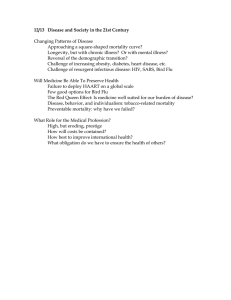
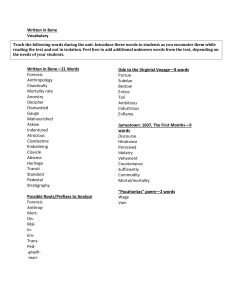
Mathematical Population Studies, 13:1–18, 2006 Copyright # Taylor & Francis Group, LLC ISSN: 0889-8480 print=1543-5253 online DOI: 10.1080/08898480500452109 Extending Lee–Carter Mortality Forecasting Piet de Jong Leonie Tickle Actuarial Studies, Macquarie University, Sydney, Australia The Lee–Carter method for mortality forecasting is outlined, discussed and improved utilizing standard time series approaches. The new framework, which integrates estimation and forecasting, delivers more robust results and permits more detailed insight into underlying mortality dynamics. An application to women’s mortality data illustrates the methods. Keywords: Lee–Carter method; forecasting; Kalman filtering; mortality 1. INTRODUCTION Figure 1 represents the mortality rates, in logarithm, of Australian women and female children from ages from 0 to 100 and calendar years 1921 to 2000. This data set is analyzed in Booth et al. (2002). The so-called ‘‘Lee–Carter’’ (LC) method (Lee and Carter, 1992) is often used to forecast mortality rates. We aim to improve on the LC approach by strengthening both the modeling and estimation framework. Additional previous work related to the LC method includes Bozik and Bell (1987), Bell and Monsell (1991), Bell (1992), Lee and Miller (2001) and Bell (1997). Wilmoth (1993) suggested improvements in the modeling basis and computational methods. Girosi and King (2004), in a forthcoming book, suggest an alternative Bayesian approach, while a two dimensional spline approach is developed in Currie et al. (2002). The Lee–Carter method utilizes singular value decomposition (SVD) estimation, discussed in Section 3.1. An alternative least squares estimation method is developed in Section 3.2. The overparametrization of the raw form of the LC model leads to fitted age-related Address correspondence to Piet de Jong, Department of Actuarial Studies, Division of Economic and Financial Studies, Macquarie University, NSW 2109, Australia. E-mail: pdejong@efs.mq.edu.au 1 2 P. de Jong and L. Tickle FIGURE 1 Log-mortality of Australian women and female children, 1921–2000. functions likely to be too jagged. In Section 4 we introduce a ‘‘smooth’’ version of the LC model, called LC(smooth), which retains the attractive features of LC but with a minimal parametrization. In Section 5, we discuss maximum likelihood estimation applicable even with more detailed time series specifications. In Sections 6 and 7, we discuss extensions and specializations of the LC(smooth) model. 2. THE LEE–CARTER METHOD AND EXTENSIONS Let yit be the logarithm of the central mortality rate at age i ¼ 0; 1; . . . ; p and time t ¼ 1; . . . ; n. Put yt ðy0t ; . . . ; ypt Þ0 . Lee and Carter (1992) proposed to model mortality as: yt ¼ a þ bat þ Et ; t ¼ 1; . . . ; n: ð1Þ where a and b are ðp þ 1Þ-vectors of unknown parameters, Et is a vector of disturbance terms, and at is a parameter varying with time such as a random walk with drift. Here a measures the time invariant age effect on mortality and b the age response to mortality trends. Parameters a and b and the time series at are to be estimated. Put Y ðy1 ; . . . ; yn Þ, implying Y is a ðp þ 1Þ n matrix. Then a is estimated as the vector of row means of Y denoted y with components Extending Lee–Carter Mortality Forecasting 3 equal to the average log-mortality over the period for each age. The SVD is then used on the mean corrected log-mortality rates: Y y10 ’ UDV 0 where 1 denotes a column vector of ones and ’ indicates the retention of a small number of the largest singular values. Then bb ¼ U, ðb a1 ; . . . ; b an Þ ¼ DV 0 , and hats indicate estimates. Lee and Carter (1992) proposed only the first singular P retaining P value and used the normalization bb ¼ 1 and b a ¼ 0. Other authors among those mentioned above have proposed using two or more components to model mortality improvements. In the latter case, at is a vector and b a matrix with one column for each component of at . Improvements include the specification yt ¼ Xa þ Xbat þ Et : ð2Þ Here X is a known ‘‘design’’ matrix with more rows than columns unless X ¼ I in which case (2) reduces to (1). As in (1), a and b are unknown while at is a time series. We call this model the LC(smooth) model. Model (2) is developed and discussed in Section 4, after the evaluation of (1) in the next subsections. In models (1) or (2), smoothness across time results from imposing a time series structure on at . 2.1. Forecasting using the LC Approach In the original formulation, Lee and Carter (1992) suggested an adjustment to b at so that the model reproduced the observed total annual deaths. Alternative criteria for this ‘‘second stage estimation’’ have also been proposed (Lee and Miller, 2001; Booth et al., 2002). However b at is derived, a time series model is fitted to the estimates. Lee and Carter (1992) found that a simple random walk with drift was an appropriate model for the U.S. data they studied, and although they highlighted the possibility of more general models, the random walk with drift is typically used in applications. In the general case where more than one singular value is retained, time series models are fitted to each component of b at . The components are then forecast together with appropriate error bounds. Multiplying the forecast components b anþs by the estimated age effects bb and adding ab gives the forecast age specific log-mortality. Thus the forecast logmortality rates out to year n þ m are anþ1 ; . . . ; b anþm Þ; ab10 þ bbðb ð3Þ where n is the latest observed time point. Cohort aged k at year t ¼ n is thus forecast to experience future log-mortality displayed along subdiagonal k þ 1 of (3). Cohorts to be born at t ¼ n þ k are predicted to 4 P. de Jong and L. Tickle experience mortality corresponding to superdiagonal k 1 of (3). And the approximate proportional change in mortality rate at the different ages out to year n þ m are forecast as bbðb anþm b an Þ. 2.2. Application to Women’s Mortality Data The Australian women’s mortality data are now used to illustrate the LC approach, thereby providing a basis for comparison. Only one singular value is retained, and b at is re-estimated as in the original Lee and Carter (1992) formulation. The top left panel of Figure 2 shows y, termed the base rates, which is the estimate of a. The bottom left panel shows the time series plot of b at corresponding to the first singular value. This is close to a straight line, which suggests an exponential decline in mortality over the period. The top right panel shows the estimate of b constructed using the SVD method and hence the response by age to the general improvement in mortality over time. The younger ages appear the most responsive to the improving trend in mortality. The downward bump around age 17 indicates decreased response to the improving trend on account of increased traffic related mortality. The bottom right panel shows fitted year 2000 log-mortalities and forecast log-mortalities at 10-year intervals from 2010 to 2040. Forecast log-mortalities for 2050 have also been shown to enable comparison with the results in Figure 8. FIGURE 2 Results from a Lee–Carter analysis of women’s mortality data. Extending Lee–Carter Mortality Forecasting 5 For Australian women’s mortality data, time series analysis shows that b at is adequately described by a random walk with drift 2.34 and standard deviation 5.04. The average age effect is 0.0099, which translates to an average improvement in mortality, averaging across all ages, of 0:0099 2:34 ¼ 2:32% per year. 3. IMPROVING THE LC APPROACH: ESTIMATION This article suggests improvements to the LC method. Suggested improvements are the LC(smooth) model (2) and improving the estimation and forecasting basis. This section begins by examining potential shortcomings of the SVD estimation technique usually applied in the context of the LC model (1), and second suggests a least squares improvement. This least squares improvement is a first step towards likelihood based estimation as outlined in Section 5. 3.1. Features of the SVD Estimation Method In model (1), ai is estimated as the average, over the observed period, of the log-mortality rate at age i: abi yi , i ¼ 0; . . . ; p where yi is the mean of row i of Y. We shall show simple relationships for the single component SVD estimates of bi and at , namely corðbbi ; si Þ 1; corðb at ; yt Þ 1; ð4Þ where yt is the mean of column t of Y and si is the standard deviation of row i of Y and cor denotes correlation. Insight into the accuracy of (4) is gained from the two panels of Figure 3 which show, for the women’s mortality data, bbi against si for i ¼ 0; . . . ; 100 and b at (without adjustment) against yt for t ¼ 1; . . . ; 80. Both show a strong linear relationship justifying (4). Thus the SVD estimates reduce to, in essence, simple means and standard deviations. These estimates are insensitive to the more subtle aspects FIGURE 3 Plots of ðsi ; bbi Þ and ðyt ; b at Þ for women’s mortality data. 6 P. de Jong and L. Tickle of mortality trends and form a crude basis for mortality projection. This argues for more refined estimation and forecasting methods. To explain the approximations in (4), put M Y y1 ’ UDV 0 where UDV 0 is a one component singular value decomposition. Then bb ¼ U and b a ðb a1 ; . . . ; b an Þ0 ¼ VD are eigenvectors of MM 0 and M 0 M, respectively, corresponding to the largest eigenvalue, D2 . These eigenvectors maximize b0 MM 0 b and aM 0 Ma with respect to b and a, respectively, subject to appropriate normalization. Thus bb is the normalized linear combination of age-specific mortality which has maximum variance across the calendar years. Since M has mean zero along each row, diagonal entries of MM 0 are proportional to the estimated variances s2i . Component bbi tends to be large with si , leading to the first relationship in (4). Thus the age-response estimates bbi are essentially a measure of standard deviation in log-mortality for age i across time. For the second approximation in (4), the columns of M are not mean corrected. If m is the vector of column means then m ðy1 y; . . . ; yn yÞ0 ; a0 M 0 Ma ¼ a0 ðM 1m0 Þ0 ðM 1m0 Þa þ ðp þ 1Þða0 mÞ2 ; ð5Þ where y is the mean of the entries in Y. Maximizing the second expression with respect to the components of a yields the (unnormalized) eigenvector of M 0 M. Its components with large mt yt y are heavily represented, leading to the second approximation in (4). Thus b at is essentially the average log-mortality over all ages in calendar year t. 3.2. Least Squares Estimation of the LC Model One improvement to the ‘‘raw’’ implementation of the LC model as discussed in Section 2 is to integrate the estimation of the time series structure with the estimation of the age-related parameters. This section displays a least squares approach. This sets the stage for generalized and improved estimation methods outlined in subsequent sections. Consider a one component model consisting of a random walk with drift: Et yt ¼ a þ bat þ Et ; atþ1 ¼ d þ at þ kgt ; ð6Þ ð0; r2 IÞ gt Multiplying b by a constant and dividing at by the same constant leaves the model unchanged so that we assume b0 b ¼ 1. Replacing at by c þ at , t ¼ 1; . . . ; n and a by a cb leads to the same model, so that we assume a0 ¼ 0. k is a ‘‘signal-to-noise ratio’’ statistic. Extending Lee–Carter Mortality Forecasting 7 From (6): Eðyt ja0 Þ ¼ a þ bða0 þ dtÞ; EðDyt Þ ¼ db; ð7Þ where Dyt yt yt1 . Straightforward calculations show r2 fI þ k2 tbb0 g; t ¼ s; covðyt ; ys ja0 Þ ¼ 2 2 r k minðt; sÞbb0 ; t 6¼ s; 8 <r2 ð2I þ k2 bb0 Þ; t ¼ s; covðDyt ; Dys Þ ¼ r2 I; t ¼ s 1; : 0; jt sj > 1: ð8Þ ð9Þ Unbiased estimators of db and covðDyt Þ are c¼ db n 1 X 1 ðyn y1 Þ; Dyt ¼ n 1 t¼2 n1 n 1 X c c 0: ðDyt db dbÞðDy dbÞ t db n 1 t¼2 Using the normalization b0 b ¼ 1 yields the estimates qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi 1 b ðyn y1 Þ0 ðyn y1 Þ; d¼ n1 yn y1 bb ¼ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi : ðyn y1 Þ0 ðyn y1 Þ ð10Þ ð11Þ Furthermore, y a þ bfa0 þ dðn þ 1Þ=2g given bb, and hence0 if a0 is normalized such that a0 ¼ b dðn þ 1Þ=2, then ab ¼ y and b at ¼ bb ðyt yÞ are reasonable estimates of a and at . The normalization on a0 facilitates direct comparison to the estimates displayed in Section 2. From (8) we find ( ) 2 2 k r2 k2 0 c ¼ r2 bb bb0 : I þ ð12Þ covðdb dbÞ n1 n1 ðn 1Þ2 From (9), given b0 b ¼ 1, it follows that covðb0 Dyt Þ ¼ r2 ð2 þ k2 Þ and covðb0 Dyt ; b0 Dyt1 Þ ¼ r2 suggesting the moment estimates n 0 0 1 X ðbb Dyt b dÞðbb Dyt1 b dÞ; n 1 t¼2 ( ) Pn b 0 2 b 2 ð b Dy d Þ t t¼2 b k ¼ 2þ : ðn 1Þb r2 b r2 ¼ ð13Þ If these estimates are negative, the model appears inappropriate. 8 P. de Jong and L. Tickle 3.3. Least Squares Estimates for Women’s Mortality Data Figure 4 illustrates the use of the least squares method applied to women’s mortality data. The estimated base rates are, by construction, the same as those displayed in Figure 2. The estimated trend b at displayed in the bottom left panel is similar to the one estimated using the LC method. (The different normalization results in a difference of scale.) The response profile bb in the top right panel appears more regular than the LC estimate. However, it is quite jagged arguing for appropriate smoothing. The final panel shows fitted year 2000 log-mortalities and forecast log-mortalities at 10-year intervals from 2010 to 2040. These forecast rates also display a jaggedness which would not be expected of actual rates. Estimates are b d ¼ 0:220, b r ¼ 0:155 and b k ¼ 1:911. The standard deviation associated with the random walk b kb r ¼ 0:296 is almost twice that associated with each observed log-mortality. The least squares and LC estimates of the random walk are similar after allowing for scaling. This shows, from Section 3.1, that the least squares estimate of the random walk is essentially the scaled column means of Y. One suggestion for improvement is to regress yt on ð1; tÞ, leading to estimates of a and db. However, if the covariance matrix of FIGURE 4 Results from least squares analysis for women’s mortality data. Extending Lee–Carter Mortality Forecasting 9 yt , as implied by the random walk model, is factored in, then the regression leads to the same estimates displayed in (11). Further, it appears worthwhile to iterate the estimates, improving efficiency. At each iteration, estimates of b and k are used to define the estimate of covfvecðDYÞg as in (9) and covariances are used to improve estimates. A unified approach is discussed in Section 5. 4. THE LC(SMOOTH) MODEL The LC(smooth) model (2) builds in the expected smooth behavior of mortality by age. In practice X has fewer columns than rows, and hence a and b in (2) have few parameters as compared to a and b in the LC model (1). The effect of X is to impose smoothness and robustness. In contrast to (1), the effects of the at time series on each age are not independent across age but are constrained by the variables making up X. An example of X is with entry ði; jÞ as ði þ 1Þj1 , i ¼ 0; . . . ; p and j indicates the order of polynomial. Then X interpolates low order polynomials and at impacts mortality smoothly at each t across ages. A variant is when X contains splines or b-splines (De Boor, 1978), yielding polynomial smoothness across age with knots at critical ages corresponding to break points in the momentum of age-related mortality. 4.1. Least Squares Estimation of the LC(Smooth) Model To estimate the LC(smooth) model (2), a least squares estimate is obtained by transforming the model to a lower dimension based on X. The suggested transformation is based on X ¼ UDV 0 , the SVD of X, where V and D are square corresponding to the nonzero singular values of X. Multiplying the LC(smooth) model (2) by U 0 yields the reduced dimension LC model (1) yt ¼ a þ b at þ Et ; ð14Þ where yt ¼ U 0 yt , a U 0 Xa ¼ DV 0 a, b U 0 Xb ¼ DV 0 b, Et ¼ U 0 Et with covðEt Þ ¼ r2 I if covðEt Þ ¼ r2 I. The number of components in yt is much less than yt since X has fewer columns than rows. The least squares method of Section 3.2 is applied to yt ensuring smoothness and robustness in the age direction. Estimates of a and b are arrived at by multiplying the estimates of a and b by ðU 0 XÞ1 ¼ VD1 . Further, estimates of Xa and Xb are arrived at by multiplying the estimates of a and b by U. 10 P. de Jong and L. Tickle 4.2. Application of the LC(Smooth) Model to Women’s Mortality Data Figure 6 presents the results of fitting the LC(smooth) model (2) to the women’s mortality data of Figure 1 using the least squares method of Section 3.2 applied to (14). The matrix X is based on the b-splines displayed in Figure 5. Between knots at ages 0.5, 9.5, 19.5, 60.5, 90.5 and 105, log-mortality is assumed quadratic. At knots the quadratics join up in such a way that the first derivative is continuous but the second derivative is discontinuous. Knots correspond to apparent changes in the momentum of age-related mortality. At each age there are at most three nonzero splines, thus each row of X in (2) has at most three nonzero entries. The selected knots imply there are eight age parameters associated with each time series component. This is an improvement on the p þ 1 ¼ 101 parameters, for each time series component, implicit in the Lee–Carter model of Section 2. Figure 6 displays the fit to women’s mortality data. Both the base rates and the age response profile are smooth. The estimated historical trend is jagged, largely because the coefficients of the b-splines associated with the oldest ages are erratic. This suggests the need to factor in standard errors associated with different ages. FIGURE 5 b-splines used for LC(smooth) applied to women’s mortality data. Extending Lee–Carter Mortality Forecasting 11 FIGURE 6 Results from LC(smooth) least squares analysis for women’s mortality data. 4.3. Testing Model Adequacy Consider yt ¼ U 0 yt and N 0 yt where the columns of N span the null space of the columns of X. If (2) holds, each of the time series in yt is a common random walk plus noise. The time series in N 0 yt , provided covðEt Þ ¼ r2 I and N 0 N ¼ I, are zero mean noise because N 0 X ¼ 0. For example, serial correlation in N 0 yt indicates not all the time dependence in log-mortality is picked up through the smooth age dependent behavior modeled with X. The top left panel in Figure 7 plots the yt for women’s mortality data. The series in U 0 yt are standardized such that U 0 y1 ¼ 0 and each load negatively (as determined by least squares) on at . The increase of the series over time indicates mortality improvement at all ages, with lesser improvements experienced by b-splines associated with older ages. The top right panel shows the autocorrelation function of the series in yt up to lag 20. Five of the autocorrelation functions are consistent with that of an autoregressive process with a unit root and consistent with a random walk. The last two autocorrelation functions, corresponding to the oldest ages, are not consistent with a random walk specification. The partial autocorrelation functions plotted in the bottom left panel of Figure 7 also suggest AR(1) models. 12 P. de Jong and L. Tickle FIGURE 7 Time series properties of yt ¼ U 0 yt and N 0 yt . The bottom right panel indicates the average autocorrelation function of N 0 yt (middle line) with 95% confidence intervals. The average autocorrelation suggests that the series N 0 yt also have a time series structure. Thus the predictability in yt is only partly captured through the smooth age behavior modeled by the X matrix. 5. MAXIMUM LIKELIHOOD ESTIMATION OF THE LC(SMOOTH) MODEL USING KALMAN FILTERING Maximum likelihood estimates of the LC(smooth) model (2) can be derived using Kalman filtering and smoothing (Harvey, 1989) and assuming an appropriate time series model for at . Consider a random walk with drift: atþ1 ¼ d þ at þ kgt and disturbance terms normally distributed. Then the procedure consists in: 1. Evaluating the normal based likelihood for different values of parameters b and k using Kalman filtering and determining the maximum likelihood values be and e k; 2. Given be and e k, determining the maximum likelihood values of a, d and r, denoted ae, e d and e r, again using Kalman filtering; Extending Lee–Carter Mortality Forecasting 13 3. Given the maximum likelihood estimates of the parameters, using Kalman and smoothing filters to determine e at Eðat jy1 ; . . . ; yn Þ; Xðe a þ bee at Þ ¼ EðXa þ Xbat Þ; t ¼ 1; . . . ; n þ s; ð15Þ and associated error variances. Here s > 0 indicates the appropriate lead time for forecasting. Kalman filtering can use either (2) or (14). The latter system is of lower dimension, but is less efficient because the data Y ðy1 ; . . . ; yn Þ are summarized into fewer observations U 0 Y ¼ ðy1 ; . . . ; yn Þ. The numerical maximization in step 1 uses standard numerical routines, such as the simplex method (Nelder and Mead, 1965) starting from the least squares estimates discussed in Section 4.1. Kalman filtering and smoothing can be applied whenever the time series model for at is of the generic ‘‘state space’’ form, such as the random walk model atþ1 ¼ d þ at þ kgt , ARIMA (Box et al., 1994) or structural models (Harvey, 1989). 5.1. Application to Women’s Mortality Data Figure 8 presents the maximum likelihood estimates of model (2) combined with a random walk with drift for at . The top left panel shows the estimated (mle and least squares) and actual 2000 log-mortality rates (jagged line). The top right panel shows the estimated age response patterns corresponding to mle and least squares. These are almost identical. The bottom left panel shows the estimate of at with 95% confidence intervals obtained from the smoothing filter companion to the Kalman filter. The estimate is smoother than the one obtained from least squares. The bottom right panel displays the latest observed log-mortalities (jagged line) and forecast log-mortalities for the year 2050, together with 95% confidence intervals. The interval is for the expected value of log mortality in 2050 and incorporates the estimation uncertainty associated with a and d and the process uncertainty associated with the random walk at . Not incorporated in the interval is the estimation uncertainty associated with b and r2 . The detailed confidence intervals on both historical estimates of at and projected future log-mortalities are an advantage of the utility of the current maximum likelihood method. Table 1 compares estimates from least squares, smooth least squares and mle methods. The expected improvement per year is estimated to be around 0:22 X be by each method, where X be is plotted in 14 P. de Jong and L. Tickle FIGURE 8 Results from maximum likelihood estimation analysis for women’s mortality data. the top right panel of Figure 8. At age 10 for example, the improvement is estimated to be about 0:22 0:15 ¼ 3:3% per year, while at age 70 it is about 0:22 0:05 ¼ 1:1% per year. These estimates assume that the fitted model is an appropriate guide to the future. 6. EXTENSIONS OF THE LC(SMOOTH) MODEL LC(smooth) model (2) reduces to the LC model if X ¼ I. Further specializations and extensions are discussed in the following subsections. TABLE 1 Comparison of Estimates Method Least squares Smooth least squares mle using yt d r k 0.220 0.218 0.215 0.155 0.148 0.359 1.911 1.983 0.661 Extending Lee–Carter Mortality Forecasting 15 6.1. Evolving Mortality Trend In the random walk with drift model, the approximate annual change d in mortality is fixed, independent of t. Booth et al. (2002) noted that application of Lee–Carter using a random walk with drift model was compromised with Australian data by significant departures from fixed d. They addressed this by determining an optimal fitting period. More generally, mortality trends that vary over time can be modeled by atþ1 1 1 at k1 0 g1t ¼ þ : ð16Þ 0 k2 dtþ1 dt g2t 0 1 k2 ¼ 0 corresponds to constant mortality improvement. The ‘‘slope’’ noise g2t and hence k2 > 0 ensures that most recent data prevails in determining mortality trends (Harvey, 1989, p. 47). 6.2. More Detailed Time Series Modeling An example is to add an AR(1) component to the random walk: g1t d 1 0 k1 0 atþ1 ¼ þ a þ : ð17Þ 0 k2 l 0 / t g2t In this case, b is a matrix with two columns indicating the log-mortality response profiles to the random walk and AR(1) components. 6.3. Differential Measurement Error Variances Variability in log-mortality rates is expected to vary with age. This is rendered by replacing Et in (2) by GEt where G 6¼ I. In the estimation, ages with more variable rates weigh less in trends. Wilmoth (1993) imputes variances according to Poisson assumptions. 6.4. Constraining Fitted Rates The fitted rates can be constrained so that, for example, the sum of the observed log rates is equal to the sum of the fitted log rates at each t. For example define M I n1 ii0 where i ¼ ð1; . . . ; 1Þ0 . Then i0 M ¼ 0 and if yt ¼ Xa þ Xbat þ MEt ; ð18Þ then i0 yt ¼ i0 ðXa þ Xbat Þ. A fit based on (18) leads to fitted rates at such that i0 yt ¼ i0 yet and hence the fitted ‘‘jump off’’ yet X ae þ X bee 16 P. de Jong and L. Tickle rates yen X ae þ X bee an are, on average, equal to the average of the latest actual rates yn . Smaller groups of fitted rates can also be constrained, by replacing M in (18) by a block diagonal matrix with smaller versions of M on each block. These constraints can also be imposed on the transformed system yt ¼ a þ b þ MEt where sums of fitted rates in the transformed system coincide with sums of components of yt . 7. SEPARATE TRENDS The LC(smooth) model states that a single common random walk drives the behavior over time of all age-specific mortality rates. This can be relaxed in favor of several random walks allowing, for example, a behavior varying with age: yt ¼ Xa þ Xat þ Et ; atþ1 ¼ d þ at þ Hgt ð19Þ where at is a vector time series. The scaled versions of a single random walk bat in LC(smooth) (2) is replaced by a vector of random walks at . Model (19) is a special case of the LC(smooth) model (2) by constraining d and H in (19) to be scalar multiples of a common vector. Equations (19) were considered in De Jong and Boyle (1983), who studied the mortality experience associated with a small pension fund. In their model, the considerable variations in exposure by age and time were modeled by heteroskedastic error terms Et . With large sample size, as in for example the women’s mortality data, exposures are uniformly large and death probabilities are small except for the oldest ages, so that covðEt Þ ¼ r2 I is a reasonable assumption. Multiplying the first equation in (19) by U 0 , where X ¼ UDV 0 is the SVD of X, yields the lower order system yt ¼ a þ at þ Et ; atþ1 ¼ d þ at þ H gt ; ð20Þ where a ¼ DV 0 a, at DV 0 at , Et ¼ U 0 Et , d ¼ DV 0 d and H ¼ DV 0 H. Each random walk component has its own error term and if H ¼ diagðk Þ, then atþ1 ¼ d þ at þ diagðk Þgt ; ð21Þ where gt is a vector of disturbance terms, Ua ¼ Xa and Uat ¼ Xat . The system can be estimated using maximum likelihood and the Kalman filter. Again, estimation from (20) rather than from (19) is less efficient because the data Y ðy1 ; . . . ; yn Þ are summarized into fewer observations Y U 0 Y. r2 and the entries of H of (20) are unknown. The mle of k yields the mle’s of a , d and r2 . As Xa ¼ Ua and Extending Lee–Carter Mortality Forecasting 17 Xat ¼ Uat , the fitted values of yt are determined directly from the estimates. Forecast log-mortality rates at time t ¼ n þ m are Uðe a þ e an þ me d Þ UU 0 yn þ mU e d yn þ mU e d : ð22Þ The latest observed rates yn are used as jump off rates for the random walk projections rather than the latest smoothed rates Uðe a þ e an Þ. 8. CONCLUSION We have discussed the Lee–Carter framework of mortality forecasting and suggested improvements. The suggested improvements are based on standard time series methods. The improvements integrate estimation and forecasting. Additionally, the improved framework is amenable to extension. 9. ACKNOWLEDGEMENTS Our thanks to Len Smith for providing data from the Australian Demographic DataBank produced by the Australian Centre for Population Research. REFERENCES Bell, W. (1992). Arima and principal component models in forecasting age-specific fertility. In N. Keilman and H. Cruijsen (Eds.), National Population Forecasting in Industrialized Countries. Amsterdam: Swets and Zeitlinger, pp. 159–177. Bell, W. (1997). Comparing and assessing time series methods for forecasting agespecific fertility and mortality rates. Journal of Official Statistics 13: 279–303. Bell, W. and Monsell, B. (1991). Using principal components in time series modeling and forecasting age-specific mortality rates. In Proceedings of the American Statistical Association, Social Statistics Section, Alexandria, VA, USA, pp. 154–159. Booth, H., Maindonald, J., and Smith, L. (2002). Applying Lee–Carter under conditions of variable mortality decline. Population Studies 56: 325–336. Box, G.E.P., Jenkins, G.M., and Reinsel, G.C. (1994). Time Series Analysis: Forecasting and Control (3rd ed.). New Jersey: Prentice-Hall, Englewood Cliffs. Bozik, J. and Bell, W. (1987). Forecasting age-specific fertility using principal components. In Proceedings of the American Statistical Association, Social Statistics Section, pp. 396–401. Currie, I., Durban, M., and Eilers, P. (2002). Using p-splines to smooth two-dimensional Poisson data. In Proceedings of the 17th International Workshop on Statistical Modelling, Crete, pp. 127–134. De Boor, C. (1978). A Practical Guide to Splines. New York: Springer. De Jong, P. and Boyle, P. (1983). Monitoring mortality: A state-space approach. Journal of Econometrics 23: 131–146. Girosi, F. and King, G. (2004). Demographic Forecasting. Forthcoming: available at http:==gking.harvard.edu=files=smooth.pdf. 18 P. de Jong and L. Tickle Harvey, A.C. (1989). Forecasting, Structural Time Series Models and the Kalman Filter. Cambridge: Cambridge University Press, UK. Lee, R.D. and Carter, L.W. (1992). Modeling and forecasting U.S. mortality (with discussion). Journal of the American Statistical Association 87(419): 659–675. Lee, R.D. and Miller, T. (2001). Evaluating the performance of the Lee–Carter method for forecasting mortality. Demography 38: 537–549. Nelder, J. and Mead, R. (1965). A simplex method for function minimization. The Computer Journal 7: 308–313. Wilmoth, J.R. (1993). Computational methods for fitting and extrapolating the Lee– Carter model of mortality change. Technical report, Department of Demography, Berkeley: University of California.