Week 11
MEEN356 Computer-Controlled Systems
Instructor: Dr. TieJun (TJ) Zhang
(Email: tiejun.zhang@ku.ac.ae)
April 11-15, 2020
ku.ac.ae
Polar (Nyquist) Plot
𝐺(𝑗𝜔)
2
ku.ac.ae
Nyquist Criterion I
Contour A can be mapped through F(s) into contour B by substituting each point of contour A
into the function F(s) and plotting the resulting complex numbers.
3
ku.ac.ae
Nyquist Criterion I (cont.)
The phase of the poles and zeros outside contour
oscillate and come back to initial (clockwise rotation)
The phase of the zeros inside contour makes a clockwise 360o rotation (c).
The phase of the poles inside contour makes a counterclockwise 360o
rotation (d). Contour B encircles the origin (c) & (d).
(e) Pole-zero
cancellation
4
ku.ac.ae
5
Nyquist Criterion II
V1,V2,V3:
360o rotation
V4,V5:
0o net change
P: number of enclosed open-loop poles
Z: number of enclosed closed-loop poles
{number of zeros of 1+G(s)H(s) inside A}
N: number of counterclockwise rotations
of contour B about the origin
N: number of counterclockwise rotations
of contour B about the point -1
Z: number of closed-loop poles on right
half-plane (unstable)
Nyquist Criterion Examples
ku.ac.ae
6
N=1. Since Z=N+P, we find that Z=2.This means
that the closed-loop system has two closed-loop
poles in the right-half s plane and is unstable.
ku.ac.ae
Nyquist Diagram for Turbine-Generator
Speed Control System with Unity Feedback
Turbine-Generator Speed control:
output frequency control of
electrical power from a turbine
and generator pair.
By regulating the speed, the
control system ensures that the
generated frequency remains
within tolerance.
Deviations from the desired
speed are sensed, and a steam
valve is changed to compensate
for the speed error.
7
ku.ac.ae
8
Sketching a Nyquist Diagram I
The map of segment AD is
the mirror image of the map
of the segment AC
Turbine-Generator Speed Control
System with Unity Feedback
AC: 3 x 90o
-1
ω=0
Around the infinite semicircle
from point C to point D, the
vectors rotate clockwise,
each by 180°. Hence, the
resultant
undergoes
a
counterclockwise rotation of
3 x 180°
At zero frequency
𝑍 =0−0=0
The system is stable
At ω= 43, the Nyquist
diagram
crosses
the
negative real axis. The real
value at the axis crossing is
found to be -0.874.
ku.ac.ae
Sketching a Nyquist Diagram II
If there are open-loop poles situated along the contour, then a detour
around the poles on the contour is required
Each pole’s vector
rotates through +180⁰.
P=0
Each pole’s vector
rotates through -180⁰.
P=3
9
ku.ac.ae
10
Stability Design via Nyquist Diagram
Unity feedback system with:
Thus:
First set K=1 and sketch the Nyquist diagram
K can be increased by
1/0.0083=120.5 before the
Nyquist diagram encircles -1.
At K=120.5 the Nyquist
diagram intersects -1, and
the frequency of oscillation of
the closed-loop system is
15 rad/s.
Next find the point where the Nyquist diagram intersects the negative real axis
and
ku.ac.ae
11
Gain and Phase Margin via Nyquist Diagram
Gain margin and phase margin are two quantitative measures of how stable a system is
Example. Unity feedback system with K=6:
The Nyquist diagram crosses the real axis at a frequency
of 6 rad/s. The real part is calculated to be -0.3. The gain
can be increased by 1/0.3. Hence, the gain margin is:
Find the frequency for which the magnitude is unity: 1.253 rad/s
(requires computational tools). At this frequency, the phase angle
is -112.3°. The difference between this angle and -180° is 67.7°,
which is the phase margin.
ku.ac.ae
12
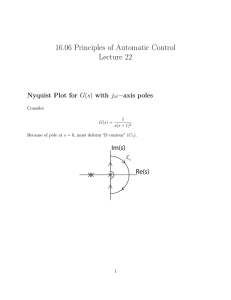
Gain & Phase Margin via Bode Plots
Gain & phase margin: 2 quantitative measures of system stability
Gain
Margin The gain margin is found by using the phase
plot to find the frequency, where the phase
angle is 180°. At this frequency, we look at the
magnitude plot to determine the gain margin.
Phase
Margin
The phase margin is found by using the
magnitude curve to find the frequency where the
gain is 0 dB. On the phase curve at that
frequency, the phase margin is the difference
between the phase value and 180°.
ku.ac.ae
13
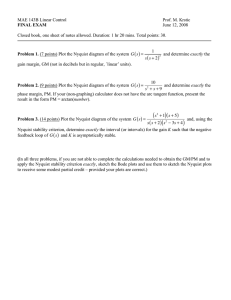
Response Peak and Bandwidth of Close-loop TF
Canonical second-order system
Magnitude of closed-loop frequency response
Response Peak
Maximum value of magnitude response
Increasing with percent overshoot %OS
Peak Frequency
Frequency of magnitude response
peak. For low damping ratio, the
peak occurs at natural frequency.
Bandwidth
The frequency at which the magnitude response curve
is 3 dB down from its value at zero frequency
ku.ac.ae
14
Phase Margin vs. Damping Ratio
Unity feedback system with an open-loop function
When
Frequency
Phase Angle
Phase margin increases with
decreasing percent overshoot
Phase Margin
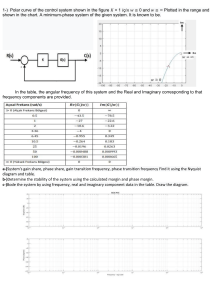
Identifying Transfer Function from Experiment
K=0.11
Identified
Transfer
Function
Original
Transfer
Function
ku.ac.ae
15
Thank You
ku.ac.ae