Lab 2 - Transient Response of First-Order Systems
advertisement

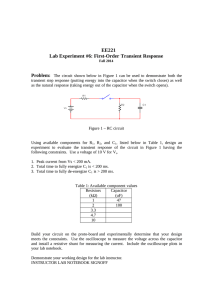
LABORATORY MODULE BIOMEDICAL CONTROL SYSTEM (ENT313/4) SEMESTER 1 (2008/2009) LAB 2: TRANSIENT RESPONSE OF FIRST-ORDER SYSTEMS NAME : ____________________________________________ MATRIC NO. : ____________________________________________ BIOMEDICAL ELECTRONIC ENGINEERING PROGRAM SCHOOL OF MECHATRONIC ENGINEERING UNIVERSITY MALAYSIA PERLIS (UNIMAP) LABORATORY 2 TRANSIENT RESPONSE OF FIRST-ORDER SYSTEMS OBJECTIVES To derive the transfer function for a RC analog filter using the Signal Flow Graph technique. To observe and understand the characteristic of a 1st order system through transient response simulation in MATLAB Simulink. To associate the knowledge of the first-order system with knowledge in analog electronics. INTRODUCTION Consider the following first order system: Y(s) Output, X(s) Input and Plant, G(s); Input X(s) Plant G(s) Output Y(s) Figure 1: A system showing an input and an output This system may represent an RC circuit, thermal or any other equivalent systems. Note that all systems having the same transfer function will exhibit the same output in response to the same input. A standard first order system can be defined by the following. An ordinary differential equation: Transfer function: Where, y(t) : Process output x(t) : Process input : Process time constant K : Process steady-state gain G(s) : Process transfer function The dynamics response, y(t) to a user-specified input x(t), can be found from the inversed Laplace transform of Y(s). The concept of poles and zeros, fundamental to the analysis of and design of control system, simplifies the evaluation of system response. The poles of a transfer function are values of the Laplace Transform variables s, that cause the transfer function to become infinite, or any roots of the denominator of the transfer function that are common to roots of the numerator. Figure 2 shows the (a) block diagram representation of a first order system and (b) its corresponding pole plot. Figure 2: Pole-plot of first order system The movement of pole along the real axis of the system’s s-plane will directly influence its time constant as shown in Figure 3. Figure 3: Effect of a real-axis pole upon transient response The following are the first-order system specifications which are further illustrated in Figure 4: Time constant, The time for e-at to decay 37% of its initial value. Rise time, Tr The time for the waveform to go from 0.1 to 0.9 of its final value. Settling time, Ts The time for the response to reach, and stay within 2% of its final value. Figure 4: First-order response to a unit step PROCEDURES A. Passive RC Circuit 1. Assuming that the resistor R is 1kΩ and capacitor C is 10µF, derive the transfer function G(s) for the RC circuit shown in Figure 5. Also, determine its critical frequency VIn R c. Vc C Figure 5: Passive RC circuit 2. At initial condition, the input voltage Vin is 0V. When a 5V dc voltage is applied at Vin, find the time domain expression for the charging voltage Vc across the capacitor C. Also, identify the forced and natural response from the output expression. 3. From the transfer function G(s), determine the time constant and gain K. 4. Simulate the transient response using MATLAB Simulink and sketch the output waveform. 5. Compare and discuss the result with theoretical expressions obtained earlier. B. Single-Pole Sallen Key Filter R VIn VOut C R1 R2 Figure 6: Single-pole Sallen-Key filter 1. Using the Signal Flow Graph (SFG) method, identify the sub-systems and derive the transfer function G(s) for the circuit shown in Figure 6. 2. Provide the expressions for the time constant , and gain K from the derived transfer function. 3. Assuming that the value of resistor R is 1 kΩ, find the value of the capacitor C if the critical frequency of the system, c is 100 rad/s. 4. Using the R and C values obtained earlier, simulate the circuit’s transient response using MATLAB Simulink for the following R1 to R2 resistor ratios. i) R1 : R 2 = 1 : 1 ii) R1 : R2 = 3 : 2 iii) R1 : R2 = 4 : 1 6. Sketch the observed output and discuss the results in terms of gain K. C. Effect of Poles on First-Order System 1. Simulate transient response for the transfer function derived from Figure 6 using 1kΩ resistor and different capacitor C values. Maintain gain K at 2. i) C = 1 µF ii) C = 10 µF iii) C = 100 µF 2. Sketch and discuss the observed output with relation to the time response and its pole plot. 3. Also, find the rise time Tr and settling time Ts for each of the individual cases. RESULTS & DISCUSSION A. Passive RC Circuit 1. Provide the theoretical derivation of the transfer function G(s) for the circuit shown in Figure 5. 2. Include the relevant calculations to find the critical frequency c of the system. 3. Provide the theoretical derivation of time domain expression for charging voltage Vc across the capacitor C. Also, determine the forced and natural response from the output expression. 4. Determine and explain how the time constant and gain K is obtained. 5. Discuss the observed simulated output with regards to the expressions obtained theoretically. B. Single-Pole Sallen Key Filter 1. Using the Signal Flow Graph (SFG) method, provide the theoretical derivation of the transfer function G(s) for the circuit shown in Figure 6 and identify the sub-systems of the circuit. 2. Provide the expressions for time constant and gain K from the obtained transfer function G(s). 3. Show the relevant calculations to obtain the value of capacitor C at the critical frequency c of 100rad/s. 4. For each of the resistor R1 to R2 ratio, sketch the observed output and discuss the results in terms of gain K. C. Effect of Pole on First-Order System 1. For different capacitor C values, sketch and discuss the observed output and discuss the results in terms of time constant and its pole plot. 2. Also, find the theoretical and simulated rise time Tr and settling time Ts for the individual cases. CONCLUSION Please provide critical conclusions to the laboratory session conducted.