Brownian Motion and Stochastic Calculus
advertisement

Chapter 4
Brownian Motion and Stochastic Calculus
The modeling of random assets in finance is based on stochastic processes,
which are families (Xt )t∈I of random variables indexed by a time interval I. In
this chapter we present a description of Brownian motion and a construction
of the associated Itô stochastic integral.
4.1 Brownian Motion
We start by recalling the definition of Brownian motion, which is a fundamental example of a stochastic process. The underlying probability space
(Ω, F, P) of Brownian motion can be constructed on the space Ω = C0 (R+ )
of continuous real-valued functions on R+ started at 0.
Definition 4.1. The standard Brownian motion is a stochastic process
(Bt )t∈R+ such that
1. B0 = 0 almost surely,
2. The sample trajectories t 7−→ Bt are continuous, with probability 1.
3. For any finite sequence of times t0 < t1 < · · · < tn , the increments
Bt1 − Bt0 , Bt2 − Bt1 , . . . , Btn − Btn−1
are independent.
4. For any given times 0 ≤ s < t, Bt − Bs has the Gaussian distribution
N (0, t − s) with mean zero and variance t − s.
We refer to Theorem 10.28 of [36] and to Chapter 1 of [95] for the proof of
the existence of Brownian motion as a stochastic process (Bt )t∈R+ satisfying
"
N. Privault
the above Conditions 1-4. See also Problem 4.15 for a construction based on
linear interpolation.
In particular, Condition 4 above implies
IE[Bt − Bs ] = 0
and
Var[Bt − Bs ] = t − s,
0 ≤ s ≤ t,
and we have
Cov(Bs , Bt ) = IE[Bs Bt ]
= IE[Bs (Bt − Bs )] + IE[(Bs )2 ]
= IE[Bs ] IE[Bt − Bs ] + IE[(Bs )2 ]
= s,
hence
0 ≤ s ≤ t,
Cov(Bs , Bt ) = IE[Bs Bt ] = min(s, t),
s, t ∈ R+ ,
cf. also Exercise 4.1-(d).
In the sequel, the filtration (Ft )t∈R+ will be generated by the Brownian paths
up to time t, in other words we write
Ft = σ(Bs : 0 ≤ s ≤ t),
t ≥ 0.
(4.1)
A random variable F is said to be Ft -measurable if the knowledge of F
depends only on the information known up to time t. As an example, if
t =today,
• the date of the past course exam is Ft -measurable, because it belongs to
the past.
• the date of the next Chinese new year, although it refers to a future event,
is also Ft -measurable because it is known at time t.
• the date of the next typhoon is not Ft -measurable since it is not known
at time t.
• the maturity date T of a European option is Ft -measurable for all t ∈ R+ ,
because it has been determined at time 0.
• the exercise date τ of an American option after time t (see Section 11.4)
is not Ft -measurable because it refers to a future random event.
Property (iii) above shows that Bt − Bs is independent of all Brownian increments taken before time s, i.e.
78
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
(Bt − Bs ) ⊥
⊥ (Bt1 − Bt0 , Bt2 − Bt1 , . . . , Btn − Btn−1 ),
0 ≤ t0 ≤ t1 ≤ · · · ≤ tn ≤ s ≤ t, hence Bt − Bs is also independent of the
whole Brownian history up to time s, hence Bt − Bs is in fact independent
of Fs , s ≥ 0.
As a consequence, Brownian motion is a continuous-time martingale, cf.
also Example 2 page 2, as we have
IE[Bt | Fs ] = IE[Bt − Bs | Fs ] + IE[Bs | Fs ]
= IE[Bt − Bs ] + Bs
= Bs ,
0 ≤ s ≤ t,
because it has centered and independent increments, cf. Section 6.1.
For convenience we will informally regard Brownian motion as a random
walk over infinitesimal time intervals of length ∆t, whose increments
∆Bt := Bt+∆t − Bt ' N (0, ∆t)
over the time interval [t, t+∆t] will be approximated by the Bernoulli random
variable
√
(4.2)
∆Bt = ± ∆t
with equal probabilities (1/2, 1/2).
The choice of the square root in (4.2) is in fact not fortuitous. Indeed, any
choice of ±(∆t)α with a power α > 1/2 would lead to explosion of the process
as dt tends to zero, whereas a power α ∈ (0, 1/2) would lead to a vanishing
process.
Note that we have
IE[∆Bt ] =
1√
1√
∆t −
∆t = 0,
2
2
and
1
1
∆t + ∆t = ∆t.
2
2
According to this representation, the paths of Brownian motion are not differentiable, although they are continuous by Property 2, as we have
√
dBt
± dt
1
'
= ± √ ' ±∞.
(4.3)
dt
dt
dt
Var[∆Bt ] = IE[(∆Bt )2 ] =
After splitting the interval [0, T ] into N intervals
"
79
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
k−1
k
T, T ,
N
N
k = 1, . . . , N,
of length ∆t = T /N with N “large”, and letting
√
√
√
Xk = ± T = ± N ∆t = N ∆Bt
with probabilities (1/2, 1/2) we have Var(Xk ) = T and
√
Xk
∆Bt = √ = ± ∆t
N
is the increment of Bt over ((k − 1)∆t, k∆t], and we get
BT '
X
∆Bt '
0<t<T
X1 + · · · + XN
√
.
N
Hence by the central limit theorem we recover the fact that BT has a centered
Gaussian distribution with variance T , cf. point 4 of the above definition of
Brownian motion. Indeed, the central limit theorem states that given any
sequence (Xk )k≥1 of independent identically distributed centered random
variables with variance σ 2 = Var[Xk ] = T , the normalized sum
X1 + · · · + Xn
√
n
converges (in distribution) to a centered Gaussian random variable N (0, σ 2 )
with variance σ 2 as n goes to infinity. As a consequence, ∆Bt could in fact
be replaced by any centered random variable with variance ∆t in the above
description.
2
1.5
1
Bt
0.5
0
-0.5
-1
-1.5
-2
0
0.2
0.4
0.6
0.8
1
Fig. 4.1: Sample paths of a one-dimensional Brownian motion.
80
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
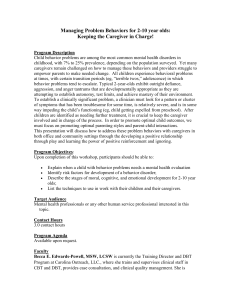
In Figure 4.1 we draw three sample paths of a standard Brownian motion
obtained by computer simulation using (4.2). Note that there is no point
in “computing” the value of Bt as it is a random variable for all t > 0,
however we can generate samples of Bt , which are distributed according to
the centered Gaussian distribution with variance t.
2
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
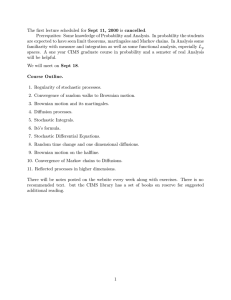
Fig. 4.2: Two sample paths of a two-dimensional Brownian motion.
The n-dimensional Brownian motion can be constructed as (Bt1 , . . . , Btn )t∈R+
where (Bt1 )t∈R+ , . . .,(Btn )t∈R+ are independent copies of (Bt )t∈R+ . Next, we
turn to simulations of 2 dimensional and 3 dimensional Brownian motions in
Figures 4.2 and 4.3. Recall that the movement of pollen particles originally
observed by R. Brown in 1827 was indeed 2-dimensional.
2
1.5
1
0.5
0
-0.5
-2
-1.5
-1
-1
-0.5
-1.5
-2 -2
-1.5
-1
0
0.5
-0.5
0
0.5
1
1.5
1
1.5
2
2
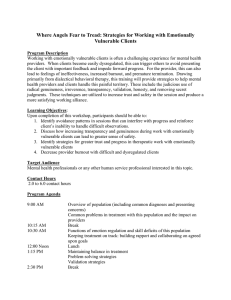
Fig. 4.3: Sample paths of a three-dimensional Brownian motion.
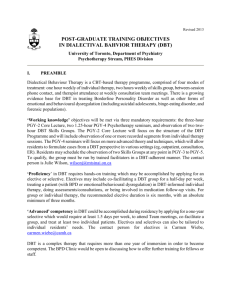
Figure 4.4 presents a construction of Brownian motion by successive linear
interpolations, cf. Problem 4.15.
"
81
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
0.0
0.5
1.0
1.5
n= 12
0.0
0.2
0.4
0.6
0.8
1.0
t
Fig. 4.4: Construction of Brownian motion by linear interpolation.∗
The following R code is used to generate Figure 4.4.
alpha=1/2;t <- 0:1;dt <- 1;z=rnorm(n=1, sd = dt^alpha)
plot(t*dt, c(0, z), xlab = "t", ylab = "", main = "", type = "l", xaxs="i")
k=0;while (k<10)
{readline("Press <return> to continue")
m <- (z+c(0,head(z,-1)))/2
y <- rnorm(n = length(t) - 1, sd = (dt/4)^alpha)
x <- m+y
x <- c(matrix(c(x,z), 2, byrow = T))
n=2*length(t)-2
t <- 0:n
plot(t*dt/2, c(0, x), xlab = "t", ylab = "", main = "", type = "l", xaxs="i")
z=x;dt=dt/2}
The next Figure 4.5 presents an illustration of the scaling property of Brownian motion.
Fig. 4.5: Scaling property of Brownian motion.†
82
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
4.2 Wiener Stochastic Integral
In this section we construct the Itô stochastic integral of square-integrable
deterministic function with respect to Brownian motion.
Recall that Bachelier originally modeled the price St of a risky asset by
St = σBt where σ is a volatility parameter. The stochastic integral
wT
0
f (t)dSt = σ
wT
0
f (t)dBt
can be used to represent the value of a portfolio as a sum of profits and
losses f (t)dSt where dSt represents the stock price variation and f (t) is the
quantity invested in the asset St over the short time interval [t, t + dt].
A naive definition of the stochastic integral with respect to Brownian motion would consist in writing
w∞
0
f (t)dBt =
w∞
0
f (t)
dBt
dt,
dt
and evaluating the above integral with respect to dt. However this definition
fails because the paths of Brownian motion are not differentiable, cf. (4.3).
Next we present Itô’s construction of the stochastic integral with respect to
Brownian motion. Stochastic integrals will be first constructed as integrals
of simple step functions of the form
f (t) =
n
X
ai 1(ti−1 ,ti ] (t),
(4.4)
t ∈ R+ ,
i=1
i.e. the function f takes the value ai on the interval (ti−1 , ti ], i = 1, . . . , n,
with 0 ≤ t0 < · · · < tn , as illustrated in Figure 4.6.
f
6
a2
a1
a4
t0
t1
t2
t3
t4
t
Fig. 4.6: Step function.
Recall that the classical integral of f given in (4.4) is interpreted as the area
under the curve f and computed as
†
The animation works in Acrobat reader on the entire pdf file.
"
83
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
w∞
f (t)dt =
0
n
X
ai (ti − ti−1 ).
i=1
In the next definition we adapt this construction to the setting of stochastic
integration with respect to Brownian motion. The stochastic integral (4.5)
will be interpreted as the sum of profits and losses ai (Bti − Bti−1 ), i =
1, 2, . . . , n, in a portfolio holding a quantity ai of a risky asset whose price
variation is Bti − Bti−1 at time i = 1, 2, . . . , n.
Definition 4.2. The stochastic integral with respect to Brownian motion
(Bt )t∈R+ of the simple step function f of the form (4.4) is defined by
w∞
0
f (t)dBt :=
n
X
ai (Bti − Bti−1 ).
(4.5)
i=1
w∞
In the next Lemma 4.3 we determine the probability distribution of
f (t)dBt
0
and we show that it is independent of the particular representation (4.4) chosen for f (t).
Lemma 4.3.
w ∞Let f be a simple step function f of the form (4.4). The stochastic integral
f (t)dBt defined in (4.5) has a centered Gaussian distribution
0
w∞
0
with mean IE
Var
hw ∞
0
hw ∞
0
w∞
f (t)dBt ' N 0,
|f (t)|2 dt
0
i
f (t)dBt = 0 and variance given by the Itô isometry
w
i
2 w ∞
∞
f (t)dBt = IE
f (t)dBt
=
|f (t)|2 dt.
0
0
(4.6)
Proof. Recall that if X1 , . . . , Xn are independent Gaussian random variables
with probability laws N (m1 , σ12 ), . . . , N (mn , σn2 ) then then sum X1 +· · ·+Xn
is a Gaussian random variable with distribution
N (m1 + · · · + mn , σ12 + · · · + σn2 ).
As a consequence, when f is the simple function
f (t) =
n
X
ai 1(ti−1 ,ti ] (t),
t ∈ R+ ,
i=1
the sum
w∞
0
f (t)dBt =
n
X
ak (Btk − Btk−1 )
k=1
has a centered Gaussian distribution with variance
84
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
n
X
|ak |2 (tk − tk−1 ),
k=1
since
Var [ak (Btk − Btk−1 )] = a2k Var [Btk − Btk−1 ] = a2k (tk − tk−1 ),
hence the stochastic integral
w∞
0
f (t)dBt =
n
X
ak (Btk − Btk−1 )
k=1
of the step function
f (t) =
n
X
ak 1(tk−1 ,tk ] (t)
k=1
has a centered Gaussian distribution with variance
Var
hw ∞
0
n
i X
f (t)dBt =
|ak |2 (tk − tk−1 )
=
k=1
n
X
|ak |2
k=1
=
=
n
w∞X
0
w∞
0
w tk
tk−1
dt
|ak |2 1(tk−1 ,tk ] (t)dt
k=1
|f (t)|2 dt.
Finally we note that
Var
hw ∞
0
w
i
2 hw ∞
i2
∞
f (t)dBt = IE
f (t)dBt
− IE
f (t)dBt
0
0
w
2 ∞
f (t)dBt
.
= IE
0
In the sequel we will make a repeated use of the space L2 (R+ ) of measurable
functions f : R+ −→ R, called square-integrable functions, endowed with the
norm
rw
∞
kf kL2 (R+ ) :=
|f (t)|2 dt < ∞, f ∈ L2 (R+ ),
(4.7)
0
which induces the distance
kf − gkL2 (R+ ) :=
"
rw
∞
0
|f (t) − g(t)|2 dt < ∞,
85
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
between two functions f and g in L2 (R+ ), cf. e.g. Chapter 3 of [98] for details.
Note that the set of simple step functions f of the form (4.4) is a linear
space which is dense in L2 (R+ ) for the norm (4.7), cf. e.g. Theorem 3.13 in
[98], namely, given f a function satisfying (4.7) and (fn )n∈N a sequence of
simple functions converging to f for the norm
rw
∞
kf − fn kL2 (R+ ) :=
0
|f (t) − fn (t)|2 dt
In order to extend the definition (4.5) of the stochastic integral
w∞
0
f (t)dBt
to any function f ∈ L2 (R+ ), i.e. to f : R −→ R measurable such that
w∞
|f (t)|2 dt < ∞,
(4.8)
0
we will make use of the space L2 (Ω) of random variables F : Ω −→ R called
square-integrable random variables, endowed with the norm
p
kF kL2 (Ω×R+ ) := IE[F 2 ] < ∞,
which induces the distance
kF − GkL2 (Ω) :=
p
IE[(F − G)2 ] < ∞,
between the square-integrable random variables F and g in L2 (Ω).
w∞
Proposition 4.4. The definition (4.5) of the stochastic integral
f (t)dBt
0
w∞
can be extended to any function f ∈ L2 (R+ ). In this case,
f (t)dBt has a
0
centered Gaussian distribution
w∞
w∞
f (t)dBt ' N 0,
|f (t)|2 dt
0
with mean IE
Var
hw ∞
0
hw ∞
0
0
i
f (t)dBt = 0 and variance given by the Itô isometry
w
i
2 w ∞
∞
f (t)dBt
=
|f (t)|2 dt.
f (t)dBt = IE
0
0
(4.9)
Proof. The extension of the stochastic integral to all functions satisfying
(4.8) is obtained by density and a Cauchy∗ sequence argument, based on
the isometry relation (4.9). Given f a function satisfying (4.8), consider a
sequence (fn )n∈N of simple functions converging to f in L2 (R+ ), i.e.
rw
lim kf − fn kL2 (R+ ) = lim
n→∞
∗
n→∞
∞
0
|f (t) − fn (t)|2 dt = 0,
See MH3100 Real Analysis I.
86
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
r∞
cf. e.g. Theorem 3.13 in [98]. The isometry (4.9) shows that 0 fn (t)dBt n∈N
is a Cauchy sequence in L2 (Ω) by the triangle inequality∗ for the L2 (Ω)-norm,
as we have
w ∞
w∞
fk (t)dBt −
fn (t)dBt 2
0
0
L (Ω)
s w ∞
2 w∞
= IE
fk (t)dBt −
fn (t)dBt
0
s
=
IE
0
w
∞
0
(fk (t) − fn (t))dBt
2 = kfk − fn kL2 (R+ )
≤ kfk − f kL2 (R+ ) + kf − fn kL2 (R+ ) ,
r∞
which tends to 0 as k and n tend to infinity. Since the sequence 0 fn (t)dBt n∈N
is Cauchy and the space L2 (Ω) is complete,
cf. e.g. Theorem
3.11 in [98] or
w
Chapter 4 of [30], we conclude that
∞
0
fn (t)dBt
n∈N
converges for the
L2 -norm to a limit in L2 (Ω). In this case we let
w∞
w∞
f (t)dBt := lim
fn (t)dBt ,
n→∞
0
0
which also satisfies (4.9) from (4.6) The uniqueness of this limit can then be
shown from (4.9).
w∞
−t
For example,
e dBt has a centered Gaussian distribution with variance
0
w∞
∞
1
1
= .
e−2t dt = − e−2t
0
2
2
0
w∞
Again, the Wiener stochastic integral
f (s)dBs is nothing but a Gaussian
0
random variable and it cannot be “computed” in the way standard integral
are computed via the use of primitives. However, when f ∈ L2 (R+ ) is in
C 1 (R+ ), i.e. when f is continuously differentiable on R+ , we have the following formula
w∞
w∞
f (t)dBt = −
f 0 (t)Bt dt,
(4.10)
0
0
provided that limt→∞ t|f (t)|2 = 0 and f ∈ L2 (R+ ), cf. e.g. Remark 2.5.9 in
[83].
On a finite interval [0, T ] we also have the integration by parts relation
The triangle inequality kfk − fn kL2 (R+ ) ≤ kfk − f kL2 (R+ ) + kf − fn kL2 (R+ ) follows
from the Minkowski inequality.
∗
"
87
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
wT
0
f (t)dBt = f (T )BT −
wT
0
Bt f 0 (t)dt.
(4.11)
4.3 Itô Stochastic Integral
In this section we extend the Wiener stochastic integral to square-integrable
adapted processes. Recall that a process (Xt )t∈R+ is said to be Ft -adapted if
Xt is Ft -measurable for all t ∈ R+ , where the information flow (Ft )t∈R+ has
been defined in (4.1).
Recall, as examples, that
- the process (Bt )t∈R+ is adapted,
- the process (Bt+1 )t∈R+ is not adapted,
- the process (Bt/2 )t∈R+ is adapted,
- the process (B√t )t∈R+ is not adapted.
In other words, a process (Xt )t∈R+ is Ft -adapted if the value of Xt at time t
depends only on information known up to time t. Note that the value of Xt
may still depend on “known” future data, for example a fixed future date in
the calendar, such as a maturity time T > t, as long as its value is known at
time t.
The extension of the stochastic integral to adapted random processes is
actually necessary in order to compute a portfolio value when the portfolio
process is no longer deterministic. This happens in particular when one needs
to update the portfolio allocation based on random events occurring on the
market.
Stochastic integrals of adapted processes will be first constructed as integrals
of simple predictable processes (ut )t∈R+ of the form
ut :=
n
X
Fi 1(ti−1 ,ti ] (t),
t ∈ R+ ,
(4.12)
i=1
where Fi is an Fti−1 -measurable random variable for i = 1, . . . , n. For example, a natural approximation of (Bt )t∈R+ by a simple predictable process can
be constructed as
ut :=
n
X
Bti−1 1(ti−1 ,ti ] (t),
t ∈ R+ ,
i=1
88
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
since Bti−1 is Fti−1 -measurable for i = 1, . . . , n.
The notion of simple predictable process is natural in the context of portfolio investment, in which Fi will represent an investment allocation decided
at time ti−1 and to remain unchanged over the time period (ti−1 , ti ].
By convention, u : Ω × R+ −→ R is denoted in the sequel by ut (ω),
t ∈ R+ , ω ∈ Ω, and the random outcome ω is often dropped for convenience
of notation.
Definition 4.5. The stochastic integral with respect to Brownian motion
(Bt )t∈R+ of any simple predictable process (ut )t∈R+ of the form (4.12) is
defined by
n
w∞
X
ut dBt :=
Fi (Bti − Bti−1 ).
(4.13)
0
i=1
The use of predictability in the definition (4.13) is essential from a financial
point of view, as Fi will represent a portfolio allocation made at time ti−1
and kept constant over the trading interval [ti−1 , ti ], while Bti − Bti−1 represents a change in the underlying asset price over [ti−1 , ti ]. See also the related
discussion on self-financing portfolios in Section 5.2 and Lemma 5.2 on the
use of stochastic integrals to represent the value of a portfolio.
The next proposition gives the extension of the stochastic integral from simple predictable processes to square-integrable Ft -adapted processes (Xt )t∈R+
for which the value of Xt at time t only depends on information contained
in the Brownian path up to time t. This also means that knowing the future
is not permitted in the definition of the Itô integral, for example a portfolio
strategy that would allow the trader to “buy at the lowest” and “sell at the
highest” is not possible as it would require knowledge of future market data.
Note that the difference between Relation (4.14) below and Relation (4.9)
is the expectation on the right hand side.
Proposition 4.6. The stochastic integral with respect to Brownian motion
(Bt )t∈R+ extends to all adapted processes (ut )t∈R+ such that
i
hw ∞
|ut |2 dt < ∞,
IE
0
with the Itô isometry
IE
w
∞
0
ut dBt
2 = IE
hw ∞
0
i
|ut |2 dt .
(4.14)
In addition, the Itô integral of an adapted process (ut )t∈R+ is always a centered random variable:
"
89
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
IE
hw ∞
0
i
us dBs = 0.
(4.15)
Proof. We start by showing that the Itô isometry (4.14) holds for the simple
predictable process u of the form (4.12). We have
!2
w
n
2 X
∞
IE
ut dBt
= IE
Fi (Bti − Bti−1 )
0
i=1
= IE
n
X
Fi Fj (Bti − Bti−1 )(Btj − Btj−1 )
i,j=1
= IE
" n
X
#
|Fi |2 (Bti − Bti−1 )2
i=1
X
+2 IE
Fi Fj (Bti − Bti−1 )(Btj − Btj−1 )
1≤i<j≤n
=
n
X
IE[IE[|Fi |2 (Bti − Bti−1 )2 |Fti−1 ]]
i=1
+2
X
IE[IE[Fi Fj (Bti − Bti−1 )(Btj − Btj−1 )|Ftj−1 ]]
1≤i<j≤n
=
n
X
IE[|Fi |2 IE[(Bti − Bti−1 )2 |Fti−1 ]]
i=1
+2
X
IE[Fi Fj (Bti − Bti−1 ) IE[(Btj − Btj−1 )|Ftj−1 ]]
1≤i<j≤n
=
n
X
IE[|Fi |2 IE[(Bti − Bti−1 )2 ]]
i=1
+2
X
IE[Fi Fj (Bti − Bti−1 ) IE[Btj − Btj−1 ]]
1≤i<j≤n
=
n
X
IE[|Fi |2 (ti − ti−1 )]
i=1
= IE
" n
X
#
|Fi |2 (ti − ti−1 )
i=1
= IE
hw ∞
0
i
|ut |2 dt ,
where we applied the “tower property” (17.36) of conditional expectations
and the facts that Bti − Bti−1 is independent of Fti−1 and
IE[Bti − Bti−1 ] = 0, IE (Bti − Bti−1 )2 = ti − ti−1 , i = 1, . . . , n.
90
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
The extension of the stochastic integral to square-integrable adapted processes (ut )t∈R+ is obtained as in Proposition 4.4 by density and a Cauchy sequence argument using the isometry (4.14), in the same way as in the proof
of Proposition 4.4. Let L2 (Ω × R+ ) denote the space of square-integrable
stochastic processes u : Ω × R+ −→ R such that
hw ∞
i
kuk2L2 (Ω×R+ ) := IE
|ut |2 dt < ∞.
0
By Lemma 1.1 of [56], pages 22 and 46, or Proposition 2.5.3 of [83], the
set of simple predictable processes forms a linear space which is dense in
the subspace L2ad (Ω × R+ ) made of square-integrable adapted processes in
L2 (Ω × R+ ). In other words, given u a square-integrable adapted process
there exists a sequence (un )n∈N of simple predictable processes converging to
u in L2 (Ω × R+ ). Since this sequence
it is Cauchy in L2 (Ω × R+ )
r n converges,
hence by the isometry (4.14),
ut dBt n∈N is a Cauchy sequence in L2 (Ω),
hence it converges in the complete space L2 (Ω). In this case we let
w∞
w∞
ut dBt := lim
unt dBt
n→∞
0
0
and the limit is
unique from (4.14) and satisfies (4.14). The fact that the ranw∞
dom variable
us dBs is centered can be proved first on simple predictable
0
process u of the form (4.12) as
" n
#
hw ∞
i
X
IE
ut dBt = IE
Fi (Bti − Bti−1 )
0
i=1
"
= IE
n
X
#
Fi (Bti − Bti−1 )
i=1
=
=
=
n
X
i=1
n
X
i=1
n
X
IE[IE[Fi (Bti − Bti−1 )|Fti−1 ]]
IE[Fi IE[Bti − Bti−1 |Fti−1 ]]
IE[Fi IE[Bti − Bti−1 ]]
i=1
= 0,
and this identity extends as above from simple predictable processes to
adapted processes u in L2 (Ω × R+ ).
Note also that by bilinearity, the Itô isometry (4.14) can also be written as
hw ∞
i
hw ∞
i
w∞
IE
ut dBt
vt dBt = IE
ut vt dt ,
0
"
0
0
91
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
for all square-integrable adapted processes u, v.
In addition, whenwthe integrand (ut )t∈R+ is not a deterministic function,
∞
the random variable
us dBs no longer has a Gaussian distribution, except
0
in some exceptional cases.
Definite stochastic integral
The definite stochastic integral of u over the interval [a, b] is defined as
wb
a
ut dBt :=
w∞
0
1[a,b] (t)ut dBt ,
with in particular
wb
a
dBt =
w∞
0
1[a,b] (t)dBt = Bb − Ba , 0 ≤ a ≤ b,
We also have the Chasles relation
wc
wb
wc
ut dBt =
ut dBt +
ut dBt ,
a
a
0 ≤ a ≤ b ≤ c,
b
and the stochastic integral has the following linearity property:
w∞
w∞
w∞
(ut + vt )dBt =
ut dBt +
vt dBt ,
u, v ∈ L2 (R+ ).
0
0
0
As an application of the Itô isometry (4.14) we note in particular that
"
2 #
w
w
wT
wT
T
T
T2
.
IE
Bt dBt
= IE
|Bt |2 dt =
IE |Bt |2 dt =
tdt =
0
0
0
0
2
Stochastic modeling of asset returns
In the sequel we will define the return at time t ∈ R+ of the risky asset
(St )t∈R+ as
dSt
= µdt + σdBt ,
St
with µ ∈ R and σ > 0. This equation can be formally rewritten in integral
form as
wT
wT
ST = S0 + µ
St dt + σ
St dBt ,
0
0
hence the need to define an integral with respect to dBt , in addition to the
usual integral with respect to dt. Note that in view of the definition (4.13),
this is a continuous-time extension of the notion portfolio value based on a
92
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
predictable portfolio strategy.
In Proposition 4.6 we have defined the stochastic integral of squareintegrable processes with respect to Brownian motion, thus we have made
sense of the equation
ST = S0 + µ
wT
0
St dt + σ
wT
0
St dBt ,
for (St )t∈R+ an Ft -adapted process, which can be rewritten in differential
notation as
dSt = µSt dt + σSt dBt ,
or
dSt
= µdt + σdBt .
St
(4.16)
This model will be used to represent the random price St of a risky asset
at time t. Here the return dSt /St of the asset is made of two components: a
constant return µdt and a random return σdBt parametrized by the coefficient
σ, called the volatility.
4.4 Stochastic Calculus
Our goal is now to solve Equation (4.16) and for this we will need to introduce
Itô’s calculus in Section 4.4 after reviewing classical deterministic calculus at
the beginning of Section 4.4.
Deterministic calculus
The fundamental theorem of calculus states that for any continuously differentiable (deterministic) function f we have
wx
f (x) = f (0) +
f 0 (y)dy.
0
In differential notation this relation is written as the first order expansion
df (x) = f 0 (x)dx,
(4.17)
where dx is “small”. Higher order expansions can be obtained from Taylor’s
formula, which, letting
df (x) = f (x + dx) − f (x),
states that
1
1
1
df (x) = f 0 (x)dx + f 00 (x)(dx)2 + f 000 (x)(dx)3 + f (4) (x)(dx)4 + · · · .
2
3!
4!
"
93
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
Note that Relation (4.17) can be obtained by neglecting the terms of order
larger than one in Taylor’s formula, since (dx)n << dx when n ≥ 2 and dx
is “small”.
Stochastic calculus
Let us now apply Taylor’s formula to Brownian motion, taking
dBt = Bt+dt − Bt ,
and letting
df (Bt ) = f (Bt+dt ) − f (Bt ),
we have
df (Bt )
1
1
1
= f 0 (Bt )dBt + f 00 (Bt )(dBt )2 + f 000 (Bt )(dBt )3 + f (4) (Bt )(dBt )4 + · · · .
2
3!
4!
From
√ the construction of Brownian motion by its small increments dBt =
± dt, it turns out that the terms in (dt)2 and dtdBt = ±(dt)3/2 can be neglected in Taylor’s formula at the first order of approximation in dt. However,
the term of order two
√
(dBt )2 = (± dt)2 = dt
can no longer be neglected in front of dt.
Simple Itô formula
For f ∈ C 2 (R), Taylor’s formula written at the second order for Brownian
motion reads
1
df (Bt ) = f 0 (Bt )dBt + f 00 (Bt )dt,
2
(4.18)
for “small” dt. Note that writing this formula as
df (Bt )
dBt
1
= f 0 (Bt )
+ f 00 (Bt )
dt
dt
2
does not make sense because the derivative
√
dBt
dt
1
'±
' ± √ ' ±∞
dt
dt
dt
does not exist. Integrating (4.18) on both sides and using the relation
94
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
f (Bt ) − f (B0 ) =
wt
0
df (Bs )
we get the integral form of Itô’s formula for Brownian motion, i.e.
f (Bt ) = f (B0 ) +
wt
0
f 0 (Bs )dBs +
1 w t 00
f (Bs )ds.
2 0
Itô formula for Itô processes
We now turn to the general expression of Itô’s formula which applies to Itô
processes of the form
wt
wt
Xt = X0 +
vs ds +
us dBs ,
t ∈ R+ ,
(4.19)
0
0
or in differential notation
dXt = vt dt + ut dBt ,
where (ut )t∈R+ and (vt )t∈R+ are square-integrable adapted processes.
Given (t, x) 7−→ f (t, x) a smooth function of two variables on R+ ×R, from
∂f
denote partial differentiation with respect to the second
∂x
∂f
denote partial differentiation with respect to the
variable in f (t, x), while
∂t
first (time) variable in f (t, x).
now on we let
Theorem 4.7. (Itô formula for Itô processes). For any Itô process (Xt )t∈R+
of the form (4.19) and any f ∈ C 1,2 (R+ × R) we have
w t ∂f
w t ∂f
f (t, Xt ) = f (0, X0 ) +
vs (s, Xs )ds +
us (s, Xs )dBs
0
0
∂x
∂x
w t ∂f
w
2
1 t
∂ f
|us |2 2 (s, Xs )ds.
+
(s, Xs )ds +
(4.20)
0 ∂s
2 0
∂x
Proof. cf. Theorem II-32, page 71 of [93].
From the relation
wt
0
df (s, Xs ) = f (t, Xt ) − f (0, X0 ),
we can rewrite (4.20) as
wt
0
"
df (s, Xs ) =
wt
0
vs
w t ∂f
∂f
(s, Xs )ds +
us (s, Xs )dBs
0
∂x
∂x
95
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
+
w t ∂f
1wt
∂2f
(s, Xs )ds +
|us |2 2 (s, Xs )ds,
0 ∂s
2 0
∂x
which allows us to rewrite (4.20) in differential notation, as
df (t, Xt )
(4.21)
2
∂f
∂f
∂f
1
2∂ f
(t, Xt )dt,
=
(t, Xt )dt + ut (t, Xt )dBt + vt (t, Xt )dt + |ut |
∂t
∂x
∂x
2
∂x2
or
df (t, Xt ) =
∂f
1
∂2f
∂f
(t, Xt )dt +
(t, Xt )dXt + |ut |2 2 (t, Xt )dt.
∂t
∂x
2
∂x
In case the function x 7−→ f (x) does not depend on the time variable t we
get
df (t, Xt ) = ut
∂f
∂f
1
∂2f
(t, Xt )dBt + vt (t, Xt )dt + |ut |2 2 (t, Xt )dt,
∂x
∂x
2
∂x
and
df (t, Xt ) =
1
∂f
∂2f
(t, Xt )dXt + |ut |2 2 (t, Xt )dt.
∂x
2
∂x
Taking ut = 1 and vt = 0 in (4.19) yields Xt = Bt , in which case the Itô
formula (4.20) reads
f (t, Bt ) = f (0, B0 ) +
w t ∂f
w t ∂f
1 w t ∂2f
(s, Bs )ds +
(s, Bs )dBs +
(s, Bs )ds,
0 ∂x
0 ∂s
2 0 ∂x2
i.e. in differential notation:
df (t, Bt ) =
∂f
∂f
1 ∂2f
(t, Bt )dt +
(t, Bt )dBt +
(t, Bt )dt.
∂t
∂x
2 ∂x2
(4.22)
Itô multiplication table
Next, consider two Itô processes (Xt )t∈R+ and (Yt )t∈R+ written in integral
form as
wt
wt
Xt = X0 +
vs ds +
us dBs ,
t ∈ R+ ,
0
0
and
96
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
Yt = Y0 +
wt
bs ds +
0
wt
0
t ∈ R+ ,
as dBs ,
or in differential notation as
dXt = vt dt + ut dBt ,
and dYt = bt dt + at dBt ,
t ∈ R+ .
The Itô formula also shows that
d(Xt Yt ) = Xt dYt + Yt dXt + dXt · dYt
where the product dXt · dYt is computed according to the Itô rule
dt · dt = 0,
dt · dBt = 0,
dBt · dBt = dt,
(4.23)
i.e.
dXt · dYt = (vt dt + ut dBt ) · (bt dt + at dBt )
= bt vt (dt)2 + bt ut dtdBt + at vt dtdBt + at ut (dBt )2
= at ut dt.
Hence we have
(dXt )2 = (vt dt + ut dBt )2
= (vt )2 (dt)2 + (ut )2 (dBt )2 + 2ut vt (dt · dBt )
= (ut )2 dt,
according to the Itô table
·
dt
dBt
dt
0
0
dBt
0
dt
Table 4.1: Itô multiplication table.
Consequently, (4.21) can also be rewriten as
∂f
∂f
1 ∂2f
(t, Xt )dt +
(t, Xt )dXt +
(t, Xt )(dXt )2
∂t
∂x
2 ∂x2
∂f
∂f
∂f
1
∂2f
=
(t, Xt )dt + vt (t, Xt )dt + ut (t, Xt )dBt + (ut )2 2 (t, Xt )dt.
∂t
∂x
∂x
2
∂x
df (t, Xt ) =
Example
Apply Itô’s formula (4.22) to Bt2 with
Bt2 = f (t, Bt ) and f (t, x) = x2 ,
"
97
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
we get
d(Bt2 ) = df (Bt )
∂f
∂f
1 ∂2f
=
(t, Bt )dt
(t, Bt )dt +
(t, Bt )dBt +
∂t
∂x
2 ∂x2
= 2Bt dBt + dt,
since
∂f
(t, x) = 0,
∂t
∂f
(t, x) = 2x,
∂x
1 ∂2f
(t, x) = 1,
2 ∂x2
and
hence by integration we find
wT
Bs dBs +
wT
wT
Bs dBs =
1
BT2 − T .
2
BT2 = B0 + 2
and
0
0
0
dt = 2
wT
0
Bs dBs + T,
Notation
We close this section with some comments on the practice of Itô’s calculus.
In some finance textbooks, Itô’s formula for e.g. geometric Brownian motion
can be found written in the notation
wT
wT
∂f
∂f
f (T, ST ) = f (0, X0 ) + σ
St
(t, St )dBt + µ
St
(t, St )dt
0
0
∂St
∂St
w T ∂f
w
T
1
∂2f
+
(t, St )dt + σ 2
St2 2 (t, St )dt,
0 ∂t
0
2
∂St
or
df (St ) = σSt
∂f
∂f
1
∂2f
(St )dBt + µSt
(St )dt + σ 2 St2 2 (St )dt.
∂St
∂St
2
∂St
∂f
(St ) can in fact be easily misused in combination with the
∂St
fundamental theorem of classical calculus, and lead to the wrong identity
The notation
df (St ) =
∂f
(St )dSt .
∂St
Similarly, writing
df (Bt ) =
df
1 d2 f
(Bt )dBt +
(Bt )dt
dx
2 dx2
is consistent, while writing
98
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
df (Bt ) =
df (Bt )
1 d2 f (Bt )
dBt +
dt
dBt
2 dBt2
is potentially a source of confusion.
4.5 Geometric Brownian Motion
Our aim in this section is to solve the stochastic differential equation
dSt = µSt dt + σSt dBt
(4.24)
that will defined the price St of a risky asset at time t, where µ ∈ R and
σ > 0. This equation is rewritten in integral form as
wt
wt
St = S0 + µ Ss ds + σ Ss dBs ,
t ∈ R+ .
(4.25)
0
0
It can be solved by applying Itô’s formula to the Itô process (St )t∈R+ as
in (4.19) with vt = µSt and ut = σSt , and by taking f (St ) = log St with
f (x) = log x, which shows that
1
d log St = µSt f 0 (St )dt + σSt f 0 (St )dBt + σ 2 St2 f 00 (St )dt
2
1
= µdt + σdBt − σ 2 dt,
2
hence
log St − log S0 =
wt
d log Sr
0
wt
wt
1
σdBr
=
µ − σ 2 dr +
0
0
2
1
= µ − σ 2 t + σBt ,
t ∈ R+ ,
2
and
St = S0 exp
1
µ − σ 2 t + σBt ,
2
t ∈ R+ .
The above provides a proof of the next proposition.
Proposition 4.8. The solution of (4.24) is given by
St = S0 eµt+σBt −σ
2
t/2
,
t ∈ R+ .
Proof. Let us provide an alternative proof by searching for a solution of the
form
St = f (t, Bt )
"
99
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
where f (t, x) is a function to be determined. By Itô’s formula (4.22) we have
dSt = df (t, Bt ) =
∂f
∂f
1 ∂2f
(t, Bt )dt.
(t, Bt )dt +
(t, Bt )dBt +
∂t
∂x
2 ∂x2
Comparing this expression to (4.24) and identifying the terms in dBt we get
∂f
(t, Bt ) = σSt ,
∂x
1 ∂2f
∂f
(t, Bt ) +
(t, Bt ) = µSt .
∂t
2 ∂x2
Using the relation St = f (t, Bt ), these two equations rewrite as
∂f
(t, Bt ) = σf (t, Bt ),
∂x
∂f
1 ∂2f
(t, Bt ) +
(t, Bt ) = µf (t, Bt ).
∂t
2 ∂x2
Since Bt is a Gaussian random variable taking all possible values in R, the
equations should hold for all x ∈ R, as follows:
∂f
(t, x) = σf (t, x),
(4.28a)
∂x
∂f
1 ∂2f
(t, x) +
(t, x) = µf (t, x).
∂t
2 ∂x2
(4.28b)
To solve (4.28a) we let g(t, x) = log f (t, x) and rewrite (4.28a) as
∂g
∂ log f
1 ∂f
(t, x) =
(t, x) =
(t, x) = σ,
∂x
∂x
f (t, x) ∂x
i.e.
which is solved as
hence
∂g
(t, x) = σ,
∂x
g(t, x) = g(t, 0) + σx,
f (t, x) = eg(t,0) eσx = f (t, 0)eσx .
Plugging back this expression into the second equation (4.28b) yields
100
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
eσx
∂f
1
(t, 0) + σ 2 eσx f (t, 0) = µf (t, 0)eσx ,
∂t
2
i.e.
∂f
(t, 0) = µ − σ 2 /2 f (t, 0).
∂t
∂g
In other words, we have
(t, 0) = µ − σ 2 /2, which yields
∂t
g(t, 0) = g(0, 0) + µ − σ 2 /2 t,
i.e.
f (t, x) = eg(t,x) = eg(t,0)+σx
2
= eg(0,0)+σx+(µ−σ /2)t
= f (0, 0)eσx+(µ−σ
2
/2)t
t ∈ R+ .
,
We conclude that
St = f (t, Bt ) = f (0, 0)eσBt +(µ−σ
2
/2)t
,
and the solution to (4.24) is given by
St = S0 eσBt +(µ−σ
2
/2)t
,
t ∈ R+ .
The next Figure 4.7 presents an illustration of the geometric Brownian process of Proposition 4.8.
4
St
ert
3.5
3
St
2.5
2
1.5
1
0.5
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
t
Fig. 4.7: Geometric Brownian motion started at S0 = 1, with r = 1 and σ 2 = 0.5.∗
"
101
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
Conversely, taking St = f (t, Bt ) with f (t, x) = S0 eσx−σ
Itô’s formula to check that
2
t/2+µt
we may apply
dSt = df (t, Bt )
∂f
∂f
1 ∂2f
(t, Bt )dt
=
(t, Bt )dt +
(t, Bt )dBt +
∂t
∂x
2 ∂x2
2
2
= µ − σ 2 /2 S0 eσBt +(µ−σ /2)t dt + σS0 eσBt +(µ−σ /2)t dBt
2
1
+ σ 2 S0 eσBt +(µ−σ /2)t dt
2
2
2
= µS eσBt +(µ−σ /2)t dt + σS eσBt +(µ−σ /2)t dB
0
t
0
= µSt dt + σSt dBt .
4.6 Stochastic Differential Equations
In addition to geometric Brownian motion there exists a large family of
stochastic differential equations that can be studied, although most of the
time they cannot be explicitly solved. Let now
σ : R+ × Rn −→ Rd ⊗ Rn
where Rd ⊗ Rn denotes the space of d × n matrices, and
b : R+ × Rn −→ R
satisfy the global Lipschitz condition
kσ(t, x) − σ(t, y)k2 + kb(t, x) − b(t, y)k2 ≤ K 2 kx − yk2 ,
t ∈ R+ , x, y ∈ Rn . Then there exists a unique strong solution to the stochastic
differential equation
wt
wt
σ(s, Xs )dBs +
b(s, Xs )ds,
t ∈ R+ ,
Xt = X0 +
0
0
where (Bt )t∈R+ is a d-dimensional Brownian motion, see e.g. [93], Theorem V7.
Next, we consider a few examples of stochastic differential equations that
can be solved explicitly using Itô calculus, in addition to geometric Brownian
motion.
∗
The animation works in Acrobat reader on the entire pdf file.
102
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
Examples
1. Consider the stochastic differential equation
dXt = −αXt dt + σdBt ,
X0 = x0 ,
with α > 0 and σ > 0.
Looking for a solution of the form
wt
Xt = a(t) x0 +
b(s)dBs
0
where a(·) and b(·) are deterministic functions, yields
Xt = x0 e−αt + σ
wt
0
e−α(t−s) dBs ,
t ∈ R+ ,
(4.29)
rt
after applying Theorem 4.7 to the Itô process x0 + 0 b(s)dBs of the form
(4.19) with ut = b(t) and v(t) = 0, and to the function f (t, x) = a(t)x.
Remark: the solution of this equation cannot be written as a function
f (t, Bt ) of t and Bt as in the proof of Proposition 4.8.
2. Consider the stochastic differential equation
dXt = tXt dt + et
2
X0 = x0 .
rt
Looking for a solution of the form Xt = a(t) X0 + 0 b(s)dBs , where
/2
dBt ,
a(·) and b(·) are deterministic functions we get a0 (t)/a(t) = t and
2
2
a(t)b(t) = et /2 , hence a(t) = et /2 and b(t) = 1, which yields Xt =
t2 /2
e
(X0 + Bt ), t ∈ R+ .
3. Consider the stochastic differential equation
dYt = (2µYt + σ 2 )dt + 2σ
p
Yt dBt ,
where µ, σ > 0.
Letting Xt =
√
Yt we have dXt = µXt dt + σdBt , hence
Yt =
"
p
2
wt
eµt Y0 + σ eµ(t−s) dBs .
0
103
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
Exercises
Exercise 4.1 Let (Bt )t∈R+ denote a standard Brownian motion.
a) Let c > 0. Among the following processes, tell which is a standard Brownian motion and which is not. Justify your answer.
(i)
(ii)
(iii)
(iv)
(Bc+t − Bc )t∈R+ .
(cBt/c2 )t∈R+ .
(Bct2 )t∈R+ .
(Bt + Bt/2 )t∈R+ .
b) Compute the stochastic integrals
wT
0
2dBt
wT
and
0
(2 × 1[0,T /2] (t) + 1(T /2,T ] (t))dBt
and determine their probability laws (including mean and variance).
c) Determine the probability law (including mean and variance) of the
stochastic integral
w
2π
0
sin(t) dBt .
d) Compute IE[Bt Bs ] in terms of s, t ≥ 0.
e) Let T > 0. Show that if f is a differentiable function with f (0) = f (T ) = 0
we have
wT
wT
f (t)dBt = −
f 0 (t)Bt dt.
0
0
Hint: Apply Itô’s calculus to t 7→ f (t)Bt .
Exercise 4.2 Consider the price process (St )t∈R+ given by the stochastic
differential equation
dSt = rSt dt + σSt dBt .
Find the stochastic integral decomposition of the random variable ST , i.e.
find the constant C and the process (ζt )t∈[0,T ] such that
ST = C +
wT
0
ζt dBt .
(4.30)
Exercise 4.3 Given T > 0, find a stochastic integral decomposition of BT3 of
the form
wT
ζt dBt ,
(4.31)
BT3 = C +
0
where C ∈ R is a constant and (ζt )t∈[0,T ] is an adapted process to be determined.
104
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
Exercise 4.4 Let f ∈ L2 ([0, T ]). Compute the conditional expectation
h rT
i
0 ≤ t ≤ T,
IE e 0 f (s)dBs Ft ,
where (Ft )t∈[0,T ] denotes the filtration generated by (Bt )t∈[0,T ] .
Exercise 4.5 Let f ∈ L2 ([0, T ]) and consider a standard Brownian motion
(Bt )t∈[0,T ] . Show that the process
w
t
1wt 2
t 7−→ exp
f (s)dBs −
f (s)ds ,
t ∈ [0, T ],
0
2 0
is an (Ft )-martingale, where (Ft )t∈[0,T ] denotes the filtration generated by
(Bt )t∈[0,T ] .
Exercise 4.6 Consider (Bt )t∈R+ a standard Brownian motion generating the
filtration (Ft )t∈R+ and the process (St )t∈R+ defined by
w
wt
t
St = S0 exp
σs dBs +
us ds ,
t ∈ R+ ,
0
0
where (σt )t∈R+ and (ut )t∈R+ are Ft -adapted processes.
a) Compute dSt using Itô calculus.
b) Show that St satisfies a stochastic differential equation to be determined.
Exercise 4.7 Compute the expectation
w
T
IE exp β
Bt dBt
0
for all β < 1/T . Hint: expand (BT ) using Itô’s formula.
2
Exercise 4.8
a) Solve the ordinary differential equation df (t) = cf (t)dt and the stochastic
differential equation dSt = rSt dt + σSt dBt , t ∈ R+ , where r, σ ∈ R are
constants and (Bt )t∈R+ is a standard Brownian motion.
b) Show that
IE[St ] = S0 ert
and
2
Var[St ] = S02 e2rt (eσ t − 1),
t ∈ R+ .
c) Compute d log St .
"
105
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
d) Assume that (Wt )t∈R+ is another standard Brownian motion, correlated
to (Bt )t∈R+ according to the Itô rule dWt · dBt = ρdt, for ρ ∈ [−1, 2],
and consider the solution (Yt )t∈R+ of the stochastic differential equation
dYt = µYt dt + ηYt dWt , t ∈ R+ , where µ, η ∈ R are constants. Compute
f (St , Yt ), for f a C 2 function of R2 .
Exercise 4.9
a) Solve the stochastic differential equation
dXt = −bXt dt + σe−bt dBt ,
t ∈ R+ ,
where (Bt )t∈R+ is a standard Brownian motion and σ, b > 0.
b) Solve the stochastic differential equation
dXt = −bXt dt + σe−at dBt ,
t ∈ R+ ,
where (Bt )t∈R+ is a standard Brownian motion and a, b, σ > 0 are positive
constants.
Exercise 4.10 Given T > 0, let (XtT )t∈[0,T ) denote the solution of the stochastic differential equation
dXtT = σdBt −
XtT
dt,
T −t
t ∈ [0, T ),
(4.32)
under the initial condition X0T = 0 and σ > 0.
a) Show that
XtT = σ(T − t)
wt
0
1
dBs ,
T −s
t ∈ [0, T ).
Hint: start by computing d(XtT /(T − t)) using Itô’s calculus.
b) Show that IE[XtT ] = 0 for all t ∈ [0, T ).
c) Show that Var[XtT ] = σ 2 t(T − t)/T for all t ∈ [0, T ).
d) Show that limt→T XtT = 0 in L2 (Ω). The process (XtT )t∈[0,T ] is called a
Brownian bridge.
Exercise 4.11 Exponential Vasicek model (1). Consider a Vasicek process
(rt )t∈R+ solution of the stochastic differential equation
drt = (a − brt )dt + σdBt ,
t ∈ R+ ,
where (Bt )t∈R+ is a standard Brownian motion and σ, a, b > 0 are positive
constants. Show that the exponential Xt := ert of rt satisfies a stochastic
differential equation of the form
106
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
dXt = Xt (ã − b̃f (Xt ))dt + σg(Xt )dBt ,
where the coefficients ã and b̃ and the functions f (x) and g(x) are to be
determined.
Exercise 4.12 Exponential Vasicek model (2). Consider a short term rate
interest rate proces (rt )t∈R+ in the exponential Vasicek model:
drt = rt (η − a log rt )dt + σrt dBt ,
(4.33)
where η, a, σ are positive parameters.
a) Find the solution (zt )t∈R+ of the stochastic differential equation
dzt = −azt dt + σdBt
as a function of the initial condition z0 , where a and σ are positive parameters.
b) Find the solution (Yt )t∈R+ of the stochastic differential equation
dYt = (θ − aYt )dt + σdBt
(4.34)
as a function of the initial condition Y0 . Hint: let zt = Yt − θ/a.
c) Let xt = eYt , t ∈ R+ . Determine the stochastic differential equation satisfied by (xt )t∈R+ .
d) Find the solution (rt )t∈R+ of (4.33) in terms of the initial condition r0 .
e) Compute the mean∗ IE[rt ] of rt , t ≥ 0.
f) Compute the asymptotic mean limt→∞ IE[rt ].
Exercise 4.13 Cox-Ingerson-Ross model. Consider the equation
√
drt = (α − βrt )dt + σ rt dBt
(4.35)
modeling the variations of a short term interest rate process rt , where α, β, σ
and r0 are positive parameters.
a) Write down the equation (4.35) in integral form.
b) Let u(t) = IE[rt ]. Show, using the integral form of (4.35), that u(t) satisfies
the differential equation
u0 (t) = α − βu(t).
c) By an application of Itô’s formula to rt2 , show that
3/2
drt2 = rt (2α + σ 2 − 2βrt )dt + 2σrt dBt .
(4.36)
α2 /2
One may use the Gaussian moment generating function IE[e ] = e
N (0, α2 ).
∗
"
X
for X '
107
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
d) Using the integral form of (4.36), find a differential equation satisfied by
v(t) = IE[rt2 ].
Exercise 4.14 Let (Bt )t∈R+ denote a standard Brownian motion generating
the filtration (Ft )t∈R+ .
a) Consider the Itô formula
w t ∂f
1 w t 2 ∂2f
∂f
(Xs )dBs + vs (Xs )ds+
u
(Xs )ds,
0
∂x
∂x
2 0 s ∂x2
(4.37)
wt
wt
where Xt = X0 +
us dBs +
vs ds.
f (Xt ) = f (X0 )+
wt
0
us
0
0
Compute St := eXt by the Itô formula (4.37) applied to f (x) = ex and
Xt = σBt + νt, σ > 0, ν ∈ R.
b) Let r > 0. For which value of ν does (St )t∈R+ satisfy the stochastic differential equation
dSt = rSt dt + σSt dBt ?
c) Let the process (St )t∈R+ be defined by St = S0 eσBt +νt , t ∈ R+ . Using the
result of Exercise A.2, show that the conditional probability P(ST > K |
St = x) is given by
log(x/K) + ν(T − t)
√
P(ST > K | St = x) = Φ
,
σ T −t
Hint: use the decomposition ST = St eσ(BT −Bt )+ν(T −t) .
d) Given 0 ≤ t ≤ T and σ > 0, let
X = σ(BT − Bt )
and
η 2 = Var[X],
η > 0.
What is η equal to?
Problem 4.15 The goal of this problem is to prove the existence of standard Brownian motion (Bt )t∈[0,1] as a stochastic process satisfying the four
properties of Definition 4.1, i.e.:
1. B0 = 0 almost surely,
2. The sample trajectories t 7−→ Bt are continuous, with probability 1.
3. For any finite sequence of times t0 < t1 < · · · < tn , the increments
Bt1 − Bt0 , Bt2 − Bt1 , . . . , Btn − Btn−1
are independent.
108
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
4. For any given times 0 ≤ s < t, Bt − Bs has the Gaussian distribution
N (0, t − s) with mean zero and variance t − s.
The construction will proceed by the linear interpolation scheme illustrated
in Figure 4.4. We work on the space C0 ([0, 1]) of continuous functions on [0, 1]
started at 0, with the norm
kf k∞ := max |f (t)|
t∈[0,1]
and the distance
kf − gk∞ := max |f (t) − g(t)|.
t∈[0,1]
The following ten questions are interdependent.
a) Show that for any Gaussian random variable X ' N (0, σ 2 ) we have
2
2
σ
e−ε /(2σ ) ,
P(|X| ≥ ε) ≤ p
ε π/2
ε > 0.
Hint: Start from the inequality IE[(X − ε)+ ] ≥ 0 and compute the lefthand side.
b) Let X and Y be two independent centered Gaussian random variables
with variances α2 and β 2 . Show that the conditional distribution
P(X ∈ dx | X + Y = z)
of X given X + Y = z is Gaussian with mean α2 z/(α2 + β 2 ) and variance
α2 β 2 /(α2 + β 2 ).
Hint: Use the definition
P(X ∈ dx | X + Y = z) :=
P(X ∈ dx and X + Y ∈ dz)
P(X + Y ∈ dz)
and the formulas
P(X ∈ dx) := √
1
2πα2
e−x
2
/(2α2 )
dx,
P(Y ∈ dx) := p
1
2πβ 2
e−x
2
/(2β 2 )
dx,
where dx (resp. dy) represents a “small” interval [x, x + dx] (resp. [y, y +
dy]).
c) Let (Bt )t∈R+ denote a standard Brownian motion and let 0 < u < v. Give
the distribution of B(u+v)/2 given that Bu = x and Bv = y.
Hint: Note that given that Bu = x, the random variable Bv can be written
as
Bv = (Bv − B(u+v)/2 ) + (B(u+v)/2 − Bu ) + x,
(4.38)
"
109
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
and apply the result of Question (b) after identifying X and Y in the
above decomposition (4.38).
d) Consider the random sequences
(0)
(0)
Z = 0, Z1
(0) (1)
(1)
Z = 0, Z1/2 , Z1
Z (2) = 0, Z (2) , Z (1) , Z (2) , Z (0)
1
1/4
1/2
3/4
(3)
(2)
(3)
(1)
(3)
(2)
(3)
(0) Z (3) = 0, Z1/8 , Z1/4 , Z3/8 , Z1/2 , Z5/8 , Z3/4 , Z7/8 , Z1
..
..
.
.
(n)
(n)
(n)
(n)
(n)
Z (n) = 0, Z1/2
n , Z2/2n , Z3/2n , Z4/2n , . . . , Z1
(n+1)
(n)
(n+1)
(n+1)
(n+1)
(n+1)
(n+1) (n+1)
Z
= 0, Z1/2n+1 , Z1/2n , Z3/2n+1 , Z2/2n , Z5/2n+1 , Z3/2n , . . . , Z1
(n)
with Z0
i)
= 0, n ≥ 0, defined recursively as
(0)
Z1
' N (0, 1),
(0)
(0)
Z + Z1
ii)
' 0
+ N (0, 1/4),
2
(1)
(1)
(1)
(0)
Z
+
Z
Z1/2 + Z1
0
1/2
(2)
(2)
iii) Z1/4 '
+ N (0, 1/8), Z3/4 '
+ N (0, 1/8),
2
2
and more generally
(1)
Z1/2
(n)
(n+1)
Z(2k+1)/2n+1 =
(n)
Zk/2n + Z(k+1)/2n
2
+N (0, 1/2n+2 ),
k = 0, 1, . . . , 2n −1,
where N (0, 1/2n+2 ) is an independent centered Gaussian sample with
(n+1)
(n)
variance 1/2n+2 , and Zk/2n := Zk/2n , k = 0, 1, . . . , 2n .
(n) In the sequel we denote by Zt
t∈[0,1]
the continuous-time random path
(n) obtained by linear interpolation of the sequence points in Zk/2n
(0) k=0,1,...,2n
(1) .
Draw a sample of the first four linear interpolations Zt t∈[0,1] , Zt t∈[0,1] ,
(2) (3) (n)
Zt t∈[0,1] , Zt t∈[0,1] , and label the values of Zk/2n on the graphs for
n
k = 0, 1, . . . , 2 and n = 0, 1, 2, 3.
e) Using an induction argument, explain why for all n ≥ 0 the sequence
110
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
(n)
(n)
(n)
(n)
(n) Z (n) = 0, Z1/2n , Z2/2n , Z3/2n , Z4/2n , . . . , Z1
has same distribution as the sequence
B (n) := B0 , B1/2n , B2/2n , B3/2n , B4/2n , . . . , B1 .
Hint: Compare the constructions of Questions (c) and (d) and note that
under the above linear interpolation, we have
(n)
(n)
Z(2k+1)/2n+1 =
(n)
Zk/2n + Z(k+1)/2n
2
,
k = 0, 1, . . . , 2n − 1.
f) Show that for any εn > 0 we have
(n+1)
(n)
P Z (n+1) − Z (n) ∞ ≥ εn ≤ 2n P |Z1/2n+1 − Z1/2n+1 | ≥ εn .
Hint: Use the inequality
P
2n
−1
[
k=0
!
Ak
≤
n
2X
−1
P(Ak )
k=0
for a suitable choice of events (Ak )k=0,1,...,2n −1 .
g) Use the results of Questions (a) and (f) to show that for any εn > 0 we
have
2 n+1
2n/2
P Z (n+1) − Z (n) ∞ ≥ εn ≤ √ e−εn 2 .
εn 2π
h) Taking εn = 2−n/4 , show that
P
∞
X
(n+1)
Z
− Z (n) ∞ < ∞
!
= 1.
n=0
Hint: Show first that
∞
X
P Z (n+1) − Z (n) ∞ ≥ 2−n/4 < ∞,
n=0
and apply the Borel-Cantelli lemma.
n
o
(n) i) Show that with probability one, the sequence Zt t∈[0,1] , n ≥ 1 converges uniformly on [0, 1] to a continuous (random) function (Zt )t∈[0,1] .
Hint: Use the fact that C0 ([0, 1]) is a complete space for the k · k∞ norm.
j) Argue that the limit (Zt )t∈[0,1] is a standard Brownian motion on [0, 1] by
checking the four relevant properties.
"
111
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
Problem 4.16 Consider (Bt )t∈R+ a standard Brownian motion, and for any
n ≥ 1 and T > 0, define the discretized quadratic variation
(n)
QT :=
n
X
(BkT /n − B(k−1)T /n )2 ,
n ≥ 1.
k=1
h
i
(n)
a) Compute IE QT , n ≥ 1.
(n)
b) Compute Var[QT ], n ≥ 1.
c) Show that
(n)
lim QT = T,
n→∞
where the limit is taken in L2 (Ω), that is, show that
(n)
lim kQT − T kL2 (Ω) = 0,
n→∞
where
s
(n)
QT − T L2 (Ω)
IE
:=
(n)
QT − T
2 ,
n ≥ 1.
d) By the result of Question (c), show that the limit
wT
0
Bt dBt := lim
n→∞
n
X
(BkT /n − B(k−1)T /n )B(k−1)T /n
k=1
exists in L2 (Ω), and compute it.
Hint: Use the identity
(x − y)y =
1 2
(x − y 2 − (x − y)2 ),
2
x, y ∈ R.
e) Consider the modified quadratic variation defined by
(n)
Q̃T :=
n
X
(B(k−1/2)T /n − B(k−1)T /n )2 ,
n ≥ 1.
k=1
(n)
Compute the limit limn→∞ Q̃T in L2 (Ω) by repeating the steps of Questions (a)-(c).
f) By the result of Question (e), show that the limit
wT
0
Bt ◦ dBt := lim
n→∞
n
X
(BkT /n − B(k−1)T /n )B(k−1/2)T /n
k=1
112
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"
Brownian Motion and Stochastic Calculus
exists in L2 (Ω), and compute it.
Hint: Use the identities
(x − y)y =
1 2
(x − y 2 − (x − y)2 ),
2
and
1 2
(x − y 2 + (x − y)2 ),
x, y ∈ R.
2
g) More generally, by repeating the steps of Questions (e) and (f), show that
for any α ∈ [0, 1] the limit
(x − y)x =
wT
0
Bt ◦ dα Bt := lim
n→∞
n
X
(BkT /n − B(k−1)T /n )B(k−α)T /n
k=1
exists in L2 (Ω), and compute it.
h) Comparison with deterministic calculus. Compute the limit
lim
n→∞
n
X
k=1
(k − α)
T
n
k
T
T
− (k − 1)
n
n
for all values of α in [0, 1].
Exercise 4.17 Let (Bt )t∈R+ be a standard Brownian motion generating the
information flow (Ft )t∈R+ .
a) Let 0 ≤ t ≤ T . What is the probability law of BT − Bt ?
b) From the answer to Exercise A.4-(b), show that
r
T − t −Bt2 /(2(T −t))
Bt
IE[(BT )+ | Ft ] =
e
+ Bt Φ √
,
2π
T −t
0 ≤ t ≤ T . Hint: write BT = BT − Bt + Bt .
c) Let σ > 0, ν ∈ R, and Xt := σBt + νt, t ∈ R+ . Compute eXt by applying
the Itô formula
wt
w t ∂f
∂f
1 w t 2 ∂2f
(Xs )dBs + vs (Xs )ds +
u
(Xs )ds
0
∂x
∂x
2 0 s ∂x2
wt
wt
vs ds,
to f (x) = ex , where Xt is written as Xt = X0 +
us dBs +
0
0
t ∈ R+ .
d) Let St = eXt , t ∈ R+ , and r > 0. For which value of ν does (St )t∈R+
satisfy the stochastic differential equation
f (Xt ) = f (X0 ) +
0
us
dSt = rSt dt + σSt dBt
"
?
113
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
N. Privault
Exercise 4.18 From the answer to Exercise A.4-(b), show that for any β ∈ R
we have
r
T − t −(β−Bt )2 /(2(T −t))
β − Bt
IE[(β − BT )+ | Ft ] =
e
+ (β − Bt )Φ √
,
2π
T −t
0 ≤ t ≤ T.
Hint: write BT = BT − Bt + Bt .
114
This version: June 23, 2016
http://www.ntu.edu.sg/home/nprivault/indext.html
"