J. Electrical Systems 7-3 (2011): 343
advertisement
: 343")
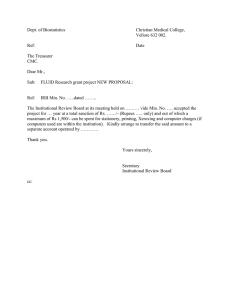
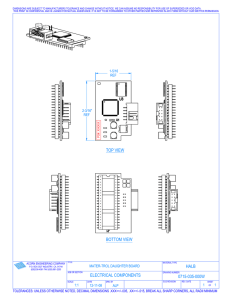
Souhir NOUALI Abderrazak OUALI J. Electrical Systems 7-3 (2011): 343-357 Regular paper Modelling and Control Strategy of a Wind Energy Conversion System based on a Doubly-Fed Twin Stator Induction Generator In this paper, we present a model and a control strategy of new Wind Energy Conversion Systems (WECS) including the wind turbine, the gearbox, the Doubly Fed Twin Stator Induction Generator (DFTSIG) driven by back to back power converters which are connected to the grid via a filter. Between them, a capacitor is placed as a voltage DC bus. This topology is used for great power production. It is characterized by a better exploitation of the kinetic energy of the wind. It allows us to maximize the capturing of energy and to improve quality of the powers forwarded to the grid. Compared to the topology using Doubly Fed Induction generator (DFIG), the new one is more economical since it allows us to reduce maintenance and installation cost. The control device is established by considering a simplified model with the orientation of power machine stator flux. It is decomposed into two parts. The first one is the DFTSIG control. It is vector based on the orientation of the power machine stator flux, and used to maximize energy captured from the wind turbine for each wind speed. The second part is the control of the active and reactive powers injected into the grid via the converters connected to the control machine stator. Simulation results demonstrate the control device excellent performances using Matlab/simulink. Keywords: WECS, DFTSIG, PWM converter, PI controller, vector control, power control. 1. INTRODUCTION Wind energy is the fastest growing energy technology in terms of percentage of yearly growth of installed capacity per technology source [1]. Various types of aero-generators are introduced. Those which have Squirrel cage induction generators are widely used because of their lower cost, reliability, construction and simplicity of maintenance [2] and [3]. But when the aero-generator is directly connected to a grid, which imposes the frequency, the speed must be set to a constant value by a mechanical device on the wind turbine [2]. Another problem is that when we have a high value of wind speed, the totality of the theoretical power can not be extracted. To overcome this issue, a converter, which must be dimensioned for the totality of the power exchanged, should be placed between the stator and the network [2] and [3]. Another type of aero-generator is the one which disposes a doubly-fed induction generator (DFIG). The latter provides access to the rotor windings; hence the rotor voltage can be impressed. By using power converter connected to the rotor side, the independent control of the active power and reactive one can be obtained ensuring a good performance at both low losses and low cost [2] and [3]. The disadvantage associated with the DFIG is that the slip rings and carbon brushes have to be systematically maintained. To cure this disadvantage, more research has been developed about the DFTSIG [4, 5, 6].This machine combines the great advantages of a DFIM with a high reliability and low maintenance requirement; avoiding the use of slip ring and brushes [ 5,6,7,8,9,10,11,12,13,14,15and 16]. DFTSIG is composed of two doubly fed induction machines called power machine (PM) and control one (CM). They are used with the rotors Corresponding author: souhir.nouali@laposte.net Advanced Control and Energy Management Research Unit University of Sfax, National School of Engineering, Department of Electrical Engineering BP W, 3038, Sfax, Tunisia Copyright © JES 2011 on-line : journals/esrgroups.org/jes S. NOUALI et al: Control Strategy of a Wind Energy Conversion System mechanically and electrically coupled. As all variable-speed constant-frequency generators the BDFTSIG can be controlled to maximise the system efficiency by capturing maximum wind power at the rotor speed tuned according to the wind speed (maximal power tracking)[8,10].The active and reactive power of the power machine can be controlled via the rotors from the control machine stator [8,10]. For that, DFTSIG have been proposed to apply in renewable energy generation systems i.e. small hydropower plants, windmills, shaft generators of vessels and embedded applications [13,11,12]. Over recent years, various DFTSIM control strategies have been reported. For example, in [10,14,15,16] a different vector control schemes have been attempted. In [11] the control of an autonomous cascaded doubly fed induction generator, operating in a variable speed constant frequency mode, has been presented. A modeling methodology based on dynamical equivalent circuits is given in this paper for the design of the DFTSIM controller. The control of a small distributed generation system with cascaded doubly fed induction generator and back-to-back converter is discussed in [17]. In this paper, we propose a model and a control strategy of new Wind Energy Conversion Systems (WECS) based on a DFTSIG. The WECS under study is presented in figure1. It is based on a DFTSIG where the power machine stator is directly connected to the power system grid while the control machine stator is connected to a PWM rectifier; allowing an optimal power extraction by the use of an M.P.P.T algorithm. A PWM inverter ensures the injection of the produced power to the AC grid .Between the tow converters, a capacitor is used as a voltage DC bus .This system is connected to the grid via a filter to reduce the higher-frequency components[12]. The remaining part of the paper is organized as follows: Section (2) focuses on the modelling of each component of the WECS which are presented in fig1. Section (3) describes the control strategies of the WECS. The latter constitutes of two parts: The DFTSIG control, which is placed to maximize energy captured from the wind turbine for each wind speed. The second part is the control of the active power and reactive one injected into the network via converters. Section (4) presents the simulation results and section (5) is the conclusion. wind Ωt G CM Psp, Qsp isp1 isp2 PM ig1 ig2 ig3 isp3 Ωmec Psc, Qsc isc1 irec iinv isc2 isc3 Uc urecd urecq rf : uind uinq Fig.1. WECS Composition 344 lf GRID (vg,wg) J. Electrical Systems 7-3 (2011):343-357 1. WECS Modelling 2.1. Wind Turbine Modelling The wind power acting on the swept area of the blade S is a function of the air density ρ and the wind velocity v . The transmitted power P is generally deduced from the wind power using the power coefficient Cp. 1 C p ρ π R 2v 3 (1) 2 The power coefficient is a non-linear function of the tip speed-ratio λ , which depends on P= the wind velocity and the rotation speed of the shaft Ω t . Ωt R v There is a value of λ= (2) λ = λopt for which C p is maximized [18], where the wind turbine captures the maximum wind power. The aerodynamic torque is given by P v3 1 = Cp ρπ R2 Ωtη 2 Ωt where: η is the gear ratio . Tw = (3) Fig. 2. The wind turbine output power characteristics Fig. 2 gives the wind turbine output power characteristics for several wind speeds. It is obvious that for each wind speed, there exists a specific point in the wind generator power characteristic, called maximum power point (MPP), where the output power is maximized [19]. 2.2. DFTSIG Modelling The model of the DFTSIG can be derived from the models of two DFIG connected as shown in figure 1. Different pole pairs for power and control machine are possible, but for approximately the same torque rating of the control and power machines pp should be equal to pc [10]. And To make DFTSIG exhibit synchronous behaviour, the frequency of the current induced in both the power machine rotor and the control machine rotor must be the same. Under such conditions we can duduce that: 345 S. NOUALI et al: Control Strategy of a Wind Energy Conversion System (ω p − p p Ωmec ) = −(ωc − pc Ωmec ) (4) where ωc and ω p are the control and power machine stator frequency ,respectively; Ωmec is the mechanical speed and pp and pc are the power and control machine pole pairs, respectively. Power Machine Modelling The power machine model placed in (d,q) reference frame, which is synchronized with the power machine stator flux rotates at the angular speed ω p = ωg ( d axis is aligned to the flux space vector), expressed in the space vector notation : ⎧d ⎪⎪ dt Φ spn = − rslp I spn − jω g Φ spn + Vgn ⎨ ⎪ d Ψ = −r I rp rpn − j (ω g − ( p p + pc )Ω mec ) Ψ rpn + Vrpn ⎪⎩ dt rpn (5) where ⎧⎪Φ spn = (lsp + l ) I spn + lmp I rpn ⎨ ⎪⎩ Ψ rpn = lrp I rpn + lmp I spn and (6) ⎡ispd ⎤ ⎡φspd ⎤ ⎡ vgd ⎤ ⎡ vrpd ⎤ ⎡irpd ⎤ ⎡ψ rpd ⎤ ; Vgn = ⎢ ⎥ ; ispn = ⎢ ⎥ ; Φ spn = ⎢ Vrpn = ⎢ ⎥ ; I rpn = ⎢ ⎥ ; Ψ rpn = ⎢ ⎥ ⎥ ⎣ ispq ⎦ ⎣φspq ⎦ ⎣ vgq ⎦ ⎣ vrpq ⎦ ⎣ irpq ⎦ ⎣ψ rpq ⎦ Φ spn = Ψ spn + l I spn , rslp = r + rsp Vrpn, Irpn, Ψrpn , rrp are the power machine rotor voltage, current, flux and resistor ;respectively, placed in the (d,q) reference frame Ispn , Ψspn ,Ispn and rsp are the power machine stator current, flux and resistor ,respectively; placed in the (d,q) reference frame r, l and Vgn are the grid resistor, inductance and voltage magnitude, respectively. l sp , l m p and l rp are the power machine stator, mutual, and rotor inductance , respectively and d, q is the direct and quadrature components ;respectively. Control Machine Modelling The control machine model placed in (d,q) reference frame expressed in the space vector notation : ⎧d ⎪⎪ dt Ψscn = −rsc I scn − j(ωg − ( p p + pc )Ωmec )Ψ scn + Vscn ⎨ ⎪ d Ψ = −r I − j (ω − p Ω )Ψ + V rc rcn g p mec rcn rcn ⎪⎩ dt rcn where : ⎧⎪Ψ scn = lsc I scn + lmc I rcn ⎨ ⎪⎩Ψ rcn = lrc I rcn + lmc I scn 346 (7) J. Electrical Systems 7-3 (2011):343-357 and ⎡iscd ⎤ ⎡ψ scd ⎤ ⎡vscd ⎤ ⎡ vrcd ⎤ ⎡ircd ⎤ ⎡ψ rcd ⎤ Vrcn = ⎢ ⎥ ; I rcn = ⎢ ⎥ ; Ψ rcn = ⎢ ⎥ ; I scn = ⎢i ⎥ ; Ψ scn = ⎢ψ ⎥ ; Vscn = ⎢ v ⎥ v i ψ ⎣ rcq ⎦ ⎣ rcq ⎦ ⎣ rcq ⎦ ⎣ scq ⎦ ⎣ scq ⎦ ⎣ scq ⎦ Vrcn, Ircn, Ψrcn , rrc are the control machine rotor voltage, current, flux and resistor ;respectively, placed in the (d,q) reference frame. Vscn , Iscn , Ψscn , rsc are the control machine stator voltage, current, flux and resistor ,respectively; placed in the (d,q) reference frame. lsc , lmc and lrc are the control machine stator, mutual, and rotor inductance , respectively. Taking into account the connection between the two rotors, the power machine and control machine currents and voltages, placed in d,q reference frame, are related as: * ⎧⎪Vrpn = Vrcn ⎨ * ⎪⎩ I rpn = − I rcn = I rn (8) By taking into account the following equation (8), the rotor current model of the DFTSIG placed in d,q reference frame, expressed in the space vector notation can be written: rr I rn + d Ψrn + j (ωg − p pΩmec )Ψrn = 0 dt (9) where Ψ rn = Ψ rpn − Ψ *rcn and rr = rrp + rrc Mechanical Equation The mechanical equation is given by: J d Ω m ec = T w − Tem dt (10) where : T em = T emp + T emc 3 * Temp = p p imag ( I spn Ψspn ) 2 3 * Temc = − p c imag ( I scn Ψ scn ) 2 and Tem is electromagnetic torque, Temp and Temc are the power an control machine electromechanically torque, respectively and J is the total inertia which appears on the shaft of the generator (kg.m2). 347 S. NOUALI et al: Control Strategy of a Wind Energy Conversion System We deduce, from (5), (7) and (9) and (10), that the DFTSIG model placed in (d,q) reference frame, which is synchronized with the power machine stator flux rotates at the angular speed, expressed in the space vector notation: d Φ spn = − rslp I spn − jω g Φ spn − V gn dt (11) d Ψrn = −rr I rn − j (ω g − p p Ω mec )Ψrn dt (12) d Ψ scn = − rsc I scn − j( ω g − ( p p + pc )Ω mec )Ψ scn + Vscn dt j (13) d Ω m ec = T w − Tem dt (14) where Φ spn = lspl I spn + lmp I rn (15) Ψ rn = l mp I spn + l r I rn − l mc I scn (16) Ψ scn = lsc I scn − lmc I rn (17) and l r = l rp + l rc 2.3. Converters Modelling The converters are modelled in the d-q reference frame according to the switching function concept [20]. The rectifier provides the voltages Vscn = vscd vscq T from the capacitor voltage Uc and the [ ] modulated current i rec : ⎛ v scd ⎞ U c ⎜ ⎟ ⎜v ⎟ = 2 ⎝ scq ⎠ ⎛ u recd ⎞ ⎜ ⎟ ⎜u ⎟ ⎝ recq ⎠ and irec = 1 (u recd i scd + u recq i scq ) 2 (18) where (urecd,urecq) are the rectifier switching functions. The inverter yields the inverter voltages vinvn = vinvd vinvq T from the capacitor voltage and [ ] [ ] the inverter modulated current i inv from the line currents I fn = i fd i fq T : ⎛ v invd ⎞ U c ⎟ ⎜ ⎜v ⎟ = 2 ⎝ invq ⎠ ⎛ u invd ⎞ ⎟ ⎜ ⎜u ⎟ ⎝ invq ⎠ and i inv = 1 (u invd i fd + u invq i fq ) 2 (19) where (uinvd,uinvq) are the inverter switching functions The DC bus voltage is given by the following differential equation: d U c = i rec − iinv dt where C represents the capacitance of the DC bus. C 348 (20) J. Electrical Systems 7-3 (2011):343-357 It is assumed that the filters of the converter reduce the higher-frequency components [21]. In the d-q reference frame, the voltage balance across the filter inductors and resistors is: v invd − v gd = r f i fd + l f d i fd − l f ω g i fq dt d v invq − v gq = r f i fq + l f i fq + l f ω g i fd dt 2. WECS Control strategy (21) The control strategy of the studied WECS consists of two parts: • The DFTSIG control is vector based on the orientation of the power machine stator flux, to maximize energy captured from the wind turbine for each wind speed, and to control the reactive power injected to the grid via the power machine stator. • The control of the active and reactive power injected into the grid via converter. 3.1. DFTSIG control vector 3.1.1 Control description The WECS includes the wind turbine; the DFTSIG and the rectifier (see Fig.2). The latter is used to control the control machine stator currents. By such doing, active and reactive power, speed and torque of the generator can be controlled [21]. MPPT block wind, based on knowledge of the WECS dynamics and power characteristics, is used to set the torque reference on the optimal wind torque corresponding to the maximum wind power of each wind speed [21]. This Block provides the value iscq _ ref . In this study, the vector control strategy, applied to the DFTSIG and based on the orientation of the power machine stator flux, consists in imposing a reference of the forward current i scd _ ref .This latter is set from desired reactive power reference (Qsp_ref=0) . The d- and q-axis reference voltages v scd _ ref and v scq _ ref are given by the d- and q-axis reference currents applied to two PI regulators and two decoupling stages. The control strategy of the DFTSIG, previouslydescribed, is illustrated in figure 3. Fig.3. block diagram of the DFTSIG control 349 S. NOUALI et al: Control Strategy of a Wind Energy Conversion System 3.1.2 Simplified model of the DFTSIG To elaborate the adequate control device allowing us to follow the wind speed random variations, it is very important to reduce the order of the aero-generator model. By choosing a d-q reference-frame which synchronizes with the power machine stator flux rotates at the angular speed ωp ,and setting the power machine stator flux vector aligned with d-axis, we can write: Φ spn = φ spd + jφ spq = φ spd + j 0 Neglecting the per-phase power machine stator resistance R spl (that's the case for medium power machines used in wind energy conversion systems WECS) and supposing that the permanent state is reached, the amplitude and frequency of the network voltage (of infinite power) is fixed [3], we have: ⎧⎪vgd = 0 d and φspd = 0 (22) ⎨ ω φ V = 0 + jv = j dt gq g spd ⎪⎩ gn The rotor current can be found from (21) as: Φ spn − lsp I spn (23) I rn = lmp By using (30) Irn can be eliminated from (22) as follows: Ψ rn = ( lmp − lr lsp lmp )I spn + lr Φ spn − lmc I scn lmp (24) By using (30), and (31) I rn and Ψrn can be eliminated from (18) as follows: 0 = −(lr − 2 lmp lmclmp d d l d r I scn ) I spn − rr I spn + r ϕ spd + r φspd − lsp dt lsp dt lsp lsp dt 2 ⎡ ⎤ lmp lmclmp l I scn ⎥ + j (ω g − p pωr ) ⎢ −(lr − ) I spn + r φspd − lsp lsp lsp ⎢ ⎥ ⎣ ⎦ (25) if the imaginary part equals to zero, we can deduce the power machine stator current as shown in the following equation: I spn = k1 where φ spd l sp k1 = − k 2 I scn (26) 2 l l lr ; ' l 'r ; ' τr ; l mp and k 2 = mc mp = τ τr = lr = lr − r ' rr τr rr l sp l r' l sp The rotor current can be found by using (30) and (33): I rn = −k 3 where k 3 = φ spd l sp − l mc l r' I scn l mp l r' The control machine stator flux can be found by using (23) and (34): Ψ scn = l sc' I scn + k 2φ spd (28) 350 (27) J. Electrical Systems 7-3 (2011):343-357 2 where l sc' = l sc + l mc lr By substituting (35) in equation (19), and decomposing this latter into real and imaginary parts, the simplified DFTSIG model which will be considered later for elaboration of the control device is: d 1 (29) iscd = ' ⎡⎣vscd − rsc iscd − ed ⎤⎦ dt lsc d 1 iscq = ' ⎡⎣ vscq − rsc iscq − eq − eφ ⎤⎦ dt lsc j d Ω mec = T m − T em dt (30) (31) where ' ed = −lsc (ω g − ( p p + pc )Ω mec )iscq eq = lsc' (ωg − ( p p + pc )Ωmec )iscd eφ = k2 (ω g − ( p p + pc )Ω mec )φspd Showing the control machine quadrature component current, the expression of the electromagnetic torque reduces itself to: 3 (32) Tem = − k2 ( p p + pc )φspd iscq 2 We note from (39) that DFTSIG behaves as an equivalent induction machine with the flux equals to φ spd and number of pole pairs equals to ( p p + p c ) . The active and reactive powers injected to the grid via the power machine stator can written as follows: (33) Psp = − k2 iscq vgq Qsp = k1 φspd v gq − k2 iscd v gq lsp 3.1.3 (34) Control device Establishment When we impose an electro mechanic torque and reactive power reference, we can determine the control machine current references as follows: iscq _ ref = − Tem _ ref 2 3 k2 ( p p + pc )φspd iscd _ ref = − Qsp _ ref k 2 vgq − k1 φspd lsp k2 The control device introduces two new decoupling voltages vd and vq expressed as follows: ⎧ ' d ⎪⎪v d = lsc dt iscd + rsc iscd (35) ⎨ ⎪v = l ' d i + r i ⎪⎩ q sc dt scq sc scq 351 S. NOUALI et al: Control Strategy of a Wind Energy Conversion System The vector control allows fixing the (d-q) control machine stator voltage refernces as follows: ⎧⎪ v scd − ref = v d − ref + e d − ref ⎨ ⎪⎩ v scq − ref = v q − ref + eq − ref + eΦ − ref (36) where vd _ ref = ( k p + vq _ ref = ( k 'p + ki )(iscd _ ref − iscd ) p ki' )(iscq _ ref − iscq ) p ki, kp, ki’, kp’ are the regulators parameters ed _ ref = −l sc' (ω g − ( p p + p c )Ω mec )i scq _ ref eq − ref = l sc' (ω g − ( p p + p c )Ω mec )i scd _ ref eΦ _ ref = k 2 (ω g − ( p p + p c )Ω mec )φ spd _ ref where φ spd _ ref is the power machine stator flux value imposed by the grid .After an inversion of equation (24), we obtain the rectifier voltage references given by : ⎛ urecd _ ref ⎞ 2 ⎛ vscd _ ref ⎞ ⎜ ⎟ = ⎜ ⎟ ⎜ urecq _ ref ⎟ U c ⎜ vscq _ ref ⎟ ⎝ ⎠ ⎝ ⎠ Fig.4 Show the DFTSIG model and the currents control proposed in this section. 1 / l’sc s+rsc 1 / l’sc s+rsc Fig. 4. Block diagram of the currents control and the model of the DFTSIG 352 (37) J. Electrical Systems 7-3 (2011):343-357 3.2. Active and reactive power control Fig. 5. Block diagram of the active and reactive power control The aero generator is connected to the DC bus and then to the load via the inverter and a line. This converter allows us to control the continuous voltage and the active and reactive powers exchanged with the grid [22]. The power control is illustrated in Fig.6. This latter consists of: • An outer regulation loop consists of a DC voltage regulator and generates an active power reference Pfref. • Inner current regulation loops consist of a current regulator whose references are set from desired active and reactive power references on the filter side. We chose the unity power factor strategy; i.e. the reactive power is set to zero (Qf_ref =0). The power control is illustrated in Fig. 5. Currents control When we impose an active and reactive power reference, we can determine the line current references as follows: Pf _ ref v gd − Q f _ ref v gq ⎧ ⎪if dref = 2 2 v gd + V gq ⎪ ⎨ Pf _ ref v gq + Q f _ ref v gd ⎪if = 2 2 ⎪ qref v gd + v gq ⎩ We can deduce from (27) that the control of the different actions shown in Fig.6: -The closed loop current control: ⎧⎪v bd _ ref = C i (i fd _ ref − i fd ) ⎨ ⎪⎩v bq _ ref = C i (i fq _ ref − i fq ) - The compensation of a grid voltage: ⎧⎪e fd = l f ω g i fq ⎨ ⎪⎩e fq = l f ω g i fd - The currents decoupling: (38) i fd and i fq currents leads to three (39) (40) 353 S. NOUALI et al: Control Strategy of a Wind Energy Conversion System ⎧⎪v invd _ ref = v bd _ ref + v gd − e fd ⎨ ⎪⎩v invq _ ref = v bq _ ref + v gq + e fq (41) Fig.6. block diagram of the line currents control The continuous bus Control: To ensure the regulation of the transits power, it is paramount to use the regulation loop to maintain the DC bus voltage as constant as possible.The output of the DC voltage regulator is the reference current: icref = C v ( U cref − U c ) (42) In order to generate and send a current to the grid, the DC bus voltage U cref must be higher than the peak value of the voltage appearing on the filter side. So U cref f 2 3 Vrms , where Vrms is the rms value of the simple voltage appearing side of the filter. 4. Simulation results We present the simulation of the DFTSIG, which is connected directly to the network through the power machine stator, and controlled by the control machine stator through a back to back converter. Results of simulations are obtained with reactive power references Qsp_ref = 0 and Qf_ref=0. Figure 7 shows the wind speed which is ranged between 6 and 12 m/s with an average value of 9 m/s. Figure 8 shows the rotor speed. The latter varies according to the wind turbine speed change to extract the maximum wind power for each wind speed. Figure 9 presents wind power. The reference electromechanical torque, presented in figure 10, accords with the MPPT algorithm. The voltage of DC bus is represented in figure 11, which demonstrates that this voltage is perfectly constant, and 354 J. Electrical Systems 7-3 (2011):343-357 proves the effectiveness of the established regulators. The d and q components of line currents are given respectively in figure12 and 13. It is noticed that the control allows them to maintain their references values. Figure 14 presents the total active power injected into the grid (Pg=Psp +Pf). This cuve shows that PR varies over time in accordance with wind variation and presents fluctuations compared to the maximum wind power, shown in the figure (9).The total reactive power injected in the grid Qg (Qg =Qf+Qsp) is presented in figure 15. Obviously, reactive power is kept at 0 VAR, which coincides with the imposed power reference thanks to the currents regulation loop. Figure 16 shows the control machine stator voltages whose values are remained in the acceptable limits of functioning despite important wind speed fluctuations. Fig. 7. Wind speed Fig. 9. Wind power Fig. 11. DC bus voltage Fig. 13. q-component of the line current Fig. 8. Rotor speed Fig. 10. Output torque of the wind turbine Fig. 12. d-component of the line current Fig. 14. active power 355 S. NOUALI et al: Control Strategy of a Wind Energy Conversion System Fig. 15. reactive power 5. Fig. 16. control machine stator voltages Conclusion The work presented in this paper is devoted to modelling, control and simulation of a WECS using a Doubly-Fed twin Stator Induction Generator connected to the grid. We have established a two-phase mathematical WECS model. The latter contains representations of a wind turbine, DFTSIG and the converters. The control strategy of the studied WECS consists of two parts: the first one is the DFTSIG control which is vector based on the orientation of the power machine stator flux. The second presents the control powers. The obtained simulation results demonstrate the robustness of the control device whose objective is to maximize energy captured from the wind turbine for each wind speed and the control of the active power and reactive one injected into the grid via converters. 6. Appendice The parameters describing the WECS under study are given by : - Power machine Parameters: lsp=0.0073H ;lrp =0.0061H; lmp =0.0062H; rsp = 0 Ω; rrp=0.0073 pp=1;wp=wg=100*pi rad ; j = 4kg.m2 - Control machine Parameters: lsc=0.0073H ; lrc =0.0061H; lmc =0.0062H; rsc =0.0073 Ω Ω ; rrc =0.0073 Ω; pc=1 - DC bus and line parameters: rf=0,0002Ω; lf=5 μH; Uc=600V ; C=4400 μF. - Grid parameters: Vg=220V; ωg=100*pi rad 7. [1]. [2]. [3]. [4]. [5]. [6]. [7]. [8]. 356 References N.A. Ahmed, M. Miyatake and A.K. Al-Othman, Power fluctuations suppression of stand-alone hybrid generation combining solar photovoltaic/wind turbine and fuel cell systems, Energy Convers and Manage ,vol 49 , pp. 2711–2719, 2008. POITIERS .F ,BOUAOUICHE .T , MACHMOUM .M, Advanced control of a doubly-fed induction generator for wind energy conversion, Electric power systems research ,vol 79 pp. 1085-1096 , 2009. F. Poitiers, M. Machmoum, R. Le Doeuff and M.E. Zaim, Control of a doubly fed induction generator of wind energy conversion systems, International Journal of Renewable Energy Engineering ,vol 3, pp. 373378, 2001 R. Pena, J.C. Clare and G.M. Asher, Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation, IEE Proc Electric Power Applications , vol 143, pp. 231–241, 1996. Boardman, G., Zhu, J. & Ha, Q.P, Analysis of the Steady State Performance of Doubly Fed Induction Machines, Journal of Electrical & Electronics Engineering, Australia , vol 22, pp. 211-218, 2003. N. Chilakapati, Application of Double Fed Twin Stator Induction Machine as an Adjustable Speed Drive, Ph.D. thesis, Univ. Technology,Sydney, Australia, 2002. Boardman, G., Zhu, J. and Ha, Q.P, Dynamic and Steady State Modelling of the Doubly Fed Twin Stator Induction Generator with Core Loss, International Conference on Renewable Energy and Power Quality, Vigo, Spain, pp. 332-339, 2004. D. Basic, J. G. Zhu, and G. Boardman, Modeling and steady-state performance analysis of a brushless doubly fed twin stator induction generator, Proc. of the Australasian Power Engineering Conference (AUPEC’2002), Melbourne Australia, 2002. J. Electrical Systems 7-3 (2011):343-357 [9]. G. Boardman, J. G. Zhu, and Q.P. Ha, General reference frame modelling of the doubly fed twin stator induction machine using space vectors, Proc. of the Australasian Power Engineering Conference, Melbourne Australia, September 2002. [10]. Basic, D., Zhu, J. & Boardman, G. Transient performance study of a brushless doubly fed twin stator induction generator, IEEE Transactions On Energy Conversion , vol 18, pp. 400-408, 2003. [11]. Patin, N. Monmasson, E. Louis, J.-P, Modeling and Control of a Cascaded Doubly Fed Induction Generator Dedicated to Isolated Grids , IEEE Transactions on Industrial Electronics ,vol 56 , pp 4207 – 4219,2009 [12]. Adamowicz..M, Strzelecki.R, Mysiak. P, Cascaded doubly fed induction generator using PFC rectifiers, Compatibility and Power Electronics CPE , pp 186 – 190,2009 [13]. ADAMOWICZ. M and STRZELECKI. R, Cascaded Doubly Fed Induction Generator for Mini and Micro Power Plants Connected to Grid, Power Electronics and Motion Control Conference,Monacco, pp 1729 – 1733, 2008. [14]. B. Hopfensperger, D. J. Atkinson and R. A. Lakin, Stator flux oriented control of a cascaded doubly-fed induction machine, Proc. Inst. Elect.Eng.–Elect. Power Applicat., vol 146, pp. 597–605, 1999. [15]. Chilakapati, N, Ramsden, V.S, Ramaswamy.V & Zhu.J, Current space vector control of doubly fed twin stator induction machine drive, IEEE Conference on power System Technolog, Australia, pp. 73-78, December 2000. [16]. B. Hopfensperger, D. J. Atkinson, and R. A. Lakin, Combined magnetising flux oriented control of the cascaded doubly-fed induction machine, Proc. Inst. Elect. Eng.–Elect. Power Applicat, vol, 148, pp. 354– 362, 2000. [17]. Adamowicz .M and Strzelecki. R, Induction Cascaded Doubly Fed Induction Generator with a Back-to-Back Converter Connected to a Small Distributed Generation System, International Conference on Ecological Vehicles Renewable Energies EVER ,Monaco, CD-ROM ,2009 [18]. Y.Y. Hong, S.D. Lu and C.S. Chiou, MPPT for PM wind generator using gradient approximation, Energy Convers Manage, vol 50, pp. 82–89, 2009. [19]. Molina.M.G and Mercado. P.E, A new control strategy of variable speed wind turbine generator for threephase grid-connected applications , IEEE Transmission and Distribution Conference and Exposition, Latin America, 2008. [20]. Jemaa Brahmi, Lotfi Krichen and Abderrazak Ouali ,A comparative study between three sensorless control strategies for PMSG in wind conversion system, Applied energy, vol 89, pp. 1565-1573, 2008. [21]. Bouscayrol, Ph. Delarue and X. Guillaud, Power strategies for maximum control structure of a wind energy conversion system with a synchronous machine, Renewable Energy, vol 30, pp. 2273-2288, 2005. [22]. J.A. Baroudi, V. Dinavahi and A.M. Knight, A review of power converter topologies for wind generators, Renew Energy , vol 32, pp. 2369–2385, 2007. 357