Transient Stability Enhancement of Single Machine Infinite Bus (SMIB)
advertisement
")
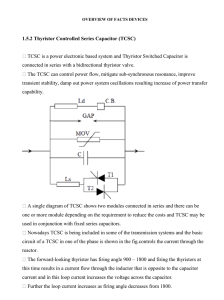
Canadian Journal of Basic and Applied Sciences ©PEARL publication, 2015 ISSN 2292-3381 CJBAS Vol. 03(02), 67-77, February 2015 Transient Stability Enhancement of Single Machine Infinite Bus (SMIB) System using TCSC based Controller Neha Maithil a, Rahul Agrawal a, Sourabh Kothari b a b Assistant Professor, Vindhya Institute of Technology & Science, Indore (M.P.), India. Assistant Professor, Chameli Devi Group Of Institutions, Indore (M.P.), India. Keywords: Abstract Transient Stability, Single Machine Infinite Bus (SMIB) System, FACTS, Power System Stabilizer (PSS), TCSC Controller In present scenario, the major concern of the power engineers is to increase the power transfer capability of the existing system and power system stability for increasing system performance and reliable operation. This led to the development of FACTS technology. FACTS controllers enhance power transfer capability as well as power system stability. This paper presents modeling and simulation of single machine infinite bus (SMIB) system with PSS incorporated with TCSC controller. Thyristor Controlled Series Capacitor (TCSC) controller is used to improve transient stability of the SMIB system. Design of PSS and TCSC controller is proposed. The model of SMIB with both PSS and TCSC is developed in MATLAB for simulation purpose. Three phase symmetrical faults are introduced in the study. The simulation results show that the stability of the power system is being improved by TCSC controller and it effectively damp out the power system oscillations. Nomenclature ∆ωr dB Sm Smo H D d / dt Tm Te Pm Pe Efd Eb T’do T’qo Xd X’d Xq X’q Efdo Xc Rotor angle deviation of synchronous generator in radians Rotor speed deviation in radian / sec Generator Slip in per unit Initial operating slip in p.u. Inertia constant Damping co-efficient Differential operator Mechanical torque input in N-M Electrical torque in N-M Mechanical power input to the generator Electrical power output of the generator Excitation system voltage in per unit Voltage of infinite bus in per unit Open circuit d-axis time constant in second Open circuit q-axis time constant in second d-axis synchronous reactance in p.u. d-axis transient reactance in p.u. q-axis synchronous reactance in p.u. q-axis transient reactance in p.u Initial value of Efd Nominal reactance of the fixed capacitor C Corresponding Author : E-mail, nehamaithil@gmail.com – Tel, (+91) 9826173619 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 Xp σ α k Ke Te XTCSC XL Inductive reactance of inductor L connected in parallel with C Conduction angle of TCSC Firing angle of TCSC Compensation ratio Exciter Gain Time Constant of Exciter Reactance of TCSC Reactance of Transmission Line 1. Introduction Modern power systems, are growing in size and complexity, are characterized by long distance bulk power transmissions and wide area interconnections. To meet the load demand and satisfy the reliability and stability criteria in a complex modern interconnected power system, either it is required to utilize the existing transmission lines more efficiently, or newly constructed lines should be added to the system. With the increase of electric power demand, the power stations are remotely located in dispersed areas. Therefore, it has become inescapable to establish new long transmission lines and using new technologies. On the other hand, this scheme is very expensive and environmental issues should be considered. One of the solutions to this problem is the utilization of the existing transmission lines more effectively and with a higher loading capacity. To realize a smart and fault tolerant grid a new technology Flexible AC transmission system (FACTS) was proposed. FACTS devices are solid state converters that have the capability of controlling various electrical parameters in transmission circuits. The devices of FACTS family such as Thyristor controlled series compensator (TCSC), static synchronous series compensator (SSSC), Static VAR Compensator (SVC), Thyristor controlled phase angle regulator (TCPST), Static compensator (STATCOM), Unified power flow controller (UPFC) etc [4, 8]. FACTS devices can be connected to a transmission line in various ways, such as in the series, shunt or a combination of series and shunt. Today the stability of power system has been become a major concern in system operation. Several disturbances involve a large excursion of generator rotor angles, power flows, bus voltages and other system variables. In recent years, considerable efforts have been made to improve or enhance the power system stability [1, 2, 8]. Fast acting, high gain Automatic Voltage Regulators (AVR) are being employed to the synchronous generators to maintain the distantly located interconnected power systems at constant operating voltage. Though AVRs can enhance the overall transient stability, they are responsible for low frequency generator rotor angle oscillations (0.1-3 Hz). They may further grow in magnitude affecting the small signal stability. In order to produce positive damping on these small frequency oscillations, Power System Stabilizers (PSS) are employed [14]. The purpose of the PSS is to introduce supplementary signals in the feedback loop 68 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 of the voltage regulator. To damp the power system oscillations, PSS controllers are used [15]. But in the same cases the PSS are not able to suitably damp inter-area oscillations modes. In such cases, the simultaneous use of both controller types (PSS and FACTS damping controllers) is required to guarantee a good closed loop system performance. This paper proposes a design of PSS and TCSC supplementary damping controllers. With the advent of FACTS devices, the model of SMIB power system is incorporated with FACTS controllers. 2. Test Power System (SMIB System with TCSC) This paper focuses attention on the single machine infinite bus (SMIB) power systems. Since SMIB system is relatively simple to study, it is extremely useful in describing the general concepts of power system stability, the influence of various factors upon stability, and alternative controller concepts. The SMIB installed with TCSC is shown in figure 1. Vt and Eb are the generator terminal and infinite bus voltage respectively. XT, XL and XTH represent the reactance of the transformer, transmission line per circuit and the Thevenin’s impedance of the receiving end system respectively. Figure 1. SMIB Power system with TCSC. 3. Modeling of Power System Components In this paper, the modeling of power system components includes the modeling of single synchronous generator connected to infinite bus and modeling of excitation system with power system stabilizer (PSS) [11,12]. 3.1 Modeling the Synchronous Generator Infinite-bus Power System This paper presents a dynamic model of synchronous generator represented by model 1.1, i.e. with field circuit and one equivalent damper winding on q-axis. The non-linear equations of machine are given by [9]: d B (Sm - Smo ) dt 69 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 dS m 1 [ D( S m - Smo ) Tm - Te ] dt 2H dE ' q 1 [ E ' q (x d - x' d ) i d E fd ] dt T'do dE ' d 1 [ E ' d (x q - x' q ) i q ] dt T'qo The electrical torque Te is expressed in terms of variables E’d,E' q,id and iq as: Te E' d i d E' q i q (x' d - x' q ) i d iq The stator algebraic equations and the network equations for a lossless network are expressed as: E' q x' d i d v q E' d - x' q i q v d vq - x e i d E b cos vd x e i q - E b sin On solving above equations, the variables id and iq can be obtained as: id iq E b cos - E' q x e x' d E b sin - E' q x e x' q 3.2.Excitation System Modeling with PSS In the paper, the simplified IEEE type-ST1A excitation system is considered shown in figure 2. The inputs of the excitation system are the terminal voltage VT and reference voltage VR. KA and TA represents the gain and time constants of the excitation system respectively [1]. Figure 2. IEEE type ST1A excitation system The method of incorporating these models into a transient stability program by considering the excitation system model shown in figure 3. It represents a bus-fed thyristor excitation system (IEEE type STIA) with an automatic voltage regulator (AVR) and a power system stabilizer (PSS). 70 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 Figure 3. Thyristor excitation system with AVR and PSS Figure 4 shows PSS and IEEE type-ST1A excitation system excluding terminal voltage transducer. Both figures 3 and 4 represent the same system. Figure 4. PSS and IEEE Type-ST1A Excitation system 4. Modeling of TCSC controller structure TCSC is defined as “A capacitive reactance compensator which consists of a series capacitor bank shunted by a thyristor-controlled reactor in order to provide a smoothly variable series capacitive reactance” [4,5,6]. TCSC is most important and best known series controllers which has been employed for many years to enhance power transfer capability of line as well enhance the system stability. The TCSC has three main components: capacitor bank C, bypass inductor L and bidirectional Thyristors T1 and T2 as shown in figure 5. To adjust the reactance of TCSC according to the system control algorithm and to response some system parameter variations, the firing angles of thyristors are controlled. The basic scheme is shown in figure 5. iC and iL are the instantaneous values of the currents in the capacitor banks and inductor, respectively; iS the instantaneous current of the controlled transmission line; v is the instantaneous voltage across the TCSC. 71 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 A Simplified TCSC circuit is shown in figure 6 for the purpose of mathematical analysis. Transmission line current is assumed to be the independent input variable and is represented as a variable current source, iS(t). Here the sinusoidal line current is assumed for the sake of analysis [9]. The equivalent TCSC reactance XTCSC is the ratio of VCF to Im. Figure 5. Basic scheme of TCSC Figure 6. A Simplified TCSC Equivalent Circuit The equivalent TCSC reactance is given by: X TCSC 2 VCF X C 2 sin2 4X 2 C cos 2 (k tan k - tan ) XC Im (X C - XP ) (X C - X P ) (k 2 - 1) Or X TCSC 2 VCF X C sin 4X 2 C cos 2 ( / 2) (k tan(k / 2) - tan( / 2)) XC Im (X C - XP ) (X C - X P ) (k 2 - 1) Where VCF = Fundamental component of the capacitor voltage. XC = Nominal reactance of the fixed capacitor only. XP = Inductive reactance of inductor connected in parallel with fixed capacitor. Β = Angle of advance σ = 2 (π – α), the conduction angle of TCSC The variation of per unit TCSC reactance as a function of firing angle α for different values of the compensation ratio k= √ (XC / XP is accounted. If the value of XC is changed then the maximum value of XTCSC also changes and hence the initial value of compensation can be changed [9]. In this paper, the TCSC controller is assumed to modeled here only as a variable capacitive reactance within the operating region defined by the limits imposed by α [13]. Thus XTCSCmin ≤ XTCSC ≤ XTCSCmax, with XTCSCmax = XTCSC(αmin) and XTCSCmin = XTCSC(180°) = XC. In the capacitive region, i.e., αmin> αr where αr denotes to the resonant point, as the inductive region associated with 90° < α < αr induce high harmonics that cannot be properly modeled in stability studies. 72 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 5. Simulation Results 5.1. SMIB with PSS and without TCSC In this section, the simulation results of SMIB with PSS are discussed (i.e. without including TCSC controller). SMIB with PSS controller presents results under two operating conditions which are explained below. First condition, without three phase fault and second condition, with three phase fault. The three phase fault that we consider here is a dead short circuit of all the three lines not involving the ground. Case 1. Without three phase fault Figure 7 shows the excitation voltage with respect to time. Figure 8 shows the variations in parameters (a) rotor speed deviation (b) output active power (c) voltage stability (d) output reactive power. Figure 9 shows the effect of PSS on (a) load angle (b) rotor angle deviation (c) electric power (d) rotor speed. Figure 7. Excitation voltage of SMIB with PSS without fault Figure 8. SMIB with PSS without fault (a) Rotor speed deviation (b) Output active power(c) Voltage stability (d) Output reactive power Figure 9. SMIB with PSS without fault (a) Load angle (b) Rotor angle deviation (c) Electrical power (d) Rotor speed 73 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 Case 2. With three phase fault This case shows the variations in parameters when we applied symmetrical three phase fault to the SMIB system with PSS controller. The results are shown from figure 10 to figure 12. Figure 10. Excitation voltage of SMIB with PSS with fault Figure 11. SMIB with PSS with fault (a) Rotor speed deviation (b) Output active power(c) Voltage stability (d) Output reactive power Figure 12. SMIB with PSS with fault (a) Load angle (b) Rotor angle deviation (c) Electrical power (d) Rotor speed 5.2. SMIB with PSS and with TCSC Controller To show the advantages of TCSC controller incorporated with PSS in SMIB power system, simulation results are carried out in this section. Same as above, SMIB with TCSC presents results under two cases i.e. with and without three phase fault. Case 1. Without three phase fault Figure 13 shows the excitation voltage with respect to time. Figure 14 shows the variations in parameters (a) rotor speed deviation (b) output active power (c) voltage stability (d) output reactive 74 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 power. Figure 15 shows the effect of TCSC on (a) load angle (b) rotor angle deviation (c) electric power (d) rotor speed. Figure 16 shows the three phase voltage and current of the generator. Figure 13. Excitation voltage of SMIB with PSS- TCSC without fault Figure 14. SMIB with PSS- TCSC without fault (a) Rotor speed deviation (b) Output active power(c) Voltage stability (d) Output reactive power Figure 15. SMIB with PSS-TCSC without fault (a) Load angle (b) Rotor angle deviation(c) Electrical power (d) Rotor speed Figure 16. Three phase voltage and current of generator without fault Case 2. With three phase fault Results are shown in figure 17 to figure 20. 75 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 Figure 17. Excitation voltage of SMIB with PSS- TCSC with fault Figure 18. SMIB with PSS- TCSC with fault (a) Rotor speed deviation (b) Output active power (c) Voltage stability (d) Output reactive power Figure 19. SMIB with PSS-TCSC with fault (a) Load angle (b) Rotor angle deviation (c) Electrical power (d) Rotor speed Figure 20. Three phase voltage and current of generator with fault Various simulation results shown above with and without fault have been explored and results validate the superior performance of the proposed system. Results show that SMIB with both PSS and TCSC controllers is more effective than SMIB with PSS controller only. 6. Conclusion This paper investigates that the FACTS controllers, when equipped with PSS can effectively damp out power system oscillations. This paper deals with modeling and simulation of TCSC controllers for SSR mitigation and enhancing power system stability. A SMIB is considered for this study. Comparative study is done by simulating the simple SMIB system with PSS and then SMIB system is simulated with PSS and TCSC controller both and thus simulations studies are carried out. Simulation results clearly indicate the effect of TCSC in improving transient performance of SMIB 76 Neha Maithil et al. - Can. J. Basic Appl. Sci. Vol. 03(02), 67-77, February 2015 under symmetrical three phase fault. Rotor angle deviation (ω or ωr), electric power (Pe), rotor speed deviation and load angle with PSS-TCSC and without TCSC (i.e. with PSS only) is observed. This observation is helpful to examine stability improvement in both the cases. This work can be extended to multi-machine system by using other types of FACTS controllers like SVC, UPFC etc. Intelligent controllers such as Fuzzy Logic, Neural Network, Hybrid Fuzzy PI based controllers, Big bang controllers etc. can be designed for more effective results. In this study soft computing techniques like GA, PSO may be employed in the future to optimize the parameters of TCSC. References [1] Kundur P.: Power system control and stability. New York: McGraw, (1994). [2] Kothari D., Nagrath I.: Modern Power System Analysis. 2012, Tata McGraw-Hill Publishing Company [3] Hadi S.: Power system analysis, McGraw-Hill (1999). [4] Hingorani N. G., Gyugyi L., El-Hawary M.: Understanding FACTS: concepts and technology of flexible AC transmission systems. Vol. 1. IEEE press New York (2000). [5] Padiyar K.: FACTS controllers in power transmission and distribution, New Age International (2007). [6] John A., Song Y.: Flexible AC Transmission System. IEE Press London, (1999). [7] Zhang X.-P., Rehtanz C., Pal B.: Flexible AC Transmission Systems: Modelling and Control: Modelling and Control, Springer Science & Business Media (2012). [8] Padiyar K.: Power system dynamics, BS publications (2008). [9] Mathur R. M., Varma R. K.: Thyristor-based FACTS controllers for electrical transmission systems, John Wiley & Sons (2002). [10] Wadhwa C.: Electrical Power Systems, 2010. New Age International Publishers, [11] Panda S., Padhy N. P.: MATLAB/SIMULINK based model of single-machine infinite-bus with TCSC for stability studies and tuning employing GA. International Journal of Computer Science and Engineering, 1, 50-59 (2007). [12] Rautray S., Choudhury S., Mishra S., Rout P.: A Particle Swarm Optimization based Approach for Power System Transient Stability Enhancement with TCSC. Procedia Technology, 6, 31-38 (2012). [13] KISHORE V. A., BHARADWAJ D.: IMPROVING POWER SYSTEM STABILITY BY USING THYRISTOR CONTROLLED SERIES CAPACITOR (TCSC) ON A SINGLE MACHINE INFINITE BUS (SMIB). [14] Kundur P., Klein M., Rogers G., Zywno M. S.: Application of power system stabilizers for enhancement of overall system stability. Power Systems, IEEE Transactions on, 4, 614-626 (1989). [15] Zheng X., Xu Z., Zhang J.: A supplementary damping controller of TCSC for mitigating SSR. in Power & Energy Society General Meeting, 2009. PES'09. IEEE. IEEE (2009). 77