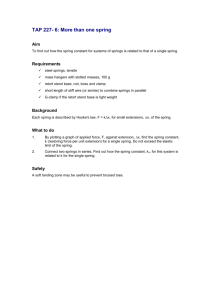
exp 6: springs in series and parallel
advertisement

I. OBJECTIVES 1.1 To study the relationship of springs connected in series and parallel and determine the equivalent spring constant. 1.2 To study the unsymmetric loading of parallel springs II. BACKGROUND Springs are devices that can store and release energy. Because of these properties, springs are very important in engineering. It is therefore essential that engineers understand the different types of spring combinations behave when loaded. Springs can be combined in series, parallel and in a combination of series and parallel. Each spring or spring system can be characterized by its spring constant K. The spring constant can be determined by use of Hooke’s Law: F=K∆ 6.1 Where: F = applied force ∆ = the resulting displacement III. EQUIPMENT 3.1 3.2 3.3 Assorted springs, hooks, and aluminum bars. Steel scale Steel frame R. Ehrgott 2/7 04/07/01 IV. PROCEDURE 4.1 Determine the spring constant for each individual spring using Equation 6.1. When determining the spring constant, be sure the spring has an initial load sufficient to separate the coils and remove the pretension. Determine the deflection due to several loads and take the average value for the spring constant. Excel can also be used to obtain K by fitting a linear trendline to the force-deflection data. K will be the slope m of the trendline (y = mx + b) and b is the initial preload required to separate the coils of the spring. 4.2 Set up the spring system shown in Figure 6.1, 6.2 and 6.3 to determine the equivalent spring constant for each system. 4.3 Construct the spring system shown in Figure 6.4 and determine the equivalent spring constant. You will need to use two pairs of springs with matching spring constants to obtain good results FT = F1 = F2 6.2 K1 ∆ T = ∆1 + ∆ 2 = K2 Keq = F1 F F F + 2 = T + T K1 K 2 K1 K 2 FT FT FT 1 = = = 1 1 ∆ T ∆ 1 + ∆ 2 FT FT + + K1 K 2 K1 K 2 6.3 6.4 FT Figure 6.1 SPRINGS IN SERIES R. Ehrgott 3/7 04/07/01 ∆T = ∆ 1 + ∆ 2 K1 K2 FT = F1 + F2 = K1∆1 + K2 ∆ 2 = K1∆T + K2 ∆T 6.6 FT K 1∆ T + K 2 ∆ T = = K1 + K2 ∆T ∆T 6.7 Keq = ∆1 6.5 ∆2 Location of FT when K1 ≠ K 2 FT a= K1 (a + b ) K1 + K 2 Figure 6.2 SPRINGS IN PARALLEL (∆ ∆1 = ∆2) FT = F1 + F2 K2 K1 ∆1 F1 = ∆2 ∆T = FT a Keq = F2 = a FT L 6.9 b a b F1 a F2 ∆1 + ∆ 2 = + L L L K1 L K 2 b 2 FT a 2 FT + L2 K 1 L2 K 2 6.10 FT FT L2 = 2 = ∆ T b FT a 2 FT b2 a2 + + L2 K 1 L2 K 2 K 1 K 2 6.11 = b L b FT ; L 6.8 Figure 6.3 SPRINGS IN PARALLEL, UNSYMMETRIC CASE (∆ ∆1 ≠ ∆2) R. Ehrgott 4/7 04/07/01 K1 K2 K1 Keq = K3 1 6.12 1 1 + K1 + K2 + K1 K3 + K 3 K3 FT Figure 6.4 SPRINGS IN SERIES AND PARALLEL V. REPORT 5.1 Plot the force versus deflection for each individual spring and report the stiffness for each spring in a table. 5.2 Calculate the theoretical equivalent spring constants given by Equations 6.4, 6.7, 6.11 and 6.12 and compare them to the experimental values determined. Report the results in a table with the percent error referenced to the experimental values. 5.3 Discuss the results and draw appropriate conclusions. SELECTED REFERENCES 6.1 Vibration Analysis, Vierck, pp. 28-31. 6.2 Mark’s Standard Handbook for Mechanical Engineers. 8th Edition. McGraw Hill 6.3 An Introduction to the Mechanics of Solids. Crandall and Dahl. R. Ehrgott 5/7 04/07/01 DATA SHEET EXPERIMENT # 6 SPRINGS IN SERIES AND PARALLEL Student Name ___________________ Group #____________________ Date Exp. Performed _____________ Instructor’s Name____________ SPRING # FORCE READING DEFLECTION PRELOAD K 1 2 3 4 5 6 7 8 R. Ehrgott 6/7 04/07/01 DATA SHEET EXPERIMENT # 6 SPRINGS IN SERIES AND PARALLEL Student Name _____________________ Group #____________________ Date Exp. Performed _____________ Instructor’s Name______________ SPRING SYSTEM FORCE READING DEFLECTION PRELOAD K SERIES PARALLEL BALANCED PARALLEL UNBALANCED SERIES AND PARALLEL R. Ehrgott 7/7 04/07/01