Second-Order RLC Circuit Analysis
advertisement

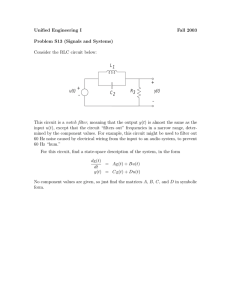
9–1 ECE2205: Circuits and Systems I Second-Order R LC Circuit Analysis • We have examined first-order circuits (RC and RL) in detail in the time domain. • We found that we can also analyze higher-order circuits in the time domain, but the math is tedious. • We then introduced the Laplace transform and showed how circuits can be represented in the Laplace domain. • This chapter of notes focuses on the analysis of second-order RLC circuits using Laplace techniques. • It also shows how time-domain response can be qualitatively understood directly from the Laplace domain, without always needing to perform an inverse Laplace transform. The Series RLC Circuit • We first look at the series RLC circuit, drawn to the right. vr (t) vc (t) vin (t) • In an application, we might want to find vr (t), v L (t), vc (t), and/or i(t). i(t) v L (t) i L (0)/s • Assuming general initial conditions, we redraw the circuit to the right, in the Laplace domain. R Vin (s) c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° Vr (s) a sL VL (s) b vc (0)/s Vc (s) 1 sC 9–2 ECE2205, Second-Order RLC Circuit Analysis • Apply KCL at a: E a (s) − Vin(s) i L (0) E a (s) − E b (s) + + = 0. R s Ls • Apply KCL at b: E b (s) − E a (s) (E b (s) − vc (0)/s) − 0 i L (0) = + . s Ls 1/(sC) • Re-writing in terms of Vc (s) = E b (s), VL (s) = E a (s) − E b (s), and noting E a (s) = Vc (s) + VL (s), ¶ µ 1 Vin(s) i L (0) 1 1 VL (s) = Vc (s) + + − R R Ls R s 1 i L (0) VL (s) = Cvc (0) + . Ls s • This may be written in matrix-vector form: µ ¶ µ ¶ V (s) i (0) 1 1 1 L in " # − + Vc (s) R s R Ls . R ¶ µ = i (0) 1 L VL (s) Cv (0) + sC − c s Ls sC Vc (s) − • Inverting the matrix (thank you, Matlab) R + Ls R " # LCs 2 + RCs + 1 LCs 2 + RCs + 1 Vc (s) = RLCs 2 −Ls VL (s) LCs 2 + RCs + 1 LCs 2 + RCs + 1 Vin(s) i L (0) − R s i L (0) . Cvc (0) + s • Note that we can now solve for Vc (s), VL (s), and/or Vr (s) = Vin(s) − Vc (s) − VL (s) given Vin(s), vc (0), and i L (0). • All terms have a common denominator based on the transfer function 1 H (s) = , LCs 2 + RCs + 1 so we need to spend some time examining this term. c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 9–3 ECE2205, Second-Order RLC Circuit Analysis Second-Order System Response • We can solve for the denominator roots using the quadratic equation: s p µ ¶2 1 R −RC ± (RC)2 − 4(LC) R − =− ± . s1,2 = 2LC 2L 2L LC • There are three possible scenarios for s1,2 based on the radical being +, −, or zero. CASE I : Unique real roots. • When (RC)2 − 4LC > 0, then the circuit has two real roots s1 and s2 and s1 6= s2. • The transfer function has poles s1 and s2 so the natural solution to the circuit has terms of the form £ ¤ yn (t) = k1es1t + k2es2t u(t). • The circuit is said to have an overdamped response. CASE II : Repeated real roots. • When (RC)2 − 4LC = 0, the circuit has two identical roots R s1 = s2 = − . 2L • The natural solution has theh form i R R yn (t) = k1e− 2L t + k2te− 2L t u(t). • The circuit is said to have a critically damped response. CASE III : Complex-conjugate roots. • When (RC)2 − 4LC < 0 the radical produces an imaginary term, so the two roots are complex conjugates of each other s1 = σ + jω c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 9–4 ECE2205, Second-Order RLC Circuit Analysis p s2 = σ − jω, R 4LC − (RC)2 where σ = − and ω = . 2L 2LC • The natural solution is of the form £ (σ + j ω)t ¤ (σ − j ω)t yn (t) = k1e + k2e u(t), where k1 = |k1|e j ψ and k2 = |k1|e− j ψ . That is, k2 = k1∗, and ψ = 6 k1. • This circuit is said to have an underdamped response. • Note that the given form for yn (t) is not as simple as we might like because of the “ j” terms. • We use Euler’s equation to simplify: £ ¤ j ψ σ t j ωt − j ψ σ t − j ωt yn (t) = |k1|e e e + |k1|e e e u(t) ¡ ¢ = |k1|eσ t e j (ωt+ψ) + e− j (ωt+ψ) u(t) = 2|k1|eσ t cos(ωt + ψ)u(t). SUMMARY: The values of R, L, and C determine whether the natural response is overdamped, critically damped, or underdamped. ¡ s1 t ¢ s2 t • s1, s2 real and s1 6= s2: yn (t) = k1e + k2e u(t). ¡ ¢ • s1 = s2: yn (t) = k1es1t + k2tes1t u(t). • s1 = s2∗ = σ + jω: yn (t) = 2|k1|eσ t cos(ωt + 6 k1)u(t). • Note that a pole-zero plot in the s-plane quickly shows qualitative behavior. We explore this in more detail now. Time Response vs. Pole Locations: 1st-Order Pole (stable) • Poles qualitatively determine the behavior of the system. Zeros quantify this relationship. c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 9–5 ECE2205, Second-Order RLC Circuit Analysis • For systems having only real poles, each pole contributes an output waveform of the same general kind, all of which are added together. 1 s ←→ h(t) = e−σ t u(t). s+σ • If σ > 0, pole is at <e(s) < 0, stable i.e., impulse response decays, and any bounded input produces bounded output. EXAMPLE : H (s) = • If σ < 0, pole is at <e(s) > 0, unstable. • σ is “time constant” factor: τ = 1/σ . step([0 1],[1 1]); impulse([0 1],[1 1]); 1 1 0.8 0.8 0.4 0.6 ←− 1 e 0.4 0.2 0 0 K (1 − e−t/τ ) System response. K = DC gain y(t) × K e h(t) 0.6 −σ t Response to initial condition −→ 0. 0.2 1 t =τ 2 3 4 5 0 0 Time (sec × τ ) 1 t =τ 2 3 4 5 Time (sec × τ ) Time Response vs. Pole Locations: 2nd-Order Pole (stable) • For systems having complex-conjugate poles, each pair contributes an output waveform of the same general kind, all of which are added together at the output. • To understand, we write the second-order system in “standard form” ωn2 b0 =K 2 H (s) = 2 s + a1 s + a2 s + 2ζ ωn s + ωn2 ζ = damping ratio. (standard form). ωn = natural frequency or undamped frequency. c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 9–6 ECE2205, Second-Order RLC Circuit Analysis where, −1 θ = sin (ζ ) h(t) = p =m(s) ωn 1 − ζ2 e−σ t (sin(ωd t)) u(t), σ = ζ ωn , p ωd = ωn 1 − ζ 2 = damped frequency. 45 ◦ =m(s) 30 ◦ =m(s) 17.5 ◦ =m(s) ωn σ ωd <e(s) <e(s) <e(s) ζ = 0.707 Impulse Response <e(s) ζ = 0.5 ζ = 0.3 1 h(t) 0.5 e−σ t 0 Envelope of sinusoid decays as e−σ t −e−σ t −0.5 −1 0 5 10 15 20 25 30 Time (sec) Impulse Responses of 2nd-Order Systems 1 Step Responses of 2nd-Order Systems 2 ζ =0 ζ =0 0.2 0.5 0.2 1.5 0.4 0.4 y(t) y(t) 0.6 0 ζ =1 0.8 −0.5 0.6 1 0.8 0.5 1.0 −1 0 2 4 6 ωn t 8 10 12 c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 0 0 2 4 6 ωn t 8 10 12 9–7 ECE2205, Second-Order RLC Circuit Analysis • Low damping, ζ ≈ 0, oscillatory; High damping, ζ ≈ 1, no oscillations. =m(s) =m(s) <e(s) Impulse responses vs. pole locations •0<ζ <1 •ζ =1 <e(s) Step responses vs. pole locations underdamped. critically damped, ζ > 1 overdamped. Time Response vs. Pole Locations: Higher Order Systems • We have looked at first-order and second-order systems without zeros, and with unity gain. Non-unity gain • If we multiply by K , the dc gain is K . tr , ts , M p , t p are not affected. Add a zero to a second-order system 2 (s + 1)(s + 2) 2 2 = − s+1 s +2 H1(s) = • Same dc gain (at s = 0). c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 2(s + 1.1) 1.1(s µ + 1)(s + 2) ¶ 2 0.1 0.9 = + 1.1 s + 1 s + 2 0.18 1.64 = + s+1 s+2 H2(s) = 9–8 ECE2205, Second-Order RLC Circuit Analysis • Coefficient of (s + 1) pole greatly reduced. • General conclusion: a zero “near” a pole tends to cancel the effect of that pole. • How about transient response? H (s) = – Zero at s = −ασ. (s/αζ ωn ) + 1 . (s/ωn )2 + 2ζ s/ωn + 1 – Poles at <e(s) = −σ. • Large α, zero far from poles ➠ no effect. • α ≈ 1, large effect. • Notice that the overshoot goes up as α → 0. 2nd-order system with zero Overshoot versus normalized zero loc. 2 Percent overshoot Step Response 2 1.5 1 α=1 2 4 100 0.5 0 0 2 4 ωn t 6 8 10 1.5 ζ = 0.3 0.5 0.7 1 0.5 0 0 2 4 α • A little more analysis; set ωn = 1 s/αζ + 1 H (s) = 2 s + 2ζ s + 1 1 1 s = 2 + s + 2ζ s + 1 αζ s 2 + 2ζ s + 1 = Ho (s) + Hd (s). • Ho (s) is the original response, without the zero. c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 6 8 10 9–9 ECE2205, Second-Order RLC Circuit Analysis • Hd (s) is the added term due to the zero. Notice that 1 s Ho (s). Hd (s) = αζ The time response is a scaled version of the derivative of the time response of Ho (s). • If any of the zeros in RHP, system is nonminimum phase. 2nd-order min-phase step resp. 2nd-order nonmin-phase step resp. 2 1.5 H (s) 1.5 1 Ho (s) H (s) y(t) y(t) 0.5 1 Ho (s) 0 0.5 −0.5 Hd (s) 0 −1 Hd (s) −0.5 0 2 4 6 8 Time (sec) 10 −1.5 0 2 4 6 Time (sec) 8 10 Add a pole to a second order system 1 . (s/αζ ωn + 1)[(s/ωn )2 + 2ζ s/ωn + 1] • Original poles at <e(s) = −σ = −ζ ωn . New pole at s = −αζ ωn . H (s) = • Major effect is an increase in rise time. Norm. rise time vs. norm. pole loc. 9 1.2 8 7 1 ζ = 1.0 0.7 0.5 6 0.8 0.6 0.4 0.2 0 0 1 2 3 4 ωn t 100 5 2 α=1 5 ωn tr Step Response 2nd-order system with pole 1.4 5 4 3 2 6 7 8 c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 1 0 2 4 α 6 8 10 9–10 ECE2205, Second-Order RLC Circuit Analysis Summary of Higher-Order Approximations • Extra zero in LHP will increase overshoot if the zero is within a factor of ≈ 4 from the real part of complex poles. • Extra zero in RHP depresses overshoot, and may cause step response to start in “wrong direction.” Delay. • Extra pole in LHP increases rise-time if extra pole is within a factor of ≈ 4 from the real part of complex poles. =m(s) Insignificant Dominant Unstable region <e(s) • M ATLAB’s ‘step’ and ‘impulse’ commands can plot higher order system responses. Example (1) of Series RLC Circuit—Find vc (t) (overdamped) • Let vc (0) = 15 V, i L (0) = 0 A, R = 8.5 kÄ, L = 1 H, C = 0.25 µF, vin(t) = Au(t). • From our circuit solution, we know 1 R/s Vc (s) = V (s) − i L (0) in LCs 2 + RCs + 1 LCs 2 + RCs + 1 RL RC + LCs + i (0) + vc (0) L LCs 2 + RCs + 1 LCs 2 + RCs + 1 RC + LCs A + vc (0) = s(LCs 2 + RCs + 1) LCs 2 + RCs + 1 c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° ECE2205, Second-Order RLC Circuit Analysis = A s(0.25 × 10−6s 2 + 2.125 × 10−3s + 1) 15(2.125 × 10−3 + 0.25 × 10−6s) + 0.25 × 10−6s 2 + 2.125 × 10−3s + 1 = V1(s) + V2(s). • The first term has a pole at s = 0 and poles at s1 = −500 and s2 = −8000. (overdamped) • The second term has the overdamped pair of nonzero real poles. • We can take the inverse Laplace transform to find vc (t) using partial-fraction expansion r1 r2 r3 r4 r5 Vc (s) = + + + + s s + 500 s + 8000 s + 500 s + 8000 r1 = sV1(s)|s=0 = A ¯ A/0.25 × 10−6 ¯¯ 16A r2 = (s + 500)V1(s)|s=−500 = =− s(s + 8000) ¯s=−500 15 ¯ A/0.25 × 10−6 ¯¯ A r3 = (s + 8000)V1(s)|s=−8000 = = s(s + 500) ¯s=−8000 15 ¯ 15(8500 + s) ¯¯ r4 = (s + 500)V2(s)|s=−500 = = 16 s + 8000 ¯s=−500 ¯ 15(8500 + s) ¯¯ r5 = (s + 8000)V2(s)|s=−8000 = = −1. ¯ s + 500 s=−8000 • Overall, A 16(1 − A/15) 1 − A/15 + − s s + 500 s + 8000 £ ¤ vc (t) = A + 16(1 − A/15)e−500t − (1 − A/15)e−8000t u(t). Vc (s) = c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 9–11 9–12 ECE2205, Second-Order RLC Circuit Analysis SeriesRLC circuit: Example 1 with A=2 16 14 12 10 vc(t) • Check answer at t = 0 vc (0) = A + 16(1 − A/15) − (1 − A/15) = A − 16A/15 + A/15 + 16 − 1 = 15. 8 6 4 • Result is plotted to the right for A = 2. 2 0 0 0.005 0.01 0.015 Time (sec) 0.02 0.025 Example (2) of Series RLC Circuit—Find vc (t) (critically damped) • Let vc (0) = 15 V, i L (0) = 0 A, R = 4 kÄ, L = 1 H, C = 0.25 µF, vin(t) = 0. • From our circuit solution, with i L (0) and vin(s) substituted, RC + LCs Vc (s) = vc (0) LCs 2 + RCs + 1 1 × 10−3 + 0.25 × 10−6s vc (0) = 0.25 × 10−6s 2 + 1 × 10−3s + 1 4000 + s vc (0). = 2 s + 4000s + 4000000 • The poles are repeated in this case s1 = s2 = −2000. • Partial-fraction expansion is r1 r2 Vc (s) = + (s + 2000)2 s + 2000 ¯ 2 r1 = (s + 2000) Vc (s)¯s=−2000 = (s + 4000)(15)|s=−2000 = 30000 ¯ ¯ · d(s + 4000)(15) ¯¯ d(s + 2000)2 Vc (s) ¯¯ = = 15. r2 = ¯ ¯ ds ds s=−2000 s=−2000 • Therefore, £ ¤ vc (t) = 15e−2000t + 30000te−2000t u(t). c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 9–13 ECE2205, Second-Order RLC Circuit Analysis Series RLC circuit: Example 2 16 14 12 10 c v (t) • Again, we verify that vc (0) = 15, as expected. 8 6 • Result is plotted to the right. 4 2 0 0 0.005 0.01 0.015 Time (sec) 0.02 0.025 0.02 0.025 Example (3) of Series RLC Circuit—Find vc (t) (underdamped) • Let vc (0) = 15 V, i L (0) = 0 A, R = 1 kÄ, L = 1 H, C = 0.25 µF, vin(t) = 0. • From our circuit solution, with i L (0) and vin(s) substituted, RC + LCs vc (0) Vc (s) = LCs 2 + RCs + 1 0.25 × 10−3 + 0.25 × 10−6s vc (0) = 0.25 × 10−6 s 2 + 0.25 × 10−3 s + 1 15s + 15000 = 2 . s + 1000s + 1000000 √ • The poles are s1,2 = −500 ± 500 3 j. So r1 r1∗ Vc (s) = √ + √ , s + 500 + 500 3 j s + 500 − 500 3 j √ − j π/6 and we find r1 = 7.5 − 4.33 j = (5 3)e . Series RLC circuit: Example 3 16 14 • Again, we verify that vc (0) = 15. 12 10 c v (t) • Therefore, √ −500t √ vc (t) = 10 3e cos(500 3t−π/6). 8 6 4 2 0 −2 0 c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° 0.005 0.01 0.015 Time (sec) 9–14 ECE2205, Second-Order RLC Circuit Analysis Parallel RLC Circuit • Another important second-order circuit is the parallel RLC network shown to the right. • Assuming general initial conditions, we redraw the circuit to the right, in the Laplace domain. ir (t) i in (t) R i c (t) vc (0)/s a Iin(s) i L (t) sL i L (0)/s 1 sC • Applying KCL at a: E a (s) − 0 E a (s) − 0 i L (0) (E a (s) − vc (0)/s) − 0 Iin(s) = + + + R Ls s 1/(sC) ¸ · 1 i L (0) 1 + + sC + − Cvc (0) = E a (s) R Ls s · ¸ i L (0) RLs E a (s) = Cvc (0) − + Iin(s) . s RLCs 2 + Ls + R • Given values of R, L, C, i L (0), and i in(t), we can solve this equation. • Note that the denominator is of a different form than the series RLC circuit, but we can still get underdamped, critically damped, and overdamped performance. The Next Step • Having seen first- and second-order systems in the time- and Laplace-domains, we move on to understanding more general systems via the “transfer function”. c 2006, Dr. Gregory L. Plett Lecture notes prepared by & Copyright ° (mostly blank) (mostly blank)