2 2 Reemplazan do : V1 C 2 V1 C 3 3 1 3 1 V i V j w21 k R i R j 2 2 2 2 1 3 3 1 V i V j R w21 j R w21 i 2 2 2 2 ii 1 1 V R w21 2 2 j j w21 V R 3 3 V V R w21 w21 2 2 R Entonces el vector ve locidad angular del disco : w21 V k R a) Respuesta La velocidad angular del disco " si" es horario UNIVERSIDAD SANTO TOMAS – BUCARAMANAGA Facultad de Ingeniería Mecatrónica DINÁMICA Semestre: 2020-II 03/09/2020 Ejercicios de Clase Cinemática de Cuerpos Rígidos Análisis de Aceleraciones Análisis de la Barra BC (Cuerpo Rígido 3) |BC|= 4R 2 a1C 3 a1B 3 31 BC w31 BC 1V k 4R 0 (V1 B 3 Constante) w31 a1B 3 2 1V a1C 3 0 31 k ( 4 R cos 30 i 4 Rseno 30 j ) 4 R cos 30 i 4 Rseno 30 j 4 R a1C 3 2 3 R 31 j 2 R 31i 3V2 1V2 i j 8 R 8 R 3V2 1V 2 a1C 3 2 R 31 i 2 3 R 31 j 8 R 8 R (1) Análisis de Aceleraciones del Disco C (Cuerpo Rígido 2) (Rodadura cilíndrica externa) a1C 2 21 I 2 C 2 w21 R I 2C (3 R R ) a1C 2 a1C 3 w21 V k R I 2 C R cos 30 i Rseno 30 j 3 1 Ri R j 2 2 Reemplazan do : a1C 2 21 k C2 1 a V R 3 1 R i R j 2 2 4 2 3 1 2 R i 2 R j 3 1 3V2 1V2 R 21 j R 21 i i j 2 2 8 R 8 R 1 3V2 a1C 2 R 21 8 R 2 3 1V2 i R 21 2 8 R j ( 2) (1) = (2) 3V2 1 3 1V 2 3V2 1V2 8 R 2 R 31 i 8 R 2 3 R 31 j 2 R 21 8 R i 2 R 21 8 R ii 3V2 1 3V2 2 R 31 R 21 8 R 2 8 R (3) j j 1V2 3 1V2 2 3 R 31 R 21 8 R 2 8 R ( 4) j UNIVERSIDAD SANTO TOMAS – BUCARAMANAGA Facultad de Ingeniería Mecatrónica DINÁMICA Semestre: 2020-II Ejercicios de Clase Cinemática de Cuerpos Rígidos Despejando α31 de (3) y reemplazando den (4) se tiene: 3V2 8 R 31 2 R 31 1 2 R 21 3V2 8 R ( 3) 3V2 3V2 1 21 16 R 2 16 R 2 4 3V2 1V2 3V2 1 3 1V2 2 3 R R 21 21 2 8 R 16 R 2 4 2 8 R 16 R 1V2 3V2 3V2 8 R 8 R 8 R 3V2 4 R 21 3 R 21 3V2 4 R2 Respuesta b) 3R 3 1V2 21 R 21 2 2 8 R ( 4) 03/09/2020