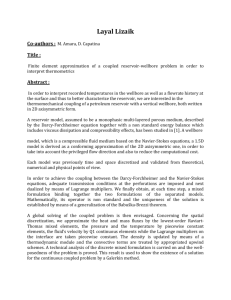
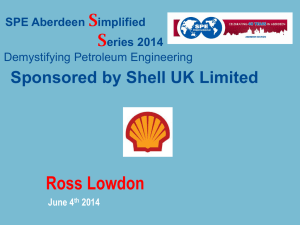
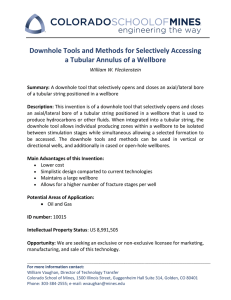
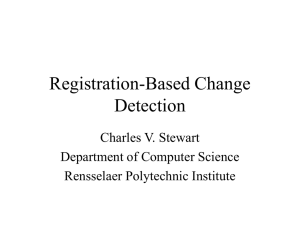
PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 Stage: Page: 1 Total Pages: 10 Analysis and Quantification of Wellbore Tortuosity Jon Bang, Onyemelem Jegbefume, Adrián Ledroz, and John Weston, Gyrodata Incorporated; and Jay Thompson, SandRidge Energy Summary Small-scale wellbore tortuosity—variations in attitude on a length scale smaller than standard survey intervals of 30 m (100 ft)—is generally neglected because of its small effect on the final position of the well and its unclear relation to traditional dogleg severity (DLS). However, it is well-known that such tortuosity may have significant influence on the drilling process and on drilling efficiency. Furthermore, it is a crucial factor for the design and installation of completions and production equipment, because a highly tortuous wellbore section, depending on borehole diameter and tortuosity amplitude and along-hole distribution, may exert strong bending forces on such equipment, or high friction on moving parts. This paper describes a novel methodology for analyzing the tortuosity of openhole wellbores, casing, drillstring, and production tubing. Several related tortuosity parameters are described, and examples of application to field data are included. The methods use high-resolution survey data [measured depth (MD), inclination, and azimuth], which may, in principle, originate from any surveying tool or service capable of providing such data. The methodology requires input data from a single survey only. On the basis of a user-defined length as single external parameter, tortuosity can be analyzed on any length scale greater than approximately 10 times the input survey-data interval, and with a maximum resolution equaling twice the data interval. The processed parameters include relative elongation of a tortuous section compared with a straight-line section, transverse displacements from the straight line, and maximum available diameter for a downhole device caused by the small-scale bendings of the section. The results can be displayed as graphs vs. MD, or as 3Drendered views of the actual wellbore or tubing shape. Results from various field cases are included, in which the tortuosity analysis was applied to high-resolution continuous gyro survey data collected in cased wellbores. In all the field cases, the novel methods revealed sections of considerable tortuosity that were either unnoticed, or located with unacceptably low accuracy, by conventional methods. These results led to re-evaluation of the planned locations for completion and production equipment. The characterization of the wellbore in terms of tortuosity on various length scales may be of crucial importance for the functionality and lifetime of permanently installed equipment. For example, identification of highly tortuous sections will aid the placement of rod-guide wear sleeves, increasing the rod and casing life and reducing the workover frequency. Another application is the identification of low-tortuosity sections in which downhole pumps or other equipment will not be subject to excess bending. In addition, the tortuosity results may help evaluate the drilling equipment and the drilling process. Introduction Definition of Tortuosity. Gaynor et al. (2001) defines wellbore tortuosity as “the amount by which the wellbore deviates from the planned trajectory.” Although this definition may be useful in many applications, we find it somewhat narrow, because it limits the evaluation of tortuosity to a comparison between the outcomes of two well-construction phases: planning and drilling (including surveying). It should be emphasized that tortuosity is purely a geometric property of the wellbore. Thus, the process that created the tortuosity (drilling) is subordinate to this, and the reference should be more basic than a planned trajectory. This leads us to propose the following definition, which we will use throughout this paper: “Tortuosity is any deviation from a straight line.” This definition can be applied in two or three dimensions; furthermore, it implies that tortuosity may exist on any length scale, as illustrated in Fig. 1. Why Analyze Tortuosity? Small-scale tortuosity [i.e., tortuosity occurring on intervals significantly shorter than a drillstring stand (30 m)] has been difficult to quantify because, in general, high-resolution data are not collected in traditional surveys. Nevertheless, such tortuosity is recognized as an important factor in the drilling process (Chen et al. 2002; Samuel et al. 2005; Mason and Chen 2006). High levels of tortuosity may imply significantly increased friction factors and increased torque-and-drag values (Skillingstad 2000) and excessive casing wear (Samuel and Gao 2013). In severe cases, this may lead to stuck pipe or limit the distance of extended-reach-drilling operations (Stuart et al. 2003). To analyze and optimize the drilling process, advanced computer models have been developed, which take into account the interactions between bottomhole assembly (BHA), drillstring dynamics, fluid and formation properties, and wellbore geometry (Liu et al. 2004; Menand et al. 2009; Marck et al. 2014). Such models may predict the resulting small-scale tortuosity for a particular drilling scenario (Marck and Detournay 2015), or they use tortuosity as one of many input parameters (see the subsection on DLS). Tortuosity may also affect the completion and production phases of a well. The large-scale wellbore curvature is normally designed for problem-free transportation and installation of downhole devices (Reid et al. 2013). However, unforeseen and possibly undetected small-scale tortuosity may cause significant reductions in the effective inner diameter of the wellbore (cased or openhole). This may lead to stuck equipment, or bending moments exceeding the manufacturer’s specifications, with reduced functionality or lifetime as potential consequences. A concrete example is the use of artificial-lift methods for the extraction of oil with a rod-activated pump. This operation relies on low friction between the rod and the tubing wall; however, severe wear may result from sharp bends and other directional changes in the wellbore profile (Matthews and Dunn 1993). The rod and tubing wear can be reduced significantly by positioning rod guides at the most effective locations along the wellbore (i.e., typically, at highly tortuous sections). It is therefore crucial to identify these sections and to analyze the wellbore geometry of such regions in detail. Because the tortuosity-related problems in the completion or production phases are caused by the actual geometry of the drilled wellbore, they can be addressed properly only through case studies involving survey data from the actual well. To our knowledge, no method for such analysis was demonstrated to date. C 2016 Society of Petroleum Engineers Copyright V This paper (SPE 173103) was accepted for presentation at the SPE/IADC Drilling Conference and Exhibition, London, 17–19 March 2015, and revised for publication. Original manuscript received for review 21 November 2014. Revised manuscript received for review 11 June 2015. Paper peer approved 6 September 2015. DLS. First, we need to warn against confusing the tortuosity phenomenon itself, as defined previously or by similar definitions, with parameters used for characterization of the phenomenon. 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 1 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 Stage: Page: 2 Total Pages: 10 92 Large scale (wellbore) 100–1000 m Medium scale (survey interval) 10–100 m Small scale 1–10 m Inclination (degrees) HRCG MWD High-Resolution Survey Data. The tortuosity analysis demonstrated in this paper was applied to real continuous gyro survey data, sampled at intervals of typically 0.3 to 1 m (1 to 3 ft). However, the methodology itself does not require any specific tool or service. Any quality-checked survey data set with sufficiently high resolution can be used as input, from measurement while drilling (MWD) gyro, inertial or other tools. High-resolution data are not usually collected in standard surveys, because they are not 2 91 90.5 90 Fig. 1—Wellbore tortuosity may occur on any length scale, here exemplified by wellbore scale (left), survey scale (middle), and subsurvey scale (right). Large-scale tortuosity corresponds to planned wellbore curvature. 89.5 1100 1150 1200 1250 1300 1350 1400 1450 1500 1550 1600 MD (m) (a) 15 HRCG MWD DLS (degrees/30 m) Tortuosity can be described theoretically as periodic or statistical fluctuations superimposed on a smooth wellbore trajectory (Sugiura and Jones 2008; Samuel and Liu 2009). More important in our context are tortuosity parameters derived from survey data. Commonly used parameters are the DLS and its inverse, the radius of curvature (Sawaryn and Thorogood 2005). DLS is defined as the angular change in wellbore direction over a certain MD interval, divided by the interval (the course length). It is usually expressed in units of (degrees/100 ft) or (degrees/30 m). Survey-derived DLS, and more sophisticated parameters that are derived from DLS, are widely used in the drilling-optimization computer models mentioned previously (Samuel and Liu 2009; Brands and Lowdon 2012; Mitchell et al. 2015). However, it has been realized that dogleg parameters alone are difficult to use as reliable tortuosity indicators (Matthews and Dunn 1993; Oag and Williams 2000; Brands and Lowdon 2012). In particular, Matthews and Dunn (1993) pointed out that “… dogleg severity values provide a measure of only absolute curvature …”, implying that important information on the curvature’s orientation in 3D space is not conveyed by the dogleg parameter alone. Another fundamental problem is the noisy character of DLS for short course lengths. Surveyed DLS is traditionally based on directional data at MD intervals corresponding to one drill stand (30 m) or one individual section (10 m). However, attempts to evaluate DLS at shorter intervals (down to 1 m or lower) show that it becomes unstable as the interval is decreased. An example is shown in Fig. 2. This effect was also observed by Sugiura and Jones (2008) and by Brands and Lowdon (2012); the latter authors compare DLS curves over course lengths of 3 and 30 m and conclude: “Although it is possible to obtain survey data in shorter (1–3 m) intervals today with continuous MWD surveys, it is difficult for engineers to interpret the presented hole curvature (DLS). The reported hole curvature can vary significantly on listings of the same borehole depending on the reported survey interval.” The noise is an intrinsic consequence of the DLS algorithm: On the basis of the directions at the wellbore section’s endpoints only, the direction difference may change significantly when calculated over a slightly different length, and this change is amplified when divided by a short course length. This contradicts the behavior that should be expected by tortuosity as a physical phenomenon—namely, a smooth variation with length scale. To overcome these limitations of DLS, this paper presents new parameters for characterizing tortuosity—in particular, smallscale tortuosity. 91.5 10 5 0 1100 1150 1200 1250 1300 1350 1400 1450 1500 1550 1600 MD (m) (b) Fig. 2—(a) Inclination data from a conventional MWD survey with resolution of 10 to 30 m (red curve), and a high-resolution continuous gyro (HRCG) survey with resolution 0.3 m (black curve). (b) DLS on the basis of inclination and azimuth data from the same two surveys. needed for calculation of the wellbore position. However, high-resolution surveys with continuous MWD or continuous gyro instruments were run for various reasons, such as improved wellbore positioning (Stockhausen and Lesso 2003), formation evaluation (Bordakov et al. 2009), drilling-performance evaluation (Sugiura et al. 2013), and evaluation of load-induced drillstring buckling (Menand et al. 2006; Weltzin et al. 2009; Mitchell and Weltzin 2011). In the latter of these applications, the development of buckling was evaluated by comparing different surveys, not by analyzing a single survey, which is central to the methods described here. The high-resolution data presented in the papers mentioned previously and in similar papers are typically limited to inclination and azimuth data, and no attempts are made to process tortuosity characteristics from these data. To the authors’ knowledge, no comprehensive method for tortuosity analysis on the basis of high-resolution survey data was ever published. Theory Preprocessing. Raw Data Set. One basic implication of the definition of tortuosity used here is that tortuosity can, in principle, exist on any length scale. Small-scale tortuosity (on a length scale smaller than traditional survey intervals of 10 to 30 m MD) will be the primary subject of the analysis presented in this paper, although the methods can be applied on any length scale, as long as a sufficient number of data points is available. It is assumed that the data are provided by a high-resolution wellbore survey [i.e., at intervals of typically 0.3 to 1 m (1 to 3 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 W Stage: Page: 3 Total Pages: 10 Large-scale T Small-scale T S Survey stations L Fitted straight line L Fig. 3—Establishing a local reference line for the wellbore trajectory: An analysis window W of constant MD length is moved stepwise down the wellbore, and at each location of W, a straight line is fitted through the position coordinates of the survey stations covered by W. The illustration shows a wellbore section with large-scale tortuosity on the left-hand side, and small-scale tortuosity to the right. The well path will, in general, be 3D, and the straight lines are fitted in 3D space. ft)]. MD, inclination, and azimuth values are collected at these intervals along the wellbore section of interest. It is further assumed that the data have passed standard quality-control procedures. No correction is needed for the possible nonuniformity of the MD data. The survey data are converted into position increments dNr,j (north), dEr,j (east), dVr,j (vertical) at each measurement station j, where the subscript r indicates that these are raw data (i.e., input data to the analysis). Conversion to position is performed by the tangential method (API D20 1985). This method is not recommended for normal survey intervals (10 to 30 m) because of poor accuracy; however, for the short-interval data, initial comparison with other methods showed that the conversion method has no significant effect on the tortuosity results. The positions Nr,j, Er,j, Vr,j obtained by cumulating the increments are termed “the raw data set.” It is assumed that these data constitute a true representation of the wellbore trajectory. No other data, in particular, no knowledge of the drilling process, are needed in the analysis. Local Reference Line. An analysis window W is defined along the wellbore (Fig. 3), with an MD length of typically LW 10 to 30 m (30 to 100 ft). As the window is subsequently shifted along the wellbore, its length is kept constant, except for negligible adjustments so that the window always begins and ends on a survey station. The window typically covers 30 to 100 stations. A straight line is fitted through the position coordinates of these stations, by a least-squares fit in three dimensions, with equal freedom in all directions. Mathematically, this is equivalent to a principal-component analysis (Davis 1986). The straight line will pass through the point given by the arithmetic means N0, E0, V0 of the coordinates: 1 XMW N ; N0 ¼ j¼1 r; j MW 1 XMW V ; V0 ¼ j¼1 r; j MW 1 XMW E0 ¼ E ; j¼1 r; j MW ð1Þ where MW is the number of stations covered by the window W. The direction of the line is given by the eigenvector that corresponds to the largest eigenvalue of the matrix P¼ 2 XMW XMW ðNr; j N0 Þ2 ðNr;j N0 ÞðEr;j E0 Þ j¼1 j¼1 6X XMW 6 MW 6 ðE E ÞðN N Þ ðEr;j E0 Þ2 r;j 0 r;j 0 6 j¼1 4 Xj¼1 XMW MW ðVr;j V0 ÞðNr;j N0 Þ ðV V0 ÞðEr;j E0 Þ j¼1 j¼1 r;j S XMW ðNr;j N0 ÞðVr;j V0 Þ 3 7 7 ðEr;j E0 ÞðVr;j V0 Þ 7 7: 5 XMW 2 ðV V0 Þ j¼1 r;j j¼1 XMW j¼1 ð2Þ The straight line is used as a reference in the further processing. The window W is shifted along the wellbore, and the previous processing is performed at each location of the window. From one location to the next, W is shifted by the average survey interval. This implies that, typically, one survey station is discarded at one end of the window, whereas a new station is included at the other end. Fig. 4—Tortuosity T can be defined by the ratio between actual (along wellbore) length S and straight-line length L. The dashed vertical line approximately separates between a region with large-scale tortuosity (left) and a region with small-scale tortuosity (right). The well path will, in general, be 3D, and S and L are calculated in 3D space. Smoothed Data Set. On the basis of the straight reference lines produced at each location of the window W, we may derive a new wellbore trajectory where the small-scale tortuosity is suppressed, hence, the term “smoothed data set”. The basic criterion for one point to belong to this data set is that it lies close to the centerpoint of the raw data subset used to establish the respective reference line. The obvious choice is the “center of gravity” point (N0 E0 V0) (Eq. 1) for each window location, although other definitions may be used. The set of smoothed data points will trace out the overall (i.e., large-scale) shape of the wellbore, and this set will be almost insensitive to single raw data outliers. By their very nature as “outliers,” such points should be considered as constituting the small-scale tortuosity. The length scale indicating the transition from large scale to small scale, and the degree of suppression of small-scale tortuosity, will be closely related to the length of the W window. Similar to the raw data set, the smoothed data set can be subject to the processing of the tortuosity parameter T (below). This is not pursued further in this paper. The possible benefits of processing both the raw and the smoothed data sets are outlined in the Discussion section. Quantification of Tortuosity. Tortuosity Parameter. Tortuosity, described as “a factor that accounts for effective elongation of fluid paths”, has long been an important parameter in the study of flow in porous media in petrophysics (Matyka and Koza 2012). In its most basic form, tortuosity T was initially described by the pioneers Kozeny and Carman (hence, the subscript KC) by the formula TKC ¼ Spore =Lslab ; . . . . . . . . . . . . . . . . . . . . . . . . . . ð3Þ where Spore is the distance along a flowline (following a pore) through a porous slab of thickness Lslab. More sophisticated formulas were later developed to account for the complexities of the flow problem. However, Eq. 3 is very appealing in the context of this study because of the well-defined geometry of the wellbore, and the type of data available. It follows from Eq. 3 that TKC is always greater than or equal to unity, and attains the minimum value of unity for a perfectly straight path. In the wellbore situation, the analyzed section will normally be very close to straight, and initial testing showed that TKC from Eq. 3 typically lies in the range from 1.000 to 1.001. Thus, to make it easier to visualize the results, we modified the equation and define our tortuosity parameter T as T ¼ ðS=LÞ 1 ¼ ðS LÞ=L; . . . . . . . . . . . . . . . . . . . . . . . . . . ð4Þ where S is the along-hole length of the wellbore section being studied and L is the straight-line distance between the ends of the section. T is thus the relative elongation of S with respect to L. The situation is illustrated in Fig. 4. A nice feature of the modified definition is the favorable correspondence between the verbal expressions “no tortuosity” or “absence of tortuosity,” meaning a perfectly straight section, and the numeric value T ¼ 0. 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 3 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 High Side Displacement (in.) 2 1.5 1 0.5 0 –0.5 –1 –1.5 –1 –0.5 0 0.5 1 1.5 Lateral Displacement (in.) (a) 6 High Side (in.) 4 2 0 –2 6380 6360 –4 6340 –6 4 6320 2 0 –2 Lateral (in.) (b) –4 MD (ft) 6300 Fig. 5—Transverse-displacement vectors calculated at 1-ft intervals over a 100-ft wellbore section, from real survey data (cased hole). (a) Endpoints of displacement vectors plotted in the plane transverse to the wellbore [reference line 5 z-axis, perpendicular to the paper plane through (0,0)]. The endpoints indicate a certain amount of wellbore spiraling. (b) The same displacement vectors show the real shape of a wellbore or casing when applied to a 3D model. The color indicates the effective diameter value (refer to Fig. 8). Both S and L are calculated in 3D space, and are easily determined from wellbore-position coordinates [the raw data set (Nr,j, Er,j, Vr,j), or the smoothed data set]. The steps necessary to determine T are as follows: 1. Select S0 as the nominal length scale at which the analysis is wanted. S0 might be the length of one particular downhole device. 2. Apply an analysis window of length S0 at a certain well depth. 3. Adjust S0 slightly so that the window starts and ends on two survey stations. 4. Calculate S as the sum of all intermediate survey interval lengths between each pair of adjacent survey stations. For raw data, this sum is equivalent to the original MD interval between the end stations. For smoothed data, each intermediate interval must be calculated. 5. Calculate L as the straight-line distance between the start and end stations. 4 Stage: Page: 4 Total Pages: 10 6. Calculate T according to Eq. 4. 7. Move the analysis window to another depth and repeat Steps 2 through 6. This will produce T as a function of MD. By changing the nominal analysis-window length S0, the tortuosity parameter can be obtained for various length scales. This, and the option to calculate T from either raw or smoothed data, allows for the separation of T into large-scale and small-scale tortuosity, as suggested by Gaynor et al. (2002). This is described further in the Discussion section. Transverse Displacements. The transverse displacement at a wellbore location is its deviation from a straight reference line at that location. The processing is carried out over a section of the wellbore at one particular depth. The along-hole length of the section and its location are determined by the user. The initial processing step is identical to the straight-line fitting procedure described previously. An analysis window V is used to select a subset MV of raw data points at the desired depth. In principle, V is independent of the analysis window W used for preprocessing of the raw data; however, V may also be chosen to be the same processing window. A straight line is fitted through the MV points by the principal-component-analysis method. This straight line will be the reference for the subsequent calculation of transverse displacements. It may further be interpreted as the “predominant direction” of the wellbore section, and as a “lineof-sight” when considering the results. The displacements for all MV raw data points are found by projecting each of these points perpendicularly onto the reference line. It is a straight-forward calculation to express the projection vectors in the 2D plane perpendicular to the line. Fig. 5a shows an example of transverse displacements, calculated from realsurvey data. The transverse displacements, and their distribution along the analyzed wellbore section, directly describe the geometry of the section. Thus, features such as the local amount of small-scale tortuosity, or the possible spiraling of the wellbore, can easily be detected and quantified. Furthermore, the displacements can be applied to 3D renderings of the wellbore section, giving a direct visualization of the geometric shape. Examples are shown in Fig. 5b and in the Results section. In all 3D renderings, we have assumed circular cross section of the wellbore/the casing, and diameters corresponding to nominal casing inner diameter. Effective Diameter. The tortuous buckling of a wellbore or casing section will reduce the effective inner diameter of that section, similar to the area of free sight that can be seen through a curved tunnel. The effective diameter is defined as the maximum diameter of a straight cylinder that can be inserted into the section without distorting it (i.e., just barely touching the inner walls). To yield a meaningful definition, the cylinder must have a length equal to or greater than the length of the wellbore or casing section. If the cylinder represents a physical downhole device, the processing window V should be chosen equal to the length of the device. As a result of irregular borehole washouts or drillstring or BHA wear on the formation, the openhole wellbore may not have a circular cross section. A deviation from circular cross section may also be found on tubings and casings for various other reasons. Such effects are neglected here, and it is assumed that the cross sections are perfectly circular. The reduction in diameter does not depend on the tortuosity of the wellbore or casing section only. The diameter reduction will, in general, also change with the orientation of the inserted cylinder. Fortunately, the cases that would occur most frequently, and also would need the most precise analysis, are expected to be nearly straight wellbore sections. In such cases, it is reasonable to let the cylinder’s axis (the line of sight) coincide with the reference line established for processing of transverse displacements. This implies that one can use the displacements directly in the calculation of the diameter reduction. Heavily bent sections can more easily be identified and judged as problematic, without extensive analysis. However, the processing of a reference line and transverse displacements may also be applied to these cases. Thus, a single formula for diameter 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 60 80 55 75 50 70 45 65 40 60 35 55 30 2500 2600 2700 2800 2900 3000 3100 3200 Inclination (degrees) Azimuth (degrees) PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 50 3300 MD (m) (a) Azimuth (degrees) 55 50 45 40 HRCG MWD 35 2500 2600 2700 2800 2900 3000 3100 3200 MD (m) (b) 25 HRCG MWD DLS (degrees/30 m) 20 15 10 5 0 2500 2600 2700 2800 2900 3000 3100 3200 MD (m) (c) Fig. 6—Field Case 1. (a) Inclination and azimuth from conventional MWD survey. (b) Comparison of azimuth from the conventional MWD survey and from an HRCG survey. (c) DLS curves calculated from the conventional MWD survey (inclination and azimuth), and from the HRCG survey (inclination and azimuth). reductions can be developed, which is valid for both low- and high-tortuosity regions. With the assumption of a circular cross section and a sufficiently high number MV of displacements (the number is discussed in the Discussion section), a good estimate for the effective diameter Deff is obtained from: qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ðxi xj Þ2 þ ðyi yj Þ2 ; when Deff ¼ Dnom maxi;j ; Dnom maxi;j ð…Þ Deff ¼ 0; when Dnom < maxi;j ð…Þ ð5Þ Stage: Page: 5 Total Pages: 10 where xi (xj) and yi (yj) are the displacement coordinates in the transverse plot shown in Fig. 5a, and maxi,j(…) means the maximum of the square-root function encountered over all possible combinations of i ¼ 1…MV, and j ¼ 1…MV. Dnom is the nominal inner diameter of the wellbore or casing. If the true diameter is measured, for example, by a caliper, these values might be used for Dnom; however, a diameter varying with MD or a noncircular cross section would require a more sophisticated equation for Deff. We did not pursue this further in this study; thus, all processed examples assume a nominal and constant value for Dnom. Deff is calculated with the length of the analysis window, which represents the downhole device, as the only external parameter. By shifting the analysis window throughout the well and calculating the effective diameter at each location, we obtain a graph of Deff vs. MD, for the selected device length. This graph may be plotted directly, or the results may be superimposed on a 3D visualization of the wellbore or casing shape. Examples are given in the following section. Results In all field cases, the tortuosity was analyzed from a high-resolution continuous gyro (HRCG) survey, which was run in cased hole (post-drilling). The continuous gyro survey is sampled at 22 Hz and preprocessed to produce a survey point every 0.4 seconds. The typical running speed in casing is 0.8 m/s, yielding 0.3 m (1 ft) between measurements. Smaller survey intervals are possible by increasing the preprocessing output rate, or by decreasing the running speed. The survey data are qualitychecked according to procedures that are based on published error models (Ekseth et al. 2011). Field Case 1. In a deepwater offshore well drilled in Latin America with a modern rotary-steerable system, a conventional MWD survey showed a straight tangent section with small doglegs (Fig. 6), but there were problems associated with running casing all the way to total depth (TD) (3290 m MD). There were indications of issues with the well on the trip out of the hole with the 121/4-in. BHA. Back reaming was required from TD to 2775 m MD. When running the 95/8-in. casing, the string hung up at 3264 m MD, and it could not go any further. Many attempts were made to pull the string free, but it remained stuck at 3261 m MD. A cleanout run of the 95/8-in. casing was required and resulted in abandoning several meters of casing. Even though there were several problems in this part of the well, the low DLS suggested that the completion equipment could be installed here. However, two production pumps failed prematurely, and it was decided to run an HRCG survey. Comparison between the MWD and the HRCG showed no evidence of gross error in the MWD data but indicated rapid azimuth fluctuations not detected by the conventional MWD survey (Fig. 6b). The DLS, based on the HRCG data, also indicated higher tortuosity below 3000 m MD but failed to provide a quantifiable measure (Fig. 6c). The tortuosity parameters calculated from the HRCG revealed much-more detail (Figs. 7 and 8) and explained very well all the issues with the casing and the production equipment. The evidence from the HRCG resulted in a decision to place the production pumps 150 meters higher than initially suggested to avoid future rework. The initial lack of information between the conventional MWD survey stations (30-m separation) resulted in several weeks of lost production and significant extra costs for the operator (estimated to be more than USD 7 million). Field Case 2. A land well at high-latitude north was drilled and surveyed with conventional MWD systems. The well profile is indicated in Fig. 9a. On the basis of the DLS plots (Fig. 9b), completion equipment was placed near 4,500 ft MD. After only a few months of operation, the production pump failed, and an HRCG survey was requested to evaluate the geometry and tortuosity of the wellbore. As in the previous example, no gross error was identified in the conventional MWD survey, and 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 5 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 2.5 Tortuosity (T ) 2 1.5 1 0 2700 2800 2900 MD (m) 3000 3100 3200 3000 3100 3200 Maximum Outer Diameter of Device (in.) (a) 8 7 6 5 4 3 2 1 0 2500 2600 Total Pages: 10 Field Case 3. A land well in the southern USA was surveyed with conventional MWD methods. The profile is shown in Fig. 12a. The well is vertical down to 6,300 ft MD and then builds rapidly to horizontal, reaching 90-degrees inclination at approximately 7,500 ft MD and remaining close to horizontal thereafter. To achieve maximum drawdown, it was required to position an electrical submersible pump (ESP) in the near horizontal-well section at the maximum true vertical depth at which pump placement was physically possible. To achieve the required pumping capacity, it was proposed to deploy an ESP of length 124 ft and diameter 4 in. in the well. The planned tangent section for pump placement was 7,626 to 7,934 ft MD. On the basis of the conventional MWD survey and DLS (Fig. 12b), the pump could have been placed at any depth between 7,750 and 7,950 ft MD. An HRCG survey was requested to confirm the planned pump location. The tortuosity analysis leads to a very different conclusion (Fig. 12c). The effective diameter curve indicates that the depths at which an ESP may be safely deployed in this well are far more restricted than is evident from the DLS analysis. The best locations at which a pump may be deployed are shown to be at depths of 7,880 ft MD or possibly at 7,815 ft MD (depths refer to center of pump), whereas depths less than 7,800 ft MD and greater than 7,890 ft MD should be avoided altogether. The Deff curve indicates that, if positioned at 7,880 ft MD, the ESP may have a maximum diameter of 3.1 in. to avoid contact with the casing, unless its length is shortened. This information led to a reconsideration of the installment plans. 0.5 2600 Page: 6 the coarse resolution of the conventional MWD data (100 ft) led to the initial conclusion that 4,400 to 4,500 ft MD was the region with lowest tortuosity. The HRCG data (interval ¼ 1 ft) indicated that the low-tortuosity region actually is found at 4,300 to 4,400 ft MD. This is confirmed by the effective-diameter plot (Fig. 10b), which further shows that, at 4,500 ft MD, there is no free line of sight over a length of 100 ft, and therefore this location should be avoided. A new pump was placed near 4,300 ft MD on the basis of this information. Fig. 11 shows the actual shape of the cased wellbore at the two locations. ×10–4 2500 Stage: 2700 2800 2900 MD (m) (b) Fig. 7—Field Case 1. Tortuosity curve T (a) and effective diameter curve Deff (b) calculated from HRCG survey raw data with processing window lengths S0 5 30 m and V 5 30 m, respectively. The nominal casing inner diameter is Dnom 5 8.83 in. Discussion Processing and Results. Both the tortuosity parameter T and the transverse displacements represent geometric features of the wellbore trajectory that can be intuitively understood—relative elongation of the trajectory compared with the straight line, and when the final positioning of the well was evaluated, the difference in coordinates between the two surveys was only 10 ft. A good overall correspondence can be observed between the DLS curve (Fig. 9b) and the tortuosity plot (Fig. 10a). However, 8 2500 2550 7 2600 2650 6 2700 1900 Vertical (m) 2750 2000 5 2800 2850 2900 2100 4 2950 2200 2300 1000 3 3000 700 3050 3100 3150 1100 900 1200 1000 1300 North (m) 1400 2 800 1 East (m) 0 1100 1500 Fig. 8—Field Case 1. Wellbore trajectory with superimposed transverse displacements over the whole HRCG survey interval 2500 to 3200 m MD. The analyzing window length is V 5 30 m. Transverse dimensions (wellbore diameter and displacements) were augmented by a factor of 100 for clarity. The Deff curve (Fig. 7b) was added in terms of color coding, according to the color bar shown on the right (blue 5 no diameter reduction from nominal 8.83 in.; red 5 diameter reduced to zero). 6 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 Stage: 90 75 Page: 7 Total Pages: 10 ×10–4 75 45 60 30 45 15 30 0 15 4.5 Tortuosity (T ) 60 Inclination (degrees) Azimuth (degrees) 5 4 3.5 3 2.5 2 1.5 1 MD (ft) (a) 6 DLS (degrees/100 ft) 5 4 3 2 1 0 0 0 0 0 500 1,000 1,500 2,000 2,500 3,000 3,500 4,000 4,500 5,000 500 1,000 1,500 2,000 2,500 3,000 3,500 4,000 4,500 5,000 MD (ft) (b) Fig. 9—Field Case 2. Inclination and azimuth (a) and DLS (b) from conventional MWD survey (interval 100 ft). sideways deviations from the straight line. The algorithms apply data from a single survey and just one input parameter—length of the analysis window, which effectively defines the length scale of the tortuosity results. These features make the methodology simple, robust, and superior to established methods such as the DLS analysis. The accuracy of the results is considered to be good. Using all information within the analysis window (from typically 30 stations), the parameters are virtually insensitive to small changes in the number of stations as the window is moved along the wellbore. Such small changes may occur because of the possible nonuniformity of the survey intervals. In particular, the ratio S/L in the T parameter will be even less sensitive to these changes than S or L alone. Furthermore, the use of all information within the window implies that the parameters increase or decrease smoothly if the window length is gradually changed. In early tests for both T and Deff, the results showed this smooth behavior, indicating reliable algorithm outputs, as long as the number of stations was typically >10. For survey report intervals of 0.3 m, for example, tortuosity can therefore be analyzed on length scales down to 3 m. The resolution interval of the output, on the other hand, is much smaller than the window length. According to the Shannon-Nyquist theorem (Ifeachor and Jervis 1993), the highest possible resolution is twice the sampling interval (theoretical limit, for band-limited signals); this amounts to 0.6 m for the previous example. The tortuosity analysis can be applied to data from openhole surveys, or from surveys inside drillstring, casing, or production tubing. The results should be expected to differ among all these cases because of possible buckling and misalignment of drillstring or tubing inside the hole/casing, and changes to borehole-wall roughness and undulations caused by insertion of the casing. One application of the methodology may therefore be to analyze such 500 1,000 1,500 2,000 2,500 3,000 3,500 4,000 4,500 5,000 MD (ft) (a) Maximum Outer Diameter of Device (in.) –15 0 0.5 9 8 7 6 5 4 3 2 1 0 0 500 1,000 1,500 2,000 2,500 3,000 3,500 4,000 4,500 5,000 MD (ft) (b) Fig. 10—Field Case 2. Tortuosity curve T (a) and effective-diameter curve Deff (b) on the basis of HRCG data and a device length of 100 ft. The nominal casing inner diameter is Dnom 5 8.83 in. differences; however, this is outside the scope of this study. In all field cases presented here, the HRCG survey was run in cased hole. For cases such as Field Case 3, the feasibility of other device dimensions can be evaluated easily by changing the length of the Deff analysis window. However, this was not performed in the present case. Furthermore, in situations where the tortuosity leads to bending of equipment, it would be possible to evaluate bending moments and final equipment shape by combining our detailed tortuosity description with the geometry and the material (stiffness) parameters of the device. It should also be emphasized that the methodology proposed in this paper relates only to the geometric shape of the wellbore, and factors such as reservoir pressure, tubing stiffness, or dynamic processes are not considered. Thus, the results should be interpreted as recommendations that are based on wellbore shape only. Factors other than tortuosity may be considered more important, and may therefore become the major factors in decisions regarding equipment installation and operation. Further Work. The smoothed data set proposed in the Theory section has not been examined in detail in this study. It is believed that it can be used to separate between large-scale and small-scale tortuosity, along the lines suggested by Gaynor et al. (2002). The reason for this is that tortuosity details can be processed with a maximum resolution equaling approximately twice the survey interval from the raw data set, whereas the smoothing procedure will efficiently suppress tortuosity on length scales shorter than the analysis window W, which typically is 10 to 30 times the survey interval. As mentioned in the Theory section, Dnom in Eq. 5 is assumed to be the nominal inner diameter of a wellbore or casing with a constant and circular cross section. On the basis of the field 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 7 15 High Side (in.) 10 5 0 Page: 8 Total Pages: 10 400 90 350 75 300 60 250 45 200 30 150 15 4,550 –5 –10 10 Stage: Inclination (degrees) Azimuth (degrees) PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 4,500 5 100 0 6,000 6,200 6,400 6,600 6,800 7,000 7,200 7,400 7,600 7,800 8,000 MD (ft) MD (ft) 0 –5 4,450 Lateral (in.) –10 (a) (a) DLS (degrees/100 ft) 6 8 4 2 0 4 3 2 1 –2 –4 7,550 7,600 7,650 7,700 7,750 7,800 7,850 7,900 7,950 8,000 MD (ft) 4,350 –6 6 4 2 0 –2 Lateral (in.) –4 4,250 (b) 4,300 MD (ft) (b) Maximum Outer Diameter of Device (in.) High Side (in.) 6 5 4 3.5 Fig. 11—Field Case 2. Wellbore shape computed from transverse displacements over 100-ft sections at two depths: (a) 4,500 ft MD (high-tortuosity region with Deff 5 0 in.) and (b) 4,300 ft MD (low-tortuosity region with Deff 6.7 in.). The nominal casing inner diameter is Dnom 5 8.83 in., and the colors indicate the calculated Deff values (refer to Fig. 8). examples, we believe that this gives sufficient accuracy for the present application. However, more accurate estimates for Deff would be obtained when using real Dnom values, for example, from caliper measurements. This also may require a more sophisticated formula for Deff. Furthermore, the Deff analysis can be extended for devices with noncircular or nonuniform (along the device) cross sections, and eventually allowing for some bending of the device, within the manufacturer’s or operator’s specifications. The T and Deff parameters may respond differently to various tortuosity geometries, as illustrated in Table 1. Therefore, by combining the information from the two parameters, we may obtain more detailed information on the nature of the tortuosity. For Wellbore Shape (local) 3 2.5 2 1.5 1 0.5 0 7,500 7,550 7,600 7,650 7,700 7,750 7,800 7,850 7,900 7,950 8,000 MD (ft) (c) Fig. 12—Field Case 3. (a) Inclination and azimuth from conventional MWD survey. (b) DLS calculated from the conventional MWD survey. (c) Effective diameter Deff curve on the basis of HRCG data and a device length of 124 ft. The nominal casing inner diameter is Dnom 5 6.28 in. Relative Elongation, T = (S–L)/L Span of Displacements Effective Diameter, Deff 0 0 Dnom (=max) Small Small Near Dnom Large Large Small Large Small Near Dnom Table 1—Response of tortuosity parameters T and Deff to various local shapes of the wellbore. The wellbore trajectories may be 3D. 8 2016 SPE Production & Operations ID: jaganm Time: 14:55 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 example, if T is large, as shown in the lower two lines of the table, the value of Deff may help to determine whether the elongation is caused by a single “long” curve (still within the analysis window), or caused by several microbends. A “shape parameter” derived from T and Deff, or from T and the span of transverse displacements, could be presented as a graph vs. MD, which may be more convenient than 3D renderings over large wellbore sections. Conclusions This paper has presented a novel methodology to analyze wellbore tortuosity, in particular, tortuosity on a length scale shorter than conventional survey report intervals (30 m). The input data are provided by a single high-resolution directional survey, which may use any surveying tool or procedure capable of delivering such high-resolution data. By applying a user-defined data window as a single external parameter, the method quantifies tortuosity on any length scale greater than approximately 10 times the survey-data interval, and with a maximum resolution that equals twice the data interval, in terms of • Tortuosity parameter; the relative elongation of along-hole length with respect to straight-line length. • Transverse displacements of the wellbore trajectory from a locally established reference line. • Effective inner diameter of wellbore or casing as a result of small-scale bending. The outputs can be presented individually or in combination, either as graphs vs. MD or in 3D renderings showing the actual geometry of the wellbore. The results are easily visualized, interpreted, and communicated to operating personnel, and represent a significant improvement from traditional tortuosity analysis methods on the basis of DLS. The methodology was applied to various field cases in which the results demonstrate the identification of highly tortuous regions that were unnoticed or poorly quantified by traditional methods. This information has direct relevance to decisions regarding the installation of equipment in the completion and production phases. The tortuosity analysis may thus contribute to more efficient operations and improvements to equipment functionality, eventually leading to reduced workover frequency and considerable cost savings. The possible applications of the methodology range from evaluation of the drilling process to the installation of completionand-production equipment. Nomenclature dNr,j, dEr,j, dVr,j ¼ raw data position increments in N, E, V at station j, ft or m Dnom ¼ nominal inner diameter of casing or wellbore, in. Deff ¼ effective diameter; maximum-allowed outer diameter of downhole device, in. L ¼ straight-line distance (between start and end stations of a section), ft or m MV ¼ number of survey stations covered by V window MW ¼ number of survey stations covered by W window N, E, V ¼ position coordinates: Northing, Easting, Vertical depth, ft or m N0, E0, V0 ¼ average (arithmetic mean) of N, E, V over a subset of survey stations, ft or m Nr,j, Er,j, Vr,j ¼ raw data position coordinates N, E, V of station j, ft or m P ¼ matrix used in principal-component analysis S ¼ along-hole distance; actual value of S0, ft or m S0 ¼ analysis window for tortuosity parameter; length of this window, ft or m T ¼ tortuosity parameter (Eq. 4) TKC ¼ tortuosity parameter in petrophysics (Eq. 3) V ¼ analysis window for effective-diameter analysis Stage: Page: 9 Total Pages: 10 W ¼ analysis window for establishing reference line xi, yi, xj, yj ¼ coordinates of displacement vectors i and j in plane transverse to reference line, in. Acknowledgments The authors want to thank Gyrodata and SandRidge Energy for permission to publish this work, and for providing field data. Furthermore, Rob Shoup, Gyrodata, is thanked for stimulating discussions. References API D20. 1985. Bull. on Directional Drilling Survey Calculation Methods and Terminology. Washington, DC: API. Bordakov, G. A., Kostin, A. V., Rasmus, J. et al. 2009. Improving LWD Image and Formation Evaluation by Using Dynamically Corrected Drilling-Derived LWD Depth and Continuous Inclination and Azimuth Measurements. SPE Res Eval & Eng 12 (1): 137–148. SPE109972-PA. http://dx.doi.org/10.2118/109972-PA. Brands, S. and Lowdon, R. 2012. Scaled Tortuosity Index: Quantification of Borehole Undulations in Terms of Hole Curvature, Clearance, and Pipe Stiffness. Presented at the IADC/SPE Drilling Conference and Exhibition, San Diego, California, USA, 6–8 March. SPE-151274-MS. http://dx.doi.org/10.2118/151274-MS. Chen, D. C.-K., Gaynor, T., and Comeaux, B. 2002. Hole Quality: Why It Matters. Presented at the SPE International Petroleum Conference and Exhibition, Villahermosa, Mexico, 10–12 February. SPE-74403-MS. http://dx.doi.org/10.2118/74403-MS. Davis, J. C. 1986. Statistics and Data Analysis in Geology, second edition, 527–531. New York, NY, USA: Wiley & Sons. Ekseth, R., Weston, J., Ledroz, A. et al. 2011. Improving the Quality of Ellipse of Uncertainty Calculations in Gyro Surveys to Reduce the Risk of Hazardous Events Like Blowouts or Missing Potential Production Through Incorrect Wellbore Placement. Presented at the SPE/IADC Drilling Conference and Exhibition, Amsterdam, 1–3 March. SPE-140192-MS. http://dx.doi.org/10.2118/140192-MS. Gaynor, T. M., Chen, D. C.-K., Stuart, D. et al. 2001. Tortuosity versus Micro-Tortuosity—Why Little Things Mean a Lot. Presented at the SPE/IADC Drilling Conference, Amsterdam, 27 February–1 March. SPE-67818-MS. http://dx.doi.org/10.2118/67818-MS. Gaynor, T., Hamer, D., Chen, D. C.-K. et al. 2002. Quantifying Tortuosities by Friction Factors in Torque and Drag Model. Presented at the SPE Annual Technical Conference and Exhibition, San Antonio, Texas, USA, 29 September–2 October. SPE-77617-MS. http:// dx.doi.org/10.2118/77617-MS. Ifeachor, E. C. and Jervis, B. W. 1993. Digital Signal Processing. A Practical Approach, reprinted 1999, Chap. 2. Harlow, England: AddisonWesley. Liu, X., Liu, R., and Sun, M. 2004. New Techniques Improve Well Planning and Survey Calculation for Rotary-Steerable Drilling. Presented at the IADC/SPE Asia Pacific Drilling Technology Conference and Exhibition, Kuala Lumpur, 13–15 September. SPE-87976-MS. http:// dx.doi.org/10.2118/87976-MS. Marck, J., Detournay, E., Kuesters, A. et al. 2014. Analysis of Spiraled Borehole Data Using a Novel Directional Drilling Model. Presented at the IADC/SPE Drilling Conference and Exhibition, Fort Worth, Texas, USA, 4–6 March. SPE-167992-MS. http://dx.doi.org/10.2118/167992MS. Marck, J. and Detournay, E. 2015. Spiraled Boreholes: An Expression of 3D Directional Instability of Drilling Systems. Presented at the SPE/ IADC Drilling Conference and Exhibition, London, 17–19 March. SPE-173156-MS. http://dx.doi.org/10.2118/173156-MS. Mason, C. J. and Chen, D. C.-K. 2006. The Wellbore Quality Scorecard (WQS). Presented at the IADC/SPE Drilling Conference, Miami, Florida, USA, 21–23 February. SPE-98893-MS. http://dx.doi.org/10.2118/ 98893-MS. Matthews, C. M. and Dunn, L. J. 1993. Drilling and Production Practices to Mitigate Sucker-Rod/Tubing-Wear-Related Failures in Directional Wells. SPE Prod & Fac 8 (4): 251–259. SPE-22852-PA. http:// dx.doi.org/10.2118/22852-PA. 2016 SPE Production & Operations ID: jaganm Time: 14:56 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008 9 PO173103 DOI: 10.2118/173103-PA Date: 15-March-16 Matyka, M. and Koza, Z. 2012. How to Calculate Tortuosity Easily? American Institute of Physics (AIP) Conference Proceedings 1453, Potsdam, Germany, 17–22 June. http://dx.doi.org/10.1063/1.4711147. [or arXiv:1203.5646v1 [physics.flu-dyn] 26 Mar 2012]. Menand, S., Sellami, H., Tijani, M. et al. 2006. Buckling of Tubulars in Actual Field Conditions. Presented at the SPE Annual Technical Conference and Exhibition, San Antonio, Texas, USA, 24–27 September. SPE-102850-MS. http://dx.doi.org/10.2118/102850-MS. Menand, S., Sellami, H., Bouguecha, A. et al. 2009. Axial Force Transfer of Buckled Drill Pipe in Deviated Wells. Presented at the SPE/IADC Drilling Conference and Exhibition, Amsterdam, 17–19 March. SPE119861-MS. http://dx.doi.org/10.2118/119861-MS. Mitchell, R. F. and Weltzin, T. 2011. Lateral Buckling—The Key to Lockup. SPE Drill & Compl 26 (3): 436–452. SPE-139824-PA. http:// dx.doi.org/10.2118/139824-PA. Mitchell, R. F., Bjørset, A., and Grindhaug, G. 2015. Drillstring Analysis With a Discrete Torque/Drag Model. SPE Drill & Compl 30 (1): 5–16. SPE-163477-PA. http://dx.doi.org/10.2118/163477-PA. Oag, A. W. and Williams, M. 2000. The Directional Difficulty Index—A New Approach to Performance Benchmarking. Presented at the IADC/ SPE Drilling Conference, New Orleans, 23–25 February. SPE-59196MS. http://dx.doi.org/10.2118/59196-MS. Reid, L. C., McDonald, C., Baker, T. et al. 2013. Pump-Friendly Wellbore Design and Case Study From Mississippian Play of Oklahoma/Kansas. Presented at the SPE Unconventional Resources Conference, Calgary, 5–7 November. SPE-167156-MS. http://dx.doi.org/10.2118/167156MS. Samuel, G. R., Bharucha, K., and Luo, Y. 2005. Tortuosity Factors for Highly Tortuous Wells: A Practical Approach. Presented at the SPE/ IADC Drilling Conference, Amsterdam, 23–25 February. SPE-92565MS. http://dx.doi.org/10.2118/92565-MS. Samuel, R. and Liu, X. 2009. Wellbore Tortuosity, Torsion, Drilling Indices, and Energy: What Do They Have to Do With Well Path Design? Presented at the SPE Annual Technical Conference and Exhibition, New Orleans, 4–7 October. SPE-124710-MS. http://dx.doi.org/ 10.2118/124710-MS. Samuel, R. and Gao, D. 2013. Horizontal Drilling Engineering–Theory, Methods and Application, first edition, Chap. 9. Houston: SigmaQuadrant. Sawaryn, S. J. and Thorogood, J. L. 2005. A Compendium of Directional Calculations Based on the Minimum Curvature Method. SPE Drill & Compl 20 (1): 24–36. SPE-84246-PA. http://dx.doi.org/10.2118/ 84246-PA. Skillingstad, T. 2000. At-Bit Inclination Measurements Improves Directional Drilling Efficiency and Control. Presented at the IADC/SPE Drilling Conference, New Orleans, 23–25 February. SPE-59194-MS. http://dx.doi.org/10.2118/59194-MS. Stockhausen, E. J. and Lesso, W. G. 2003. Continuous Direction and Inclination Measurements Lead to an Improvement in Wellbore Positioning. Presented at the SPE/IADC Drilling Conference, Amsterdam, 19–21 February. SPE-79917-MS. http://dx.doi.org/10.2118/79917MS. Stuart, D., Hamer, C. D., Henderson, C. et al. 2003. New Drilling Technology Reduces Torque and Drag by Drilling a Smooth and Straight Wellbore. Presented at the SPE/IADC Drilling Conference, Amsterdam, 19–21 February. SPE-79919-MS. http://dx.doi.org/10.2118/ 79919-MS. 10 Stage: Page: 10 Total Pages: 10 Sugiura, J. and Jones, S. 2008. The Use of the Industry’s First 3-D Mechanical Caliper Image While Drilling Leads to Optimized Rotary-Steerable Assemblies in Push- and Point-the-Bit Configurations. Presented at the SPE Annual Technical Conference and Exhibition, Denver, 21–24 September. SPE-115395-MS. http://dx.doi.org/10.2118/115395-MS. Sugiura, J., Bowler, A., Hawkins, R. et al. 2013. Downhole Steering Automation and New Survey Measurement Method Significantly Improve High-Dogleg Rotary Steerable System Performance. Presented at the SPE Annual Technical Conference and Exhibition, New Orleans, 30 September–2 October. SPE-166165-MS. http://dx.doi.org/10.2118/ 166165-MS. Weltzin, T., Aas, B., Andreassen, E. et al. 2009. Measuring Drillpipe Buckling Using Continuous Gyro Challenges Existing Theories. SPE Drill & Compl 24 (4): 464–472. SPE-115930-PA. http://dx.doi.org/ 10.2118/115930-PA. Jon Bang has been a development engineer at Gyrodata since 2013. Previously, he was with SINTEF Petroleum Research, Norway, working on wellbore-position uncertainty analysis. Bang’s current research interests include error modeling, quality control, and data processing related to wellbore surveying. He holds an MSc degree in electronics and a PhD degree in laser physics, both from the Norwegian University of Science and Technology. Bang is a member of SPE, and an active member of the Industry Steering Committee on Wellbore Survey Accuracy (ISCWSA). Onyemelem Jegbefume is a research and development engineer at Gyrodata. Previously, he worked for 3 years as a systems engineer for Rockwell Collins. Jegbefume’s current research interests include algorithms for wellbore surveying, communication systems, and signal processing for oilfield applications. He holds a PhD degree in electrical engineering from the University of Texas at Dallas. Jegbefume is a member of SPE. Adrián Ledroz is the Vice President, Survey Technologies, Technical Services for Gyrodata. He has worked with gyroscopes for the last 15 years, and his research interests include inertial sensors, data processing, quality control, and error modeling related to wellbore surveying. Ledroz holds a BSc degree in biomedical engineering from Universidad Nacional de Entre Rı́os, Argentina, and an MSc degree in electrical engineering from the University of Calgary, Canada. He is a member of SPE, and an active member of ISCWSA. John Weston is the Global Adviser Gyro Technology for Gyrodata, and his research interests are in inertial systems and their application to wellbore surveying. He holds a BSc degree in electrical engineering from the University of Wales and an MSc degree in information and systems engineering from the University of Birmingham, UK. Weston is coauthor of the textbook Strapdown Inertial Navigation Technology. He is a member of the Institution of Engineering Technology and SPE, and is an active member of the ISCWSA. John H. (Jay) Thompson is the Artificial Lift Specialist with SandRidge Energy in Oklahoma City, Oklahoma. He has been with SandRidge for 3 years but has been in the pumping industry, both surface pumping and downhole, for more than 26 years. Thompson’s interests include the effects of wellbore design and how it affects ESP pumps, root-cause failure analysis, and how the longevity of downhole equipment can be improved. He is a member of SPE. 2016 SPE Production & Operations ID: jaganm Time: 14:56 I Path: S:/PO##/Vol00000/160008/Comp/APPFile/SA-PO##160008