Test Plan and Test Procedures Document
advertisement

BETA
Operational Benefit Evaluation by Testing an A-SMGCS
Growth Project 1999-RD.10804
Test Plan and Test Procedures Document
Test Procedures for Braunschweig
Operational Benefit Evaluation by Testing an A-SMGCS
H. P. Zenz, J. Jakobi
Project Funded by
European Commission, DG TREN
The Fifth Framework Programme
Competitive and Sustainable Growth
Contract 1999-RD.10804
Project Manager
Michael Roeder
Deutsches Zentrum für Luft und Raumfahrt
Lilienthalplatz 7, D-38108 Braunschweig, Germany
Phone: +49 (0) 531 295 3026, Fax: +49 (0) 531 295 2550
e-mail: beta@dlr.de
Copyright Notice: © 2002, EC Sponsored Project Beta
This document and the information contained herein is the property of Deutsches Zentrum für Luft- und Raumfahrt, Park Air Systems AS,
Deutsche Flugsicherung, Nationaal Lucht- en Ruimtevaartlaboratorium, QinetiQ, Air Navigation Services of the Czech Republic, Ceská
správa letist, Hamburg Airport, ERA, Thales ATM and the European Commission (EC). Any reproduction or other use of this material shall
acknowledge the BETA-Project, the companies involved and the EC as the information sources.
Visit the BETA Web page: http://www.dlr.de/beta
BETA
Operational Benefit Evaluation by Testing an A-SMGCS
Growth Project 1999-RD.10804
Test Plan and Test Procedures Document
Project Manager
Responsible Author(s):
Additional Author(s):
Company:
Subject / Title of Document:
Related Task('s):
Deliverable No. and Target Date
Save Date of File:
Document Version:
Reference / File Name
Number of Pages
Distribution Category: (P/R/I)*
Target Date
Document Control Sheet
M. Roeder
H. P. Zenz, J. Jakobi
K. Klein
DLR
Test Procedures for Braunschweig
WP5000
D16Ci
2002-02-18
1.0
D16CI-TPP-10.DOC
39
Public
2001-05-01
*Type: P: Public, R: Restricted, I: Internal
Member type
Document Distribution
Organisation
Name
Contractors
Sub-Contractors
dt-wordtmp-10.dot chg. "0"
Customer
Additional
Distributed **
http://www.dlr.de/beta
ANS-CR
AUEB
BA
CSL
QINETIQ
DFS
DLR
ERA
FHGG
HITT
TATM
BAE Systems
PAS
NLR
Quality Assurance
AHA
Airport BS (BWE)
intranet
internet
M. Tykal
K. Zografos
J. Conlon
P. Hlousek
A. Wolfe
K.-R. Täglich
M. Röder
Z. Svoboda
D. Wolf
A. Vermeer
S. Paul
B. Wortley
A. R. Johansen
F. van Schaik
B. Helgerud
D. Gleave
K. Oertel
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
EC
ACI
EUROCONTROL
IATA
IFATCA
C. Bernabei
J. Waechtler
P. Adamson
T. van der Veldt
L. Staudt
2002-02-18
2002-02-18
2002-02-18
2002-02-18
2002-02-18
Web page
** Distributed: insert date of delivery
A date in the Webpage line marked intranet corresponds to a delivery to all Project members (Contractors)
A date in the Webpage line marked internet column corresponds to a delivery to all on the list
Copyright Notice: © 2002, EC Sponsored Project Beta
This document and the information contained herein is the property of Deutsches Zentrum für Luft- und Raumfahrt, Park Air Systems AS,
Deutsche Flugsicherung, Nationaal Lucht- en Ruimtevaartlaboratorium, QinetiQ, Air Navigation Services of the Czech Republic, Ceská
správa letist, Hamburg Airport, ERA, Thales ATM and the European Commission (EC). Any reproduction or other use of this material shall
acknowledge the BETA-Project, the companies involved and the EC as the information sources.
Visit the BETA Web page: http://www.dlr.de/beta
BETA
Test Plan and Test Procedures Document
DLR
Change Control Sheet
Date
Issue
2001-03-19
2001-03-30
2001-04-17
2002-02-01
0.1
0.2
0,21
1.0
Changed Items/Chapters
Document Outline
First Draft
Final Draft
Formal changes
Comment
Working paper for the test phase I
Approved Document
Contents
Change Control Sheet.........................................................................................................................................3
Contents..............................................................................................................................................................3
1.
Scope of Document ...............................................................................................................................4
1.1 Objectives ..............................................................................................................................................4
1.2 Document Structure...............................................................................................................................4
2.
Introduction ...........................................................................................................................................4
2.1 Subsystems ............................................................................................................................................4
2.2 Test Equipment at Braunschweig ..........................................................................................................5
2.3 Data Recording used at Braunschweig ..................................................................................................9
2.4 Evaluation Tools..................................................................................................................................10
2.5 Human Actors during the BETA Test at Braunschweig .....................................................................10
3.
Testing A-SMGCS Performance Parameters ......................................................................................11
3.1 Testing Surveillance Performance Parameters ....................................................................................11
3.1.1 Testing Surveillance Accuracy (F1)...............................................................................................11
3.1.2 Testing Surveillance Identification and Classification Parameters (F2) ........................................18
3.2 Testing Monitoring/Alerting Performance Parameters (F3)................................................................20
3.3 Testing Guidance Performance Parameters (F5).................................................................................23
3.4 Testing ATCO-HMI Performance Parameters (F6) ............................................................................25
3.5 Test Equipment and Human Actors involved at Braunschweig Functional Tests ..............................27
4.
Testing A-SMGCS Operational Benefit Parameters ...........................................................................29
5.
Test Forms ...........................................................................................................................................31
5.1 Test Forms for Testing Performance Parameter at Braunschweig ......................................................31
5.2 Test Forms for Testing Operational Tests at Braunschweig ...............................................................37
6.
References ...........................................................................................................................................37
7.
List of Figures......................................................................................................................................37
8.
List of Tables.......................................................................................................................................37
9.
Acronyms and Abbreviations ..............................................................................................................38
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 3 of 39
Version 1.0
BETA
1.
Test Plan and Test Procedures Document
DLR
Scope of Document
This document is one of three parts of the “Test Plan and Test Procedures Document” for three airports:
•
•
•
1.1
D16a-TPP
D16b-TPP
D16c-TPP
Test Plan and Test Procedures document, test procedures for Prague (PRG).
Test Plan and Test Procedures document, test procedures for Hamburg (HAM).
Test Plan and Test Procedures document, test procedures for Braunschweig (BWE).
Objectives
This document, D16c-TPP, is the output of BETA WP5100 and describes the specific test procedures for
Braunschweig airport.
This document builds upon:
• WP 1200 Operational Concept, D03-OCD [1]
• WP 2100 General Test Concept, D10-GTC [2]
• Test Handbook,D33-THE [3]
• EUROCAE Working Group 41, MASPS on A-SMGCS, [4]
The document General Test Concept, D10-GTC [2], was not available at this time so that differences are
possible.
1.2
Document Structure
This document is structured into 5 chapters:
• Chapter 1 is this introduction
• Chapter 2 lists the involved subsystems, test equipment, recording systems, evaluation tools and
human actors
• Chapter 3 describes the functional tests
Surveillance, Guidance and HMI Performance Test
• Chapter 4 describes the operational benefit parameter testing
• Chapter 5 gives test forms for protocols and observer notes
2.
Introduction
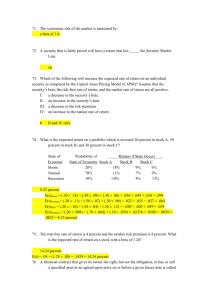
Figure 2-1 describes the subsystems, used at Braunschweig, with the interface connections using ASTERIX
and SSIC format and the data recording subsystems ( Data Logger ).
2.1
Subsystems
To execute the tests at Braunschweig the following subsystems (responsible partners in brackets) are used:
Surveillance:
Co-operative Sensor Subsystems
− GP&C System, DGPS Subsystem, (DLR)
− Mode S, Multilateration Subsystem, (ERA)
− ARMI, Aircraft Registration Mark Identification (DLR)
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 4 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Non-Co-operative Sensor Subsystems
− NRN, Near range Radar Network, (DLR)
Sensor Data Processing
− SDF, Surveillance Data Fusion (DLR)
− SDS, Surveillance Data Server incl. monitoring and alert (PAS)
CHMI
− Tower CWP I (DLR)
− Tower CWP II (PAS)
Guidance/Communication
− Guidance Server, Data Link Interface, (PAS, DLR)
− Onboard System for Test Van [GP&C, Interface, Pilot HMI] (DLR)
− Onboard System for Test Aircraft [GP&C, Interface, Pilot HMI] (DLR)
System Management
− System Management (DLR)
− Recording (DLR and PAS)
2.2
Test Equipment at Braunschweig
The following test equipment is available at Braunschweig
Test Van ( DLR )
equipped with
• GP&C transponder
• Mode S transponder
• Driver HMI
• SAPOS (high precision DGPS)
• INS, Inertial Navigation System
The subsystems of the Test Van are shown in Figure 2-2.
The Test Van can be used as reference for the position calibration and measurement of the
A-SMGCS surveillance part. SAPOS represents a position accuracy of better then 10cm with
an update rate of once per second. For filling up the time gap in between this reference
position can be calculated by interpolation using the INS velocity with an update rate of
10Hz.
Specifications of the reference system, SAPOS:
Position accuracy 0.1 m
Velocity accuracy 0,2 m/s
Update rate
1 Hz.
Specifications of the inertial navigation system, INS:
Velocity accuracy 1,0 m/s
Update rate
10 Hz.
Heading accuracy 1 degree.
Data recording is available onboard and via telemetry data link on ground.
Onboard recording:
The update rate for the onboard recording is 1 Hz for SAPOS position reports and
10Hz for INS velocity and heading reports.
Ground recording:
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 5 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
SAPOS position reports and INS velocity reports are transmitted via telemetry to the
ground station and are recorded with an update rate of 1 Hz.
Test Aircraft ( DLR )
equipped with
• GP&C transponder
• Mode S transponder
• Pilot HMI
Test CAR ( DLR )
equipped with
• GP&C transponder
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 6 of 39
Version 1.0
SSIC
SSIC
SSIC
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
plan-BWE-0.dsf
ARMI System
(DLR)
GP&C System
(DLR)
Mode S System
(ERA)
SSIC
NRN System
(DLR)
BETA
In
Data Logger
D1
(DLR)
SSIC
Data Logger
D2
(DLR)
Out
CORBA
ATCO HMI
(DLR)
SSIC to ASTERIX
Data Logger
D3
(DLR)
Public
Figure 2-1 Subsystems and Data-Logger at Braunschweig
SDF /
DBMS /
(DLR)
SSIC
Guidance
Server
(PAS)
Test Plan and Test Procedures Document
ASTERIX
In
Out
Data Logger
C
(PAS)
Surveillance
Data Server
/ Target
Database
(PAS)
GP&C
Data Logger
(DLR)
GP&C-Datalink
Page 7 of 39
Version 1.0
ASTERIX
C HMI
(PAS)
DLR
BETA
Test Plan and Test Procedures Document
Antenna
VHF
Antenna
GPS L1/L2
Antenna
VHF
Antenna
DLR
Splitter
INS
LTN-90
GP&C
D-GPS
SAPOS
D -GPS
Driver
Monitor
ARINC429
Hopf Uhr
COM 2
COM 1
Signal Conditioning Processor
RS232
RS232
RS232
GPS-Clock
129.247.62.4
ARINC 429
Mode S
System
COM 1
PC -Driver I
PCPilot HMI
GP&C-Server
CATS
DALICON
TR-SERV1
129.247.62.2 - 4102
129.247.62.5
LAN
VF.ESMGCS.DLR.DE
129.247.62.1
CISCO Router
On Bord System
2ASx
Telemetrie
UHF
Antenna
VHF
GPS
Antenne Antenne
UHF
Antenna
2ASx
Telemetrie
GP&C
D-GPS
On Ground System
CISCO Router
129.247.38.111
ESMGCS.DLR.DE
LAN
GP&C
Monitor
129.247.38.67
AVES_D
129.247.38.64
FP_INTERF
GP&CServ
AVES_Display
TELEServ
CATS
TELE-Log
129.247.38.41
TRES_A
DEFAMMLogger
TELNET
CATS
AVES-DSP
TEST-VAN-1.dsf
Figure 2-2 DLR Test Van at Braunschweig
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 8 of 39
Version 1.0
BETA
2.3
Test Plan and Test Procedures Document
DLR
Data Recording used at Braunschweig
SDF-Logger (DLR)
Recording SDF Data (Surveillance Data Fusion) for offline evaluation.
Recording SDS Data (Surveillance Data Server) for offline evaluation.
Recording of output data from all sensors
• SDF-In/Out
Recording all data at the SDF in- and output (Position Reports)
• NRN
Recording NRN Position Reports
• Mode-S
Recording Mode-S Position Reports
• ARMI
Recording ARMI Reports
• GP&C
Recording GP&C Position Reports
SDS-Logger (PAS)
Recording all SDS data (Surveillance Data Server) for offline evaluation.
• SDS-In/Out
Recording all data at the SDS (Position Reports)
HMI-Logger (DLR)
Recording all HMI data for offline replay and offline evaluation.
• ATCO-HMI, air traffic controller human machine interface.
• Pilot HMI, pilot human machine interface.
HMI-Logger (PAS)
Recording all HMI data at the HMI from PAS for offline replay and offline evaluation.
• ATCO-HMI, air traffic controller human machine interface.
GP&C-Logger (DLR)
• GP&C Data Link Logger
recording all data at the GP&C Data Link for the guidance tests and recording of all
Position Reports of GP&C equipped a/c and cars.
• GP&C CATS Logger
recording GP&C data for offline demonstration of movement of GP&C equipped a/c and
cars.
Video Camera Recorder
• For offline demonstration the HMI and the situation at the airfield is recorded with an
video camera with time marks.
Form Sheets
• ON
• DEB
• QUE
• TPR
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Observers Notes
Debriefing Notes
Questionnaire
Test Protocol
Public
Page 9 of 39
Version 1.0
BETA
2.4
Test Plan and Test Procedures Document
DLR
Evaluation Tools
Following evaluation tools for offline evaluation are defined:
Evaluation tools for offline analysis of recorded data.
SWA-P
Analysis software for time stamped position reports.
Different software tools are necessary for offline analysis of the recorded data to find out the
parameters.
Form sheets.
QUE
Filled-out Questionnaires.
DEB
Debriefing Notes.
ON
Observer Notes.
TPR
Test Protocols
2.5
Human Actors during the BETA Test at Braunschweig
The following human actors during the BETA tests are defined [3] below, responsible in brackets:
OTC
Operational Test Co-ordinator (DLR)
TTC
Technical Test Co-ordinator (DLR)
BC
BETA Controller (Controller at Braunschweig Airport)
BO
BETA Operator and BETA Observer (PAS & DLR) and
BETA Interviewer (DLR)
Driver
BETA Test Van and Test Car Driver (DLR)
Pilot
BETA Test Aircraft Pilot (DLR)
ATCO
Air Traffic Controller in the Tower ( BWE )
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 10 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
3.
Testing A-SMGCS Performance Parameters
3.1
Testing Surveillance Performance Parameters
DLR
Two scenarios for testing the Surveillance Performance Parameters are planned:
• Position Accuracy, tested with Case Studies.
• Classification, tested with Regular Traffic Studies.
3.1.1
Testing Surveillance Accuracy (F1)
These tests are performed through case studies.
The goal of this test is to evaluate the Position Accuracy and Time Latency of the Surveillance System as
described at the General Test Concept [2] chapter “Technical Function Test “. All Surveillance Sensors
(Mode-S, NRN, ARMI and GP&C) and the output of the Surveillance Data Fusion will be tested. The
surveillance function must automatically gather accurate and timely positional information on aircraft,
vehicles and other objects within the surveyed area of the aerodrome surface and the surrounding airspace.
Surveillance Position Accuracy Parameter [2]:
• Probability of Detection of co-operative and non co-operative sensors (PD)
• Probability of False Detection of co-operative and non co-operative sensors (PFD)
• Probability of Identification of co-operative targets (PID)
• Probability of False Identification of co-operative targets (PFID)
• Reported Position Accuracy (RPA)
• Reported Velocity Accuracy (RVA)
• Target Report Update Rate (TRUR)
• Target Report Latency (TRL)
• Position Renewal Time Out Period (PRTOP)
• Target Separation
Test Procedure:
Testing the position accuracy parameters by comparing the position report of each sensor and the
Surveillance Data Fusion, SDF, with a reference position. The reference position will be derived
from a satellite positioning system, SAPOS, and an inertial navigation system, INS, installed in the
Test Van.
Test Scenario:
F1A: Test Van taxiing on RWY
The Test Van is taxiing on RWY 26/08 and on TWY C, A, B, F and on the apron and is
proceeding at the centreline.
For static test of the Reported Position Accuracy the Test Van is stopped at a known position
on the TWY and RWY.
The dynamic test will be repeated with different velocities, e.g. 10m/s and 20m/s.
F1B:
A/C Take Off and Landing
Take off and landing of the Test A/C on RWY 26/08 and taxiing to the apron.
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 11 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
F1C:
A/C and Test Van taxiing on RWY
Take off and landing of the Test A/C on RWY 26/08 and taxiing to the apron.
The Test Van is taxiing on RWY 26/08 and on taxiways C, A, B, F and on the apron.
The Test Van is proceeding behind the a/c in a distance of more then 100m and is than
approaching the a/c until a distance of less then 10m.
F1D:
The Test Van and a GP&C equipped Test Car are taxiing on taxiways and runway.
The two test vehicles are taxiing on RWY 26/08 and on Taxiways A, B, and F.
The second Test Car is moving in opposite direction and is passing the other.
Data Recording:
• NRN-Data -Logger
• Mode-S-Data -Logger
• GP&C-Data -Logger
• SDF-In/ Out-Logger
• SDS-In/ Out-Logger
• HMI-Logger
• GP&C-Data Link Logger
• GP&C-CATS
NRN-Data recorded at SDF Input
Mode-S-Data recorded at SDF Input
GP&C-Data recorded at SDF Input
Recording all data at SDF Input and Output
Recording all data at SDS Input and Output
Recording all data at HMI
Recording GP&C Radio Link data
Recording GP&C data for offline display
Test protocol of BETA Observer:
Observing the real airport traffic and the HMI output:
Number and operation time of GP&C equipped vehicles in the vicinity.
Number of GP&C equipped vehicles shown on the HMI.
Number and operation time of unequipped vehicles in the vicinity.
Number of all vehicles shown on the HMI.
BETA Test Equipment and Human Actors involved:
F1A
1
2
3
Test Equipment
BETA Test Van (DLR), GP&C and Mode-S equipped
BETA Test A/C (DLR), GP&C and Mode-S equipped
Test Car, GP&C equipped
1
2
Human Actors
Operational Test Co-ordinator
Technical Test Co-ordinator
3
4
5
6
7
8
9
BETA Test VAN Driver No. 1
BETA Test Aircraft Pilot
BETA Test Vehicle Driver No. 2
BETA Operator (DLR) for NRN, Mode-S, GP&C, SDF, HMI
BETA Operator (PAS) for Data Server and HMI
BETA Observer ( DLR, Observer for Airport and HMI )
BETA Operator for Test Van
F1B
F1C
F1D
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Table 3-1 Human Actors involved in F1 Tests
Measuring Instruments:
• Analysis Software (SWA-P) for time stamped position reports from each sensor
and the SDF-Output,
• Observer Notes, ON,
• Debriefing reports, DEB,
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 12 of 39
Version 1.0
BETA
•
Test Plan and Test Procedures Document
DLR
Questionnaires, QUE.
Measuring the Probability of Detection (PD)
Analysis of the SDF-Logging data to get the number of reports from the test targets
(= total number of correct reports ).
Analysis of the Observer Notes to get the number of traffic objects recorded
(= expected number of reports ).
Calculate the Probability of Detection by following formula:
PD = ( Total no. of correct reports ) / ( Expected no. of reports ) * 100%
This calculation will be done for each sensor ( co-operative and non co-operative sensor ) and for the
SDF output.
Measuring the Probability of False Detection (PFD)
Analysis of the SDF-Logging data to get the number of reports from the test targets
(= total number of target reports ).
Analysis of the Observer Notes to get the number of fixed targets
(= number of fixed targets ).
Analysis of the SDF-Logging data to get the number of updates
(= number of updates ).
Calculate the Probability of False Detection by following formula:
PFD = ( No. of target reports – ( No. of fixed targets x No. of updates )
/ ( No. of updates ) * 100%
This calculation will be done for each sensor ( co-operative and non co-operative sensor ) and for the
SDF output.
Measuring the Probability of Identification of co-operative targets (PID)
Analysis of the SDF-Logging data to get the number of target reports with correct identification.
Analysis of the Observer Notes to get the total number of reports from identifiable targets.
Calculate the Probability of Identification by following formula:
PID = ( No. of target reports with correct identification )
/ ( Total no. of reports from identifiable targets)
* 100%
This calculation will be done only for co-operative sensors, at Braunschweig for the GP&C system
and the Mode-S system.
Measuring the Probability of False Identification of co-operative targets (PFID)
Analysis of the SDF-Logging data to get the number of target reports with erroneous identification.
Analysis of the Observer Notes to get the total number of reports from identifiable targets.
Calculate the Probability of False Identification by following formula:
PID = ( No. of target reports with erroneous identification )
/ ( Total no. of target reports ) * 100%
This calculation will be done only for co-operative sensors, at Braunschweig for the GP&C System
and the Mode-S system.
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 13 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Measuring the Reported Position Accuracy (RPA)
The true position is recorded from the reference system using the SAPOS.
The reported position of each sensor will be compared with the true position.
a) Static Reported Position Accuracy:
The true position is given by the position report of the SAPOS. If there is the possibility to
readout the reported A-SMGCS position online, the difference between the reported position and
the true position can be calculated directly while the test van or aircraft is stopped.
b) Dynamic Reported Position Accuracy :
The true position is given by the position report of SAPOS and INS. The difference between the
reported position and the true position can be calculated offline using the timestamp.
Calculate the RPA as follows:
For each position report the error in the X position, ∆x and in the Y position, ∆y is calculated with:
∆x = ( true X position - reported X position)
∆y = ( true Y position - reported Y position)
mean deviation X,
mean deviation Y,
quadratic
X,
quadratic
Y,
mx
my
qx
qy
=
=
=
=
RMSX =
√ ( qx - mx 2 )
RMSy =
√ ( qy – my 2 )
Rx
Ry
1/n
1/n
1/n
1/n
in metres
in metres
∑ ∆xi
∑ ∆yi
∑ (∆xi )2
∑ (∆yi )2
= C • RMSX + mx
= C • RMSy + my
RPA =
√
( Rx2 + Ry2 )
Where the coefficient C is given by the following table:
Confidence Level %
90
91
92
93
94
C
1.645
1.695
1.751
1.812
1.881
Confidence Level %
95
96
97
98
99
C
1.960
2.054
2.170
2.326
2.576
Table 3-2 Confidence Level
Measuring the Reported Velocity Accuracy (RVA)
The true velocity is given by the INS or by the SAPOS. The data are recorded during the test
onboard. The reported velocity (speed and heading or speed x and speed y) will be compared with
the true velocity.
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 14 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
This calculation will be done only for the co-operative sensors, GP&C, and for the Position Report at
the SDF-output with dynamic tests.
Calculate the RVA as follows [4] :
For each position report calculate the error in velocity, ∆v, and heading ∆ϕ.
∆v = ( true velocity - reported velocity)
∆ϕ = ( true heading - reported heading)
mean deviation X,
mean deviation Y,
quadratic
X,
quadratic
Y,
mv
mϕ
qv
qϕ
=
=
=
=
RMSV =
√ qv – mv 2 )
RMSϕ =
√ qϕ – mϕ2 )
Rv
Rϕ
1/n
1/n
1/n
1/n
in m/s
in degree
∑ ∆Vi
∑ ∆ϕ i
∑ (∆Vi )2
∑ (∆ϕi )2
= C • RMSV + mv
= C • RMSϕ + mϕ
Where the coefficient C is given by the Table 3-2 listed above:
Measuring the Target Update Rate (TRUR)
Analysis of the SDF-Logging data to get the number of reports from the test targets.
TRUR = ( No. of target reports ) / ( No. of seconds )
in samples per sec
This calculation will be done for each sensor and for the SDF output.
Measuring the Target Report Latency (TRL)
Each reported position includes the timestamp (TPRT) and also the time of reception (RT) at the
data logger is recorded. This assumes that the delivering time to the SDF and the data logger process
is equal. The difference is the Target Report Latency and will be shown as time histogram.
TRL i = ( Target Position Report Timestamp ) i -- (Reception Timestamp )i
This calculation will be done for each sensor and for the output of the Surveillance Data Server.
Measuring the Position Renewal Time Out Period (PRTOP)
Analysis of the SDF-Logging data to get the number of reports from the test targets.
Count the time out periods for an observation time of 3600sec, that means 3600 possible position
reports:
Time Out Period
1 sec
2 sec
3 sec
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Number of
occurrences (N)
3000
220
30
Public
Percentage/
Second
83.33
6.11
0.83
Page 15 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
4 sec
15 sec
10
2
DLR
0.28
0.05
This calculation will be done for each sensor and for the SDF output.
Measuring the Target Separation of non co-operative targets
Test the smallest distance for separation of two targets. Two targets are operating at the airfield and
one target is passing the other. Evaluate the distance at that point where the two targets are shown as
one target at the HMI.
Measuring the distance by analysis of the SDF-Logging data at the sensor output and the SDF
output.
Measuring the Coverage Volume (CV)
Analysis of the SDF-Logging data by plotting all tracks over the airport map.
This evaluation will be done for co-operative and non co-operative sensors.
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 16 of 39
Version 1.0
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
BS-DOC-B.dsf
H. P. Zenz
C
Aerodata
C
G
E
900 x 50 m
1560 x 30 m
Glider
Apron
Test Plan and Test Procedures Document
Public
Figure 3-1 Scenario for Functional Performance Tests F1
on
LBA-Apr
F1A
D
08
Re
fu
sta elin
tio g
n
BETA
08
B
26
F1D
F
DLR-A
pron
A
26
26
Page 17 of 39
Version 1.0
DLR
BETA
3.1.2
Test Plan and Test Procedures Document
DLR
Testing Surveillance Identification and Classification Parameters (F2)
From the Surveillance System the co-operating targets (aircraft and controlled vehicles) have to be detected
and identified by callsign or some other unique identifier, and the non co-operative targets and obstacles
should be detected and classified by size or type. The goal of this test is to verify these functions by
Regular Traffic Studies.
Surveillance Identification and Classification of non co-operative targets Parameters [2]:
• Probability of False Detection of non co-operative targets (PFD)
• Probability of False Classification of non co-operative targets (PFC)
• Coverage Volume of non co-operative targets(CV)
Test Procedure:
Testing the Surveillance Parameters (False Detection, False Classification and Coverage Volume )
will be done by observing the airport traffic by the BETA observer for a period of more then 1 hour.
The observer writes a protocol of the relevant differences between the airport traffic and the airport
situation shown on the ATCO-HMI display.
For offline replay the data on the SDF Output and ATCO-HMI Input will be recorded. With a plot of
the ATCO-HMI input data the coverage area will be shown.
No specific procedures with Test Van or Test A/C is necessary.
Test Scenario:
F2A: Test during normal airport traffic situation.
The BETA Observer writes a protocol of the situation and differences between the ATCO-HMI
display and the real airport situation. The duration shall be more than 1 hour.
F2B:
Test with absence of traffic (e.g. over night).
The BETA Observer writes a protocol of the situation and differences between the ATCO-HMI
display and the real airport situation. During absence of any known targets (typically overnight) the
duration shall be more than 1 hour.
Data Recording:
• NRN-Logger
• Mode-S-Logger
• GP&C-Logger
• SDF In/Out-Logger
• SDS In/ Out-Logger
• HMI-Logger
NRN-Data
recorded at SDF input
Mode-S-Data recorded at SDF input
GP&C-Data recorded at SDF input
Recording all data at SDF input and output
Recording all data at SDS input and output
Recording all data at HMI
BETA Test Equipment and Human Actors involved:
1
2
3
4
5
F2A
F2B
X
X
X
X
X
X
Test Equipment
Human Actors
Operational Test Co-ordinator
Technical Test Co-ordinator
BETA Operator (DLR) for NRN, Mode-S, GP&C, SDF, HMI
BETA Operator (PAS) for Data Server and HMI
BETA Observer ( Observer for Airport Traffic and HMI )
Table 3-3 Human Actors involved in F2 Tests
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 18 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Test protocol of BETA Observer:
The following items should be noted in the test protocol. For validation an ATCO-HMI replay of the HMI
input data can be used.
Protocol for approaching aircraft:
Observing real airport traffic:
Call Sign
Registration Mark
Type of Aircraft
Landing Time
Runway and Taxi Routing
Parking Place
Total number of identifiable targets
Total number of targets
Observing ATCO-HMI:
Appearance Time
Landing Time
Identification
Classification
Disappearance Time
Number of target reports with correct identification
Number of target reports with erroneous identification
Number of false classification
Protocol for departing aircraft:
Observing real airport traffic:
Call Sign
Registration Mark
Type of Aircraft
Parking Place
Taxi Routing and Runway
Take Off Time
Total number of identifiable targets
Total number of targets
Observing ATCO-HMI:
Appearance Time
Identification
Classification
Taxi Routing and Runway
Take Off Time
Disappearance Time
Number of target reports with correct identification
Number of target reports with erroneous identification
Number of false classification
Measuring Instruments:
Measuring Instruments are Observer Notes, Debriefing and Questionnaire (ON, DEB, QUE).
Measuring the Probability of False Detection (PFD)
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 19 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
For this test a period with low traffic should be selected, e.g. during night.
Analysis of the SDF-Logging data to get the number of reports from the test targets.
Analysis of the Observer Notes to get the number of fixed targets.
Analysis of the SDF-Logging data to get the number of updates.
Calculate the Probability of False Detection by following formula:
PFD = [ ( No. of target reports – No. of known targets) – ( No. of fixed targets x No. of
updates ) ] / ( No. of updates )
This calculation will be done only for non co-operative sensors, at Braunschweig for the NRN
system.
Measuring the Probability of False Classification (PFC)
Analysis of the Observer Notes to get the number of target reports with erroneous classification
and the total number of target reports.
Calculate the Probability of False Classification by following formula:
PFC = No. of false classification / Total no. of target reports * 100%
This calculation will be done only for non co-operative sensors, at Braunschweig for the NRN
system.
Measuring the Coverage Volume (CV)
Analysis of the SDF-Logging data by plotting all tracks over the airport map.
This evaluation will be done for co-operative and non co-operative sensors.
3.2
Testing Monitoring/Alerting Performance Parameters (F3)
The role of the alerting function is to monitor and assess the aerodrome traffic situation against the planned
situation and a set of safety rules, and provide alerts in the event of situations requiring intervention. Alerting
rules will be tailored to suit the aerodrome layout and operational conditions, and to ensure the required level
of safety for the operations.
The goal of this test is to verify the Alert Functions with Case Studies (CS).
There are two Alert Functions to be tested:
• Runway Incursion Alert
• Violation of separation minima
Alerting Performance Parameters [2] :
• Probability of Detection of an Alert Situation (PDAS)
• Probability of False Alert (PFA)
• Alert Response Time (ART)
Test Procedure:
a) Runway Incursion Alert:
Just before the Test A/C is taking off the Test Van is entering the runway and forces a Runway Incursion
Alert.
b) Violation of Separation minima:
Two GP&C equipped Test Cars are proceeding on a Taxiway and reducing the distance to a minimum.
This should generate a Violation of Separation Alarm.
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 20 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Test Scenario:
F3A: Runway Incursion Alert
The Test A/C is proceeding from the DLR apron to the RWY26 via TWY F and A, lining up at the
RWY26 and waits for take off clearance.
The Test Van is following the A/C as number two via F and B. After the A/C has lined up the Test
Van enters the RWY26 at TWY B. The Test Van than leaves the RWY via D and returns to the
apron via C and F.
After the Test Van has cleared the RWY, the Test A/C takes off and after finishing a traffic circuit,
lands again and returns to the apron.
F3B:
Violation of Separation Minima.
Two GP&C equipped Test Cars are proceeding at the taxiway. The second car is overtaking the
preceding car. A Violation of Separation Alarm should be generated
Data Recording:
• SDS-Data In/Out-Logger
• HMI-Logger
• GP&C-CATS
• Planning Data Logger
• Alert Data Logger
Recording on SDS in- and output
Recording all data on HMI
Recording for GP&C offline replay
Recording Route Planning Data
Recording Alert Data
BETA Test Equipment and Human Actors involved:
1
1
3
Test Equipment
BETA Test Van (DLR) GP&C equipped
BETA Test CAR (DLR) GP&C equipped
BETA Test A/C (DLR) GP&C equipped
1
2
3
4
5
6
Human Actors
Operational Test Co-ordinator
Technical test Co-ordinator
BETA Test Vehicle Driver I
BETA Test Vehicle Driver II
BETA Operator (DLR)
BETA Observer (Airport and HMI )
F3A
F3B
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Table 3-4 Human Actors involved in F3A and F3B Tests
Test protocol of BETA Observer:
The following items should be noted at the Test protocol. For validation the ATCO-HMI replay can be used.
Protocol for approaching aircraft:
Observing real airport traffic:
Call Sign
Registration Mark
Type of Aircraft
Landing Time
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 21 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Runway and Taxi Routing
Parking Place
Observing ATCO-HMI:
Appearance Time
Landing Time
Identification
Classification
Alert One Indication Time
Alert Two Indication Time
Alert Disappearance Time
A/C Symbol Disappearance Time
Protocol for departing aircraft:
Observing real airport traffic:
Call Sign
Registration Mark
Type of Aircraft
Parking Place
Taxi Routing and Runway
Take Off Time
Observing ATCO-HMI:
Appearance Time
Identification
Classification
Taxi Routing and Runway
Take Off Time
Alert One Indication Time
Alert Two Indication Time
Alert Disappearance Time
a/c Symbol Disappearance Time
Measuring Instruments:
Measuring Instruments are Observer Notes, Debriefing and Questionnaire (ON, DEB, QUE).
Measuring Probability of Detection of an Alert Situation (PDAS)
Calculate the Probability of Detection of an Alert by following formula:
PDAS = ( No. of correct alert reports ) / ( Total no. of actual alert situations )
* 100%
Measuring Probability of False Alert (PFA)
Calculate the Probability of an False Alert by following formula:
PFA = ( No. of false alerts ) / ( Total no. of aircraft movements )
* 100%
Measuring Alert Response Time (ART)
Note the time (t1) of entering the restricted area at which the restricted area incursion alerts occurs
by evaluation of the Position reports. Note the time (t2) at which the alert is given by evaluation the
HMI recording.
Calculate the Alert response Time by following formula:
ART = 1 / n ∑ni=1 ( t2 –t1 )
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 22 of 39
Version 1.0
BETA
3.3
Test Plan and Test Procedures Document
DLR
Testing Guidance Performance Parameters (F5)
During the tests at Braunschweig an onboard-HMI is installed in the Test Van (DLR ) and in the Test
Aircraft as well. The GP&C is used as data link for transmitting the guidance information from the ground
system to the onboard system. The goal of this test is to ensure the functionality of the guidance system, by
validation of
• the data link physically,
• the transmission of clearances,
• the transmission of read-backs and other information
This will be tested by Case Studies.
Guidance performance parameters:
• Clearance Delivery Response Time (CDRT)
• Guidance Aid Response Time (GART)
• Guidance Aid Confirmation Time (GACT)
Test Procedure:
The BETA Operator at the Guidance Server generates a Taxi Plan. The taxi plan guidance
information and the taxi plan clearances are transmitted to a Pilot HMI equipped Test Van or Test
A/C. The BETA Operator in the Test Van or Test A/C is operating the Pilot HMI and reports the
incoming data to the ground station via radio. The BETA Operator at the Guidance Server writes a
protocol of the actions and the Response Time. All data link information will be recorded by a
GP&C Data Link Logger.
Test Scenario:
F5A Test Van equipped with Pilot-HMI and GP&C data link located at a parking position on the ramp.
The BETA Operator at the guidance server generates a taxi plan and transmits the taxi clearance. The
onboard BETA Operator in the Test Van has to operate the Pilot-HMI and reports the guidance
information via radio to the ground station. The Test Van starts taxiing and follows the guidance
information from the Pilot-HMI.
The BETA Operator at the guidance server writes a protocol and the BETA Operator at the PilotHMI as well.
F5B
Test A/C equipped with Pilot -HMI and GP&C Data Link located at a parking position on the ramp.
The BETA Operator at the guidance server generates a taxi plan and transmits the taxi clearance. The
Pilot has to operate the Pilot-HMI and reports the guidance information via radio to the ground
station. The Test A/C is taxiing and follows the guidance information at the Pilot-HMI.
The BETA Operator at the guidance server writes a protocol.
Data Recording:
• GP&C-Data Link Logger
BETA Test Equipment and Human Actors involved:
F5A
1
1
1
Test Equipment
BETA Test Vehicle (DLR),
GP&C equipped and Pilot-HMI equipped
BETA Test A/C (DLR),
GP&C equipped and Pilot-HMI equipped
Human Actors
Operational Test Co-ordinator
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
X
X
X
Public
F5B
X
Page 23 of 39
Version 1.0
BETA
2
3
4
5
6
Test Plan and Test Procedures Document
Technical test Co-ordinator
BETA Test Vehicle Driver (DLR)
BETA Pilot for Test A/C (DLR)
BETA Operator for Guidance Server (DLR)
BETA Operator for Pilot HMI (DLR)
F5A
X
X
X
X
DLR
F5B
X
X
X
X
Table 3-5 Human Actors involved in F5 Tests
Test protocol of BETA Operator:
The following items should be noted in the test protocol from the guidance server operator.
Start Time of taxi plan generation
Response Time of taxi plan generation
Taxi plan routing
Measuring Instruments:
Measuring Instruments are Observer Notes, Debriefing and Questionnaires (ON, DEB, QUE)
and analysis of recorded data of GP&C Data Link Logger and Pilot HMI Data Logger.
Measuring the Clearance Delivery Response Time (CDRT)
Readout the Clearance Delivery Time from GP&C Data Logger
(t1 = Time of transmission of the guidance aid information ).
Readout the Clearance Delivery Response Time from GP&C Data Logger
(t2 = Time of receiving the response of the clearance ).
Calculation of the alert response time by following formula:
CDRT = 1 / n ∑ni=1 ( t2 –t1 )
Measuring the Guidance Aid Response Time (GART)
Readout the Guidance Aid Transmission Time from GP&C Data Logger
(t1 = Time of transmission of the guidance aid information ).
Readout the Guidance Aid Response Time from GP&C Data Logger
(t2 = Time of receiving a response from the guidance aid ).
Calculation of the alert response time by following formula:
GART = 1 / n ∑ni=1 ( t2 –t1 )
Measuring the Guidance Aid Confirmation Time (GACT)
Readout the Guidance Aid Transmission Time from GP&C Data Logger
(t1 = Time of transmission of the guidance aid information ).
Readout the Guidance Aid Confirmation Time from GP&C Data Logger
(t2 = Time of receiving the Confirmation of the guidance aid).
Calculation of the alert response time by following formula:
GACT = 1 / n ∑ni=1 ( t2 –t1 )
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 24 of 39
Version 1.0
BETA
3.4
Test Plan and Test Procedures Document
DLR
Testing ATCO-HMI Performance Parameters (F6)
Associated with each basic functional element of an A-SMGCS will be an HMI through which users can
interact with the system. HMI performance parameters are mostly concerned with the ability of the HMI to
provide accurate and timely presentation of information, with no degradation of the content or integrity of
the information received from the source, and to quickly accept and process user inputs.
The HMI Performance Parameters will be tested in Case Studies (CAS).
HMI Performance Parameters:
• Position Registration Accuracy (PRA)
• Response Time to Operator Input (RTOI)
• Display Latency (TDL)
Test Procedure:
Testing the position registration accuracy at the ATCO-HMI a car equipped with GP&C will operate
on all taxiways and runways. The car will drive at the centreline and an observer will watch the HMI
and write a protocol noting whether the display is correct and in time. To generate the data for
measuring the Display Latency the car will drive on the RWY at high speed.
Test Scenario:
F6
The car is taxiing on RWY 26/08 and on taxiways F, C, A, B and on apron.
On the RWY the car drives with high speed along the centreline.
Data Recording:
• SDF-In/Out-Logger
• GP&C CATS
• HMI-Logger
Recording all data at SDF in- and output.
Recording GP&C data for offline replay
Recording al data at the HMI
BETA Test Equipment and Human Actors involved:
F6
1
Test Equipment
BETA Test Vehicle (DLR) GP&C equipped
X
1
2
3
4
5
Human Actors
Operational Test Co-ordinator
Technical Test Co-ordinator
BETA Operator (DLR) for NRN, Mode-S, GP&C, SDF, HMI
BETA Operator (PAS) for Data Server and HMI
BETA Operator ( Observer for ATCO-HMI )
X
X
X
X
X
Table 3-6 Human Actors involved in F6 Tests
Test protocol of BETA Observer:
The following items should be noted in the test protocol. For validation an ATCO-HMI replay can be used.
Protocol ATCO-HMI Operator:
Events reported by the driver during Test Car drives along the centreline
Response Time on HMI Input
Display Time delay
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 25 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Measuring Instruments:
Measuring Instruments are Observer Notes and Debriefing (ON, DEB).
Video camera with recording device.
Measuring the Position Registration Accuracy (PRA)
A video with time registration for an offline replay and testing the Display Latency will be produced.
The Position Registration Accuracy is measured by the analysis of a replay of known moving targets.
Measuring the Target Display Latency (TDL)
a)
Display Test
Measurement of the Target Display Latency by comparing the HMI Display with the
actual moving of a known target.
b)
HMI Input Test
The latency is measured by comparing the actual time stamp of the SDF data output with
the registration time at HMI input.
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 26 of 39
Version 1.0
Test Plan and Test Procedures Document
OTC
TTC
BC
TCD
Pilot
TCD-II
BO-DLR
BO-PAS
BO-Airport
BO-VAN
NRN
Mode-S
GP&C
ARMI
SDF-DLR
C-HMI-DLR
SDS-PAS
C-HMI-PAS
NRN
Mode-S
GP&C
ARMI
SDF
SDF
GP&C
GP&C
HMI
Human Actors
Operational Test Co-ordinator
Technical Test Co-ordinator
BETA Controller
BETA Test Van I Driver
BETA Test A/C Pilot
BETA Test Van II Driver
BETA Operator for Data Recording
BETA Operator for Data Recording
BETA Observer for Airport + HMI
BETA Operator for Test Van
BETA Subsystems
NRN-System (DLR)
Mode-S System (DLR)
GP&C System (DLR)
ARMI System (DLR)
Surveillance Data Fusion (DLR)
Controller HMI (DLR)
Surveillance Data Server (PAS)
Controller HMI (PAS)
Data Recording
SDF NRN
SDF-Mode-S
SDF-GP&C
SDF-ARMI
SDF-All Input
SDF Out
GP&C Logger
GP&C CATS
HMI-Data
Test Equipment
Test Van equipped
Test A/C equipped
Test Car GP&C equipped
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F1A
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F1E
Public
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F1
Surveillance Accuracy
F1B
F1C
F1D
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F2
Surveillance Classification
F2A
F2B
F2C
F2D
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F3B
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F3A
F3
Alert
Test Equipment and Human Actors involved at Braunschweig Functional Tests
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
4
5
6
7
8
1
2
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
1
3
5
3.5
BETA
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F5
Guidance
F5A
F5B
Page 27 of 39
Version 1.0
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
F6
HMI
F6A
DLR
Form Sheets
Test Protocol of TTC
Debriefing
Observer Notes
Questionnaire
Test Protocol of Driver I
Test Protocol of Pilot
Test Protocol of Driver II
TPR-TTC
DEB
ON
QUE
TPR-DRV
TPR-PIL
TPR-DRVII
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Table 3-7 Test Tools for Functional Tests
1
2
3
4
5
6
7
BETA
X
X
X
X
F1A
X
X
X
X
X
X
X
X
X
F1E
Public
X
X
X
X
X
F1
Surveillance Accuracy
F1B
F1C
F1D
X
X
X
X
X
X
F2
Surveillance Classification
F2A
F2B
F2C
F2D
Test Plan and Test Procedures Document
X
X
X
X
F3A
F3
Alert
F3B
X
X
X
X
F5
Guidance
F5A
F5B
Page 28 of 39
Version 1.0
X
X
X
F6
HMI
F6A
DLR
BETA
4.
Test Plan and Test Procedures Document
DLR
Testing A-SMGCS Operational Benefit Parameters
Only the surveillance function of the HMI can be shown at Braunschweig airport. The controller HMI is
located at the tower and shows the actual traffic situation. The controllers are able to watch the HMI for
several days. The impression of the controllers are given by interview. This test will be done by statistic
approach, STA.
The questionnaire contains following items:
• Display of the airport map
• Display of aircraft and other targets
• Labelling of the targets
• Detection of all targets
Test Procedure:
The normal airport traffic is shown on the HMI. The NRN system is showing all non co-operative
targets operating in the NRN coverage volume. At Braunschweig are normally no co-operative
targets available. To show the indication of co-operative targets the Test Van and the Test A/C is
operating at the airport.
Test Scenario:
OP1: Co-operative targets operating at Braunschweig.
The Test Van is driving at TWY F, A, RW26, C and F.
The HMI is located at the tower and the interviewer is interviews the controller.
OP2: Co-operative a/c operating at Braunschweig.
The Test A/C driving at TWY F, A, RW26, C and F.
The HMI is located at the tower and the interviewer is interviews the controller.
Data Recording:
• SDF-In/Out-Logger
• SDS-In/Out-Logger
• GP&C CATS
• HMI-Logger
Recording all data at SDF in- and output.
Recording all data at SDS in- and output.
Recording GP&C data for offline replay
Recording al data at the HMI
BETA Test Equipment and Human Actors involved:
OP1
1
2
Test Equipment
BETA Test Vehicle (DLR) GP&C equipped
BETA Test A/C (DLR) GP&C equipped
1
2
3
4
5
6
7
Human Actors
Operational Test Co-ordinator
Technical Test Co-ordinator
BETA Operator (DLR) for NRN, Mode-S, GP&C, SDF, HMI
BETA Operator (PAS) for Data Server and HMI
BETA Operator ( Observer for ATCO-HMI )
BETA Controller ( Tower Controller )
BETA Interviewer ( DLR interviewing the Controller )
OP2
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Table 4-1 Human Actors involved in OP Tests
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 29 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
DLR
Measuring instruments:
Measuring instruments are Observer Notes, Debriefing and Questionnaire (ON, DEB, QUE).
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 30 of 39
Version 1.0
BETA
5.
Test Plan and Test Procedures Document
DLR
Test Forms
5.1
Test Forms for Testing Performance Parameter at Braunschweig
Following test forms are prepared:
•
•
•
•
•
Protocol of TTC, Technical Test Co-ordinator
Protocol of BETA Operator / Driver
Protocol of BETA Observer
Protocol of BETA Observer for test series F1 and F2 for approaching aircraft
Protocol of BETA Observer for test series F1 and F2 for departing aircraft
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 31 of 39
Version 1.0
BETA
BETA
Test Plan and Test Procedures Document
Test Protocol
Functional Test at Braunschweig
DLR
Sheet
Technical Test Co-ordinator
Test Series: F
Test No.:
Date:
Operational Test Co–ordinator
Technical Test Co–ordinator
Airport Test Co–ordinator
OTC
TTC
ATO
Weather Conditions:
Test Procedure:
BETA Subsystem:
NRN System
Mode - S
GP&C
SDF – In/ Out
SDS - In/ Out
HMI PAS
HMI DLR
GP&C Data Link
GP&C – CATS
Telemetrie
BETA Operator:
DLR
DLR
DLR
DLR
PAS
PAS
DLR
DLR
DLR
DLR
Data Recording:
DLR
DLR
DLR
DLR
PAS
PAS
DLR
DLR
DLR
DLR
BETA Test Equipment:
Test Van
Test Van GP&C
Test Van SAPOS
Test Van TRES
Test Van INS
BETA Operator:
DLR
DLR
DLR
DLR
DLR
Data Recording:
DLR
DLR
DLR
DLR
Remarks
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 32 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
Test Protocol
Functional Test at Braunschweig
BETA
DLR
Sheet
BETA Operator / Driver
Test Series: F
Sub System:
Test No.:
Date:
BO –Name:
Weather Conditions:
Test Procedure:
26
G l i d e r
B
C
F
A p ron
E
A e rod ata
DLR-
G
B S - D O C - B .d s f
H . P . Z e nz
A
Re
fu
el
stat in g
io
n
08
D
C
26
08
m
1560 x 30
900 x 50 m
A p ro n
pron
L B A -A
Data Recording:
No. Time
Remarks
Procedures:
No. Time
Remarks
File Name
*.TR1
*.NAV
End Time
Check List at TWY F
Mode-S
ON
SAPOS
Green and Dynamic
GP&C
ON
INS
NAV Mode
TR_SERV-B0.EXE
Running
Start Test Run
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 33 of 39
Version 1.0
BETA
Test Plan and Test Procedures Document
Test Protocol
Functional Test at Braunschweig
BETA
BETA Observer
Test No.:
Date:
Remarks
No.: of equipped targets on Airport / on HMI =
No.: of unequipped targets on Airport / on HMI =
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Sheet
Name:
Test Series: F
No. Time
DLR
Public
/
/
Page 34 of 39
Version 1.0
Call Sign
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Time
Parking
No. of
Targets
Public
Sheet
Class.
/Ident.
Date:
Disappear.
Appear.
Routing
.
No
Ldg Time
Name:
HMI Traffic
Reg.Mark Type
Test No.:
BETA Observer
Test Protocol
Functional Test at Braunschweig
Test Plan and Test Procedures Document
Airport Traffic
Approaching Aircrafts
Test Series: F1 / F2
BETA
BETA
Page 35 of 39
Version 1.0
No. of
Targets
DLR
Parking
Routing
T/O Time
Date:
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Time
Public
Sheet
DLR
Page 36 of 39
Version 1.0
Disappearance Class. /Ident.
Appearance
Type
.
No
Reg.Mark
Name:
HMI Traffic
Call Sign
Test No.:
BETA Observer
Test Protocol
Functional Test at Braunschweig
Test Plan and Test Procedures Document
Airport Traffic
Departing Aircrafts
Test Series: F1 / F2
BETA
BETA
BETA
5.2
Test Plan and Test Procedures Document
DLR
Test Forms for Testing Operational Tests at Braunschweig
To be completed!
6.
References
[1]
Operational Test Concept
BETA-D03-OCD-10.DOC
[2]
General Test Concept
BETA-D10-GTC-10.DOC
[3]
BETA Test Handbook
BETA-D33-THE-10.DOC
[4]
EUROCAE Working Group 41:
Minimum Aviation System Performance Standards for A-SMGCS, FINAL DRAFT,
EUROCAE, Paris 2001
7.
List of Figures
Figure 2-1 Subsystems and Data-Logger at Braunschweig..............................................................................7
Figure 2-2 DLR Test Van at Braunschweig .....................................................................................................8
Figure 3-1 Scenario for Functional Performance Tests F1.............................................................................17
8.
List of Tables
Table 3-1
Table 3-2
Table 3-3
Table 3-4
Table 3-5
Table 3-6
Table 3-7
Table 4-1
Table 9-1
Human Actors involved in F1 Tests ..............................................................................................12
Confidence Level ...........................................................................................................................14
Human Actors involved in F2 Tests ..............................................................................................18
Human Actors involved in F3A and F3B Tests .............................................................................21
Human Actors involved in F5 Tests ..............................................................................................24
Human Actors involved in F6 Tests ..............................................................................................25
Test Tools for Functional Tests .....................................................................................................28
Human Actors involved in OP Tests..............................................................................................29
Acronyms and Abbreviations.........................................................................................................38
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 37 of 39
Version 1.0
BETA
9.
Test Plan and Test Procedures Document
DLR
Acronyms and Abbreviations
a/c
ARMI
A-SMGCS
ATC
ATCO
BC
BETA
BO
BWE
CATS
CDRT
CV
CWP
DEB
DGPS
DLR
Fx
GACT
GART
GP&C
GPS
HMI
INS
MASPS
MASPS
Mode S
NRN
ON
OTC
PAS
PD
PFC
PFD
PFID
PID
PRA
PRTOP
QUE
RMS
RPA
RTOI
RWY
SAPOS
SDF
SDS
SSIC
SSR
STDMA
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Aircraft
Aircraft Registration Mark Identification
Advanced Surface Movement Guidance and Control System
Air Traffic Control
Air Traffic Control Officer
BETA Controller
Operational Benefit Evaluation by Testing an A-SMGCS
BETA Operator and BETA Observer
Research Airport Braunschweig
......
Clearance Delivery Response Time
Coverage Volume
Controller Working Position
Debriefing Notes
Differential GPS
German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt)
Performance Parameter Test Procedure no. x
Guidance Aid Confirmation Time
Guidance Aid Response Time
Global Positioning and Communication System
Global Positioning System
Human Machine Interface
Inertial Navigation System
Minimum Aviation System Performance Standards
Minimum Aviation System Performance Standards
Mode S Multilateration System (here: ASCS from ERA)
Nearrange Radar Network
Observer Notes
Operational Test Co-ordinator
Park Air Systems
Probability of Detection
Probability of False Classification
Probability of False Detection
Probability of False Identification
Probability of Identification
Position Registration Accuracy
Position Renewal Time-out Period
Questionnaires
Root-Mean-Square
Reported Position Accuracy
Response Time to Operator Input
Runway
Satellite Positioning Service
( Satellitenpositionierungsdienst der deutschen Landesvermessung )
Surveillance Data Fusion
Surveillance Data Server
Structured SMGCS Information exchange ......... (DLR internal message
protocol)
Secondary Surveillance Radar
Self organised Time Division Multiple Access (here: the experimental data link
Public
Page 38 of 39
Version 1.0
BETA
TDL
TPR
TRL
TRUR
TTC
TWR
TWY
VDL
WP
Test Plan and Test Procedures Document
DLR
based on GPS, predecessor of VDL Mode 4)
Display Latency
Test Protocol
Target Report Latency
Target Update Rate
Technical Test Co-ordinator
Tower Control (normally: ATC for RWY and inbound traffic)
Taxiway
VHF Data Link
Work Package
Table 9-1 Acronyms and Abbreviations
Issued: 2002-02-18
Doc ID: d16ci-tpp-10.doc
Public
Page 39 of 39
Version 1.0