Resonant Augmentation Circuits for a Buck Converter Achieving
advertisement

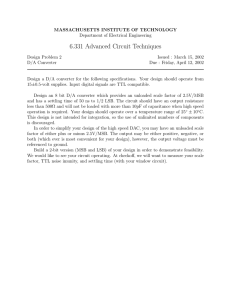
Title Author(s) Citation Issued Date URL Rights Resonant augmentation circuits for a buck converter achieving minimum-time voltage recovery from load transients Shan, ZY; Tan, SC; Tse, CK; Jatskevich, J The 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA., 14-18 September 2014. In Conference Proceedings, 2014, p. 3429-3434 2014 http://hdl.handle.net/10722/210618 IEEE Energy Conversion Congress and Exposition (ECCE) Proceedings. Copyright © IEEE. Resonant Augmentation Circuits for a Buck Converter Achieving Minimum-Time Voltage Recovery from Load Transients ∗ Zhenyu Shan∗, Siew-Chong Tan†, Chi K. Tse‡ and Juri Jatskevich∗ Department of Electrical and Computer Engineering, The University of British Columbia, Vancouver, BC, Canada † Department of Electrical and Electronic Engineering, The University of Hong Kong, Pokfulam, Hong Kong ‡ Department of Electronic and Information Engineering, Hong Kong Polytechnic University, Kowloon, Hong Kong Email: zhenyus@ece.ubc.ca I. I NTRODUCTION Low voltage digital intelligent ICs, e.g., digital signal processors or microprocessors, are widely used in industrial and consumer electronics. To feed high-speed digital electronics loads, high performance power supplies are needed. The power converter needs to track high-slew-rate and large-step load transients to limit voltage deviations within a narrow tolerance band [1]–[3]. The physical limit to the transient response of a traditional buck converter is the internal slew rate of the inductor. While the time-optimal control scheme can push the dynamic performance to its physical limit [4], augmentation circuits [5]–[9] (or auxiliary circuits [10]–[17]) for dc–dc converters have been proposed to break the limit and achieve minimumtime recovery under fast-load-transient conditions. In Fig. 1, the augmentation circuits provide the short-fall charges of the filter capacitor Co while the main converter inductor current is recovering. Therefore, the response of such an augmented converter is better than that of a fixed-topology converter which uses a time-optimal control algorithm. To reduce the converter complexity and the extra space needed, the augmentation circuits and its control stage should be as simple and small as possible. Additionally, the trend of power technology development is moving towards integrating ——————————————————————————————— This project is supported in part by HK RGC GRF grant 5267/12E and PolyU grant GYJ62. 978-1-4799-5776-7/14/$31.00 ©2014 IEEE AugHigh iaA + V i − Vo + − iaB Co io Load iL AugLo Abstract—This paper presents the use of a resonant circuit for fast voltage recovery of power supplies under large-signal load transients. Previous works have shown that an augmentation circuit (or auxiliary circuit) for voltage recovery may be used to improve the dynamic response, while the main converter is operating for current recovery with load current feedforward control. A compact, low cost and magnetic-coreless topology with a simple control algorithm to achieve an augmentation circuit is presented. In the prototype, the inductors are realized using printed copper wires. The control algorithm is realized by a low cost and low density logic device. Simulation and experimental results validate the feasibility and effectiveness of the circuit. Fig. 1. A buck converter with two augmentation circuits (“AugHigh” and “AugLo”) to enhance the dynamic response. the high performance microprocessor together with its power supplies on the same wafer [18]. However, it is still a challenge to implement the augmentation circuits as an IC chip. The reasons are two folds. First, the inductor may be operating in non-resonant mode to regulate the augmentation current. In this circumstance, the inductance value is in hundreds of nH, which is too large for IC implementation. Second, some methods use switches with diverse resistance to achieve current regulation. To enlarge the current regulation range, the number of switches and the space occupied by the circuit will be large, which also hinders IC implementations. A set of resonant auxiliary circuits serving as augmentation branches to achieve minimum-time recovery of a converter is proposed in this paper. The circuit operating in resonant mode with an event driving control algorithm generates unified quasi-sinusoidal pulses. Comparing with previous methods [5]–[17], advantages of the proposed approach are as follows: • The circuit generates unified discontinuous pulses so that the controller is easy to design and realize. • The quasi-sinusoidal current generated by a resonant circuit has lower di/dt than the sharp-edge current generated by a pure-resistive current path. • Small capacitors (μF) and inductors (tens of nH, achieved by stray inductance) are used such that the circuit power stage will occupy a smaller space. 3429 cycle damped sinusoidal current iai . At the end of T1 , vCa rises to VCa1 which is slightly under Vi . During T2 , Sao is on and Ca is discharged, generating a half cycle quasi-sinusoidal current iao . In Cell A, iao is flowing into Co ; in Cell B, iao is flowing out of Co . The levels of VCa2 in Cell A and Cell B are slightly under Vo and Vi − Vo , respectively. From distributed inductance of wires Sai iai + − Vi Sao Ri L Lao Ro ai + + vCa Vo C a − − VCa1 vCa VCa1 VCa2 iao VCa2 Co iai (a) 0 B. Energy Pulses From distributed inductance of wires vCa + − iao Ca Lai Lao Ro Sao+ + Vo Co − Vi − R Sai iai iao 0 Sai ON OFF Sao ON OFF T1 i T2 T1 During T2 , the precise iao can be expressed as T2 (c) (b) Fig. 2. Illustration of the basic cells of the proposed auxiliary circuit: (a) Cell A delivers energy to Co for positive transients; (b) Cell B draws energy out from Co for negative transients; and (c) the normalized waveforms of the two cells. The proposed method takes advantage of a resonant circuit and gives a paradigm shift in the implementation of augmented converter, catered for the power-supplies-on-chip trend. In this work, the small inductors are realized by coreless printed spiral windings (CPSW). II. R ESONANT AUXILIARY C IRCUIT The two basic cells of the proposed auxiliary circuit shown in Fig. 2 function as the two augmentation branches. “Cell A” operates as the high-side branch to mitigate the positive transient; “Cell B” operates as the low-side branch to mitigate the negative transient. Each cell is comprised of three components: two switches Sai and Sao and a capacitor Ca . Additionally, two inductors Lai and Lao are realized using the distributed inductance of wires on a printed circuit board (PCB) or a silicon wafer. In this analysis, the resistance of all conducting components are represented by Ri and Ro . The input voltage source Vi and output capacitor Co of the main converter are shown in Figs. 2(a) and (b), while other elements of the main converter are not shown to avoid cluttering figures. Since capacitance Co is much bigger than Ca , the output voltage Vo of the converter is assumed to be constant when the proposed cells are active. The energy transfer between the cell and Co is achieved in two phases, i.e., T1 (charging phase) and T2 (discharging phase). The normalized waveforms of the two cells are shown in Fig. 2(c). During T1 , Sai is on and Ca is charged by a full = 1 T2 T2 0 − iao dt ≈ C Iaoavg ≈ 2 π Ca (Vi − Vo ). Lao (4) Similarly, the approximate Iaoavg value of Cell B can be derived as A. Overview of Topology and Realization Iaoavg e−αt Vd sin ωd t (0 ≤ t < π/ωd ), (1) Lao ωd √ Ro , ω = ωo2 − α2 , ωo = 1/ Lao Ca and where α = 2L d ao Vd = Vca1 − Vo in Cell A or Vd = Vi − Vca1 + Vo in Cell B. When 4Lao Co (2) Ro 2 √ is satisfied, √ it can be assumed that ωd ≈ ω0 = 1/ Lao Co , and T2 ≈ π Lao Ca . The average value of iao is derived and given as (3). Vd can be approximated as either Vi − Vo in Cell A or Vo in Cell B, as Vca1 ≈ Vi . If Ro is sufficiently small, Iaoavg can be further simplified as iao = 1 π Lao Ca √ a Ro π Lao 2 1+e = 2 π[1 + Ro Ca /(4Lao )] π Iaoavg ≈ 2 π Ca Vo . Lao (5) C. Determination of Parameters of Auxiliary Circuits According to above analysis, the parameters Lao and Ca , determine the Iaoavg value and other properties of the energy pulses. The amount of transferred electrical charge per pulse is constrained by the voltage tolerance, and the duration of the pulses is constrained by switching frequency at which the components can operate. Therefore, the values of Lao and Ca depend on all the factors mentioned above. 1) ΔVo max Determines Ca : The load will change with variable-size steps, while the auxiliary circuit generates fixedamplitude pulses. When the load transient is relatively small, the pulses from the auxiliary circuit may introduce extra voltage ripples on Vo . Therefore, the amount of transferred charge per pulse (denoted as Qao ) must be limited by the tolerance of Vo deviations (assumed to be ΔVo max ), and is given as Δvo = Qao /Co = Iaoavg T2 /Co ≤ ΔVo max , √ Lao Ca e 0 Ca Vd Lao 3430 R ao − 2L o t Ca /Lao Vd sin √ t dt Lao Ca (6) (3) where Vo is assumed to be relatively constant and much larger than Δvo . After substituting Iaoavg by the result of (4) and (5), ΔVo max Co , the derived constraints on Ca for Cell A is Ca ≤ 2(Vi − Vo ) ΔVo max Co . and for Cell B is Ca ≤ 2Vo 2) ΔIo max Determines Lao : To achieve a voltagedeviation-free response to load transients, the current provided by the auxiliary circuit should make up the mismatch between the inductor and the load current [6]. The value of Iaoavg should be determined by the maximum load transient (assumed to be ΔIo max ). The limit on inductance Lao can be derived from Iaoavg ≥ kiao ΔIo max , (7) where kiao is the scaling factor to cope with the error existing in the estimated value of Iaoavg . The factor of C R π a o 1 + e− Lao 2 (8) Ms = π[1 + Ro2 Ca /(4Lao )] Cell A is working P2 does not end P2 TH = −1 Cell B is working TH = 0 P2 does not end TH = 1 Stand by P1 ends P2 ends P1 P2 ends P1 P1 does not end P1 does not end TH = P2 0: vo is inside the allowed band ( Vthl <vo < Vthh ) 1: vo is over the allowed band ( vo ≥ Vthh ) −1: vo is under the allowed band ( vo ≤ Vthl ) Fig. 3. State transition diagram of the proposed resonant augmentation control. should be substituted into (11) and (12) to ensure that the switches are capable of achieving the designed switching speed. in (3) is approximated as 2/π in (4) and (5). In a circuit with a set of general parameters, e.g., Ro = 0.2 Ω, Ca = 2 μF and Lao = 30 nH, the Ms value drops to 0.6/π which is one-third of 2/π. As a result, the values of Iaoavg obtained from (4) and (5) are overestimated. A reasonable kiao should be in the range from 2 to 4 to compensate the overestimation of Iaoavg . Finally, the constraints on Lao in Cell A and Cell B are 2 2(Vi − Vo ) Lao = Ca (9) kiao ΔIo max π Taking advantage of the load feedforward control method, the control loop of main converter and augmentation circuits are simplified for design. The main converter achieves the minimum-time recovery of its inductor current, while the augmentation circuit is facilitating the voltage recovery. As a result, the augmented converter recovers from its load transient in a minimum time. and A. Review of Load Feedforward Control for Main Converter Lao = Ca 2Vo kiao ΔIo max π 2 , (10) respectively. 3) Ro , Ri and Li Effects: In the above guidelines, Ro is not considered. However, the presence of Ro causes errors in (4) or (5) such that the actual Iaoavg is lower than its calculated value. The Iaoavg value should be verified using (3) with the estimated Ro . Normally, Ro of around 100 mΩ is reasonable. The existence of Ri and Lai will limit the magnitude and the slew rate of iai . Values of a few mΩ for Ri and a few nH for Lai are suitable for most applications where Ca is around 1 μF. Particularly, the stray inductance from the connection lines among the elements and the power may achieve a satisfied Lai . In summary, the constraints on Ri , Ro and Lai are not strict, but should be considered. 4) Duration of T1 and T2 : In both cells, the precise duration of T1 and T2 can be calculated by and 2π T1 = 1/(Lai Ca ) − Ri 2 /(4Lai 2 ) (11) π , T2 = 1/(Lao Ca ) − Ro 2 /(4Lao 2 ) (12) respectively. The values of T1/2 are expected to range within the component-switching-time limits. The chosen parameters III. C ONTROL S CHEME FOR AUGMENTED C ONVERTER Peak current with load feedforward control applied to converter with an augmentation scheme has been proposed by Kapat and Krein [5], [6]. This strategy is capable to make the inductor current recover to its steady state from large load transients in minimum time. The load current io feedforward is functioning as the dominant component of the peak current reference. The peak current of iL will refer to ip = io + kp (Vref − Vo ) + ki (Vref − Vo )dt. (13) B. Event Driving Control of Augmentation Circuits The voltage recovery of the system will be achieved by the augmentation that is controlled by a fast non-linear loop, e.g., bang-bang control [5], [6]. Thus, an event driving method is developed for the control of the proposed auxiliary circuit. There is only one threshold to start the circuit actions. Cell A in Fig. 2(a) and the diagram in Fig. 3, for instance, illustrate the approach. The circuit will be standing by unless vo is lower than a fixed threshold (Vthl ). When the circuit enters the P2 state, it will stay there with the switch Sao on until a pre-set time period (T2 ) has elapsed. Then, the circuit will shift to the P1 state with the switch Sai on and remain as it is until the time period (T1 ) has elapsed. The control of Cell B is the same as that of Cell A except for the event (vo becoming higher than Vthh ) to drive the state turning to P2 from a stand-by state. 3431 vo (V) v of traditional converter o 5.1 A. Simulation Results 5 4.9 0 0.05 0.1 0.15 (a) 0.2 0.25 iL 8 io iL / io (A) The simulation is implemented in Matlab/Simulink. The key waveforms in a large time scale is given in Fig. 4. In both cases (with and without the augmentation) the load feedforward control is applied and the the inductor current recovers from large load transients in the minimum time. By using the proposed circuit, the voltage recovery time has been shortened from 100 μs to 10 μs which is approaching the current recovery time. Also the voltage overshoots or dips have been reduced from 90 mV to 30 mV, which is significant. The enlarged waveforms of the output current and capacitor voltage of the two cells are shown in Fig. 5. In discharging phase T2 , one quasi-sinusoidal current pulse is generated by the capacitor Ca discharging through the inductor iao . In charging phase T1 , vCa rises back to the initial level approaching Vi . The circuit operation is repeated cycle by cycle providing the required transient energy. 0.3 10 6 4 0 0.05 0.1 0.15 (b) 0.2 0.25 15 iao (A) two cells are kiao = 3.5, ΔVo max = 0.05 V, Vthl = 4.97 V, Vthh = 5.03 V , Ri ≈ 50 mΩ and Ro ≈ 160 mΩ. vo of converter with the augmentation circuits 5.2 0.3 iao of Cell A 10 i of Cell B ao 5 0 0 0.05 0.1 0.15 (c) t (ms) 0.2 0.25 0.3 B. Prototype and Experimental Results i The schematic diagram of the prototype is shown in Fig. 6. The main converter is a general sync-buck converter. Two auxiliary circuits configured as Cell A and Cell B operate 15 10 iao 5 0 0.05 0.052 0.054 t (ms) 0.056 LaiB iaiB vCa of Cell A ao (A)/ v Ca (V) Fig. 4. The simulated buck converter waveforms of (a) vo , (b) iL , io and (c) iao of the auxiliary circuits during the 5-to-10 A load transients. TaiB CaB LaiA 10 i + − i ao 0.202 0.204 t (ms) 0.206 LaoA Cell B iaoA Cell A TaoA iao CPSW inductor io iL Tm +12 V Ts vCa of Cell B 0.2 TaoB TaiA CaA 15 ao (A)/ v Ca (V) iaiA 0 iaoB 0.058 (a) 5 LaoB Co gate drive 0.208 0~10 A dummy load gate drive (b) R1 R-S Flip-flop + Q R − Fig. 5. Enlarged iao and vCa simulation waveforms in Fig. 4 for (a) Cell A and (b) Cell B. Q S C2 C1 − Σ R2 + Vref IV. S IMULATION AND E XPERIMENTS Clk The simulation and experimental measurements based on a traditional sync-buck converter are performed to verify the proposed method. The parameters of the main converter are Vi = 12 V, Vo = 5 V, fsw = 200 kHz, L = 10 μH and Co = 280 μF. The auxiliary circuit is designed for 5 A load transients. Parameters of Cell A are Lao ≈ 50 nH, Lai ≈ 5 nH and Ca = 0.8 μF, and that of Cell B are Lao ≈ 40 nH, Lai ≈ 5 nH and Ca = 1 μF. Other common parameters of the 3432 Logic devices vcs Load feedforward loop − Event drive control vcs V V + thl Vref thh vo Vref Fig. 6. Schematic of the experimental prototype. the main converter is achieved purely by analog circuits. The proposed event driving control algorithm for the augmented circuits is achieved by a low cost complex programmable logic device (EPM240T100C5) plus analog comparators. Figs. 8 and 9 are the experimental waveforms obtained from the prototype. As it can be seen in these figures, the proposed approach successfully achieves minimum time recovery and suppresses voltage deviations under fast load transients. Some high frequency ripples on vo are observed from the waveforms when the augmentation circuits are operating. This problem can be improved by tuning the switching dead time or adding a small capacitor at the connection line between the augmentation and the filter capacitor bank. /DR% /DR$ &D$ /DL% &D% /DL$ 7DL$ 7DL% Fig. 7. Bottom view of the augmentation circuits built on a four-layer standard PCB. respectively as “AugHigh” and “AugLo” shown in Fig. 1. The components comprising Cell A are denoted as LaiA , LaoA , CaA , TaiA and TaoA and the components comprising Cell B are denoted as LaiB , LaoB , CaB , TaiB and TaoB . The inductor LaoA/B is implemented by a CPSW as shown in Fig. 7. To reduce the parasitic resistance, the windings printed on four copper layers are paralleled. The space ratio of the central hollow and the winding has been optimized according to the principle given in [19]. The control loop of V. C ONCLUSION This work describes the design of a new circuit to achieve minimum-time recovery from fast load dynamics in the framework of an augmented converter. The compact resonant cells that generate fixed-width current pulses are used to handle the voltage recovery. An event driving strategy is developed to control such cells. The experimental results confirm the effectiveness of the proposed methodology. It is further envisioned that the proposed approach may lead to a paradigm shift that the augmentation method based on small inductors are designed together with the main converter on chip. aYR P9GLY aYR P9GLY ǻYR P9 7VHWWOH ȝV ǻYR P9 7VHWWOH ȝV L/ $GLY L/ $GLY 7LPHVFDOHȝVGLY 7LPHVFDOHȝVGLY (a) (b) Fig. 8. Waveforms of the general buck converter under 5 A-size (a) step-up load transients and (b) step-down load transients. ǻYR P9 ǻYR P9 9&D% 9 9&D$ 9 9&D% 9 7VHWWOH ȝV 7VHWWOH ȝV 9&D$ 9 &+Y&D$ 9GLY &+L/ $GLY &+/RDGVWHSVLJQDO &+aYR P9GLY 7LPHVFDOH ȝVGLY &+Y&D% 9GLY &+L/ $GLY (a) &+/RDGVWHSVLJQDO &+aYR P9GLY 7LPHVFDOH ȝVGLY (b) Fig. 9. Waveforms of the augmented buck converter with the proposed resonant circuits and the related load feedforward control under 5 A-size (a) step-up load transients and (b) step-down load transients. 3433 R EFERENCES [1] C. Sreekumar and V. Agarwal, “A hybrid control algorithm for voltage regulation in dc–dc boost converter,” IEEE Trans. Ind. Electron., vol. 55, no. 6, pp. 2530–2538, Jun. 2008. [2] Design guidelines: voltage regulator module (VRM) and enterprise voltage regulator-down (EVRD). http://www.intel.com/assets/PDF/designguide/321736.pdf. Intel Corp. Tech. Rep. 2009. [3] P. S. Shenoy and P. T. Krein, “Power supply aware computing,” in Proc. International Conference on Energy Aware Computing (ICEAC), 2010, pp. 1–4. [4] G. E. Pitel and P. T. Krein, “Minimum-time transient recovery for dc–dc converters using raster control surfaces,” IEEE Trans. Power Electron., vol. 24, no. 12, pp. 2692–2703, Dec. 2009. [5] S. Kapat and P. T. Krein, “Null response to a large signal transient in an augmented dc–dc converter: A geometric approach,” in Proc. IEEE Workshop on Control and Modeling for Power Electronics, 2010, pp. 1–6. [6] S. Kapat, P. S. Shenoy, and P. T. Krein, “Near-null response to large-signal transients in an augmented buck converter: A geometric approach,” IEEE Trans. Power Electron., vol. 27, no. 7, pp. 3319–3329, Jul. 2012. [7] P. T. Krein, “Feasibility of geometric digital controls and augmentation for ultrafast dc–dc converter response,” in Proc. IEEE Comput. in Power Electron., 2006, pp. 48–56. [8] G. E. Pitel and P. T. Krein, “Transient reduction of dc–dc converters via augmentation and geometric control,” in Proc. IEEE Power Electron. Spec. Conf. (PESC), 2007, pp. 1652–1657. [9] P. S. Shenoy, P. T. Krein, and S. Kapat, “Beyond time-optimality: Energy-based control of augmented buck converters for near ideal load transient response,” in Proc. IEEE Applied Power Electron. Conf. Exp. (APEC), 2011, pp. 916–922. [10] O. Abdel-Rahman and I. Batarseh, “Transient response improvement in dc–dc converters using output capacitor current for faster transient [11] [12] [13] [14] [15] [16] [17] [18] [19] 3434 detection,” in Proc. IEEE Power Electron. Spec. Conf. (PESC), 2007, pp. 157–160. Y. Wen and O. Trescases, “Dc–dc converter with digital adaptive slope control in auxiliary phase to achieve optimal transient response,” in Proc. IEEE Applied Power Electron. Conf. Exp. (APEC), 2011, pp. 331–337. E. Meyer, Z. Zhang, and Y.-F. Liu, “Controlled auxiliary circuit to improve the unloading transient response of buck converters,” IEEE Trans. Power Electron., vol. 25, no. 4, pp. 806–819, Apr. 2010. E. Meyer, D. Wang, L. Jia, and Y.-F. Liu, “Digital charge balance controller with an auxiliary circuit for superior unloading transient performance of buck converters,” in Proc. IEEE Applied Power Electron. Conf. Exp. (APEC), 2010, pp. 124–131. Z. Shan, S. C. Tan, and C. K. Tse, “Transient mitigation of dc–dc converters using an auxiliary switching circuit,” in Proc. IEEE Energy Conversion Congress and Exposition (ECCE), 2011, pp. 1259–1264. Z. Shan, S. C. Tan, and C. K. Tse, “Transient mitigation of dc–dc converters for high output current slew rate applications,” IEEE Trans. Power Electron., vol. 28, no. 5, pp. 2377–2388, May 2013. V. Šviković, J. A. Oliver, P. Alou, O. Garcı́a, and J. A. Cobos, “Synchronous buck converter with output impedance correction circuit,” IEEE Trans. Power Electron., vol. 28, no. 7, pp. 3415–3427, 2013. Z. Shan, C. Tse, and S.-C. Tan, “Classification of auxiliary circuit schemes for feeding fast load transients in switching power supplies,” IEEE Trans. Circuits Syst. I, vol. 61, no. 3, pp. 930–942, Mar. 2014. F. Waldron, R. Foley, J. Slowey, A. N. Alderman, B. C. Narveson, and S. C. O. Mathuna, “Technology roadmapping for power supply in package (psip) and power supply on chip (pwrsoc),” IEEE Trans. Power Electron., vol. 28, no. 9, pp. 4137–4145, Sep. 2013. Y. Su, X. Liu, C. K. Lee, and S. Y. Hui, “On the relationship of quality factor and hollow winding structure of coreless printed spiral winding (cpsw) inductor,” IEEE Trans. Power Electron., vol. 27, no. 6, pp. 3050– 3056, Jun. 2012.