Innovation in PID
Controller Tuning:
A Systematic Approach to Improved Controller
Performance
Standards
Certification
Education & Training
Publishing
Conferences & Exhibits
Robert Rice, PhD
Vice President, Engineering
Control Station, Inc.
Outline of Discussion
• Introduction to Process Control
– Brief history of Process Control
– What is process control, and why do we need it
– Common Examples of Process Control Systems
• Introduction to Process Behavior and the Control Objective
– Why understanding the process is fundamental to controlling it
– The importance of stating the correct control objective
• The PID Controller
– What is a PID Controller
– The importance of controller ‘tuning’
– Examples of the PID controllers (e.g. PID and the PIDE)
• Theory Vs the Real-World
• Questions and Answers
History of Feedback / PID Control
• 300BC – 1200 AD
– Float Regulators used in Water Clocks (ON/OFF Control)
– Used a float to control the inflow of water through a valve; as the level of water fell
the valve opened and replenished the reservoir. This float regulator performed the
same function as the ball and cock in a modern flush toilet.
• 1700 – 1900 : Industrial Revolution
– Centrifugal (Flyball) Governors (P-Only Controller)
– This device employed two pivoted rotating flyballs which were flung outward by
centrifugal force. As the speed of rotation increased, the flyweights swung further
out and up, operating a steam flow throttling valve which slowed the engine down.
Thus, a constant speed was achieved automatically.
• 1900 – Current : Mass Manufacturing
– Pneumatic, Electronic, Model Predictive Controllers
– PID Control
PID Tuning and Optimization
Constraint
Optimization – Moving
Process Close to Constraint
Status Quo– Poor Control
PID Tuning – Improved Control
Reduced Process Variability
A well controlled process has less variability in the measured process
variable (PV), so the process can be operated close to the maximum
profit constraint.
Steps to Successful Controller Design and
Tuning
1.
2.
3.
4.
5.
6.
Identify the Controller and Specify the Design Level of Operation
(DLO) and Control Objective
Perform a “Bump Test” and Collect Dynamic Process Data
Fit a Model to the Process Data
Use Tuning Correlations to Calculate Tunings Based on Model
Implement and Test results
Document the Tuning Process
Good Control is “SIMPLE”
afety
mpact
anagement
rofit
ongevity
quipment
What is the worst thing that can happen if this control loop fails? When
designing your control objective, the safety considerations are
paramount to all others.
Where does this control loop fit in the overall process diagram. Where
do the process disturbances come from? When this process changes,
who gets impacted by it?
If management desires a certain type of performance, it is your job to
match that objective or explain in a logical manner why that type of
control is not possible.
What are the primary economics factors associated with this loop?
How often is this loop the ‘culprit’ when diagnosing process
performance? Keep the control strategy simple, the more complicated
the strategy, the more likely it will fail.
Process equipment is expensive, its components are expensive, and as
such, should be included when formulating your control objective.
Example Process
Reflux Drum – Level Control Example
What is/are the primary Control Objective(s)?
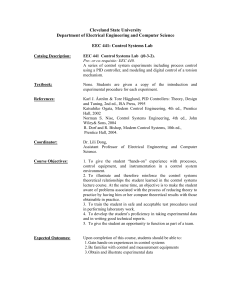
Data Should Show “Cause and Effect”
A bump test must generate a
response that clearly dominates
the random (noisy) PV behavior
Here the PV moves about 4 times
the noise band, a good value
PV = 4%
NB = 1%
NB brackets the PV noise (3) when is CO constant.
Here NB = 1%
CO bump
CO constant
Copyright © 2007 by Control Station, Inc. All Rights Reserved
Copyright © 2007 by Control Station, Inc. All Rights Reserved
8
Good Bumps Tests
Open loop tests require the
controller output to be
stepped
Closed loop tests require a
sharp controller output
change
sharp CO
movement
sharp CO
movement
Bad Bump Tests
AVIOD
Disturbance Driven Data
Slow Ramp CO Changes
• Bump test data must contain
reasonably pure CO to PV
information so the model will
accurately describe the
cause-and-effect relationship
10
Types of Process Behavior
• Self-Regulating
– If all inputs & outputs are
held constant, the process
will seek a steady-state
– Ex: Heat Exchanger
• Non Self-Regulating
– Process will only reach a
steady-state at its ‘balancing’
point
– Ex: Surge Tank
First Order Models for Modeling
Self-Regulating
Non Self-Regulating
“All models are wrong, some are useful”
George Box
12
First Order Plus Deadtime
Self-Regulating Model
13
First Order Plus Deadtime
Non Self-Regulating Model
14
Tunings Only As Good as the Model
• By Hand Approach Sufficient for Simplest of Controllers
• Software Modeling Much More Robust
– Handle Open/Close Loop
– Noisy / Non-Steady State Conditions
SIMPLE
15
PI Tuning Correlations (IMC)
Dependent PI, Self-Regulating Process
1
CO KC E E
TI
PID Tuning Correlations (IMC)
Dependent PID, Self-Regulating Process
1
dPV
CO KC E E TD
T
dt
I
PID Tuning Correlations (IMC)
Dependent PI, Non Self-Regulating Process
1
CO KC E E
TI
Closed Loop Time Constant Selection
Rules of Thumb
19
Expected PI Controller Response
Self-Regulating Processes
Conservative
Moderate
Aggressive
Copyright © 2007 by Control Station, Inc. All Rights Reserved.
• Set point tracking (servo) response as tc changes
Challenges of PI Control
Interaction Self-Regulating Processes
Kc*2
2 Kc
Base Case Performance
Kc
Kc
Kc/2
Kc/2
t ITi/2
/2
tTiI
Copyright © 2007 by Control Station, Inc. All Rights Reserved.
22Ti
tI
Challenges of PI Control
Interaction Non Self-Regulating Processes
2*Kc
Kc
Kc / 2
Ti/2
Ti
2Ti
PI vs PID Set Point Tracking Response
Heat Exchanger – Aggressive Tuning
SP
PI
PID
Copyright © 2007 by Control Station, Inc. All Rights Reserved.
• PID shows decreased oscillations compared to PI performance
• PID has somewhat:
–
–
–
Shorter Rise Time
Faster Settling Time
Smaller Overshoot
Example Process: Heat Exchanger
• Process Variable (PV)
• Set Point (SP)
• Controller Output (CO)
• Disturbances (D)
D
CO
PV
SP
Processes Have Time Varying Behavior
Heat Exchanger Shows Nonlinear
Behavior
equal SP steps
PV response varies with
a fixed-tuning PI controller
Copyright © 2007 by Control Station, Inc. All Rights Reserved
• Processes often exhibit changing (or nonlinear) behavior as
operating level changes
• As a result, “best” tuning can change if the set point moves the
PV across a range of operation
Controller’s Robust Stability
• What does it mean for a controller to be Robustly Stable?
– Controller Robustness measures the Ability to Tolerate Variations in
Process Behavior (e.g., Nonlinearity)
• Visual Robust Stability Plot
Actual Process Gain Increases
– Plots Plant-Model Mismatch in Gain vs. Plant-Model Mismatch in Dead
Time
– Stable and Unstable Regions shown on Plot
Moderately Tuned
Aggressively Tuned
UNSTABLE
UNSTABLE
STABLE
Actual Deadtime Increases
STABLE
Summary
• First Order Models provide Important Information
– How Far?; How Fast?; With How Much Delay?
– Fit by Hand or Use Software
• Systematic Approach to Tune PID Controllers
– Internal Model Control (IMC) Tuning
– Uses the FOPDT Model in the Tuning Correlation
– Specifying the Single Adjustable Tuning Parameter, tc
– Decrease tc for a Faster, More Aggressive Response
– Increase tc to Increase Robustness
• Understanding Robust Stability
– Processes Change over time and with Operating Level
– Controller Performance can degrade over time
– Select Tunings which balance performance with robust stability
Questions?
• Thank you for attending!
• Contact Information:
Bob Rice, PhD
Vice President, Engineering
+1-860-872-2920, ext. 1601
+1-860-420-7158 (m)
bob.rice@controlstation.com