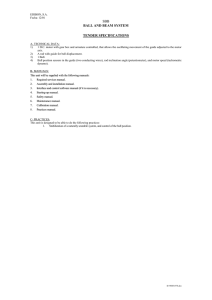
ECE660 Project—Ball on Beam Balancing Spring 2021 A classical example of a complex control problem is the balancing of a ball on a beam. The system comprises a slender beam on which a ball can roll without slipping. The shaft of a d-c motor is firmly attached to the center of the beam, as shown in the figure. The relevant parameters of the system are Beam moment of inertia about its center: Ball mass: Displacement of ball from center: Beam tilt angle: Acceleration of gravity External torque: Motor torque constant: Motor back emf constant: Motor resistance: Motor applied voltage I m r θ g τ K K R e Numerical value (SI units) 0.0125 .05 9.81 0.1 0.1 5. Control input The complete dynamic model of the system is given by (I + mr2 )θ̈ + 2mrṙθ̇ + mgrcosθ = τ 5 r̈ + (g sin θ − rθ̇2 ) = 0 7 (1) (2) Under the “standard” assumptions: • Coriolis and centrifugal accelerations are negligible • θ is a small angle, so sin θ ≈ θ, cos θ ≈ 1 a simpler model is obtained: (I + mr2 )θ̈ + mgr = τ 5 r̈ + (g sin θ = 0 7 (3) (4) This model is still nonlinear owing to the presence of mr2 in the first equation. If we assume that this term is negligible with respect to I (not necessarily realistic), then the model becomes linear. The torque source is a d-c motor, the dynamics of which are; τ = K(e − K θ̇)/R (5) Project The goal of this project is to design a feedback control law which stabilizes the system, i.e., which brings the ball to the center of the beam which is to be in the horizontal position. Project should be submitted as a report, in good technical English, demonstrating the performance achieved (scope traces of ball and beam displacements), explaining how you achieved it (Simulink diagrams, Matlab .m files, calculations, etc.) Animation of the process would be a plus. The project is ”open-ended”. The goal is to produce a control system design that is likely to work if implemented in hardware, and to demonstrate the predicted performance by simulation. The following are some items you could investigate: • Because of presence of the I + mr2 term in (3), the system remains nonlinear. If one assumes that mr2 << I, the model becomes linear. If this assumption is not made, and the Riccati equations are solved with x as a parameter, this becomes a “state dependent Riccati equation” (SDRE) application. It would be of interest to compare performance of a fixed-gain full-state feedback control with the control using SDRE. • Assume that the observed variables are r and θ so the velocities ṙ, θ̇ must be estimated. The dependency on r is also present in the observer design. It would be of interest to compare the performance of the following: – Full=order Kalman filter with and without SDRE – Reduced order observer – High=pass filters (“differentiators”) on r and θ to obtain the requisite time derivatives. • Measurement of θ by means of a potentiometer or shaft encoder is straightforward, but measurement of the ball displacement is problematic. Estimation of r, ṙ might be a feasible alternative. Investigate estimation of r ( and ṙ ) using: –Full order observer –Reduced order observer. • In addition to showing scope traces of performance, it would be of interest to investigate robustness of the designs in which ṙ, θ̇ are estimated, by plotting the Nyquist diagram with the Kalman “forbidden circle” shown. (How to deal with dependency of r is an interesting issue.). 2