Lecture 17 Second
advertisement

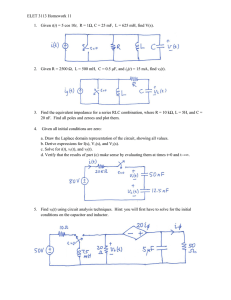
Lecture 17 Second-Order Systems Second-Order System Response (pp.118-125) • For step-by-step derivatives of all second-order system equations, see: http://www.nd.edu/ pdunn/www.text/derivations.pdf • The general expression for a second-order ODE is a2ÿ + a1ẏ + a0y = F (t). (1) • The is a linear second-order ODE that can be rearranged as 1 2ζ ÿ + ẏ + y = KF (t), ωn2 ωn (2) r where ωn = a0/a2 denotes the natural frequency and ζ = √ a1/2 a0a2 damping ratio of the system. • Note that when 2ζ >> 1/ωn, the second derivative term in Equation 2 becomes negligible with respect to the other terms, and the system behavior approaches that of a firstorder system with a system time constant equal to 2ζ/ωn. r r • ωn = 1/LC for a RLC circuit and k/m for a springmass-damper system. r √ • ζ = R/ 4L/C for a RLC circuit and γ/ 4km for a springmass-damper system. 1 • The governing equation for a spring-mass-damper system is m d2y γ dy 1 + + y = F t. k dt2 k dt k • The governing equation for a RLC circuit is dI d2 I dEi(t) LC 2 + RC + I = C . dt dt dt (3) (4) EXAMPLE PROBLEM: Determine the input-output expression for the RLC circuit shown in Figure 1. • Kirchhoff’s voltage law (KVL)can be used to determine the expression that relates the circuit’s output voltage , Eo, to its input voltage, Ei, and the values of R, C, and L. Figure 1: RLC circuit diagram. 2 • Consider the loop from the ground of Ei through R, L, and C back to ground. KVL gives: • Now recall that I = dQ/dt. Substitution gives: which is a linear, second-order ODE. • Now examine another loop from the C’s ground through to Eo’s ground. Application of KVL yields: • So, to find Eo, we must first find Q. Thus, we must integrate the derived second-order ODE. Choose a forcing function of Ei = A sin(ωt). Integration (see the system equation derivations) results in: • Now use the equation involving Eo from the second loop. Substitution gives the final equation: 3 • Finally, examine what happens when L is removed from the circuit. Letting L = 0 in the above solution results in: which is the same as Eqn. 4.38 for the response of a firstorder system to sinusoidal-input forcing. Solutions for Step-Input Forcing • For step-input forcing, there are three specific solutions of the governing ODE. This is because there are three different roots in the characteristic equation 1 2 2ζ r + r + 1 = 0. ωn2 ωn • Application of the quadratic formula simplifies to r r1,2 = −ζωn ± ωn ζ 2 − 1. (5) (6) • Two initial conditions are required to obtain a solution: ẏ = 0 and y(0) = 0. • The exact solution is of the form y(t) = yh + yp where yp = KF (t). 4 • The form of the homogeneous solution, yp, is governed by √ the the value of the discriminant ζ 2 − 1. • When ζ 2 − 1 > 0: the roots are real, negative, and distinct. The general form of the solution is yh(t) = c1er1t + c2er2t. (7) • When ζ 2 − 1 = 0: the roots are real, negative, and equal to −ωn. The general form of the solution is yh(t) = c1ert + c2tert. (8) • When ζ 2 − 1 < 0: the roots are complex and distinct. The general form of the solution is yh(t) = c1er1t + c2er2t = eλt(c1 cos µt + c2 sin µt), (9) using Euler’s formula eit = cos t + i sin t and noting that r1,2 = λ ± iµ, √ with λ = −ζωn and µ = ωn 1 − ζ 2. 5 (10) 2 1.8 ζ=0 1.6 0.2 1.4 0.4 M(t) 1.2 0.6 0.8 1 1.0 1.7 0.8 2.5 0.6 0.4 0.2 0 0 2 4 6 8 10 12 14 ωnt Figure 2: Second-order system response to step-input forcing. • The exact solutions when F (t) = KA are given by Equations (4.57 through (4.60) in the text. • All of the solutions when presented in a nondimensional form can be plotted, as shown in Figure 2. SUGGESTED PROBLEMS: RP4.3, RP4.4, RP 4.9, RP4.20, HP4.8, HP4.10, HP4.14 6