Document
advertisement

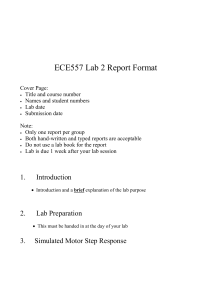
Root locus techniques j ω 5 K=50 4 3 2 K=0 −5 R(s) + E(s) − K 1 K=25 K=0 σ 0 σ C(s) s(s+10) K=50 •The root locus show the changes in the transient response as the gain ,K, is varied. K < 25 real poles, overdamped K = 25 multiple poles, critically damped K > 25 Complex poles, underdamped 1 • Looking at the underdamped poles (K > 25), the real parts of the complex poles stay the same. The setting time is inversely proportional to the real parts for this second order system so we can say that the settling time will remain constant for underdamped responses regardless of the value of K. •Also, as we increase the gain, the damping ratio diminishes, and the percent overshoot increases. The damped frequency of oscillator, equal to the imaginary part of the poles, also increases with the gain, resulting in a reduction of the peak time. •Finally, since the root locaus never passes into the right half plane, the system is always stable, regardless of the value of K, the gain. 2 Properties of the root locus Consider the system R(s) + E(s) C(s) K G(s) − H(s) R(s) KG(s) C(s) 1+KG(s)H(s) KG(s) T (s) = 1 + KG(s)H(s) (1) 3 • A pole exists when the characteristic polynomial in the denominator becomes zero, or KG(s)H(s) = −1 = 16 (2k + 1)180o, k = 0, ±1, ±2, ±3, ... so, |KG(s)H(s)| = 1 6 KG(s)H(s) = 6 (2k + 1)180o (2) • The first equation implies that substituting a value of s into the function KG(s)H(s) yields a complex number, if this complex number has an angle which is an odd multiples of 180o, the value, s, is a system pole for a particular value of K given by 1 K= |G(s)H(s)| (3) Using the previous example, we already know closed loop poles exist at −9.47 and −0.53 when K =5. For this system, K KG(s)H(s) = s(s + 10) (4) 4 Substituting s = −9.47, K = 5 KG(s)H(s) = 5 = −1 (5) −9.47(−9.47 + 10) • Applying these concepts to a more complex system. R(s) + E(s) − K (s+3)( s+4) C(s) (s+1)(s+2) The open loop transfer function is K(s + 3)(s + 4) (s + 1)(s + 2) The closed loop transfer function is KG(s)H(s) = T (s) = (6) K(s + 3)(s + 4) (1 + K)s2 + (3 + 7K)s+(2 + 12K) (7) 5 • If a point, s, is a closed loop pole of the system for a value K, then s must satisfy the two magnitude and angle equations. This can be checked graphically by looking at the open loop poles and zeros. jω 3 2 L1 L2 θ1 −4 −3 L 3 θ2 −2 L 4 θ3 θ4 1 −1 6 • Consider the point −2 + 3j, if this point is closed loop pole than the angles of the zeros minus the angles of poles must equal an odd multiples of 180o. θ1 + θ2 − θ3 − θ4 =50.31 + 71.57 − 90 − 108.43 = −70.55o therefore, −2 + 3j is not a point on the root locus, i.e. not a closed loop pole for any gain. •√Repeat these calculations for a point (−2 + j 22 ). The angles do add up to 180o. So this is a point on the root locus for a value of K, given by, 1 pole lengths K= = 1/M = Q (8) |G(s)H(s)| zero lengths √ 2/2 × 1.22 L3 × L 4 K= = = 0.33 (9) L1 × L 2 2.12 × 1.22 Q √ • Thus the point (−2 + j 22 ) is a point at the root locus for a gain of 0.33. 7 Example: Given unity feedback system that has a forward transfer function K(s + 2) G(s) = 2 s + 4s + 13 a) Calculate the angles of G(s) at the point (−3 + j0) by finding the sums of angles of vectors drawn from the zeros and poles of G(s) to the given point. b) Determine if this point lies on the root locus. c)If so, find the gain, K, using the lengths of the vectors. 8 K(s + 2) G(s) = 2 s + 4s + 13 a) zero at -2, poles at −b ± q b2 − 4ac , a = 1, b = 4, c = 13 2a √ −4 ± 16 − 52 = −2 ± 3j 2 θ2 j ω 3 2 L2 1 θ1 L1 −3 −2 −1 L3 θ3 9 θ1 = 180o, L1 = 1. o, L = θ2 = 180o + arctan[ 3 ] = 251.565 2 1 o θ3 = 180o − arctan[ 3 1 ] = 108.435 , L3 = √ √ 10. 10. θ = θ1 − θ2 − θ3 = 180 − 257.565 − 108.435 = −180o b) This point is on the root locus. Q √ √ pole lengths c) K = 1/M = Q zero lengths = 101 10 = 10. 10