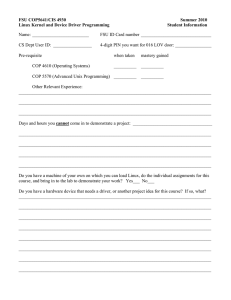
5.7.26.11.2 Centre of pressure calculations Centre of pressure (CoP) calculations were made from the output from two force plates inset in the laboratory floor. Figure 5.18 demonstrates the x, y and z axes of the force plates. Appendix 1 Figure 6.18 Force plate axes Centre of pressure calculations 5.7.26.11.2 Centre of pressure calculations Centre of pressure (CoP) calculations were made from the output from two force Centre of pressure (CoP) calculations were made from the output from two force plates inset in the plates inset in the laboratory floor. The figure below demonstrates the x, y and z floor. Figure 5.18Yellow demonstrates x, y and z axesthe of the force plates. axeslaboratory of the force plates. arrowtherepresents x-axis; green arrow, the y-axis; and orange arrow, the z-axis. Figure 6.18 Force plate axes Yellow arrow represents the x-axis; green arrow, the y-axis; and orange arrow, the z-axis. The x-coordinate of the CoP was calculated under each limb from the moments and forces produced Yellow arrow represents the x-axis; green arrow, the y-axis; and orange byThe eachx-coordinate plate with arrow, respect toz-axis. the origin the laboratory space, follows: of the the CoP was of calculated under eachaslimb from the moments and forces produced by each plate with respect to the origin of the laboratory space, as The x-coordinate of the CoP was calculated under each limb from the moments and forces produced follows: by each plate with respect to the origin of the laboratory space, as follows: −𝑀 _ + 𝑝𝑙𝑎𝑡𝑒 𝑜𝑟𝑖𝑔𝑖𝑛 𝐹 _ 𝑥 _ = 𝑥 𝑥 _ _== 𝑥 _ = −𝑀 _ −𝑀 _ + 𝑝𝑙𝑎𝑡𝑒 𝑜𝑟𝑖𝑔𝑖𝑛 𝐹 _ + 𝑝𝑙𝑎𝑡𝑒 𝑜𝑟𝑖𝑔𝑖𝑛 𝐹 _ −𝑀 _ + 𝑝𝑙𝑎𝑡𝑒 𝑜𝑟𝑖𝑔𝑖𝑛 𝐹 _ where of the CoPCoP under the left right at time i, and where𝑥 xCoPl_i, arex-x-coordinates coordinates of the under theand left andfeet right feetpoint at time _ , 𝑥xCoPr_i _ are , Fzl_i, Fzr_icomponents are directional the acting moments yr_idirectional 𝑀point 𝑀 i, _ and ,𝑥𝐹 _M , 𝐹yl_i, M are of thecomponents moments and of forces on theand body _ , where _ , 𝑥 _ _ are x- coordinates of the CoP under the left and right feet at time point i, and forces acting on the body from each force plate. These coordinates are expressed 𝑀 _ ,𝑀 are coordinates directional components of the moments andthe actingcoordinates on the body of the from each forceplate. relative _ , 𝐹 _ , 𝐹These relative to the global_ coordinates ofare theexpressed laboratory spaceto byforces a global translation between each These coordinates areorigin expressed to the global coordinates the from origin offorceplate. the force plate and the of relative the laboratory (plate originofxl,the plate originxr) . 144 144 The x-coordinate of the CoP of the whole body was calculated by multiplying the xcoordinate of the CoP for each limb by the fraction of the total vertical force (Fz) acting through that limb, and adding the two terms together, as follows: x-coordinate of the CoP of the whole body was calculated by multiplying the x-coordinate of the the twoThe terms together, as follows: for each limb by the of the body total vertical force (Fz)by acting through the thatx-coordinate limb, and adding The CoP x-coordinate of the CoPfraction of the whole was calculated multiplying of the as follows: CoPthe fortwo eachterms limbtogether, by the fraction of the total vertical force (Fz) acting through that limb, and adding the two terms together, as follows: 𝑥 = 𝑥 _ 𝑥 𝑥 where 𝑥 _ _ _ _ = 𝑥 ∗ ∗ _ = 𝑥 _ 𝐹 _ 𝐹 _ 𝐹+ 𝐹 _ _ 𝐹 + 𝐹 _ 𝐹 _ ∗ 𝐹 _ + 𝐹 +𝑥 +𝑥 _ +𝑥 _ 𝐹 _ 𝐹𝐹 _ + 𝐹 ∗ _ _ _ ∗ _ 𝐹 _ ∗ 𝐹 _ + 𝐹 𝐹 _ + 𝐹 is the x-coordinate of the CoP of the whole body. _ _ _ where 𝑥 x_CoP_i is the x-coordinate of theofCoP the whole where is the x-coordinate theofCoP of thebody. whole body. where 𝑥 _ is the x-coordinate of the of CoPthe of theroot wholemean body. squared error of the centre of 5.7.2.16.11.2.1 5.7.2.16.11.2.1 Calculation Calculation of the root mean squared error of the centre of Calculation of the root mean squared error of the(CoP centre of pressure in the antero-posterior direction (CoP pressure in the antero-posterior direction ) AP) in the anteroRMSE RMSE APpressure posterior direction (CoP ) RMSE AP of the root mean squared error of the centre of 5.7.2.16.11.2.1 Calculation The root mean squared error of the CoP in the antero-posterior direction (x-direction) is given by: The root mean squaredinerror of the CoP in the antero-posterior direction (x-direction) is given by: the antero-posterior (CoP RMSE AP) Thepressure root mean squared error of thedirection CoP in the antero-posterior direction (x- direction) is given by: The root mean squared error of the CoP in the antero-posterior direction (x-direction) is given by: 𝐶𝑜𝑃 𝐶𝑜𝑃 𝑥 = _ _ 𝑥 = _ 𝐶𝑜𝑃 𝑥 = _ _ −𝑥 _ _𝑁 − 𝑥 𝑁 −𝑥 𝑁 _ _ where 𝑥 _ is the mean position of the x-coordinate of the CoP, and N is the number of time points in the trial. where 𝑥 _ is the mean position of the x-coordinate of the CoP, and N is the number of time points where is the meanofposition of the x-coordinate of Nthe CoP, and N is the where 𝑥 _ isxCoP_i the mean position the x-coordinate of the CoP, and is the number of time points in the trial. 5.7.2.26.11.2.2 Calculation of centre of pressure velocity in the antero-posterior number of time points in the trial. in the trial. direction (CoP VEL AP) 5.7.2.26.11.2.2 of centre ofdirection pressure velocity in the The mean velocity ofCalculation the CoP in the antero-posterior (x-direction) is given by: antero-posterior 5.7.2.26.11.2.2 Calculation of centre of pressure velocity in the antero-posterior Calculation of centre of pressure velocity in the antero-posterior direction (CoPVEL direction (CoP VEL AP) AP) direction (CoP VEL AP) 𝑥 direction − 𝑥 _(x-direction) The The mean velocity the antero-posterior (x-direction) is given The meanofvelocity of in the CoP in the antero-posterior direction (x-direction) given _ direction mean velocity of theCoP CoP inthe the antero-posterior is given by: isby: by: 𝐶𝑜𝑃 _ = where fs is the data sampling𝐶𝑜𝑃 frequency. = _ 𝐶𝑜𝑃 _ = ∗𝑓 𝑁 𝑥𝑥 𝑥 _ _− − 145 where fs is the data sampling frequency. fs is the data sampling frequency. where fs iswhere the data sampling frequency. 145 145 𝑥_ 𝑁𝑁 _ ∗ 𝑓∗ 𝑓