Universiti Teknologi Brunei
INSTRUMENTATION AND MEASUREMENT LABORATORY
REPORT
SPEED MEASUREMENT SENSOR PANEL (MIT3)
Lois@Umpam Anak Ambol
Mechatronics Engineering Intake 05
Semester 6
2019
Table of Contents
1.
Introduction ........................................................................................................................................... 2
2.
Objectives ............................................................................................................................................. 4
3.
List of Equipment ................................................................................................................................. 4
4.
Observation and Analysis ..................................................................................................................... 5
Chapter 1: Characterization of Motor Speed Vs Motor Voltage .............................................................. 5
Chapter 2: Magnetic Pick Up .................................................................................................................... 6
Chapter 3: Hall Effect Sensors .................................................................................................................. 7
Chapter 7: Stroboscope Method................................................................................................................ 8
5.
Discussions ........................................................................................................................................... 8
6.
Review Questions ................................................................................................................................. 9
7.
Conclusion .......................................................................................................................................... 10
8.
Appendixes ......................................................................................................................................... 11
Page 1 of 11
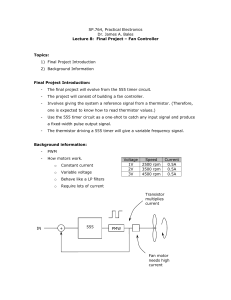
1. Introduction
Speed Measurement sensor Panel (MIT3) is an equipment that consisting 6 sensors that is useful
for Speed measurement application (non-contact type sensors). This unit is fully devoted for the
speed measurement. To operate this equipment correctly a Sensor Trainer Kit is used. The layout
for the MIT3 is as shown at Figure 1.
Figure 1. Overlay View of MIT3
The MIT3 consists of 6 (non-contact type sensors) namely:
1)
2)
3)
4)
5)
6)
Magnetic Pick up
Hall effect sensor
Inductive sensor
Photo Reflective
Photo Interruptive
Stroboscope
Discussion of fundamentals
Speed measurements using techniques like use of Magnetic pick up, Inductance, Photo reflection,
Photo Interruption, Hall effect switch & Stroboscope are described in following sub units. For flow
measurement one need a separate attachment, needs to be ordered separately. Magnetic pick up,
inductance and Hall effect switch uses magnetism whereas photo reflection & photo reflection
uses optical properties. Stroboscope is based on optics and persistence of vision property of human
eye.
All the sensors mentioned above are placed in the vicinity to a slotted wheel (8slots) fitted to the
motor shaft. This slotted wheel causes interruption in magnetism of Magnetic pick up, Inductance
and Hall effect switch. It causes interruption in optical path of photo reflective and photo
Page 2 of 11
interruptive sensors. Thus, causes some periodic generation of voltage converter. Converter output
having passed through zero span amplifier can be measured as speed indication.
For 8 teeth rotating wheel, one will get 8 times the motor shaft frequency for hall, Inductive,
Reflective, Interruptive etc. Hence divide by 8 to arrive at motor shaft frequency [(f) RPM = f
×60]. Here one must be varied it while checking frequency on CRO. Due to mechanical
manufacturing tolerances, all the teeth of shaft may not be same in size. Also due to wobble in
plane of wheel, the pulse width may not be identical for each tooth. Hence always count width of
6 to 10 pulses then frequency of pulses (after inverting). This frequency then has to be further
divided by 8 or 2 depending upon nature of sensor e.g. stroboscope factor of 2. Sometimes one
way gets a narrow pulse, by applying discretion and consider the same else one will have error to
the extent of 16% (6 pulse averaging) due to missed pulse /count. Stroboscope is basically an
oscillator which drives lamp. This flashing lamp illuminated the surface of slotted wheel on motor
shaft. When motor speed matches with flashing rate of the lamp a steady pattern image can be
observed on rotating slotted wheel. This property is used to measure the speed of motor. You
should be able to observe a steady, but dumbbell shaped dark solid figure. However, a faint figure
can appear for integral multiple of speed rate too. Also note the factor of two to arrive at actual
motor frequency.
The experiments that needed to be carried out are divided to 7 chapters:
Chapter 1:
Characterization of Motor Speed Vs Motor Voltage
Chapter 2:
Magnetic Pick up
Chapter 3:
Hall effect sensor
Chapter 4:
Inductive sensor
Chapter 5:
Photo Reflective Method
Chapter 6:
Photo Interruptive Method
Chapter 7:
Stroboscope Method
An extra chapter (chapter 8) consist of review questions of all the above chapters.
Page 3 of 11
2. Objectives
By completing the experiment, the ability to understand and describing the operation of following
functional blocks typically used in instrumentation will be fulfilled.
• Wein bridge oscillator
• F TO V converter
• Buffer amplifier
• Programmable threshold comparator
• Comparator
• Span zero amplifier
Upon completing each chapter, the following objectives should be completed. However only
Chapter 1,2,3 and 7 were carried out.
Chapter 2: Magnetic pick up
To understand the behavior of Magnetic pick up.
To observe the Magnetic pick up as Motor Speed sensor.
Chapter 3: Hall effect sensor
To understand the Hall effect and its use for motor speed measurement.
Chapter 7: Stroboscope Method
To understand the motor speed measurement using Stroboscope.
3. List of Equipment
The following equipment are required to execute the experiments.
1) DC Power supply ± 12𝑉 (Provided by Sensor Trainer Kit)
2) Voltmeter
3) CRO
4) MIT3
Page 4 of 11
4. Observation and Analysis
Chapter 1: Characterization of Motor Speed Vs Motor Voltage
Observations
1000
900
800
700
600
500
400
300
200
100
0
8000
7000
6000
5000
4000
RPM
Frequency (Hz)
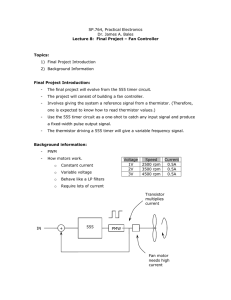
Table A.1 shows the reading of the frequency (Hz) at tp13, measured from CRO. A graph of motor
speed VS motor voltage is plotted, shown in Figure 2.
3000
2000
Frequency
1000
RPM
0
0
2
4
6
8
10
12
Motor Voltage
Figure 2 Motor speed VS motor voltage
Analysis
Based on Figure 2, as the motor voltage increases, the frequency and the RPM also increases. The
increments have a linear relationship or directly proportional to the motor voltage. In theory if the
motor exceeds the voltage rating, the motor will be in saturated state, where the RPM will be
constant (fixed at max rpm) and will overheat the stator if prolonged.
Page 5 of 11
Chapter 2: Magnetic Pick Up
Observations
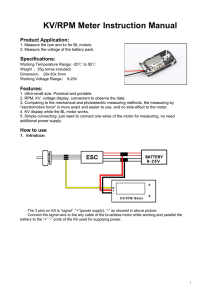
Table A.2 shows the reading of the frequency (Hz) at tp13, measured from CRO. A graph of motor
speed VS motor voltage is plotted, shown in Figure 3.
8000
7000
RPM
6000
5000
4000
3000
2000
1000
0
0
2
4
6
8
10
12
Motor Voltage
RPM (based on Freq)
RPM (based on O/P Voltage)
Линейная (RPM (based on Freq))
Линейная (RPM (based on O/P Voltage))
Figure 3 Motor speed VS motor voltage
Analysis
By referring to Appendixes, Table A1 and Table A2, the RPM calculated is within the
range of acceptable tolerance. A maximum of 6945 RPM calculated using formula and 6696.45
RPM calculated from output voltage. From Figure 3, it can be seen that both RPMs shows a linear
relationship which is expected, but the RPM calculated from the output voltage has a constant but
lower offset from the RPM calculated based on measured frequency. Focusing on the dotted lines
for each RPMs from Figure 3, both the calculated RPMs are accurate and precise, but the RPM
calculated using o/p voltage is not accurate with respect to the frequency calculated RPMs.
Page 6 of 11
Chapter 3: Hall Effect Sensors
Observations
Table A.3 shows the reading of the frequency (Hz) at tp13, measured from CRO. A graph of motor
speed VS motor voltage is plotted, shown in Figure 4.
8000
7000
6000
RPM
5000
4000
3000
2000
1000
0
0
2
4
6
8
10
12
Motor Voltage
RPM (based on Freq)
RPM (based on output voltage)
Линейная (RPM (based on Freq))
Линейная (RPM (based on output voltage))
Figure 4 Motor speed VS motor voltage
Analysis
By referring to Appendixes, Table A2 and Table A3, the frequency calculated RPMs are within
the range of acceptable tolerance. A maximum of 6818.18 RPM calculated using formula and 3920
RPM calculated from output voltage, halves from the expected value (from Table A2). This may
cause by uncalibrated offset or systematic error in the sensor. From Figure 4, it can be seen that
both RPMs shows a linear relationship which is expected, but the RPM calculated from the output
voltage has a constant but lower (halves) offset from the RPM calculated based on measured
frequency. Focusing on the dotted lines for each RPMs from Figure 4, both the calculated RPMs
are accurate and precise, but the RPM calculated using o/p voltage is not accurate with respect to
the frequency calculated RPMs.
Page 7 of 11
Chapter 7: Stroboscope Method
Observations
The experiment for this method was correctly executed but the variance(fluctuation) of the voltage
reading are too high, that may cause by equipment faulty. After adjusting the Zero and SPAN knob
to the required voltage multiple time, the variance still present. However, the “dumbbell” shaped
mirage at the motor shaft was present.
5. Discussions
Having all the motor’s RPMs tabulated, Graphs of each method are plotted and compared in Figure
6.
8000
7000
6000
RPM
5000
4000
3000
2000
1000
0
0
2
4
6
8
10
Motor Voltage
Characteristic
Magnetic Pick up
Hall effect sensor
The measured RPM for the three methods is accurate and precise.
Page 8 of 11
12
6. Review Questions
Table below shows the review questions with its answers. The following question are found in the
MIT-3 Booklet [Speed Measurement].
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Questions
Magnetic Pickup consists of:
Answers
(b) Coil wound around magnet field
Magnetic pickup o/p requires for motor
measurement:
Inductance used for motor speed
measurement is based on:
Optical transmitter receiver is useful
for motor speed measurement due to:
Photo reflective /Photo Interruption
sensor requires:
Hall effect switch for motor speed
measurement requires:
Stroboscope speed measurement:
Stroboscope consist of:
(c) Amplification, Pulse formation, Freq. to
voltage converter
(a) 𝜂𝐿 = 2𝜋𝑓𝐿
(b) Use of slotted wheel on Motor shaft
(a) Reflective surface wheel on motor shaft
(b) Constant current
(a) Persistence of vision principle
(b) Variable frequency oscillator which drives
lamp ON & OFF
Stroboscopic effect gives steady image (b)Motor speed and oscillator frequency are
on painted wheel of motor shaft when: equal
Speed measurement circuity on panel (a) Frequency to voltage converter
uses:
Inductive sensor on panel for speed (b) High Frequency excitation (KHz)
measurement requires:
Speed measurement using various (c) Using frequency converter instead F to V
sensors can be improved by:
converter
A light beam is to set up across the (b) Infra-red light is to be used
entrance of doorway in a building.
State the type of transducers {both
transmitter and receiver} that you
would recommend given:
The standard target for an inductive (a)mild steel
sensor is made of
The approximate angle of the aim cone (b)10
of an ultrasonic sensor is _____ degrees
______ proximity sensors develop an (d) Capacitive
electrostatic field to detect the target
Page 9 of 11
7. Conclusion
Overall for characteristic, magnetic pick up, hall effect method except the stroboscope, were
successfully executed. The speed of the motor was identified, and it was found to be precise for
three methods but lacking accuracy, this majorly from systematic errors.
For the stroboscope, the idea of fixed timed pulsating light when flashed to the motor shaft
producing a stationary mirage “dumbbell” and taking the frequency of the pulsating light can
determine the frequency of the motor and hence the speed.
With all the objectives learnt, therefore the experiment was successful
Page 10 of 11
8. Appendixes
Table A.1 Characteristics of motor speed VS motor voltage
Motor
Voltage
(V)
0.5
1
2
3
4
5
6
7
8
9
10
Freq @ tp13 (Hz)
RPM = f x 7.5
25
83.3
166.7
270.27
357.14
454.5
526.32
606.06
694.44
806.45
892.86
187.5
624.75
1250.25
2027.03
2678.55
3408.75
3947.4
4545.45
5208.3
6048.38
6696.45
Table A.2 Magnetic Pick Up
Motor
Voltage
(V)
2
3
4
5.048
6
7
8.105
9.4
10.25
Freq @ tp13
(Hz)
172.41
277.78
350.9
434.78
500
645.2
666.6
847.5
926
RPM using (f /8
x60) formula
1293.08
2083.35
2631.75
3260.85
3750
4839
4999.5
6356.25
6945
Output voltage
(V)
0.470
0.763
1.030
1.35
1.52
1.9
2.4
3.021
3.33
Speed RPM = O/P
voltage x2000
1250.25
2027.03
2678.55
3408.75
3947.4
4545.45
5208.3
6048.38
6696.45
Table A.3 Hall Effect sensors
Motor
Voltage
(V)
2
3
4
5.048
6
7
Freq @ tp13
(Hz)
178.44
266.67
357.42
444.44
555.55
632.91
RPM using (f /8
x60) formula
1293.08
2083.35
2631.75
3260.85
3750
4839
Output voltage
(V)
0.368
0.572
0.785
0.960
1.182
1.386
Page 11 of 11
Speed RPM = O/P
voltage x2000
1250.25
2027.03
2678.55
3408.75
3947.4
4545.45
8.080
9
10.343
724.63
806.45
909.09
4999.5
6356.25
6945
1.58
1.741
1.96
Page 12 of 11
5208.3
6048.38
6696.45