Design of an Asynchronous Brain-Computer
Interface for Control of a Virtual Avatar
Hye-Soo An, Jeong-Woo Kim, and Seong-Whan Lee
Department of Brain and Cognitive Engineering, Korea University, Seoul, Korea
{hs_an, jw_kim, sw.lee}@korea.ac.kr
Abstract—Brain-Computer Interface (BCI) enables the human to
control external devices by measuring brain activities. Among the
various BCI paradigms, motor imagery (MI) is the natural one to
accomplish the objectives of BCI. The asynchronous mode
enables the user to perform the MI in a self-paced manner. In
this study, we propose a design of the asynchronous BCI based on
MI for control of a virtual avatar in BCI game. Filter bank
common spatial pattern (FBCSP) is applied in proposed system
to discriminate correctly and detect rapidly the user’s different
intention based on EEG analysis in real-time. In conclusion, we
expect that our system would improve the performance of MIbased asynchronous BCI system.
Keywords-Asynchronous system; Motor Imagery; Cybathlon;
Brain Computer Interface (BCI); Electroencephalogram (EEG);
Filter bank common spatial pattern (FBCSP);
I.
INTRODUCTION
Brain-Computer Interface (BCI) allows a user to control
computer applications by measuring brain signal such as
electroencephalography (EEG) [1]. Several EEG-based BCI
systems rely on voluntary modulations of sensory motor
rhythms (SMRs) (e.g., imagination of motor movement) [2].
Also there is the evidence that patients diagnosed with
amyotrophic lateral sclerosis (ALS) can accomplish SMR
modulations [1]. A distinct effect is that both movement and
motor imagery (MI) of a limb are accompanied by a decrease
of power in mu and beta frequency bands known as eventrelated desynchronization (ERD) and followed rebound of
power in the beta band known as event-related synchronization
(ERS). The spatial patterns of ERD and ERS are specific for
each limb. For these reasons, MI is considered as one of the
natural paradigms for building a BCI [3].
There are two kinds of modes for MI-based BCI system
(MI-BCI): synchronous (cue-paced) and asynchronous (selfpaced) [3]. The former is easier to implement but less
convenient to reflect the user’s intent. In contrast, the latter
called asynchronous MI-BCI controls the interface
continuously without cues or temporal constraints in the real
world. However, there were some limitations in the systematic
approach. First, the continuous signal processing over the time
was followed but did not consider the overlapped time. Second,
the extension to multiclass classification for various commands
was not taken into account well. In addition, features extracted
from the broadly estimated frequency band had been
commonly used and led to the degradation of system
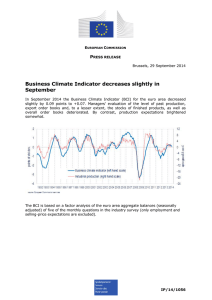
(A)
(B)
Figure 1. BrainRunners. (A) Screenshot. (B) Setup.
performance. To solve the problem, the Filter Bank Common
Spatial Pattern (FBCSP) algorithm [4], which enables the
system to select autonomously the discriminative subjectspecific frequency range, has proposed to be as effective in
synchronous but yet to be explored in asynchronous mode.
In this paper, we propose a novel design of the multiclass
asynchronous MI-BCI with the advanced signal processing
methods used to detect and discriminate different motor
imagery classes on real-time EEG analysis, which is applicable
to virtual running environment.
II.
MATERIALS AND METHODS
A. Application
BrainRunners presented in Fig. 1 is a multi-play “running”
game developed for the BCI race of the Cybathlon [5]. Each
avatar continuously runs to the finish line of the race even
though there is no command input. Running on a specific
colored pad, the player who controls the avatar has to send the
matched command using the BCI. There are three kinds of the
colored pads including SPEED, JUMP, and ROLL action. The
standard user datagram protocol (UDP) as a network protocol
is used to send the commands for avatar to the game and the
input value of command to each pad is predetermined in the
game manual. If the player sends the correct command in the
respective action pad, then it gives the advantage time (8.0 s)
and lasts boost until the end of the pad. However, the erroneous
command (e.g. ROLL command on SPEED pad) brings about
the delayed time (2.5 s). The player reaching the finish line as
the first wins the race.
B. Asynchronous MI-BCI
Our BCI system runs in two phases: the calibration phase
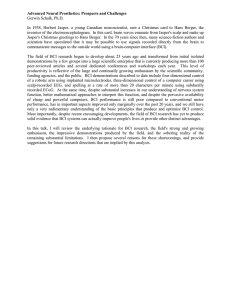
and the feedback phase. We designed an asynchronous MI-BCI
Figure. 2 System architecture of the asynchronous MI-BCI
applicable to BrainRunners online BCI game. The system
architecture is shown in Fig. 2.
1) Calibration phase: The subjects are instructed to
perform motor imagination tasks indicated on the gray screen
for every eight seconds. One trial is composed of 2 s fixation
cross, 4 s motor imagery cued by arrows, and 2 s blank screen.
There are the arrow-shaped visual cues pointing left, right, or
down and each cue corresponds to imaginary movement of the
left hand (LH), right hand (RH), or foot (F). Also the blank
screen refers to resting state (REST). In one run, 25 trials of
each motor imagination condition are recorded. Above all, we
record the raw EEG data in one run of performed movements
and then three runs of imagined movements [1]. The recorded
the EEG signals are used for the training of the classifier and
assessment of generalization error by cross-validation [2].
a) Filter Bank Common Spatial Pattern: In the FBCSP,
the EEG signals are first bandpass-filtered into multiple
frequency bands, namely, 4-8, 8-12, …, 36-40 Hz [4]. The
signals are segmented in the regular time interval of 4s. After
that, spatial filtering using the Common Spatial Pattern (CSP)
for multiclass MI is performed for nine bands. Then, Mutual
Information based Best Individual Feature (MIBIF) algorithm
is used to select the discriminative CSP features from the filter
bank [4].
b) Regularized Linear Discriminant Analysis: The
shrinkage-Regularized Linear Discriminant Analysis (RLDA)
is used to classify the selected features. In particular, the
RLDA classifier in One-Versus-Rest (OVR) approach is
employed for classification of four-class of MI (e.g., LH, RH,
F and REST).
2) Feedback Phase: After the calibration phase, the
subjects are instructed to control the avatar in BrainRunners
by performing the motor imagination tasks. In this phase, the
EEG signals are recorded with 250 Hz of sampling rates. For
real-time operation, features are calculated every 40 ms with a
sliding 3 s window [1]. The output of the classification is
processed through applying the CSP filters, band-pass
filtering, calculating log-variance and applying the OVR
RLDA classifier in 1b). To send the subject’s commands to
the application, we construct UDP object associated with the
remote host. Until binding to the local socket, the
classification result of the asynchronous BCI system is not
transmitted to the remote application.
a) Online interface control: Connecting the BCI system
to BrainRunners, the avatar is synchronized to each subject.
While the avatars are standing at the starting line, every
command is invalid. After starting the race, the subject
controls the avatar using the BCI input.
III.
DISCUSSION AND CONCLUSION
In the real world, the key is how does BCI system rapidly
detect and correctly discriminate the user’s different intention.
This paper has described a novel design of the multiclass
asynchronous MI-BCI for control of a virtual avatar. In
particular, finding the subject-specific parameters in the
multiclass extension of FBCSP and applying those in the
asynchronous MI-BCI would improve the performance of
classification compared to the previous MI-BCI studies. In
addition, the introduction of the overlapped sliding window for
real-time operation is expected to make the system more
efficient and the user more convenient. Therefore, our future
work is to implement this designed BCI and demonstrate the
systematic efficiency in some experiments.
ACKNOWLEDGMENT
This work was supported by ICT R&D program of
MSIP/IITP. [R0126-15-1107, Development of Intelligent
Pattern Recognition Softwares for Ambulatory Brain-Computer
Interface].
REFERENCES
[1]
[2]
[3]
[4]
[5]
B. Blankertz, C. Sannelli, S. Halder, E.M. Hammer, A. Kübler, K.-R.
Müller, G. Curio, and T. Dickhaus, “Neurophysiological Predictor of
SMR-based BCI Performance,” NeuroImage, Vol. 51, No. 4, 2010, pp.
1303-1309.
B. Blankertz, R. Tomioka, S. Lemm, M. Kawanabe, and K.-R. Müller,
“Optimizing Spatial Filters for Robust EEG Single-Trial Analysis,”
IEEE Signal Processing Magazine, Vol. 25, No. 1, 2008, pp. 41-56.
R. Kus, D. Valbuena, J. Zygierewicz, T. Malechka, A. Graeser, and P.
Durka, “Asynchronous BCI Based on Motor Imagery With Automated
Calibration and Neurofeedback Training,” IEEE Trans. Neural Syst.
Rehabil. Eng., Vol. 20, No. 6, 2012, pp. 823-835.
K. K. Ang, Z. Y. Chin, H. Zhang, and C. Guan, “Filter Bank Common
Spatial Pattern (FBCSP) in Brain-Computer Interface,” Proceedings of
the IEEE International Joint Conference on Neural Networks, 2008, pp.
2391-2398.
Cybathlon: BCI Race – Races & Rules (Ver. 2015-06-12),
http://www.cybathlon.ethz.ch/the-disciplines/bci-race.html