Chapter-16 Planar Kinematics of a Rigid Body
advertisement

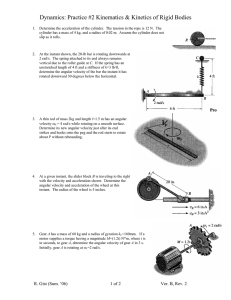
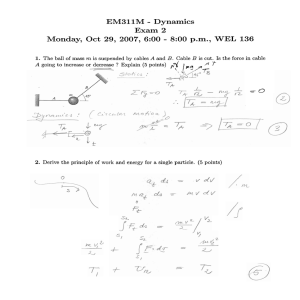
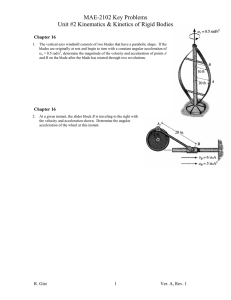
CHAPTER OBJECTIVES • To classify the various types of rigid-body planar motion. • To investigate rigid-body translation and angular motion about a fixed axis. • To study planar motion using an absolute motion analysis. • To provide a relative motion analysis of velocity and acceleration using a translating frame of reference. • To show how to find the instantaneous center of zero velocity and determine the velocity of a point on a body using this method. • To provide a relative-motion analysis of velocity and acceleration using a rotating frame of reference. IMPOTANCE This study is important for the design of gears, cams, and mechanisms used for many mechanical operations Once the kinematics is thoroughly understood, then we can apply the equations of motion, which relate the forces on the body to the body's motion. Planar Rigid-Body Motion There are three types of rigid body planar motion 1.Translation: When a line in the body remains parallel to its original orientation throughout the motion. a) When the paths of motion for any two points on the body are parallel lines, the motion is called rectilinear translation b) If the paths of motion are along curved lines which are equidistant, the motion is called curvilinear translation rectilinear translation curvilinear translation Planar Rigid-Body Motion There are three types of rigid body planar motion 2.Rotation about a fixed axis. When a rigid body rotates about a fixed axis, all the particles of the body, except those which lie on the axis of rotation, move along circular paths. Planar Rigid-Body Motion There are three types of rigid body planar motion 3.General plane motion. When a body is subjected to general plane motion, it undergoes a combination of translation and rotation. The translation occurs within a reference plane, and the rotation occurs about an axis perpendicular to the reference plane. Mechanism Rotation about a Fixed Axis Angular Displacement dθ is measured in degrees, radians, or revolutions, where 1 rev = π rad Angular Velocity Angular Acceleration Position and Displacement. The position of P is r. Corresponding displacement of angular displacement dθ is ds = rdθ. Velocity ds rd v r dt dt Acceleration v 2 r 2 2 an r 2 r r dv rd at r dt dt 16-6. The mechanism for a car window winder is shown in the figure. Here the handle turns the small cog C, which rotates the spur gear S, thereby rotating the fixedconnected lever AB which raises track D in which the window rests. The window is free to slide on the track. If the handle is wound at 0.5 rad/s, determine the speed of points A and E and the speed Vw of the window at the instant e θ= 30°. 16–27. For a short time, gear A of the automobile starter rotates with an angular acceleration of α A=(450t2+60) where t is in seconds. Determine the angular velocity and angular displacement of gear B when t=2 s , starting from rest. The radii of gears A and B are 10 mm and 25 mm, respectively. Absolute Motion Analysis 16-41. Crank AB rotates with a constant angular velocity of 5 rad/s. Determine the velocity of block C and the angular velocity of link BC at the instant θ = 30°. 16–45. At the instant θ=30° crank AB rotates with an angular velocity of 10 rad/s and angular acceleration of 2 rad/s2, respectively. Determine the velocity and acceleration of the slider block C at this instant. Take a = b = 0.3 m. 16–46. At the instant θ=30° crank AB rotates with an angular velocity of 10 rad/s and angular acceleration of 2 rad/s2, respectively. Determine the angular velocity and angular acceleration of the connecting rod BC at this instant. Take a =0.3m b = 0.5m. 16–51. If the hydraulic cylinder AB is extending at a constant rate of 1 ft/s, determine the dumpster’s angular velocity at the instant θ=30°. Relative-Motion Analysis: Velocity The link shown in Fig is guided by two blocks at A and B, which move in the fixed slots. If the velocity of A is 2 m/s downward, determine the velocity of B at the instant θ= 45°. The collar C in Fig. is moving downward with a velocity of 2 m/s. Determine the angular velocity of CB at this instant. 16-61. The rotation of link AB creates an oscillating movement of gear F If AB has an angular velocity of 6 rad/s, determine the angular velocity of gear F at the instant shown. Gear E is rigidly attached to arm CD and pinned at D to a fixed point. 16-68. If bar AB has an angular velocity 4 rad/s, determine the velocity of the slider block C at the instant shown. 16-73. If link AB has an angular velocity of 4 rad/s at the instant shown, determine the velocity of the slider block E at this instant. Also, identify the type of motion of each of the four links.