NOTE TO USERS
This reproduction is the best copy available.
UMI
SEMISPECT: A SMALL-ANIMAL SPECT IMAGER BASED
ON EIGHT CdZnTe DETECTOR ARRAYS
by
Hyunki Kim
Copyright © Hyunki Kim 2004
A Dissertation Submitted to the Facuhy of the
COMMITTEE ON OPTICAL SCIENCES (GRADUATE)
In Partial Fulfillment of the Requirements
For the Degree of
DOCTOR OF PHILOSOPHY
In the Graduate College
THE UNIVERSITY OF ARIZONA
2004
UMI Number: 3158114
Copyright 2004 by
Kim, Hyunki
All rights reserved.
INFORMATION TO USERS
The quality of this reproduction is dependent upon the quality of the copy
submitted. Broken or indistinct print, colored or poor quality illustrations and
photographs, print bleed-through, substandard margins, and improper
alignment can adversely affect reproduction.
In the unlikely event that the author did not send a complete manuscript
and there are missing pages, these will be noted. Also, if unauthorized
copyright material had to be removed, a note will indicate the deletion.
UMI
UMI Microform 3158114
Copyright 2005 by ProQuest Information and Learning Company.
All rights reserved. This microform edition is protected against
unauthorized copying under Title 17, United States Code.
ProQuest Information and Learning Company
300 North Zeeb Road
P.O. Box 1346
Ann Arbor, Ml 48106-1346
2
The University of Arizona ®
Graduate College
As members of the Final Examination Committee, we certify that we have read the
dissertation prepared by
entitled
SEMISPECT:
Hyunkl Kim
A SMALL-ANIMAL SPECT IMAGER BASED ON EIGHT
CdZnTe DETECTOR ARRAYS
and recommend that it be accepted as fulfilling the dissertation requirement for the
Degree of
Doctor of Philosophy
Harrison H. .Barrett ,'9
date
Richard L. Shoemaker
Arthur
Gij/tro
^
Lars R. Furenlld
date
date
date
Final approval and acceptance of this dissertation is contingent upon the
candidate's submission of the final copies of the dissertation to the Graduate College.
I hereby certify that I have read this dissertation prepared under my direction and
recommend that it be accepted as fulfilling the dissertation requirement.
DlSSGrtStlon Director.
Hsririsori H» B3.irir6tt
dste
3
STATEMENT BY AUTHOR
This dissertation has been submitted in partial fulfillment of requirements for an
advanced degree at the University of Arizona and is deposited in the University Library
to be made available to borrowers under rules of the Library.
Brief quotations from this dissertation are allowable without special permission,
provided that accurate acknowledgement of source is made. Request for permission for
extended quotation fi-om or reproduction of this manuscript in whole or in part may be
granted by the copyright holder.
SIGNED:
4
ACKNOWLEDGMENTS
First of all, I thank God, who always listens to my prayers and leads me in his will.
Special thanks go to my advisor, Prof Harry Barrett for his invaluable guidance and
advice throughout my Ph.D program. I express my heartfelt gratitude to Prof Lars
Furenlid, who has shown me the right ways to overcome practical problems in system
development, and from whom I could learn invaluable knowledge and techniques with
respect to medical instrumentation. I thank Prof Arthur Gmitro and Prof Richard
Shoemaker for taking time to read, critique, and comment on this dissertation. I thank
Prof Don Wilson, who developed the reconstruction algorithm and gave me useful
advice on image reconstruction and image-quality improvement. I thank Prof Brad
Barber, who has taught me to understand detector physics in depth. I thank Prof
Zhonglin Liu and Dr. Gail Stevenson, who helped me to accomplish the initial animal
studies using SemiSPECT.
Thanks are also due to my coworkers in Center for Gamma-Ray Imaging (CGRI),
Michael Crawford, William Hunter, Sean Taylor, Lance Fesler, Benjamin Gershman,
Antonio Arce, Steve Balzer, Eric Goodwin, Dak Knight, and Dr. Todd Peterson, who
participated in system development and characterization, and this project could not be
completed without their efforts.
I owe special thanks to my wife, Wonsun Choi, for her patience and support for six
and half years. Finally I thank my family in Korea for their unchanged love and support.
This work was funded by National Institutes of Health grants R37 EB000803 and
P41 EB002035, the Center for Gamma Ray Imaging.
5
DEDICATION
This dissertation is dedicated to my wife, Wonsun Choi.
6
TABLE OF CONTENTS
LIST OF FIGURES
g
LIST OF TABLES
13
ABSTRACT
14
CHAPTER 1. INTRODUCTION
LL Medical imaging modalities
L1.1. Radiography
1.1.2. Computed Tomography
1.1.3. Magnetic resonance imaging
1.1.4. Ultrasound
1.1.5. Optical imaging of reporter genes
1.1.6. Nuclear medicine
1.2. Focus of the present work
16
16
17
Ig
19
20
21
22
25
CHAPTER 2. SEMISPECT
2.1. CdZnTe gamma-ray camera
2.1.1. Semiconductor detector materials
2.L2. Detector physics
2.1.2.1. Charge deposition
2.1.2.2. Charge Transport
2.1.2.3. Charge Induction
2.1.2.4. Detector imperfection
2.1.3. ASIC
2.1.4. Daughter board and doughnut board
2.2. Mechanics
2.2.1. Cooling system
2.2.2. Aperture
2.2.3. Small-animal stage
2.3. Front-end board
2.3.1. Hardware in front-end board
2.3.2. VHDL firmware in front-end board
2.4. Back-end board
2.4.1. Hardware in back-end board
2.4.2. VHDL firmware in back-end board
2.5. Control-and-status board
2.5.1. Hardware in clock-and-control board
2.5.2. Labview software operating eight control-and-status boards
28
31
32
34
35
36
37
39
40
43
45
48
5I
53
56
57
62
68
69
70
72
73
gO
7
TABLE OF COmENTS-CONTINUTED
2.6. Clock-and-bias board
2.6.1. Clock and bias signal description
2.6.2. Hardware in clock-and-bias board
2.7. Main LabVIEW software
84
84
93
97
CHAPTER 3. PERFORMANCE CHARACTERIZATION OF SEMISPECT
3.1. System matrix measurement
3.2. Spatial resolution
3.2.1. Planar resolution
3.2.2. Spatial resolution based on the Fourier crosstalk approach
3.3. Energy resolution
3.4. Sensitivity
3.5. Detectability
3.5.1. Signal detection theory
3.5.2. Hardware setup and detectability measurement
105
105
107
107
109
II7
12o
124
124
125
CHAPTER 4. IMAGING WITH SEMISPECT
4.1. Phantom imaging
4.2. Mouse imaging
4.2.1. Kidney and bladder imaging
4.2.2. Bone imaging
4.2.3. Myocardial imaging
4.2.4. Human cancer imaging with ^^"Tc-GLA
4.3. Discussion
133
I34
138
I39
141
CHAPTER 5. CONCLUSIONS AND FUTURE WORK
5.1. Conclusions
5.2. Future work
157
I57
158
REFERENCES
162
I44
I45
152
8
LIST OF FIGURES
FIGURE 2-1.
FIGURE 2-2.
FIGURE 2-3.
FIGURE 2-4.
FIGURE 2-5.
FIGURE 2-6.
FIGURE 2-7.
FIGURE 2-8.
FIGURE 2-9.
FIGURE 2-10.
FIGURE 2-11.
FIGURE 2-12.
FIGURE 2-13.
FIGURE 2-14.
FIGURE 2-15.
FIGURE 2-16.
FIGURE 2-17.
FIGURE 2-18.
FIGURE 2-19.
FIGURE 2-20.
FIGURE 2-21.
FIGURE 2-22.
FIGURE 2-23.
FIGURE 2-24.
FIGURE 2-25.
FIGURE 2-26.
FIGURE 2-27.
FIGURE 2-28.
FIGURE 2-29.
FIGURE 2-30.
Picture of the whole installation of SemiSPECT
29
Block diagram of electronics of SemiSPECT
30
Structure of the hybrid of a CdZnTe pixel detector and a read-out
ASIC
31
Cross-sectional view of a CdZnTe modular camera in SemiSPECT
34
Schematic of a read-out circuitry in ASIC
40
A simplified schematic of the multiplexer in the ASIC
42
Pixel signals in a frame scanned in a raster-scanning pattern (a) and the
resulting video stream (b)
43
Daughter board with a mounted hybrid
44
Picture of a doughnut board
44
CAD design of the mechanical components in SemiSPECT imager.... 45
Side view of the SemiSPECT imager and animal stage
47
Top view of the SemiSPECT imager
47
CAD design of components in a detector module
43
Picture of a detector module
49
CAD design of the copper heat sink, copper tubing, and doughnut
board support
50
Block diagram of the cooling system for a single modular camera in
SemiSPECT
50
Picture of two apertures
52
Picture of the gold inserts on the aperture
52
Cross-sectional schematic of the small-animal stage built in
SemiSPECT
54
Block diagram of a front-end board
55
Picture of a front-end board
58
Picture of eight front-end boards in the rack
58
Schematic of signal input/output
50
CAD design of a front-end board
62
Schematic of a 66 x 66 table in each SRAM (a) and the scanning
order (b)
64
Clock diagram illustrating list-mode data acquisition
55
Block diagram of a back-end board
58
Picture of a back-end board
69
Picture of a control-and-status board
72
Picture of eight control-and-status boards and eight clock-and-bias
boards in a rack
73
9
LIST OF FIGURES-COA^77A^[/£'Z)
FIGURE 2-31. Circuitry for choosing a control-and-status board to communicate
with the secondary computer
74
FIGURE 2-32. Schematic for reading the power status of a clock-and-bias board
75
FIGURE 2-33. Schematic for monitoring and controUing temperature of a detector. ... 75
FIGURE 2-34. Schematic for monitoring and controlhng analog and digital currents
supphed to the ASICs
78
FIGURE 2-35. Schematic for monitoring and controlling high voltage applied to
each detector surface
79
FIGURE 2-36. Main panel operating eight control-and-status boards
go
FIGURE 2-37. Temperatures on eight detectors as the temperatures are lowered
from room temperature to 5°C
82
FIGURE 2-38. Temperature variations on eight detectors for 10 hours, when each
temperature is stabilized at 5°C
82
FIGURE 2-39. Picture of a clock-and-bias board
84
FIGURE 2-40. Simplified schematic of the clock-splitter board
86
FIGURE 2-41. CAD design of the clock-splitter board
87
FIGURE 2-42. Main panel for programming clock signals for ASIC
88
FIGURE 2-43. Front panel of the CompuGen T30 software
89
FIGURE 2-44. Timing diagram for slow clock signals (a) and fast clock signals (b)... 9^
FIGURE 2-45. Schematic of the circuitry for fixed voltage-level clocks (a) and
variable voltage-level clocks (b)
94
FIGURE 2-46. Schematic of the circuitry for pixel signal and reference signal
transfer
95
FIGURE 2-47. The schematic of the circuitry generating a bias signal
9^
FIGURE 2-48. Sub-panel for triggering multi-frame transfer, generating baseline
tables, and transferring the baseUne tables back to front-end boards. ... 97
FIGURE 2-49. Sub-panel for generating threshold tables and transferring them to
front-end boards
98
FIGURE 2-50. Sub-panel for generating gain tables and transferring them to front-end
boards
99
FIGURE 2-51. Main panel for acquiring projection views
100
FIGURE 2-52. Baseline table variation of eight detectors according to temperature
and high voltage variation
\q2
FIGURE 2-53. Sub-panels for controlling the rotary stage (a) and linear actuator (b). ^04
FIGURE 3-1.
FIGURE 3-2.
Measurement of a point source in a system-matrix grid point
Geometry of pinhole imaging
^06
^08
10
LIST OF FIGURES-CONTINUED
FIGURE 3-3.
FIGURE 3-4.
Normalized
of SemiSPECT along X (a), Y (b), and Z (c) axes,
when the Z axis is perpendicular to the circular slices of the
cylindrical object space
113
Normalized MTFeq of SemiSPECT along X(a), Y (b), and Z (c) axes,
where the Z axis is perpendicular to the circular slices of the
cylindrical object space. On each graph, the dots represent the values
of the MTF^^, and the line represents a Gaussian function closest to
the MTF^^
FIGURE 3-5.
FIGURE 3-6.
FIGURE 3-7.
FIGURE 3-8.
FIGURE 3-9.
FIGURE 3-10.
FIGURE 3-11.
FIGURE 3-12.
FIGURE 3-13.
FIGURE 3-14.
FIGURE 4-1.
Plots of
114
, when ky = -16, kz = 0, and
varies from -16 to 15
for both k and k', with system matrices in 16 (a), 32 (b), and 64 (c)
angular views respectively
Sum of ^^™Tc energy spectra from 121 pixels acquired by summing
neighboring pixel signals
Averaged ^ '"Tc energy spectra of 1, 16, and 121 pixels acquired by
summing neighboring pixel signals
Sensitivity map of SemiSPECT
Signal spheres used for detectability measurement with 8.4-mm,
6.2-mm, 4.7-mm, and 3.1-mm diameters respectively
Tomographic images of the signal spheres with 3.1-mm (a), 4.7-nim
(b), 6.2-mm (c), and 8.4-mm (d) diameters, when the activities of the
signal spheres are the same
Tomgraphic images of the signal spheres with 3.1-mm (a), 4.7-mm
(b), 6.2-mm (c), and 8.4-mm (d) diameters superimposed on the
median-filtered tomographic image of the background with
a 9 x 9 window
Tomographic images of the smallest signal sphere in the whole (a),
half (b), and quarter (c) acquisition time
Tomographic images of the smallest signal sphere superimposed on
the median-filtered tomographic image of the background with
a 9 X 9 window in the whole (a), half (b), and quarter (c)
acquisition time
Detectability versus object diameter (a) and normalized acquisition
time(b)
Geometry of the line phantom
116
Hg
Hg
122
127
128
128
129
129
130
134
11
LIST OF FIGURES-COA^77A^[/£D
FIGURE 4-2.
FIGURE 4-3.
FIGURE 4-4.
FIGURE 4-5.
FIGURE 4-6.
FIGURE 4-7.
FIGURE 4-8.
FIGURE 4-9.
FIGURE 4-10.
FIGURE 4-11.
FIGURE 4-12.
FIGURE 4-13.
FIGURE 4-14.
FIGURE 4-15.
FIGURE 4-16.
FIGURE 4-17.
Tomographic images of the line phantom described in figure 4-1
using ML-EM algorithm with 40 iterations and 0.5-mm spacing
between slices
Voliime rendering of the line-phantom
Picture of a walnut phantom in top (a) and side view (b)
Tomographic images of a walnut phantom acquired by SemiSPECT
with 0.5-mm spacing between slices (a) and a CT system with
0.48-mm spacing between slices (b)
Consecutive transaxial slices of kidneys and a bladder using
^^"'Tc-GLA
Volume rendering of kidneys and a bladder of a mouse imaged by
'^^"Tc-GLA
Volume rendering of a mouse bone imaged by ^^™Tc-MDP
Consecutive transaxial slices of the scan of the mouse cranium
from incisive bone to occipital squama (a) and the mouse
pelvic bone from ilium to ischiac bone (b) with 0.5 mm
separation between slices using ^^™Tc-MDP
Consecutive transaxial slices of the heart scan of mice with
0.5 mm separation between slices using ^^™Tc-MIBI (a)
and ^^"Tc-Tetrofosmin (b)
Volume rendering of mouse hearts imaged by ^^"Tc-MIBI (a)
and ^^"Tc-Tetrofosmin (b)
Picture of a mouse bearing human-breast cancer with about 10-mm
diameter (a) and volume rendering as imaged by ^^"Tc-GLA (b)
Consecutive transaxial slices of the body scan from kidneys to
bladder through the human-breast cancer with 0.5-mm separation
between slices using ^^'"Tc-GLA
Picture of a mouse bearing human-lung cancer with about lO-mm
diameter (a) and volume rendering as imaged by ^^'"Tc-GLA (b)
Consecutive transaxial slices of the body scan from kidneys to
bladder through the human-limg cancer with 0.5 mm separation
between slices using ^^"Tc-GLA
Volume rendering of the human-lung cancer presented in figure
4-11 when a hot pixel existed in a projection view (a) and
after we removed it (b)
Tomographic images of a radioactive cylinder reconstructed with
no disabled columns (a), one disabled column (b), three disabled
columns (c), and five disabled columns (d) at the center of each
projection view
135
I35
135
I37
140
141
^42
^43
I45
I45
147
148
149
150
I53
I54
12
LIST OF FIGURES-CONTINUED
FIGURE 4-18. Flood images from a single camera before (a) and after (b) the
recovery of the disabled column where clock signals pass through
155
FIGURE 4-19. Tomographic images of the line phantom described in figure 4-1
when thresholds for accepting events are set to 60 keV (a), 90 keV (b),
and 120 keV (c), respectively
I55
FIGURE 5-1.
FIGURE 5-2.
FIGURE 5-3.
Cross-sectional view of CT/SemiSPECT Dual-Modality system
SemiSPECT with a linear translator in horizontal
orientation in front (a) and side (b) view
Transaxial view of SemiSPECT including sixteen detector arrays
and a 16-pinhole aperture
159
150
13
LIST OF TABLES
TABLE 2-1.
Features of five commercially available semiconductor materials
for gamma-ray detection in room temperature
TABLE 2-2. Aperture specifications
TABLE 2-3. List of commands according to the signal encodings
TABLE 2-4. Property of each parallel data coming into the Serializer according
to its header
TABLE 2-5. List of operations corresponding to commands
TABLE 2-6. PID-loop parameters used in SemiSPECT
TABLE 2-7. List of clock signals, functions, and voltage levels
TABLE 2-8. List of bias signals, functions, and voltage levels
Planar resolution, total planar resolution, and geometrical parameters
based on 0.5-nim and l-mm diameter pinholes, when the source is
located at the center of the field of view
TABLE 3-2. Spatial resolution by Fourier crosstalk approach along three axes
TABLE 3-3. Energies of K X rays emitted from gold, lead, and bismuth
TABLE 3-4. System parameters and estimated sensitivity based on system
geometry under the assumption that the source is located at the
center of field of view and photons are incident perpendicular
to each detector surface
TABLE 3-5. Sensitivity measured using a point source in a preset time
TABLE 3-6. Sizes, activities, and initial acquisition times for the four
signal spheres
33
53
52
57
79
81
9Q
92
TABLE 3-1.
TABLE 4-1.
108
115
^17
120
123
127
^^™Tc-labelled radiopharmaceuticals used for acquiring mouse images
presented in this dissertation and their apphcations
i3g
14
ABSTRACT
We have completed a new small-animal imaging system, called SemiSPECT, based
on eight pixellated cadmium zinc telluride (CdZnTe) gamma-ray detector arrays. The
detector is a 2.5 cm x 2.5 cm x 0.15 cm slab having a 64 x 64 pixel array. A read-out
application-specific integrated circuit (ASIC) is attached onto the detector via indiumbump bonding, and a -180 V bias is applied onto the detector surface to transport
electron-hole pairs generated by gamma-ray interaction.
Eight detectors are arranged in an octagonal lead-shielded ring. An eight-pinhole
aperture is placed at the center of the ring, and an object is imaged onto each detector
through a pinhole. The object can be rotated about a vertical axis to attain sufficient
angular projections for tomographic reconstruction. The whole system gantry is compact
enough to be placed onto a desktop-sized optical breadboard.
Eight front-end boards were developed to detect events, generate list-mode data
arrays, and send them to back-end boards. Four back-end boards are utilized to hold the
list-mode data arrays and transfer them to a host computer. Eight clock-and-bias boards
provide clock and bias signals to the eight ASICs. Eight control-and-bias boards were
developed to monitor and control the temperatures on the eight detectors, analog and
digital currents suppUed to the eight ASICs, and -180 V biases applied to the eight
detector surfaces.
The spatial resolution provided by SemiSPECT, estimated both based on the system
geometry and via the Fourier crosstalk approach, is about 1~2 mm. The system
sensitivity measured with a point source is about 1.53 x lO""*, and the estimated one from
15
the system geometry is about 1.41 x 10"^. The energy resolution acquired by summing
neighboring pixel signals in a 3 x 3 window is about 10 % full-width-at-half-maximum
for 140 keV gamma rays. The detectabilities for multiple signal spheres simulating
various lesions or organs in a small animal are presented and discussed.
A line-phantom image demonstrates that the spatial resolution achieved after
tomographic reconstruction is on the order of 1 mm^. A walnut-phantom image is
presented to demonstrate how well SemiSPECT reproduces complex structure of an
object and compared with a CT image. Images of various organs of mice, such as bone,
kidney, and myocardium, and human-lung cancer implanted into a nude mouse are
presented and discussed.
16
CHAPTER 1
INTRODUCTION
The use of pertinent animal models is indispensable in biomedical research to
understand disease processes and investigate potential therapies. According to the
diseases and study goals, various animal models have been used. Small animals such as
mice and rats are attractive relative to larger animals due to inexpensive housing and
maintenance cost, rapid breeding cycle, high genetic homology with human, and welldefined genetic backgrounds (Kane, 1998; Cherry and Gambhir, 2001).
Noninvasive, in vivo imaging techniques play an important role in animal research,
enabling longitudinal studies of biochemical, genetic, and pharmacological processes.
Since high spatial resolution and sensitivity are required to analyze the organs of small
animals with equivalent accuracy as human organs are imaged (Green et al., 2001),
commercial and research small-animal imagers that yield better performance have been
developed over the last decade. Currently available noninvasive in vivo imaging
modalities and small-animal imagers developed in our research group will be reviewed in
the following sections.
1.1. Medical imaging modalities
Medical imaging provides information about internal anatomy and physiology of a
biological entity for the purpose of diagnosing diseases or carrying out biomedical
research. Medical imaging modalities can be generally categorized into two divisions:
17
those that yield anatomical information and those that yield functional information. The
imaging modalities classified in the first division include radiography, computed
tomography, and ultrasound. Imaging modalities such as positron emission tomography,
single-photon emission computed tomography, and optical imaging of reporter genes fall
into the second division. Magnetic resonance imaging was originally developed as an
anatomical modality, but functional information can be acquired by modem magnetic
resonance techniques such as fMRI.
1.1.1 Radiography
Radiography was the first medical imaging modality, producing a two-dimensional
x-ray image of the anatomy of an object. The radiation emitted fi-om an x-ray tube is
transmitted through an object. The incident x-rays are attenuated by absorption or
scattering in the object. The denser and thicker structures attenuate more x-rays, resulting
in fewer photons reaching an x-ray film. Since a radiograph is a projection image, it loses
the anatomical information related to the internal structure of the object aligned parallel
to the x-ray beam. So an additional radiograph taken at a different angle is necessary to
determine the location of a lesion in all three dimensions.
Digital radiography, which saves the radiograph in a computer as a digital image, has
several advantages over the conventional radiography. Digital images enable computeraided diagnosis (CAD), which provides a second opinion to the radiologist's estimation,
resulting in the improvement of the diagnostic performance. Also, digital images can be
transmitted through a computer network for a radiologist to interpret the images in a
remote site, and images can be replicated without degrading the quality of the images.
18
Nowadays, the spatial resolution of digital images is comparable to that of analog images.
However, the costs for huge amounts of data to be processed and stored electronically are
significant.
1.1.2 Computed Tomography
Computed tomography (CT) is a radiographic technique to acquire a twodimensional cross-sectional image from
a series of one-dimensional radiographs
collected around the object. A three-dimensional image of the object can be produced
from a stack of the tomographic images as well. The mathematical theory of CT was
introduced by Radon in 1917 (Radon, 1917), but it could not be implemented until the
1970s, because the hardware to collect and process the required data had not been
developed. The first practical CT scanner, EMI Mark 1, was invented by Godfrey
Hounsfield for the study of human head in 1972 (Hounsfield, 1973), and, in the next year,
a whole-body CT scanner was developed by Ledley and his colleagues (Ledley et al.,
1974).
CT was the first imaging modality to portray the complex inner structure of an
object, slice by slice, with high-spatial resolution. A simple CT scanner is composed of
an x-ray tube generating collimated x-ray beams and a one-dimensional array of x-ray
pixel detectors. The detectors measure the intensities of attenuated x-ray beams passed
through the object, resulting in a one-dimensional radiograph. The whole apparatus
rotates around the object, or vice versa, to acquire projections at many different angles.
To reconstruct a tomographic image from the projections, several algorithms such as
19
filtered-back projection (FB) (Radon, 1917) and maximum likelihood-expectation
maximization (ML-EM) (Shepp and Vardi, 1982) have been developed.
1.1.3 Magnetic resonance imaging
Magnetic resonance imaging (MRI) is an imaging technique based on the principle
of nuclear magnetic resonance (NMR). NMR, discovered by Felix Bloch (Bloch, 1946)
and Edward Purcell (Purcell et al., 1946), was used originally to obtain spectroscopic
data of a sample in chemical or biochemical research. But, in 1973, the first MR image
was introduced by Paul Lauterbur (Lauterbur, 1973), and MRI has been well accepted for
clinical and biomedical applications since the 1980s.
MRI provides two- or three-dimensional maps of magnetic moments of certain
element in a biological entity. The most generally imaged element is hydrogen because of
its large magnetic moment and ubiquity in a body. MRI employs three types of external
fields: main magnetic field, radiofrequency field, and linear-gradient magnetic fields. In
the presence of the main magnetic field, the magnetic moment spin of each element has a
propensity to be aligned with the direction of the main magnetic field, and exhibits a
precessional motion at the Larmor fi-equency. When a radiofi-equency field is applied at
the Larmor frequency, the system is perturbed fi-om the equilibrium state, and then, if we
stop applying the radiofi-equency field, the net magnetic moment goes back to the
equilibrium state in the process generating the MR signal that is detected with coils
equipped near the body. A linear gradient magnetic field is applied to enable the spatial
localization in a MR image. MRI provides comparable spatial resolution, but far superior
soft-tissue contrast in comparison to CT. Also MRI is inherently safe for patients.
20
because ionizing radiation is unnecessary in MR imaging. However, conventional MRI
requires expensive hardware and relatively long scanning time, making it difficult to
image a non-stationary object.
MRI can be applied to acquire information related to specific brain functions.
Functional MRI (fMRI) is a recently developed technique to identify the brain regions
activated by cognitive tasks. The amount of oxygen supplied to definite regions of a brain
vary according to each cognitive task (Sherrington and Roy, 1890), and the relaxation
time of hydrogen is slightly changed when it is near newly oxygenated blood (Ogawa et
al., 1990). Therefore the difference between the MR signals with and without a cognitive
task can be a measure of excitatory input (Ogawa et al., 1993; Rees et al., 2000;
Logothetis et at., 2001), and the area responsible for the task can be localized. fMRI also
has provided a view of human cognitive procedures such as memorizing information
(Owen, 1998), recognizing faces (Kanwisher et al., 1997), and experiencing pain
(Ploghaus et al., 1999), and provides good understanding of the neurobiological bases for
drug addiction or gambling (O'Doherty et al., 2001; Breiter et al., 1999).
1.1.4 Ultrasound
Ultrasound imaging maps the acoustic properties of the tissues within a body using
the piezoelectric effect. The piezoelectric effect, conversion between crystal deformation
and electric charge on the crystal surface, was discovered by Pierre and Jacques Curie in
1880 (Graff, 1977), and the diagnostic use of ultrasound imaging started in the 1940's
(Hendee, 1989).
21
A conventional ultrasound imaging system is composed of a transducer and dataacquisition system. The transducer is used to transmit and receive ultrasound (2 to 80
MHz). In the pulse-echo mode, the transducer produces a short pulse of ultrasound
propagating through a body, and some amount of the pulse is reflected fi-om the boundary
between tissues having different acoustic impedances. The reflected pulse, an echo, is
detected by the transducer, and the depths of the boundaries and densities of the tissues
can be estimated from the strength and return times of the echoes, producing a crosssectional image of the anatomy. Ultrasound has shown biological safety for prenatal
imaging, and a system is usually portable and relatively inexpensive. However
information related to biochemical function of the object cannot usually be obtained by
ultrasound imaging.
1.1.5 Optical imaging of reporter genes
Optical imaging of bioluminescent or fluorescent reporter genes is an emerging
imaging technique for research on molecular and cellular changes by diseases such as
cancer or bacterial infection (Edinger et al., 1999; Sweeney et al, 1999; Bhaumik and
Gambhir, 2002).
A gene encoding a fluorescent or bioluminescent molecule is attached to the
promoter of a target gene. The transgenes, called reporter genes, are inserted into sample
cells, and then the cells are injected into experimental animals. The development of these
cells within the organism can be examined by detecting the bioluminescent or fluorescent
light emitted from the reporter genes (Abbas, 2000). Since the emitted light is very dim, a
highly sensitive charge-coupled device (CCD) camera mounted in a black box is
22
employed (Rice et al., 2001). A combination of various bioluminescent and fluorescent
proteins with different colors and properties might be used for better analysis of
complicated physiological systems (Pang, 2002).
1.1.6 Nuclear medicine
Nuclear medicine uses radioactive materials to image biochemical fimction in a
body. Gamma-ray-emitting radiotracers are molecules such as antibodies, substrates,
ligands, and other compounds that have been labeled with a radioactive element. When
injected into the blood stream, they bind preferentially to tissues carrying out specific
biochemical processes. The emitted photons fi-om the molecules are detected by gammaray cameras.
Two different kinds of gamma-ray cameras, scintillator-photomultiplier-tube (PMT)
cameras and semiconductor cameras, are used in nuclear medicine. In scintillator-PMT
cameras, a gamma ray is converted first into visible light by a scintillator, and then into
photoelectrons by a PMT photocathode. The photoelectrons are accelerated and
multiplied in an array of PMTs, resulting in several electrical signal outputs. The position
and energy of a photon coming into this system are estimated by the strength of these
outputs. Because of the small number of photoelectrons produced in the PMT cathode by
each gamma ray, the scintillator-PMT camera suffers from limited spatial and energy
resolutions. On the other hand, since a semiconductor gamma-ray detector produces a
large number of charge carriers by direct energy deposition of a gamma ray, and the
standard deviation of the charge carriers is smaller than that predicted from Poisson
statistics by the Fano factor (Restelli and Rota, 1968), it can yield better energy resolution
23
than the scintillator-PMT camera provides. Gamma rays that have undergone Compton
scattering can be rejected by high energy resolution. A semiconductor-based system can
yield better spatial resolution as well, because the position of a photon strike is
determined by the location of an activated digital pixel. Improved spatial resolution
yields better lesion detection. However, since it is difficult to grow good solid-state
gamma-ray-detector crystals and support a large number of individual detector pixels in a
read-out circuit, the cost to build a well-fiinctioning semiconductor gamma-ray camera is
still high.
The first nuclear medicine device based on a single gamma-ray detector scanning an
imaging plane was developed in the early 1950s, and, in the late 1950s, Anger developed
a stationary position-sensitive planar imager, the Anger Scintillation Camera (Anger,
1958). Using the same technique as in CT, multiple cross-sectional images of an object
could be acquired in nuclear medicine. Nuclear medicine can be subdivided into two
distinct tomographic modalities: positron emission tomography (PET) and single photon
emission computed tomography (SPECT).
The PET scanner has evolved to yield better spatial resolution and sensitivity since
1975. Radionuclides used in PET emit a single positron that annihilates with an electron
within the tissue after it travels a short distance. In this process, two 511 keV gamma rays
are generated, and they travel in almost exactly opposite directions. PET systems
determine an event only when the two photons are detected on two opposite cameras
simultaneously, called annihilation coincidence detection (ACD), establishing the
trajectories of the detected photons. Since it does not require a collimator, PET has much
24
higher photon-collection efficiency than SPECT. But, since the half-lives of the
radionuclides used in PET are generally short, an on-site or nearby cyclotron is needed to
produce the radiopharmaceuticals, which raises the cost of PET imaging considerably.
The first clinically useful SPECT system was built in 1977 (Jaszczak et al., 1977;
Keyes et al., 1977). Unlike PET, radionuclides used in SPECT emit a single gamma-ray
photon. Since the emitted gamma ray can travel in any direction, a SPECT system
requires a collimator to allow detecting only those photons with known trajectories.
SPECT radiopharmaceuticals are usually based on technetium or iodine, whose half-lives
are relatively long, dispensing with the need for an on-site cyclotron that a PET facility
requires.
In our research group, the Center for Gamma-Ray Imaging (CGRJ) at the University
of Arizona, several small-animal SPECT systems, such as FASTSPECT (FAst
STationary Single-Photon Emission Computed Tomography), FASTSPECT II, and
CT/SPECT Dual-Modality system, have been developed. FASTSPECT was developed
originally as a dynamic three-dimensional human brain imager (Rowe, 1991), but this
system was adapted to a small-animal imager by aperture modification (Kastis et al.,
1998). FASTSPECT is based on 24 modular scintillation cameras, each using a 2 x 2
array of PMTs. FASTSPECT II, an updated version of FASTSPECT, consists of two
rings of 8 modular scintillation cameras and list-mode data-acquisition electronics
(Furenlid et al., 2004). Each modular camera designed for FASTSPECT II includes a 3 x
3 array of PMTs. The CT/SPECT Dual-modality system, which combines CT and
SPECT system, was developed to supplement the lack of anatomical features in nuclear
25
medicine (Kastis et al., 2002). This system utilizes a single 64 x 64 Cadmium Zinc
Telluride (CdZnTe) gamma-ray pixel detector (Barber et al., 1997) with a parallel-hole
collimator and a rotational stage to attain sufficient angular projections for tomographic
image reconstruction.
1.2. Focus of the present work
The purpose of this project was to develop a high-resolution SPECT system based on
eight CdZnTe gamma-ray pixel detectors and a multiple-pinhole aperture for smallanimal studies. CGRI developed CdZnTe gamma-ray pixel detectors to substitute for
scintillation technology (Barber et al, 1993; Marks et al., 1996; Barber et al., 1997).
Using a single CdZnTe pixel detector and a parallel-hole collimator, a small-animalplanar imager, called the Spot Imager, was constructed (Balzer, 2002). The Spot Imager
can acquire tomographic images by rotating a small animal about a vertical axis (Kastis et
al., 2002), and it has been used in the CT/SPECT Dual-Modality system. However, a
single-head SPECT system suffers from low sensitivity and requires a large number of
object rotations for tomographic reconstruction. So we decided to build a SPECT system
incorporating multiple CdZnTe detectors that would provide high spatial and energy
resolutions to yield better performance of imaging tasks and enable multiple isotope
imaging for use in biomedical research.
The new small-animal imaging system, called SemiSPECT, has been developed
recently in CGRI. This dissertation includes a review of the CdZnTe detector and the
mechanical design of SemiSPECT (Crawford, 2003), the design and implementation of
26
data-acquisition electronics for SemiSPECT, the development of necessary software and
firmware for system control and data acquisition, the development and evaluation of
trigger algorithms for detecting the presence of gamma rays, the hardware and software
development for temperature control and monitoring function-indicators of the CdZnTe
detectors, physical characterization and task-based assessment of the completed system,
and initial phantom and animal studies.
In Chapter 2, the instrumentation of SemiSPECT is described. The CdZnTe crystal
development, characterization of the detector, design and working principle of the read­
out circuit in the ASIC, and the structure of a CdZnTe modular camera are reviewed. The
geometry and working principle of SemiSPECT and the mechanical components such as
the heat-exchange system, aperture, housing, and rotary stage are introduced. List-mode
data-acquisition electronics and data-acquisition schemes, list-mode data-storage
electronics and firmware to implement the functions for the data storage, control and
status boards and related software for temperature control and monitoring the status of
SemiSPECT, clock and bias boards supplying clocks and biases into the ASIC, and main
software for data control and analysis are described.
In Chapter 3, the characterization and evaluation of SemiSPECT performance are
presented. The volume resolution of the system is defined using the Fourier cross-talk
approach (Gifford, 1997). The energy of a gamma ray interacting in the detector is
estimated by summing neighboring pixel signals (Marks et ah, 1996). The system
sensitivity is measured by using a point source with known activity and the lesion
detectability measured in multiple phantom setups are presented and discussed.
27
In Chapter 4, phantom and animal images taken with SemiSPECT are presented.
Line phantom images demonstrate the spatial resolution of the system, and walnut
phantom images demonstrate the feasibility of complex-organ imaging of small animals.
Many different kinds of organs can be imaged using various imaging agents in nuclear
medicine. Cardiac images, bone images, kidney images, brain images, and lung images of
mice are presented and discussed.
In chapter 5, conclusions from this project are presented, and suggested future
developments and system upgrades are discussed.
28
CHAPTER 2
SEMISPECT
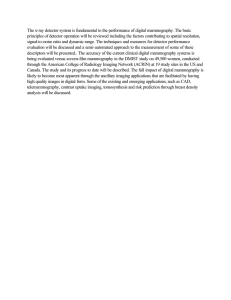
The whole installation of SemiSPECT is shown in figure 2-1. Eight CdZnTe gammaray cameras are arranged in an octagonal lead-shielded ring inside the SemiSPECT
imager. An eight-pinhole aperture is placed at the center of the imager, and an object is
imaged onto each camera through its pinhole. The object can be rotated about a vertical
axis by an automated rotary stage to acquire additional projections for tomographic image
reconstruction. Control-and-status boards are employed to maintain constant low
temperature on each detector and to monitor system parameters. Dry nitrogen is supplied
into the imager to prevent condensation on the electronics. Clock-and-bias boards provide
clocks and biases to the read-out circuits of the cameras and transfer analog signals
acquired from cameras to front-end boards. Front-end boards accomplish list-mode data
acquisition. The data arrays generated from front-end boards are sent to back-end boards
located in the host computer. Back-end boards store the list-mode data and communicate
with the host computer through the PCI bus. Li order not to slow down data processing in
the host computer, we decided to employ a secondary computer dedicated to managing
control-and-status boards. A block diagram of the electronics in SemiSPECT is presented
in figure 2-2.
29
Front-end boards
Clock-and-Bias
boards
Control-and-Status
boards
SemiSPECT
Imager
Power supply I
Nitrogen gas tank
Host computer
Chiller
Secondary
computer
Power supply II
Figure 2-1. Picture of the whole installation of SemiSPECT.
30
Secondary
computer
Clock
Driver
Clock
Host computer
Camera 1 't-¥
C&Sl
C&Bl
FEB 1
Camera 2
C&S2
C&B2
FEB 2
Camera 3
C&S3
C&B3
FEB 3
Camera 4
C&S4
C&B4
i
BEBl
FEB 4
BEB2
— ( (
Camera 5
C&S5
"1-^ C&B5
FEB 5
BEB3
Caniera 6
C&S6
C&B6
FEB6
BEB4
Camera 7
C&S7
C&B7
FEB 7
Camera 8
C&S8 <1-1- C&B8
FEB 8
Control-and-Status
Boards
Clock-and-Bias
Boards
Front-end
Boards
Back-end
Boards
Figure 2-2. Block diagram of the electronics of SemiSPECT.
31
2.1 CdZnTe gamma-ray camera
In the early 1970s, it was recognized that the use of semiconductor gamma-ray
cameras could improve spatial and energy resolution in nuclear medicine (Hoffer et al.,
1971; Kauffman et al., 1973). However, the progress of semiconductor gamma-ray
cameras was very limited for next two decades, because of difficulties in growing largearea detector crystal and the high cost of read-out electronics (Barber et al., 1993; Barber
and Woolfenden, 1996). But, since the 1990s, various solutions for these problems have
been emerged. Crystal boules of multikilogram size have been produced by a crystalgrowing technique known as high-pressure vertical bridgman (HPVB), that has enabled
large semiconductor detectors with fairly uniform response (Raiskin and Butler, 1988).
Also the read-out circuits developed for infrared imaging have been made available at a
reasonable price (Barber et al., 1993; Gaalema, 1985).
CdZnTe detector'
Indium hump bonds
Readout IC
Figure 2-3. Structure of the hybrid of a CdZnTe pixel detector and a read-out ASIC.
32
The gamma-ray camera used in SemiSPECT is a hybrid of a slab of CdZnTe crystal
and a custom read-out application-specific integrated circuit (ASIC) (Augustine, 1994).
The CdZnTe slab is 2.7 cm x 2.7 cm x -0.2 cm. It has a continuous electrode on one side,
and, on the other side, the electrode is partitioned into a 64 x 64 pixel array by
photolithography. The ASIC is cold-welded onto the pixel electrode via indium-bump
bonding. Figure 2-3 illustrates the structure of the hybrid.
2.1.1 Semiconductor detector materials
Good semiconductor detectors have high energy resolution and good gamma-ray
stopping power. In order to exhibit high energy resolution, detector materials need large
charge-carrier mobility and long lifetime, enabling good charge transport, and a large
band gap to reduce leakage current and its associated shot noise. For good gamma-ray
stopping power, large atomic number and high density of detector materials are required.
Table 2-1 lists five cormnercially available semiconductor materials for gamma-ray
detection. Silicon has very large mobility-lifetime products for both charge carriers. But,
since the atomic number of silicon is small, most interactions by gamma rays of energies
larger than 55 keV are Compton scattering in a silicon detector. The mobility-lifetime
products of germanium are even larger than those of silicon, which results in excellent
energy resolution. But, since the atomic number of germanium is relatively small as well,
germanium detectors must be thick to absorb high-energy garmna rays efficiently.
Germanium detectors must be operated at cryogenic temperature (usually less than 100°
K) due to its small band gap, and adequate passivation is necessary because oxide and
33
Si
Ge
Hgl2
CdTe
Cdo.9Zno.1Te
Atomic number
14
32
80, 53
48, 52
48, 30, 52
Density (g/cm^)
2.33
5.32
6.40
5.85
5.80
Band-gap energy (eV)
1.12
0.74
2.13
1.50
1.55
Electron moblility
lifetime: jigTe (cm ^fW)
0.42
0.72
10"^
0.6-3 X 10"^
10'^
Hole moblility
lifetime: jihTh (cm
0.22
0.84
10"^
0.3 ~3 X 10"''
10"^
Photoelectric linear
attenuation coefficient
at 140 keV (cm'^)
0.020
0.72
8.03
3.22
3.07
Table 2-1. Features of five commercially available semiconductor materials for gammaray detection in room temperature (Barber and Woolfenden, 1996).
hydroxide formation on the germanium surface are occurred in air. Therefore, the cost to
operate germanium detectors is high. Mercuric iodide (Hgl2), cadmium telluride (CdTe),
and cadmium zinc telluride (CdZnTe) have large band gaps, good stopping power, and
reasonably high mobility-lifetime products. Hgl2 is, however, a very soft material, so
Hgl2 detectors can be easily damaged in handling. The characteristics of CdTe and
CdZnTe are similar to each other, but CdZnTe has a larger band gap than CdTe (Barber
and Woolfenden, 1996).
34
2.1.2 Detector physics
Figure 2-4 shows the cross-sectional view of a CdZnTe modular camera in
SemiSPECT. When a gamma ray is absorbed in the detector, many electron-hole pairs
are produced. Electrons and holes are separated and moved in opposite directions by the
externally applied high voltage. The movement of the charge carriers induces a current in
nearby pixel electrodes, and the current is integrated by the capacitive-feedback chargesensitive transimpedance amplifier (CTIA) connected to each detector element.
The whole physical process from an initial gamma-ray interaction to signal induction
can be divided into three sub-processes: charge deposition, charge transport, and charge
induction. Charge deposition is the generation of charges due to the absorption of an
initial gamma ray and any subsequent radiation emitted or scattered from the original
interaction site. Charge transport refers to the motion of the charges under the influence
Gamma ray
Continuous
Electrode
High
Voltage
CdZnTe
f^CTlA
Discrete
Electrode
Figure 2-4. Cross sectional view of a CdZnTe modular camera in SemiSPECT.
35
of external bias, Coulomb repulsion, and thermal motion of the crystal lattice. Charge
induction is the generation of signal on the pixel electrodes due to the time varying
charge distribution in the detector.
2.1.2.1 Charge deposition
A gamma ray can interact by coherent scattering, photoelectric effect, or Compton
scattering in the detector. Coherent scattering is a process where a gamma ray impinging
on an atom is scattered without any energy deposition. The photoelectric effect and
Compton scattering are distinguished by whether the energy of a gamma ray is fiilly
deposited to eject an electron. The ejected electron in either case produces a number of
electron-hole pairs due to ionization near the initial interaction site. The mean number of
the electron-hole pairs is proportional to the amount of the deposited energy, but since
some of the energy is dissipated in the form of phonons, some randomness exists in the
total number of the electron-hole pairs even for a fixed deposited energy.
The photoelectric interaction is predominant compared to the other interactions in a
CdZnTe detector when the energy of the incident gamma ray is less than 140 keV
(Marks, 2000). The photoelectric interaction occurs most likely with a K-shell electron
which has the strongest binding energy as kinetic energy. The photoelectron carries away
the initial gamma-ray energy minus the K-shell binding energy. When the K-shell
vacancy is filled, an X ray, called a K X ray, or an Auger electron is emitted in a random
direction, and their energies are typically reabsorbed at a location near the emission site.
Compton scattering produces a scattered photon and a Compton electron. The
scattered photon can be absorbed via the photoelectric effect or undergo Compton
36
scattering again at a different location in the detector. If the K X rays or the scattered
photons escape out of the crystal, the initial gamma-ray energy is not entirely deposited
in the detector causing additional structure to appear on the low-energy side of the energy
spectrum.
2.1.2.2 Charge Transport
Charge carriers under an external bias have a constant drift velocity, v,
v^jxE,
(2.1)
where fi is the mobility of charge carriers and E is the electric field strength. In CdZnTe,
the electron mobility is about 1100 cm^A^-s, and the hole mobility is about 100 cm^/V-s.
Therefore, when we apply -180 V onto a 0.2 cm thick detector, the corresponding
electric-field strength becomes 900 V/cm, and electrons can traverse the detector in ~200
ns, while holes require -2200 ns.
Some of the mobile charge carriers can be trapped at points of crystal imperfections
such as vacancies and impurity atoms, resulting in degradation of the energy resolution.
The probability law of the distance that a charge carrier moves before trapping is
=
,
(2.2)
fizE
where r is the distance moved and T is the trapping time of charge carriers. The parameter
UtE in equation (2.2) is called the drift length, indicating the average travel distance. The
drift length for electrons is about 1.8 cm, and that for holes is about 0.018 cm in a
CdZnTe detector, when the electric field strength is 900 V/cm. The number of charge
37
carriers remaining after a charge could drifts a distance r fi-om the interaction site can be
written as
,
(2.3)
where No is the initial number of the charge carriers in the detector, L is the detector
thickness, and V is the externally applied bias. From equation (2.3), when Z is 0.15 cm,
and V is -180 V, the percentage of the electrons that travel all the way across the detector
is ~89.48 %, and that of the holes is only -0.15 %.
The group of charge carriers, called a charge cloud, expands over time while they are
transported, mainly due to Coulomb repulsion and charge difftision. Charge-carrier
trapping reduces the size of the charge cloud, so the charge cloud of holes is much
smaller than that of electrons in a CdZnTe detector. Detailed equations and simulations
related to the size of the charge cloud in a CdZnTe detector are presented in Marks, 2000.
2.1.2.3 Charge Induction
A signal on an electrode is induced as long as there are moving charges within the
detector, and it is not necessary for the charges to reach the electrode in order to
contribute to the signal. In a single-element detector that has continuous electrodes on
both sides, when the detector width is larger than the detector thickness, and all carriers
have drifted or have been trapped along the way, the net charge stored in an integrating
capacitor connected to the anode of the detector can be computed by the Hecht relation,
38
^
Qi^i) =
where
and
L
, z. ^ eN^Ai, „
^
[1 - exp(- -f-)] +
[1 - exp(
L
^)],
Afj
are the mean-drift length for electrons and holes,
(2.4)
and
are the
initial numbers of electrons and holes created by a gamma-ray interaction, and z,. is the
depth of interaction (Akutagawa and Zanio, 1969).
On the other hand, in a multiple-element detector, whose element size may be
smaller than the detector thickness, the net charge integrated for a certain time T in the
pixel electrode can be written by Gauss's theorem as
"
'm
(2.5)
dz
where e is permittivity of the detector material,
, T) is the potential at point r due to
the charge density in the detector, and the integral is over the area of the pixel electrode.
Equation (2.5) means that the area integral of the surface charge density is equal to the
induced charge on the electrode. In order to calculate the potential ^(r,t), Green's
theorem can be used (Eskin et al., 1999; Barrett and Myers, 2004). When we assume that
the charge density changes over time so slowly that
can be calculated by the
equations of electrostatics, equation (2.5) can be rewritten by Green's theorem as,
(^0 )9(^0 ' T) ,
(2.6)
V
where V is the volume of the pixel detector and
(2.7)
39
where pir,?^) is a Green's function representing the potential at r produced by a point
source at
in the volume V and Lz is the longitudinal position of the pixel electrode. The
(FQ) is called a weighting potential or just weighting function.
Due to charge-carrier trapping in CdZnTe detector, the strength of the induced signal
is strongly dependent on the interaction depths of gamma rays. When a negative bias is
applied on the cathode of the detector, the nearer to the anode of the detector the
interaction is, the less signal is induced because of severe hole trapping. Also, if the
interaction occurs just outside the pixel boundary and near the anode, a negative signal on
the pixel can be induced (Eskin et al., 1999).
2.1.2.4 Detector imperfection
A common defect when polycrystalline materials such as CdZnTe are grown is a
crystal grain boundary generated when two grains with different orientations meet. If a
gamma ray is absorbed at the grain boundary, the transport of the generated charge
carriers is decreased or shifted to neighboring pixels due to the boundary intercept. The
intergrowth of two or more crystal segments, called twins, often occurs in CdZnTe as
well, resulting in areas with lower resistivity. Furthermore the inhomogeneity of the
crystal can cause the concentration of the mobile charge carriers onto certain pixels.
Various material imperfections that might be present in CdZnTe are discussed in Hilton
et al., 1999.
40
2.1.3 ASIC
The appHcation-specific integrated circuit (ASIC) attached to the detector slab is
employed to read out signals from pixel detectors and send them to external electronics.
The ASIC includes a number of read-out units and multiplexing circuitry. The schematic
of a read-out circuit is shown in figure 2-5. The read-out circuit can be broken down into
a capacitive-feedback transimpedance amplifier (CTIA) and a correlated double-sampleand-hold stage (CDSH). The current produced from a pixel detector is accumulated in the
capacitor,
of the CTIA, and the charge on
Cm is removed by
the reset switch at the
end of each integration period. Even though the reset switch is closed, since the reset
switch is not a perfect short circuit, high-frequency voltage fluctuations,
called kTC
noise, can exist in C/„, (Barrett and Myers, 2004). The standard deviation of the voltage
Reset Switch
off
Clamp
Switch
-off
SH Switch
To Column Bus
OpAmp
CTIA
CMOS
buffer
CDSH
Figure 2-5. Schematic of read-out circuitry in ASIC.
CMOS
buffer
41
fluctuations is -sJkgT / C , where ks is Boltzman constant, T is the temperature on Cmt,
and C is the capacitance of Cmt. hi order to acquire a high voltage for a small amount of
charge, a capacitor with only 60 fF is used for
in our application, so the CTIA has
high kTC noise. To reduce the kTC noise, a clamp switch and a capacitor, Cd, are
utilized. At the beginning of each integration period, the clamp switch is closed to set the
voltage on node C to the bias, Vd, and then opened. Because no current flows through the
CMOS buffer in the CDSH circuit while the pixel signal is integrated in C,„,, the voltage
on the node C is increased approximately to the voltage increment on node B. Therefore,
at the end of the integration, the voltage on node C becomes the initial offset voltage, Vd,
plus the accumulated voltage excluding kTC noise. The voltage on node C is saved into
capacitor, Cd, by the sample-and-hold switch (SH switch) and then read out by
multiplexing.
Figure 2-6 shows a simplified schematic of the multiplexer in ASIC, and figure 2-7
illustrates the scheme for reading out pixel signals. Read-out unit cells are arranged in a
64 X 64 array, and signals from those unit cells are read out onto the signal bus in a
pattem of raster-scanning, implemented by the shift registers that results in a video-like
stream. Each column-sample-and-hold buffer (column SHE) gives out a reference signal
as well as a pixel signal at the same time. The reference signal will be subtracted from the
pixel signal in a front-end board to get rid of common-mode noise that might be present
in the ASIC or cables.
42
Row shift
register
Row shift
register
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Read-out
Unit Cell
Column
SHB
Column
SHB
Column
SHB
Column
SHB
Row shift
register
Reference
cell
REF
SIG
Column shift
register
Column shift
register
Column shift
register
Figure 2-6. A simplified schematic of the multiplexer in the ASIC.
43
(a)
Figure 2-7. Pixel signals in a frame scanned in a raster-scanning pattern (a) and the
resulting video stream (b).
2.1.4 Daughter board and doughnut board
A daughter board works as an electrical interface between the ASIC and external
electronics. A hybrid is mounted on the top surface of a daughter board using a lowmelting-temperature wax, and wire bonding is used for electrical connection between the
ASIC and the daughter board. Since the wires are very tiny and easily damaged, care
must be taken in handling. On a daughter board, decoupling capacitors, bias resistors, and
signal transistors are mounted, and a ribbon cable is soldered for interconnection between
the daughter board and external electronics. Figure 2-8 shows a daughter board with a
mounted hybrid.
Another electrical interface between a daughter board and external electronics, called
the doughnut board, is necessary for SemiSPECT. Several connectors are mounted on a
doughnut board to pass signals through eight daughter boards simultaneously. Figure 2-9
shows a picture of a doughnut board.
Figure 2-8. Daughter board with a mounted hybrid.
Figure 2-9. Picture of a doughnut board.
45
2.2. Mechanics
The CAD design of the mechanical components in SemiSPECT is presented in figure
2-10. The mechanical structure of SemiSPECT is composed of four main sub-systems:
the cooling system, a multiple-pinhole aperture, the shielded housing, and an automated
stage for a small animal. The eight CdZnTe detector modules are arranged on an
octagonal heat sink made of copper. A thermo-electric cooler (TEC) is attached onto the
bottom of each detector module, and the TEC transfers heat from the detector to the heat
sink. The heat transferred to the heat sink is pimiped out of the imager by coolant
circulating around the heat sink. A cylindrical Cerrobend-shielded aperture having eight
pinholes is located at the center of the octagonal ring. The aperture is exchangeable to
vary spatial resolution and sensitivity of the system. When we take out or put in an
aperture, the retaining clips prevent the aperture from bumping and damaging the
detectors. The housing, shielded by lead, protects and supports the detector modules and
heat exchanger, prevents background gamma-rays from coming into the system, and
blocks out-going gamma-rays from
the inside of the imager minimizing radiation
exposure to a system operator. The automated small-animal stage includes two motionpositioning systems: a vertical franslation system and a rotation system. A side view and
top view of the imager are shown in figure 2-11 and figure 2-12 respectively. The
mechanical design of SemiSPECT imager was mainly accomplished by Michael
Crawford, a former graduate student in our research group, and more detailed description
of the design is available in Crawford, 2003.
Vluminum housing
shielded b\ lead
g.
pi '
Kif^ht d e t e c t o r
modules
Retaining clips
protecting detectors
i
»
A
Copper heat sink'
^ wrapped by
a copper tube
Figure 2-10. CAD design of the mechanical components in the SemiSPECT
imager (Crawford, 2003).
Figure 2-11. Side view of the SemiSPECT imager and animal stage.
Figure 2-12. Top view of the SemiSPECT imager.
48
2.2.1. Cooling system
The coohng system permits the operation of the CdZnTe detectors at a low and
constant temperature, usually in the range from 10° to -10° C, in order to reduce leakage
current that would degrade the quality of images and to remove heat generated by the
ASIC (Balzer, 2002). Every daughter board is mounted on a cold plate made of an 80/20
copper/tungsten alloy, which conducts heat toward a TEC and works as a shielding for
gamma-rays. The TEC pumps heat from the cold plate to a base plate, and the pumping
rate is managed by the secondary computer and a control-and-status board. The base
plate, made of copper, serves as an interface between the TEC and the heat sink. Siliconebased thermal grease is placed on each plate to facilitate the heat transfer. The CAD
design of a daughter board, a cold plate, a TEC and a base plate is presented in figure 213, and a detector module is shown in figure 2-14.
Detector
Cold plate
TEC
Base plate
Figure 2-13. CAD design of the components in a detector module (Crawford, 2003).
49
Figure 2-14. Picture of a detector module.
The heat sink was wrapped by a copper tube having 1/8-inch inner diameter. The
tube was soldered to the heat sink to maximize the heat-transfer efficiency. The ends of
the tubing are facing out of the system, and they are connected to tygon tubes attached to
a liquid chiller. The chiller pumps a coolant, a water-glycol solution, through the copper
tube, cooling down the heat sink. To prevent condensation on the electronics caused by
the low temperature of the imager, dry nitrogen gas at positive pressure pushes any vapor
present out of the system. The copper tube was surrounded by a vapor barrier to minimize
heat transfer between the nitrogen gas and the tube, and condensation on the tube. The
CAD design of the copper heat sink and copper tubing is presented with the doughnut
board support, where the doughnut board is placed, in figure 2-15. The block diagram of
the cooling system for a single modular camera in SemiSPECT is shown in figure 2-16.
50
DouLMinut h o a r d
su pport
C opper heat sink
C o p p e r tubiii <i
Figure 2-15. CAD design of copper heat sink, copper tubing,
and doughnut board support (Crawford, 2003).
Control-and-status
board
NI 6024E-PCI
Multifiinction I/O
Copper tubing
Temperature
Sensor
(AD590)
r
Recirculating
Chiller
Detector
Cold plate
Heat sink
Base plaie
Secondary
computer
Thermoelectric cooler
Figure 2-16. Block diagram of the cooling system for a single modular camera
in SemiSPECT.
51
2.2.2. Aperture
The energy range of gamma rays used in SPECT is usually from 80 to 500 keV.
Since photons with higher energy than 20 keV are not able to be refracted by
conventional optics (White, 1994), adequate shielding and apertures are essential to
determine the frajectory of rays in a SPECT system.
Figure 2-17 shows the picture of two different-sized apertures for SemiSPECT. Each
aperture is composed of an outer frame, shielding, and gold-pinhole inserts. Cerrobend,
an alloy having a low melting point (158° F), was cast as a shielding on the inner surface
of the aluminim frame. Because of the difficulties in directly machining precise pinholes
in the Cerrobend cylinder, eight gold disks having a 0.5 mm-diameter pinhole, 90°
acceptance angle, and 2-mm thickness were inserted. Figure 2-18 shows the inserts on the
aperture.
The efficiency of several pinholes on a cylinder aperture is given by
where n is the number of pinholes, d is the pinhole diameter, and d d ^ s the diameter of the
aperture cylinder. However, since some photons can penetrate though the pinhole rim
without interaction and reach the detector, the effective pinhole size can be larger than
the real one. Anger and Paix infroduced an equation to calculate the effective pinhole
diameter.
(2.9)
Figure 2-17. Picture of two apertures.
Figure 2-18. Picture of the gold inserts on the aperture.
53
Large aperture
Small aperture
Diameter
(Pinhole to pinhole)
82.5 mm
64.7 mm
Magnification
0.4
0.8
Field of view
(Radius x Height)
31.2 mm x 62.4 mm
16.0 mm X 32.0 mm
Actual pinhole diameter (d)
0.5 mm
0.5 mm
Effective pinhole diameter (de)
0.77 mm
0.77 mm
Efficiency of eight pinholes
calculated with de
1.74 X 10"^
2.83 X 10"^
Table 2-2. Aperture specifications.
where fiph represents attenuation coefficient of pinhole material and a is the acceptance
angle of the pinhole (Anger, 1967; Paix, 1967). The value of fiph for 140-keV photons in
gold is 42.65 cm"\ and a is 90°, so the effective pinhole diameter becomes approximately
0.77 mm. Table 2-2 presents the mechanical features and eight-pinhole efficiencies
calculated with the effective pinhole diameters of both apertures.
2.2.3. Small-animal stage
Figure 2-19 shows a simplified cross-sectional view of the small-animal stage built
for SemiSPECT. A mouse holder, an acrylic tube holding a mouse, was placed atop a
linear actuator mounted on an automated rotary stage. The range of vertical translation is
5" with a resolution of 0.000625", and the rotary stage has an angular resolution
increment of 0.025°. Each motor is managed by LabVIEW software in the host computer
54
Anesthesia tube
Mouse holder
13.125
Linear
actuator
Rotary
j
\
Figure 2-19. Cross-sectional schematic of the small-animal stage built in SemiSPECT.
55
and a programmable-stepping-motor controller produced by Velmex, Inc. The prototype
of this mouse stage was designed by William C. J. Hunter, a current graduate student in
our research group.
56
2.3. Front-end board
We have built eight front-end boards for list-mode data acquisition with SemiSPECT.
Figure 2-20 shows the block diagram of a front-end board. An analog-to-digital converter
(ADC) is used in differential mode, and four SRAMs are employed to hold baseline
values, gain values, threshold values, and pixel signals, respectively. A baseline value is
an average integrated leakage current. A threshold value is a criterion to determine events
in a pixel. A gain value is used currently to activate or deactivate a single pixel detector.
The pixel clock determines the incoming rate of pixel signals, and the rising edge of the
frame trigger indicates the beginning of a newly updated frame. A field-programmable
gate array (FPGA) loads these four values at every falling edge of the pixel clock and
judges whether the pixel signal contains photon energy. Detailed event triggering
Pixel-SRAM
Pixel signal
Reference signal
LED
ADC
Pixel clock
FIFO
FPGA
Frame trigger
Serializer
Baseline-SRAM
t
Threshold-SRAM
t
Gain-SRAM
Figure 2-20. Block diagram of a front-end board.
57
schemes will be discussed in section 2.3.2. If an event is determined, a 3 x 3 list-mode
data array, including neighboring pixel signals as well as the largest central pixel signal,
is generated. Since the peak output frequency of the list-mode data produced from the
FPGA is too high to be processed by the serializer directly, a first-in, first-out
buffer
(FIFO) is employed. The list-mode data arrays are stored in the FIFO first, and then
transferred to the serializer one byte at a time. The serializer transforms parallel list-mode
data to a serial data sfream and sends it to a back-end board through an Ethernet-type
cable. A front-end board can receive data transmitted from a back-end board as well.
2.3.1. Hardware in front-end board
Figures 2-21 and 2-22 show pictures of a front-end board and eight front-end boards
arranged in the rack, respectively. Each board is operated under the control of an FPGA.
The FPGA includes an array of identical logic cells, and each logic cell and connections
between the cells can be programmed by VHDL, a hardware-description language, to
implement specific fiinctions.
We use model 'OR3T125-7 PS240' manufactured by
Lucent Technologies. The flash memory, a programmable and erasable read-only
memory, can contain up to 262,144 bytes. When the FPGA is switched on, the program
stored in the flash memory is read out to the FPGA. The ADC digitizes the difference
between the pixel signal and the reference signal to 12-bit accuracy. The signal difference
should lie within a ±2 V range, and digitization occurs at every rising edge of the pixel
clock. The output signal delay of the ADC is around 13 ns. The memory size of each
SRAM is 32,768 x 16 bits, and data accessing time is about 10 ns. Eight LEDs are
58
Pixel signals
FIFO
Serializer
Pixel clock
Frame clock
Pixel Signal
Reference
Signal
Baselines
Threshold
Gain
FPGA
Flash memory
Figure 2-21. Picture of a front-end board.
II
Figure 2-22. Picture of eight front-end boards in the rack.
59
mounted on the backside of the front-end board. Currently they indicate whether the
VHDL program is properly loaded to FPGA, but they are very usefiil for debugging
program errors or hardware defects as well.
List-mode data arrays are written into the FIFO at a 66 MHz rate and then read out to
the serializer through the FPGA at a 16.5 MHz rate. Since the FIFO can only hold 8,192
bytes, and each list-mode data array contains 16 bytes, not more than 720 consecutive
events can be processed per frame when the pixel clock frequency is 3.57 MHz. But, we
usually image objects generating less than 50 events per frame, because some events start
piling up spatially if the number of events per frame is bigger than 50 (Furenlid et al.,
2000). So, in practice, the FIFO does not miss any data.
The serializer transforms 10-bit wide parallel data arrays into a low-voltage
differential-signaling (LVDS) serial data stream and transfers it to a deserializer in a
back-end board. Before transferring any data, the data-transmission clock (TCLK) of the
serializer must be synchronized with the data-receiving clock (RCLK) of the deserializer.
When the front-end
board is powered on, the serializer transmits SYNC patterns,
composed of six ones and six zeros switching at every rising edge of the TCLK, to the
deserializer for 1 ms. The deserializer generates an RCLK synchronized with the TCLK
using the SYNC patterns and a reference clock provided in the back-end board, whose
frequency is set to be close to the frequency of TCLK.
Figure 2-23 illustrates the signal input and output of a front-end board. In this figure,
J1 represents the connector for an Ethernet cable, which includes one ground and seven
signal-transmission lines. The two lines labeled Dout+ and Dour are used to send the
60
Opto-isolator
TLP2630
DataPC_encoder(2)
aaa^
DataPC_encoder(l)
* * «-
DataPC_encoder_dly(2)
DataPC_encoder_dly(1)
DataPC encoder(O)
DCLK
DataPC_encoder_dly(0)
DATAPC
DCLK_dly
GND
TLP2630
DATAPC_dly
Ethernet
Cable
TLP2630
+5 V
Inverter
Opto-isolator
Pixel_clock_dly
Pixel clock
PS9701
+5 V
SN74AHC1G04
Frame-trigger_signal_dly
Frame-trigger
signal
SN74AHC1G04
PS9701
J4
J3
• Pixel signaP^]!>
CZ
Reference
signal
Figure 2-23. Schematic of signal input/output.
61
Data]PC encoder
(2)
(0)
(1)
c
C
C
1
C
C
c
c
1
1
c
1
c
1
c
1
1
c
1
1
c
Command
Stop any functions
Start list-mode data acquisition
Generate a new baseline table
Reset FPGA
Transfer pixel signals of multiple frames to back-end board
Generate a new gain table
Generate a new threshold table
Table 2-3. List of commands according to the signal encodings.
LVDS
serial
data
stream
to
a
back-end
board.
The
three
lines
labeled
DataPC encoder(0), DataPC_encoder(l), and DataPC_encoder(2) are used to transfer
commands from a back-end board, triggering various functions in a front-end board.
Table 2-3 lists the commands corresponding to signal encoding. The description of each
function will be presented in section 2.3.2. The serial data stream and clock from a backend board come through the two lines labeled DATAPC and DCLK. The pixel clock and
frame trigger are originated from a clock generator, 'CompuGen 3250', manufactured by
GAGE Applied Sciences Lie., and each signal is split into eight equivalent signals in the
clock-splitter board and then supplied to eight front-end boards. The clock-splitter board
will be described in section 2.6. Every single digital signal coming into a front-end board
goes through an opto-isolator to prevent damaging any electronics by sudden high current
and to prevent noise pickup from the computer's ground.
Figure 2-24 shows the CAD design of a front-end board completed by the PC-boarddesigning software 'UltiBoard'. A front-end board is composed of six layers: top, bottom,
and four power layers. All electronic components and traces are placed on the top and
bottom layers. The first power layer supplies +5 V for analog devices, and the second
62
Figure 2-24. CAD design of a front-end board.
one is partitioned into three areas to supply +3.3 V, additional +5 V for digital devices,
and -5 V for analog devices. The third and fourth layers are used for digital ground and
analog ground, respectively. The size of a front-end board is 4" x 5.25".
2.3.2. VHDL firmware in front-end board
Before starting list-mode data acquisition, a front-end board requires a baseline table,
a threshold table, and a gain table. Each table is composed of a 64 x 64 array representing
63
the 64 X 64 pixels, and boundary values set to all zeros that surround the actual data
array. Each value is composed of 12 bits. The baseline and threshold tables are calculated
from the pixel signals of multiple frames and then transferred from the back-end board in
the host computer. A gain table is generated in the host computer as well. Initially, a gain
table includes all zeros, and, when a noisy pixel needs to be disabled, the value at the
noisy pixel's address is set to 1. Each table is transferred back to the front-end board and
saved into an SRAM. During gain-table transfer, only a single bit is transmitted as a gain
value. 'FFFh' is saved into the lowest 12 bits of a 2-byte signal value in the gain-SRAM
when the gain command is zero, otherwise 'Oh' is saved.
In order to implement the pixel-signal transfer of multiple frames, a 9-bit data value
specifying the total number of frames is sent to the front-end board first. The maximum
frame number is currently 256. As discussed in section 2.3.1, it is difficult to transmit
pixel signals to back-end board directly due to the frequency difference between TCLK
and pixel clock. So pixel signals of each frame are buffered in the pixel-SRAM first and
then transferred to the back-end board. This procedure is repeated until all requested
frames are sent.
Figure 2-25 exhibits a table stored in each SRAM (a) and the scanning order (b). The
64 X 64 actual values are placed within the dotted line and surrounded by the boundary
values. The number on each box represents the address of each signal buffer in the
SRAM. The FPGA loads a pixel signal, a baseline value, and a gain value located at each
address in a 3 x 3 window and then calculates a net pixel signal by
Net signal = {rawpixel signal — Baseline value) AND Gain value,
(2.10)
64
when the logical operator AND is applied bit-by-bit. All nine net signals of the window
are summed up and then compared to a threshold value set to several standard deviations
of the sum of nine baseline values of the window. The reason for summing the nine
signals is to gather all photon energy that might be diffused to neighboring pixels. Then
we check again whether the net signal at the center of the window is the largest, in order
to prevent multiple triggers despite having only one gamma-ray interaction within the
window. If these two conditions are satisfied, an event is determined, and the nine net
signals are sent to the back-end board.
0
1
2
3
4
5
6
63 64 65
0
1
2
66
67 68 69 70 71 72
129 130 131
66
67
68
132 133 134 135 136 137 138
195 196 197
132 133 134
•••
I
198 199 200 201 202 203 204
261 262 263
1
2
3
264 265 266 267 268 269 270
327 328 329
67
68
69
133 134 135
I 4027
•••
•
•
•
I
2
3
4
68
69
70
4028 4029 4030 4031 4032
4089 4090 4091
134 135 136
4092 4093 4094 4095 4096 4097 4098
4155 4156 4157
•
•
4221 4222 4223
I
4158
4159 4160 4161 4162 4163 4164
4224
4225 4226 4227 4228 4229 4230
•••
4221 4222 4223
4290 4291
4287 4288 4289
4353 4354 4355
4292 4293 4294 4295 4296
(a)
4287 4288 4289
4353 4354 4355
(b)
Figure 2-25. Schematic of a 66 x 66 table in each SRAM (a) and the scanning order (b).
65
Figure 2-26 shows a clock diagram to illustrate how the list-mode data acquisition is
implemented within a single pixel clock period of 280 ns. hi timing section A, a new
pixel signal is acquired and saved into the pixel-SRAM. hi timing section B, the signal,
baseline value, and gain value for the pixel located at the first row and third column of
the 3 X 3 scanning window are loaded, and its net signal is calculated. In timing section
Pixel clock (3.57 MHz)
SCLK (33 MHz)
MM
I
I
I
I
I I
!III
I
I
LAI
B ^
IZC
E
I I I I I •
III III iII III III .I II II II II II I>
I IIIBKIK
I I I I I I I
aOZE
D
A: Save new pixel signal into the raw-SRAM.
B: Load a baseline value, and a gain value located at the first row and the
third column of the 3 x 3 scanning window, and calculate net signal.
C: Load a baseline value, a gain value, and a threshold value located at
the second row and the third column of the 3 x 3 scanning window,
and calculate net signal.
D: Load a baseline value, and a gain value located at the third row and the
third column of the 3 x 3 scanning window, and calculate net signal.
E: Sum all nine net signals.
F: Check event.
D0~D16: Send a 16-Byte list-mode data array to FIFO.
Figure 2-26. Clock diagram illustrating list-mode data acquisition.
66
C, the signal, baseline value, gain value, and a threshold value for the pixel located at the
second row and third column of the window are loaded, and its net signal is calculated.
The newly loaded threshold value is held to be used in the next scanning window, hi
timing section D, the signal, baseline value, and gain value for the pixel located at the
third row and third column of the window are loaded, and its net signal is calculated, hi
timing section E, the newly acquired three net signals and previously acquired from the
prior window location six net signals are summed up. hi timing section F, we check
whether the sum the nine net signals is larger than the threshold value acquired in the
prior scanning window, and whether the net signal at the center of the window is the
largest. If both conditions are satisfied, a 16-byte list-mode data packet, containing a 7-bit
header, a 13-bit center-pixel address, and the nine 12-bit net signals, is generated. Each
byte of the data packet is written into the FIFO in timing sections DO to D15. Since the
required data-acquisition time is longer than a pixel clock period, a pipelining scheme is
employed. The header of a list-mode data packet is'1111111'.
A 1-word checksum is appended to each list-mode data array to detect transmission
errors. The checksum is calculated by
Checksum = {Data O XOR Data_2) XOR {Data 3 XOR Data_4),
(2.11)
where Data represents one 32-bit word of the list-mode data packet. So the change of a
single bit can be detected by comparing the checksum transmitted from the front-end
board and one calculated in the host computer.
Once a front-end board is powered on, counting of the number of incoming frames is
started. The count is held in a 28-bit signal register in the FPGA. If at least one event
67
occurs in a frame, the frame count is transmitted to the back-end board at the end of the
frame with a 4-bit header. The frame count enables temporal division for events with
about 1-ms precision. The header of the frame count packet is '1010'.
Each 10-bit parallel data coming into the serializer contains a 2-bit header, which
indicates whether the following 1-byte data is valuable. The serializer must transmit data
to the back-end board all the time in order not to lose clock synchronization with the
deserializer. So, if no true data is available to be sent, a 1-byte dummy data word
composed of all zeros is transferred. Table 2-4 lists the 2-bit header codes and what 1byte parallel data property they represent.
Header
Data
"11"
The first byte of a list-mode data array or a frame count
"00"
The following byte of a list-mode data array or a frame count
"01"
Dummy data
"10"
Table 2-4. Property of each parallel data coming into the serializer according to its header.
68
2.4. Back-end board
Figure 2-27 shows the block diagram of a back-end board. The back-end board was
designed by Prof. Lars Furenlid to manage list-mode data from a variety of gamma-ray
camera technologies. Each deserializer receives a LVDS serial data stream transmitted
from a front-end board and converts it to a 10-bit wide parallel data. The FPGA saves the
data into a memory buffer, and the host computer can download it through the PCI bus.
The host computer can transmit data to the front-end board via the back-end board or
write data into the memory buffers in back-end board as well. To receive eight list-mode
data streams simultaneously, four back-end boards are used in SemiSPECT.
Deserializer I
1-MW Memory I
FPGA
Deserializer II
1-MW Memory II
PCI Bus
Figure 2-27. Block diagram of a back-end board.
69
2.4.1. Hardware in back-end board
Figure 2-28 shows a picture of a back-end board. This board is controlled by an on­
board FPGA, 'OR3TP12-6 BA352', manufactured by Lucent Technologies. When the
host computer is switched on, the FPGA loads the VHDL program stored in the flash
memory. Each memory buffer is composed of eight SRAMs with 1,048,576 x 4 bits, and
the data accessing time is around 12 ns. When a deserializer is synchronized with a
serializer in a front-end board, a pin called LOCK on the deserializer is driven low,
indicating that the data coming out of the deserializer is valid. A back-end board
LEDs
Deserializer I
1-MW Memory I
1-MW Memory II
Channel
A
Channel
B
Deserializer II
Flash memory
FPGA
Figure 2-28. Picture of a back-end board.
PCI Bus
70
includes seven LEDs. LEDl indicates whether the VHDL program is properly loaded
into the FPGA. LED2 is turned on if the first deserializer loses clock synchronization,
otherwise LEDS is on. Similarly, if the second deserializer loses clock synchronization,
LEDS is turned on, otherwise LED6 is on. LED4 or LED7 indicates whether data is being
transmitted to a front-end board through channel A or B respectively.
2.4.2. VHDL firmware in back-end board
Data coming from a deserializer is saved into a memory buffer, after its validity is
checked by the signal status on the pin LOCK of the deserializer. The 32 bit PCI bus is
used to transfer commands or addresses of memory buffers from the host computer. The
address range for the first memory buffer is from 'OOOOOOOOh' to 'OOOFFFFFh', and that
for the second memory buffer is from 'OOlOOOOOh' to 'OOlFFFFFh'. However, when the
22"^ bit is set to one, it is recognized as a command to trigger an operation in a back-end
board. Table 2-5 lists the operations corresponding to each command. The command.
Command
00200000h
00200001h
00200002h
00200003h
00200004h
00200005h
00200006h
00200007h
Operation
Read the address pointer of the Memory I to find number of bytes stored
Read the address pointer of the Memory II to find number of bytes stored
Transfer data to a front-end board through channel A
Transfer data to a front-end board through channel B
Control data acquisition through channel A
Control data acquisition through channel B
Read the signal status on LOCK of the deserializer I
Read the signal status on LOCK of the deserializer II
Table 2-5. List of operations corresponding to commands.
71
'00200000h' or '00200001h', reads out the address pointer of memory buffer A or B. The
command, '00200002h' or '00200003h', is used to transfer data to a front-end board. The
command, '00200004h' or '00200005h', controls whether the FPGA transfers data from
a deserializer to a memory buffer and prepare communication between the host computer
and the memory buffer. The command, '00200006h' or '00200007h', reads out the signal
status on the LOCK pin of a deserializer.
72
2.5. Control-and-status board
Figure 2-29 shows the control-and-status board designed by Prof. Lars Furenlid in
our research group. Figure 2-30 shows eight control-and-status boards coupled with eight
clock-and-bias boards in a rack. Bias and clock signals generated in each clock-and-bias
board are supplied to an ASIC via the coupled control-and-status board. A detailed
description of the clock-and-bias board will be presented in section 2.6. Each controland-status board has three main fimctions: monitor and control of temperature on a
detector, monitor and control of analog and digital currents supplied to an ASIC, and
monitor and control of high voltage apphed to the detector electrode.
n a:"
ly
Figure 2-29. Picture of a control-and-status board.
73
( lockaiul-bias
board
Figure 2-30. Picture of eight control-and-status boards and eight clock-and-bias boards
in a rack.
2.5.1 Hardware in clock-and-control board
The secondary computer communicates with each control-and-status board in turn
through a single multifunction I/O board, PCI-6024E from National Instruments. The
circuitry in figure 2-31 triggers communication between the secondary computer and a
74
control-and-status board. Each board is given an address by an on-board eight-position
DIP switch, and the secondary computer transfers a 3-bit encoded address to select the
board of interest. If the address of a DIP switch on a board is coincident with that sent
from the secondary computer, the signal ADDR goes high to enable communication, and
the LED labeled Address is lighted.
Before operating the control-and-status board, we need to ensure that the clock-andbias boards are powered up. Figure 2-32 shows the schematic to confirm the power status
of a clock-and-bias board. The +5 V supply of a clock-and-bias board is fed to a controland-status board through connector J3. When the clock-and-bias board is on, the output
signal CBON i\xms low. It is also sent back to the secondary computer to be monitored.
J1
+5V
Address
Opto-isolators
Address_0
Address_l
Address 2 •
PS9701
t-aaa/
Inverter
3-bit
Decoder
PS9701
74AHCT04
-t>ci^DDir>
74138
GND
PS9701
DIP switch 74AHCT04
Figure 2-31. Circuitry for choosing a control-and-status board to communicate with the
secondary computer.
75
+5V
Opto-isolator
+5V
GND
PS9701
CMOS Switch
Clock-and-bias board ON
•o" bMAX4845
Figure 2-32. Schematic for reading the power status of a clock-and-bias board.
The schematic of the circuitry for monitoring and controlling temperature of a
detector is shown in figure 2-33. A temperature sensor, AD590, epoxied on a daughter
board of each modular camera, produces current linearly proportional to its absolute
temperature. The current flows via connector J8, and it is converted into voltage in a
differential amplifier stage. The voltage is sent to the secondary computer and then
translated back to temperature. The temperature is displayed on the user's monitor and
utilized by temperature-control software that calculates an updated TEC current to adjust
the temperature to a set point. The new TEC current value is converted into a 12-bit serial
data stream and transmitted to the control-and-status board. A digital-to-analog converter
(DAC), MAX531, transforms the digital data to an analog signal. The analog signal goes
through a 10:1 voltage divider, and then the op-amp regulates the TEC current to make it
76
Temp (+)
+5V
Temp (-)
+5.V
LMV358M
-5V
LM7301M5
Temp
+5V
CMOS Switch
Opto-isolators
Data
—AAA/
Inverter 74-4hcto8
PS9701
Clock
D/A
Converter
Chip
'^WV
Select
LM7301M5
PS9701
74AHCT04
74AHCT0 MAX531
Darlington
transistor
AND Gates
PS9701
Clear —WV
FZT603
GND
PS9701
+15VFZ' r603
-TE
T/E(+)
+TE
LM7301M5
T/E (-)
LED
FZT 705
+5.V
-15V
FZ1705
LMV358M
LM7301M5
MAX4845
TEC
Current
Figure 2-33. Schematic for monitoring and controUing temperature of a detector.
77
equal the updated one. When the output of the op-amp is positive, the Darlington
transistor, FZT603, drives TEC current from +15 V to cool down the detector; when the
output is negative the detector is heated up by a Darlington transistor of opposite polarity.
Two LEDs, +TE Current and -TE Current, are used to indicate the direction of the TEC
current. The actual TEC current is fed back to the controlling computer by the same
process as the temperature monitoring.
The analog and digital currents supplied into an ASIC should be monitored all the
time, because they show the working status of the ASIC. Once these system parameters
go out of an appropriate range, all clocks and biases provided to the ASIC should be shut
off. Figure 2-34 presents the schematic of monitoring and controlling analog and digital
currents. The D-type flip flop acquires a 1-bit signal transmitted from the secondary
computer at the rising edge of the clock. When both the signal and CBOK are true, the
LED, ASIC ON, lights up, and the two relay switches, TK1-5V, are closed allowing
circulation of analog and digital currents. The voltage across the resistor which each
current passes through is measured by a differential amplifier and transferred to the
secondary computer for display.
High voltage bias to transport electrons and holes generated in each detector is
provided by this board as well. Figure 2-35 shows the schematic of the high-voltage
control and monitor circuit. Four 45-volt batteries are located on each control-and-bias
board. The presence of the high voltage on the detector surface is determined and
monitored by the same relay circuit used to control and monitor analog and digital
currents.
78
ji
+5V
Opto-isolators
LED
A/W
Data—AAA/-
—'Wv
PS9701
Tnverti ;rs
74AHCT08
D-type
Flip Flop
Clock —WV
-ASIC
NOR Gatt
CLK
3904
Q
PS9701
74AHCT04
Chip Select
PS9701
AND Gates
74AHCT1G08
74AHCriG02
>ADDIC>
GND
+5V
Relay switch
-5VD
TK1-5V
DV
-5VA
AV
TK1-5V
LM7301M5
MAX4845
Digital
Current
CMOS switch
LM7301M5
MAX484f
Analog
Current
MAX484!
ASIC ON
Figure 2-34. Schematic for monitoring and controlling analog and digital currents
supplied to the ASICs
79
Ji
+5V
HV
Enable
LED
Opto-isolators
—AAA/
PS9701
InxfiTters
D-type
74AHCT08
I™
74AHCT08 ^''P
\
]
Clock
CLK
PS9701
Chip Select —N\/\r
74AHCT04
Q
3904
NOR Gate
74AHCT04
AND Gates
74AHCT1G08 74AHCT1G02
PS9701
GND
+5VHV Bias
Relay
TK1-5V
LM7301M5
CMOS
HVON
MAX4845
>ADDlt>
Figure 2-35. Schematic for monitoring and controlUng high voltage applied to each
detector surface.
80
2.5.2 Labview software operating eight control-and-status boards
Figure 2-36 shows the main panel, programmed by Labview, operating eight controland-status boards. The prototype of this program was designed by Prof. Lars Furenlid in
our research group. Once we press the bottom left button labeled Start, this program
starts reading and monitoring system parameters from all eight boards continuously. Five
windows in the top box display temperatures, TEC currents, analog currents, digital
currents, and high voltages. We can change the bar graphs to numeric values using the
switch labeled GC on the bottom right comer of the box. The power statuses of eight
clock-and-bias boards are monitored at the graphs labeled C&B Boards Up in the bottom
left box. If a clock-and-bias board is powered down, the color of a bar indicating
Figure 2-36. Main panel operating eight control-and-status boards.
81
the board status is changed from green to red. In the bottom right box, switches enabling
temperature control and determining the presence of ASIC power and high voltage are
located.
The temperature on each detector is managed by a proportional-integral-derivative
(PID) control loop. A temperature set point, where a user would like the detector to
operate, is set on the main panel, and it is compared to the current reading. The difference
between the set point and the current reading, called temperature error, is used as an input
parameter to the PID loop,
Output = Pe +1 ^edt + D^e,
(2.12)
where P is proportional gain, I is integral gain, D is derivative gain, and e is the
temperature error. The PID loop must be tuned for proper gains and iteration period in
order for the temperature not to oscillate around the set point or reach the set point too
slowly. We use a tuning method called the reaction-curve method (Ziegler, 1942). The
gains and iteration period currently used in SemiSPECT are listed in table 2-6. Figure 237 presents temperatures on eight detectors versus time while SemiSPECT was cooling
down from room temperature to a 5°C set point when the recirculating chiller was set to
keep the coolant at 5°C. The required time to stabilize each detector temperature at 5°C
p
I
D
AT (sec)
1
0.1
0.05
0.5
Table 2-6. PID-loop parameters used in SemiSPECT.
82
2S.0-
2S.0-r
912
912 3
Tim* (s»c)
2S.0-r
25.0'
too 200 300 400
250-r
25.0-
912
2S.0
i
25.0-r
912
Figure 2-37. Temperatures on eight detectors as the temperatures are lowered
from room temperature to 5°C.
T«Hnp>ar^jr4i v«rt«^lan on dcfcactor 1
500.0
10000.0
Twr^Mroturv v«t1«bon on detector 2
20000.0
300IM.0 36500.(
500.0
10000.0
Time (sac)
20000.0
30000.0 36900.^
TkTM<SK)
Temp«raUir« varMion on dotKbn" 3
Tomparafcura variatten on dstector 4
Q^5.05
S
i S.OO-
i
• 4.955C».0
10000.0
_
20000.0
30000.0 36500.<
SOO.O
10000.0
Tima C«oc)
20000.0
30000.0 36S00.4
Tima (sac)
Twn^atura vartattan 0w dbtmtu^ 8
TarnfMr«feui« iMrtaUon
difcaetor e
^S.05-1
imm
500.0
loobo.o
20000.0
TIma (sac)
30000,0 365b0.c
lOOOO.O
loom.o
20000.0
300ra.0 365U.I
TIma (sac)
Tmnparatura %'ariatton on datactor 7
500.0
500.0
Tamparafcura yariauen en d
2CM00.0
Tima (sac)
30CX)0.0 365Ca.(
500.0
lOOOO.O
20000.0
30000.0 36900.<
Tima(«ac)
Figure 2-38. Temperature variations on eight detectors for 10 hours, when
each temperature is stabilized at 5°C.
83
was approximately 9 minutes. Figure 2-38 shows temperature variations on eight
detectors stabilized at 5°C for 10 hours. Temperature variation on each detector was
within ±0.05°C from the set point.
84
2.6. Clock-and-bias board
Figure 2-39 shows a picture of a clock-and-bias board. The clock-and-bias board,
designed in CGRI and modified by our collaborators at Goddard Space Flight Center,
provides ten clock signals and twelve low-voltage biases to an ASIC and transfers pixel
and reference signals acquired fi-om each camera to a front-end board after amplifying
and adjusting their voltage ranges to the acceptable level for the ADC on the front-end
board. SemiSPECT includes eight clock-and-bias boards.
2.6.1. Clock and bias signal description
The twelve clock signals are generated by a commercial clock-generating board,
'CompuGen 3250', manufactured by GAGE applied Sciences Inc. Two clock signals.
Figure 2-39. Picture of a clock-and-bias board.
85
the pixel clock and frame trigger, are supplied to front-end boards, and the other ten clock
signals are transferred to each clock-and-bias board via the clock-splitter board.
Figure 2-40 shows a simplified schematic of the clock-splitter board. The clocksplitter board buffers each clock signal into eight equivalent signals and provides enough
current to drive opto-isolators mounted in the input channels of the front-end boards and
clock-and-bias boards. The typical minimum current required by a single opto-isolator is
2.5 mA, and the maximum current driven from each output in the clock-splitter board is
20 mA. The clock-splitter board includes six 8-bit driver chips. The twelve clock signals
generated from the Gage card come into this board through the connector Jl. The frame
trigger and pixel clock are transferred to eight front-end boards via connectors J2 to Jl 7,
and the other ten clock signals go to eight clock-and-bias boards via the connectors from
J18 to J25. Figure 2-41 shows the CAD design of the clock-splitter board designed by the
author originally and modified by a former undergraduate student. Lance Fesler, in our
research group. The CAD design was completed by PC-Board-design software
'UltiBoard'.
The clock patterns are programmed by a Labview program, whose main panel is
shown in figure 2-42. Joshua D. Eskin, a former graduate student, developed the
prototype of this software, and Prof Lars R. Furenlid modified it to drive the Gage card.
The timing sequence for a single frame is subdivided into three main groups: Group 0 is a
frame-start sequence, group 1 is a main sequence to read out signals, and group 3 is a
frame-end sequence. The number of repetitions of each group is set in the top right box
labeled Main Groups: Repetitions. Group 0 and group 1 are executed once, and group 2
86
J1
74ACT11244
Prstl_P Pcl_P Poff P Pshl P Pras_P Psas_P Psh2_P Prs2_P Praf_P Psaf_P Frame trigger Pixel clock -
74ACT11244
J18
J22
74ACT11244
J19
J23
74ACT11244
J20
J24
74ACT11244
J21
J25
From Gage Card
-P-
74ACT11244
J2
J3
J4
J5
J6
<s)
J7
Jll)
J12/
J13/
J15^
"JISS
>-
Figure 2-40. Simplified schematic of the clock-splitter board.
J9 X
Figure 2-41. CAD design of the clock-splitter board.
88
-in""
ilock Number]
[group^fwwibyj
|Nft.etacktiete [
j^qpO I
{ Qrogp2
Figure 2-42. Main panel programming clock signals for ASIC.
is repeated 32 times. Each group is composed of several blocks, and each block is
displayed in the central array of square buttons. The pattern of each clock signal in the
block can be edited by the horizontal button array corresponding to the clock signal, and
visualized in the graph labeled preview graph. When the master frequency is set to 50
MHz, one clock tick represents 20 ns and the length of a single block is determined by
the number in No. clock ticks. Each block can be allocated to one of the three upper-level
groups using the numeric controller labeled Group Number, and the Repeat N times
controls the number of block repetitions. The timing diagram for a single frame is
displayed when the button labeled View Timing Diagram is pressed. After the clock
89
signals are properly programmed, we can save the clock patterns as a file compatible with
the GAGE board by pressing the button labeled the Write Timing Gen. File. The file is
loaded to the CompuGen T30 software, written by Gage Applied Sciences, allowing the
GAGE card to produce the clock signals. Figure 2-43 shows the front panel of the
CompuGen T30 software.
TlPtxt
^GageBit - Output
File
Edit
View
Setup
Action
Help
Digital Output:
I Digital
Timing
•^1 I AND
Selection from fo
Mask:
|FFFFFFFF
Pattern
fl
^of
Siinc Scroll
20 nS/DIv
Generate and Lapfure
Previous
For Help, press Fl
I
1
iPos: 0.00 nS
Setup Output
Apply
To [o~
_ aphjre
Manual Trigger
Move Input to Output!
Setup Input
|NLJf«r ISCRL
Figure 2-43. Front panel of the CompuGen T30 software.
90
Table 2-7 lists the clock signals, their functions, and the adjusted voltage levels, and
figure 2-44 shows a timing diagram for slow clock signals (a) and fast clock signals (b).
The period of the slow clock signals, the temporal length of a single frame, is 1245.44 )^s,
and the fast clock signals are repeated 64 times per period. Five clock signals, Psaf, Praf,
Psh2, Psas, and Pms, are utilized for multiplexing the pixel signals. The multiplexing
scheme is illustrated in figure 2-6. Pras and Psas are supplied to row-shift registers.
Row-shift registers are all reset when Pras is asserted, and pixel signals stored in read-out
unit cells of the first row are transferred to column-sample-and-hold buffers. After Pras is
unasserted, Psas toggles 64 times in each frame, and the successive row is selected at
every clock transition. Each column-sample-hold buffer includes two integrating
capacitors. The pixel signal passed from a read-out unit cell of a currently activated row
is saved into one of them while a pixel signal stored in the other capacitor at the previous
Clock signal
Function
Voltage level (V)
Psaf
Fast scanner advance
0, -5
Praf
Fast scanner reset
0, -5
Psas
Slow scaimer advance
0, -5
Pras
Slow scanner reset
0, -5
Prstl
CTIA reset clock
-1,-3
Poff
Pel
Offset clock
0, -5
Clamp clock
0, -5
Pshl
Pixel-sample-and-hold clock
0, -5
Psh2
Column-sample-and-hold clock
0, -5
Prst2
X5 amplifier reset
0, -5
Table 2-7. List of clock signals, functions, and voltage levels.
91
n
J
PRSTl
-VA
PCL
I
-VA
POFF
-/APSHl
VA-
PRAS
V/VA-
PSAS
VAPSH2
0.0 4.48 8.96 11.2
19.8
38.58
57.06
75.54
Time (us)
1202.88 |1240.96]
1238.72 1245.44
(a)
-VA
VA
•tAI
280
560
840
17920 17960 18200
Time (ns)
(b)
Figure 2-44. Timing diagram for slow clock signals (a) and fast clock signals (b).
18480
92
clock is sent out to the signal bus, and their functions are alternated at every clock
transition of Psh2. Psh2 leads Psas by 60 ns. Praf and Psaf are supplied to column-shift
registers. Praf is asserted once every 280 ns, and
toggles 64 times in each fast clock
period, 18.48 |a,s. All column-shift registers are reset by the assertion oiPraf, and then the
pixel signal stored in each column-sample-and-hold buffer is read out sequentially to the
signal bus whenever the signal state of Psaf is changed, resulting in a video-like signal.
Each read-out unit cell requires four clock signals, Prstl, Poff Pel, and Pshl. The
schematic of the read-out circuitry is presented in figure 2-5. Pel and Poff are asserted at
the begirming of each frame to set the voltage on the node C to the clamping bias, Vd, and
the voltage on the node A to the offset voltage, Vof, respectively. When Pshl is asserted,
the sample-and-hold switch is closed to transfer the pixel signal integrated on the
Bias signal
Function
Voltage level (V)
VCASl
CTIA cascade bias
-1.70
VCAS2
X5 amplifier bias
-1.64
VOFF
Offset capacitor voltage
-0.53
VCLl
Pixel clamp bias
-1.00
VCL2
X5 amp clamp bias
-3.60
VGUARD
ISSl
Detector guard ring bias
-0.93
CTIA bias current
-0.30
ISS2
ISS3
Pixel s/h buffer bias current
-2.64
Pixel output buffer bias current
-0.94
-2.74
ISS5
Column s/h output buffer 1 bias current
Column s/h output buffer 2 bias current
ISS6
X5 amp clamp bias
-1.17
ISS4
-0.63
Table 2-8. List of bias signals, functions, and voltage levels.
93
capacitor, Qnt, to the capacitor, Csh- The integrated charge on C,„( is reset by assertion of
Prstl at the end of each frame. Each ASIC includes circuitry to amplify the pixel signal
by a factor five. Prst2 is asserted at the end of each fast clock period to reset the amplifier.
Currently the times-five amplified signals are chosen to be acquired by a front-end board.
The twelve bias signals are generated in each clock-and-control board and provided
to an ASIC. They are used to program offset voltages, currents charging up capacitors,
and biases for amplifiers in the ASIC. Table 2-8 lists the bias signals, their functions, and
voltage levels.
2.6.2. Hardware in clock-and-bias board.
Figure 2-45 shows the schematic of two different types of circuitry to shift the output
voltage level of the digital clock generator down to the voltage level of each clock signal:
fixed voltage-level shift (a) and variable voltage-level shift (b). When the state of the
incident clock is high in (a), the following CMOS switch is closed, giving out 0 V, and if
not, the switch is released, giving out -5 V. Four clock signals used in the multiplexer,
Psaf, Praf, Psas, and Pras, are adjusted in this way. The other six clock signals utilize the
circuitry of (b). The upper and lower limit of each clock signal can be manually adjusted
by the two analog potentiometers. When the state of the incident clock is high, the upper
CMOS switch is closed while the other switch is opened giving out the voltage set by the
upper potentiometer. Similarly, when the state of the incident clock is low, the lower
CMOS switch is closed and the other switch is opened giving out the voltage set by the
lower potentiometer.
94
-5V
Opto-isolator
Clock
Buffer
CMOS switch
Inverter
74HC14
AAV
GND
6N137
EL2001C
HI201
(a)
+15V
AD586
Voltage
reference
-5V
Potentiometer
CMOS switch
-15V
Opto-isolator
Clock
HI201
Inverter
[>o
74HC14
GND
EL2001C
6N137
+15V
Buffer
74HCT7fi
Latch
CMOS switch
AD586
HI201
Voltage
reference
Potentiometer
-15V
(b)
Figure 2-45. Schematic of the circuitry for fixed
variable voltage-level clocks (b).
voltage-level clocks (a) and
95
AD586
Voltage +5V
reference
Potentiometer
CLC402
+15V
Potentiometer
AD586
Voltage
reference
-5V
EIS>
CLC402
-15V
Buffer
Reference
signal
Pixel signal
CLC115
NIE81
-15V
Figure 2-46. Schematic of the circuitry for pixel signal and reference signal transfer.
96
+15V
AD586
Voltage
reference
-5Vi
COP470
-AA/\r
Potentiometer
COP470
E>
•AAA/—^ Bias >•
-15V
Figure 2-47. Schematic of the circuitry generating a bias signal.
The circuitry for transferring the pixel and reference signals to the front-end boards
is presented in figure 2-46. The pixel signal and reference signal generated from an ASIC
come into this board through the coimectors J3 and J4, respectively. The two signals are
terminated by the dual BJT stage, NIE81, and then transferred to a front-end board
through the two op-amp based feedback amplifiers in differential mode. Two voltage
references provide an upper Umit, +5 V, and a lower limit, -5V, of the offset voltage for
each signal. The offset voltage is adjusted manually by the potentiometer.
Figure 2-47 shows the circuitry generating each bias signal. The voltage reference,
ADS86, gives out a precise -5 V that is transferred to the potentiometer through the opamp buffer. Then the bias signal, adjusted by the analog potentiometer manually, is
transferred to an ASIC.
97
2.7. Main LabVIEW software
The primary purpose of this software, programmed in LabVIEW, is to acquire
projection views of an object. As we discussed in section 2.3, before triggering the listmode data acquisition, a front-end board must have a baseline table, a threshold table,
and a gain table. Therefore, the first step in use of this software is to obtain pixel signals
of multiple frames in order to extract the baseline and threshold tables. Figure 2-48 shows
the sub-panel that triggers multi-frame transfer, generates baseline tables, and transfers
the baseline tables back to front-end boards. The number of frames to be collected is
determined by the numeric controller labeled N of frames. When the circular button
sMw
ESI isonksL. I'.E
grwn ^ Ea
£3 EH
bib™
*1*
Einns Hwni SI SI
3a
nn™ sa si:
inrn
sEsai ia a seiEinni am a a EaHnrrs
V
Figure 2-48. Sub-panel for triggering multi-frame fransfer, generating baseline tables,
and transferring the baseline tables back to front-end boards.
98
labeled BTG is pressed, all eight front-end boards start sending multiple frames to their
back-end boards, and then those frames are captured and averaged to give eight baseline
tables. The baseline tables are displayed in the graphs of the panel as well as transferred
back to the front-end
boards. If a baseline table is generated incorrectly due to
transmission error, the indicator labeled NO BT UG is lighted, and the baseline table is
not transferred back to a front-end board.
Figure 2-49 shows the sub-panel that generates threshold tables and transfers them to
front-end boards. As discussed in section 2.3.2, each threshold value is set to a multiple
of standard deviations of the sums of nine baseline values of a 3 x 3 window, and the
multiple is determined in the numeric controller labeled SD. The button labeled THG
triggers threshold table generation, display, and transfer.
BBa a a
sEai a a
ssaa a
aHEirTC aai sa a
V
lEinns
SB EEi
asiai ™ Ea
sai ™-a iz^eEinrc
Figure 2-49. Sub-panel for generating threshold tables and transferring them to front-end
boards.
99
Gain Map 1
<3ain
5
1918
Gain Map 2
4181
IF"
Gain Map 6
2871 |' j|V I. ' •
Gain Map 3
Gam Mi» 7
Gain Map 4
Gain Map 8
4146
Figure 2-50. Sub-panel for generating gain tables and transferring them to front-end
boards.
Figure 2-50 shows the sub-panel for generating gain tables and transferring them to
front-end boards. Each one-dimensional array labeled Gain Map holds a gain table, and
an initial gain table is composed of all zeros. In order to disable a noisy pixel, the number
at the address of the noisy pixel should be changed from zero to one manually. The
control button labeled GAIN is used to transfer gain tables to front-end boards.
The main panel for acquiring projection views is shown in figure 2-51, displaying
projections of mouse skull and thorax in eight different views. The switch labeled LM
START enables list-mode data acquisition on all eight front-end boards. List-mode data
arrays transferred from front-end boards are saved into signal buffers in this software and
displayed on the graphs labeled Data Map. When the acquisition of eight projection
views is completed, the data arrays in the signal buffers are saved into eight independent
100
iursor 1 |l 163
Icursor 1 b4 ^29
Einns SEBB a • •lEsnn amiaa
Eirrns BI™ a si laMEir^rs laww n •
aiBn • a iHaC^rrc
Figure 2-51. Main panel for acquiring projection views.
files, and the graphs and signal buffers are cleared to prepare for subsequent projection
data. If another eight projection views are needed at a different angle, the object is rotated
to the new angular position and the list-mode data acquisition is resumed, otherwise the
program stops.
Data in memory buffers of back-end boards should be downloaded before they
overflow. The numeric controller labeled LM Initial Time (sec) determines the frequency
of data downloading. For example, if the number in LM Initial Time (sec) is 1, data will
be accumulated for 1 second in memory buffers and then downloaded. The data
acquisition time must be elongated to account for the radioactivity decay of the object.
The newly updated data acquisition time is monitored in the numeric indicator labeled
101
LM Time (sec). The Event numeric indicator located below each graph presents the data
length in each download, and the indicator labeled N of check out indicates the amount of
data that fails checksum comparison. The total number of projection views is determined
in the numeric controller labeled # of projections, and each angular step of object rotation
is calculated based on the number. The # of updates per projection determines how many
times data will be downloaded per each angular position from memory buffers, and the
accumulated acquisition time is displayed in the Acquisition Time (sec) indicator. The
direction of object rotation is controlled by the switch labeled CW/CCW. When the
switch is set to the left, the object rotates in a clockwise direction, otherwise it turns
counterclockwise. The button labeled RESET DA resets signal buffers, and the button
labeled RESET Z)M clears the graphs.
Baseline values are highly sensitive to temperature variation on the detectors. Also
the characteristics of the electronics placed in the analog data channel may vary with
temperature, causing a change of baseline values. Figure 2-52 displays baseline-table,
temperature, and high-voltage variation of eight detectors for 7500 seconds. Each value
in the graph monitoring baseline-table variation is obtained by averaging 128 baseline
tables, and the vertical axis of the graph is scaled by the output unit of the ADC in the
front-end boards. 1 ADC unit corresponds to about 1 mV. Since baseline-value
fluctuation can degrade energy resolution and create pseudo events, it is important to
track the baseline values while acquiring data.
A baseline table cannot be generated by simply averaging pixel signals on the fly,
because some pixel signals may contain photon energies. So another threshold table, set
102
Tei*w«toie wiibno wdiiteetw I
MS.0
£42,8
«».0
Tkm(Mc)
12800.0
19000.0
170n.(
HV v«Mlon on dMtor 1
178.0
178.8'
17S.6
178.4'
178.2178.0
1SOOO.O
1T0W.<
tnBo.e
i7ooe.(
T«npwitwft wMion «ndrtweo 2
§5.02
I 9.00
327.9
tSOOO.0
tTOdO.
4.96
4.9S
Jr""
176^
^175.8
.o
9«ob
igSOM
tsb00.0
TkM(MC)
17000.1
176.S
6S0.0
178.2
M2.S
9600.9
12900.0
ISOOO.O
"nnttee}
Tin* (sac)
1SQQ0.0
17Q0Q.fl
175.5-!
TIWCMO
17000.1
177.0
176.4
176.2
49S.0
17000.(
IZSOO.0
12BDD.0
15000.0
tfemtcac)
I76.S
176.4
178.2
176.0
I 372.8
362.S
360.0
9800.0
472.8
470.0
467.S
468.0
« 462.5
461.0
12800.0
ISOOO.O
Tkn*(flK)
17000i
inoo.0
T»rM(SK)
iasoo.0
1SOOO.O
Tim«(se^
17000.1
17D0D.<
176.6
176.6
5.00-
12800.0
18000.0
TtMCsaa
12800.0
15000.0
Tkn* (see)
17000.«
12900.0
170004
176.0
517.5
512.8
9800.0
17000.1
TinM(Me}
15000.0
12500.0
timCMC)
17000.1
178.2
270.0
i2S00.0
Tki»(«c)
12800.0
15000.0
Ttnstsac)
17000
174.6
174.5
9800.0
17000.1
Figure 2-52. Baseline table variation of eight detectors according to temperature and
high voltage variation.
103
to a multiple of standard deviations of pixel signals acquired with no radioactive source,
is used to identify pixel signals that include photon energies, and the baseline table is
updated excluding them. The multiple to set the threshold values is determined in the
numeric controller labeled SD base upg in figure 2-48. This scheme is effective only
when baseline values change slowly and the photon-counting rate per frame is low. The
frequency of baseline-table update is determined by the numeric controller labeled
Baseline update in figure 2-51.
Figure 2-53 shows two sub-panels for confrolling the rotary stage (a) and the linear
actuator (b) of the animal stage shown in figure 2-19. The prototype of this sub-program
was designed by William C. J. Hunter, a current graduate student in our research group.
This program sends commands to a motor controller that executes the commands. The
control button labeled Set Online enables communication between the host computer and
the motor controller, and the Quit Online disables it. The Set Home command is used to
memorize the current position of an object, and the object is moved to this position
whenever the Home button is pressed. In the rotary stage control, the numeric controller
labeled Deg to rotate is set to the degrees of rotation, and the direction of the rotation is
determined by the two buttons CW and CCW, standing for 'clockwise' and
'counterclockwise' respectively. In the linear actuator control, the travel distance of an
object is controlled by the numeric control labeled (mm) to move, and the direction is
determined by the two buttons. Up and Down. To complete the fransfer of commands, the
circular control button labeled Send command should be pressed.
104
toroiafe
;wro)tofnov8^i).o()o
(a)
(b)
Figure 2-53. Sub-panels for controlling the rotary stage (a) and linear actuator (b).
105
CHAPTER 3
PERFORMANCE CHARACTERIZATION OF
SEMISPECT
The performance of a SPECT system is judged by several characteristics, including
spatial resolution, sensitivity, and energy resolution. Spatial resolution represents how
well the system can reproduce small structures of an object, and sensitivity is a measure
of how effective the system is in gathering the available photons. High energy resolution
is crucial to remove events where the photons have undergone Compton scattering and
enable multiple-isotope imaging. This chapter presents the three characteristics of
SemiSPECT and detectabiUty for multiple signal spheres simulating lesions in a small
animal. All experiments were accomplished based on the small aperture specified in table
2-2 of section 2.2.2.
3.1. System-matrix measurement
The system matrix of a SPECT imager provides information of system sensitivity
and spatial resolution, and it is also used in tomographic reconstruction. The system
matrix can be simulated fi"om the geometry of the system or measured by moving a point
source to all locations of a 3D grid in object space. We measured the system matrix of
SemiSPECT in order to incorporate the nonuniform responses of the CdZnTe detectors
and imperfections of the system. Chromatographic 300-jxm diameter beads were soaked
in aqueous solution of ^^'"Tc and dried. Then we massed them at the tip of a capillary
tube using epoxy to make about a 10 mCi point source with about 1 mm diameter. Three
106
translation stages were employed to move the source to each grid point and hold it for the
image acquisition. Figure 3-1 shows a measurement of a point source on a grid point. The
system matrix contains 23680 grid points with 1 mm stepping increment in each
direction. The acquisition time for the first step was 100 ms, and it was prolonged
according to the decay of the object radioactivity. The total acquisition time for the
system matrix measurement was approximately 13 hours. The stepping increment could
be shortened to reduce the voxel size of reconstructed images, but the acquisition time
per step would have to be reduced too in order to maintain the total acquisition time
within an appropriate temporal range. Instead we interpolated the system matrix. We
assumed that each point-source measurement has a Gaussian spatial distribution, and
extracted its position, maximum signal, and standard deviation. Then we averaged those
three parameters for two successive measurements, creating a point-source response
between them. The total grid points could be increased about eight times. In order to
reconstruct an image with additional projection views, the system matrix must be
interpolated to those angular views as well.
Oit»Map2
CkataMit4
Figure 3-1. Measurement of a point source in a system-matrix grid point.
107
3.2. Spatial resolution
3.2.1 Planar resolution
The geometric planar resolution of a pinhole collimator is defined by
5, +5.
s.
^d.
(3.1)
where 5, is the source-to-pinhole distance, ^2 is the detector-to-pinhole distance, and d is
the diameter of the pinhole aperture (Barrett and Swindell, 1981). Figure 3-2 illustrates
the geometry of pinhole imaging. When a point source is located at the center of the field
of view with the small aperture, Sx is 32.36 mm, and
is 25.68 mm. As presented in table
2-2, since the actual pinhole diameter is 0.5 mm, and the effective pinhole diameter is
0.77 mm, the planar resolutions with the actual pinhole and effective pinhole become
1.13 mm and 1.74 mm respectively. However, the total planar resolution dt should take
the intrinsic resolution <5int of the detector into account. The intrinsic resolution of a
pixellated detector is a single pixel-detector size. The total planar resolution can be
determined by the full-width-at-half-maximum of the convolution between a cylinder
function with diameter of the dph and a two-dimensional rectangle function with width of
e in both axes, when s is equal to (5j
. So the total planar resolution can be
written as
d,^ = FWHM cyl
* *rect
where FWHM\J{x,y)'\ is the ftill-width-at-half-maximum of a functiony(jc,>^) and * *
108
Source
T
I\
I \
I \\
/
f
\
/
/
\
\
\
\
/
/
Pinhole
d
EEEEHHHHH'
Detector /
/
Jc-
h-
\
\
L
T
Figure 3-2. Geometry of pinhole imaging
Small pinhole
Large pinhole
Actual pinhole diameter (d)
0.50 mm
1.00 mm
Effective pinhole diameter (de)
0.77 mm
1.26 mm
Distance from source to pinhole (Si)
32.36 mm
32.36 mm
Distance from pinhole to detector (S2)
25.68 mm
25.68 mm
Planar resolution (Sph) based on de
1.74 mm
2.84 mm
Intrinsic resolution (<$int)
0.38 mm
0.38 mm
Total planar resolution
by equation
(3.2) based on de
Total planar resolution (^^c) by equation
(3.3) based on de
1.72 mm
2.82 mm
1.80 mm
2.88 mm
2.83 X 10-^
7.59 X 10"^
— - —
Efficiency of eight pinholes based on de
Table 3-1. Planar resolution, total planar resolution, and geometrical parameters based
on 0.5-mm and l-mm diameter pinholes, when the source is located at the center of the
field of view.
109
denotes the two-dimensional convolution operation. Also if we assume that dph and dint
correspond to the standard deviations of Gaussian functions, the total planar resolution is
given by
(3.3)
Table 3-1 shows the planar resolution, total planar resolution, and geometrical parameters
based on 0.5-mm and l-mm diameter pinholes, when the point source is located at the
center of the field of view.
3.2.2 Spatial resolution based on the Fourier crosstalk approach
The Fourier crosstalk matrix was first developed to design cone-beam tomography
systems (Barrett and Gifford, 1994), and its figures of merit for evaluating system
performance were explored by Barrett et al. (Barrett et al., 1995). This section reviews
the Fourier crosstalk concept to extract spatial resolution of an imaging system, and the
result for SemiSPECT is discussed.
When a continuous-to-discrete operator H acts on a three-dimensional object f the
output of the system can be written as
g=Hf+n,
(3.4)
where the vector n models noise in measurement. The ntth detector measurement is given
by
gm
=
lK(r)fir)dr + n^,
(3.5)
110
where the S represents a support function S ( r ) , whose value is 1 for points r e S and 0
otherwise. Since the support function defines a finite object space, the object / can be
represented by a Fourier series
/(r)=
(3.6)
k=-oo
where
0^(r) = e"''^'S(r)
is the
ky, kz),
Fourier basis function. The vector index
and the wavevector
k
(3.7)
spans an infinite set of integers
{kx,
takes the values
P,=j^k,
(3.8)
where L is a width of the smallest cubic region enclosing the object space. Combining
equation (3.5) and (3.6) yields
00
(3.9)
/t=-oo
where
f.i =
(3.10)
hi equation (3.10), h^{r) is called the detector sensitivity function since it describes the
measurement sensitivity of the rrith detector element to a point source at F. An element of
the Fourier cross-talk matrix is defined by
P
s
M
.
i
'
•
P-11)
Ill
The diagonal elements of the Fourier cross-talk matrix,
M ,
^
=y
J2 =y
^kk
Au\
m=\
mk\
Z-i
(3.12)
m=\
can be regarded as a kind of MTF^ of the system. However, since the diagonal cross-talk
elements
is observed to fall off as 1//?^ (see figure 3-3), we define the equivalent
MTF^ as
MTFi
(3.13)
and the equivalent MTF as
(3-14)
Assuming the MTFgq follows Gaussian distribution, we can define the volume
spatial resolution of the system as the full-width-at-half-maximum of the Fourier
transform of MTF^^ along the three axes. A Gaussian-distributed MTF^^ along the j axis
can be written as
MTF^^U) = A, e x p ( - f / 2 a ' ) ,
(3.15)
and the Fourier transform of it is
F { M T F ^ ^ { j ) } = Aj2;rc7' exp(-2;rV'^') .
(3.16)
The full-width-at-half-maximum of M T F ( j ) in equation (3.15) is crV81n2 , and that of
F { M T F ^ ^ U ) } is V21n2/
j axis is given by
I a . Therefore the spatial resolution of the system along the
112
Spatial resolution =FWHM{F{MTF(j)}) = ^^
,
7t F W H M { M T F ^ g ( j ) )
(3.17)
where FWHM[t(x)] gives the full-width-at-half-maximum of a function t(x).
If the measured system matrix is assumed to be a discrete form of the detector
sensitivity function h^(r) , the conjugate of the three-dimensional discrete Fourier
Transform (DFT) of the system matrix is approximately
. Once
is computed,
the MTF^^ is obtained fi"om equation (3.12) and equation (3.14), and the spatial
resolution is calculated based on equation (3.17). However, if h^ir) is not bandlimited
or the sampling of
(r) does not satisfy the Nyquist condition, aliasing will occur in
Figure 3-3 and figure 3-4 show the normalized
and MTF^^ of SemiSPECT
respectively along the three axes, when the system matrix is obtained in 64 angular
views, and the Z axis is perpendicular to the circular slices of the cylindrical object space.
On each graph in figure 3-4, the dots represent the values of MTF^^, and the line
represents a Gaussian function closest to the MTF^. We can notice that the center value
of each MTF^^ becomes zero by the ramp filtering |y9-|. Table 3-2 lists the spatial
resolutions along the three axes estimated by the Fourier crosstalk approach.
On the other hand, the off-diagonal elements of the Fourier cross-talk matrix reflect
the degree of aliasing between two different frequencies k and k ' . The Fourier cross­
talk matrix can be represented as the inner product of the data vectors produced by
113
1.0
0.7
0.5-
03-
mm'.1
(a)
1.0
0.90.8
0.7
0.6
0.50.4
030.20.1
0.0
mm'
-1
(b)
0.7
0.2-
0.0
mm'.1
(C)
Figure 3-3. Normalized
of SemiSPECT along X (a), Y (b), and Z (c) axes, when
the Z axis is perpendicular to the circular slices of the cylindrical object space.
114
0.90.80.70.60.50.40.3-
)oo^
Oo
02-
0.10.0-
mm'
(a)
1.00.90.80.70.60.5
0.4oo
0.3-
0.20.1
0.0-
mm'•1
(b)
1.00.9-
0.70.60.50.40.3-
0.1-
0.0
mm'-1
(C)
Figure 3-4. Normalized MTFeq of SemiSPECT along X (a), Y (b), and Z (c) axes,
when the Z axis is perpendicular to the circular slices of the cylindrical object space.
On each graph, the dots represent the values of the MTFeq, and the line represents a
Gaussian function closest to the MTFeq.
115
Spatial resolution
X axis
1.45 mm
Y axis
1.45 mm
Z axis
1.45 mm
Table 3-2. Spatial resolution by Fourier crosstalk approach along three axes,
applying the operator H to the two basis functions
(r) and
(F); i.e.,
M
(3.18)
m-\
where (M , V ) indicates the complex inner product of the two vectors u and v . The angle
between the data vectors is defined by
COS^rr,
kk
(3.19)
=
PikPiv
For k^k' , if cos^^p = 0 , the data vectors of the 0^(F) and Op(F) are easily
distinguished, and if not, the discrimination of the data vectors becomes more difficult, hi
the extreme case where cos6^^, =1, the data vectors of the ^^(F) and ^p(F) have
exactly the same pattern, and it is impossible for them to be resolved. Figure 3-5 presents
the cosOj^^,, when ky = -\6, kz = 0, and kx varies from -16 to 15 for both k and k', with
system matrixes in 16 (a), 32 (b), and 64 (c) angular views respectively. We can notice
that the values of cos6'^^, are reduced by increasing the number of angular views.
116
-O.UM
-0^
14 16
k
-0.100
>0.000
14 16
-0.100
^JBSO
-04100
14 16 kx
Figure 3-5. Plots of cosOj^^,, when ky = -\6,kz = 0, and kx varies from -16 to 15 for both k
and k', with system matrices in 16 (a), 32 (b), and 64 (c) angular views respectively.
117
3.3. Energy resolution
The easiest way to estimate the energy of a gamma ray interacting in the detector is
to check the signal from a single pixel. But the energy can be spread to the neighboring
pixels due to charge diffusion and emission of K X rays, so we need to include the spread
of the charges for better energy estimation (Marks et al., 1996). Since the energy spread
is usually confined to a 3 x 3 pixel region (Kastis, 2002), the nine signals of the 3 x 3 listmode data array are scanned and any signal above a threshold of each pixel is added to
the sum. In order to render better statistics, the sum of ^®"Tc energy spectra of 121 pixels
was acquired by summing neighboring pixel signals; the result is shown in figure 3-6.
Figure 3-7 shows averaged energy spectrum of 1, 16, and 121 pixels. Since gains from
the pixels can be different to one another, a gain map was calculated from a flood image
and used to adjust each spectrum prior to summing them up. Thresholds were set to twice
the standard deviation of the baseline values. The energy spectrum in figure 3-6 presents
about 10% energy resolution in fiill-width-at-half-maximum. The bump near 70 keV was
caused by K X rays created from the gold insert in the cylinder aperture, or lead and
bismuth contained in Cerrobend in the cylinder aperture, when gamma rays interacted in
rays
Materials^^^
K„i
K«2
Kpi
Kpz
Gold
68.81 keV(100%) 66.99 keV (55 %) 77.9 keV (35 %)
80.1 keV (9 %)
Lead
74.97 keV (100 %) 72.80 keV (55 %) 84.8 keV (35 %) 87.3 keV (10 %)
Bismuth
77.11 keV(100%) 74.81 keV (55 %) 87.2 keV (36 %) 89.8 keV (10 %)
Table 3-3. Energies of K X rays emitted from gold, lead, and bismuth (Bearden and
Burr, 1965; Wapstra et al., 1959).
118
3500
3000
I 2500
Im
S 2000
u
0
®
M 1500
a>
£i
1 1000
z
500
50
100
Energy [KeV]
150
200
Figure 3-6. Sum of
energy spectra from 121 pixels acquired by summing
neighboring pixel signals.
1
0.9
0.8
0.7
Number of Pixel
Spectra Averaged
121
16
1
g 0-6
0.5
0.4
0.3
0.2
O 'f) o o
o ,^ o o
-1^ .«• ,,
I 00 •
^^•
[;
%
0.1
0
100
150
Energy [KeV]
Figure 3-7. Averaged ^^"Tc energy spectra of 1, 16, and 121 pixels acquired by
summing neighboring pixel signals.
119
them. Table 3-3 lists the energies of K X rays emitted from those elements (Bearden and
Burr, 1965; Wapstra et al., 1959). The Kai or Ka2 lines are X rays generated by the
energy transition of an electron from L to K shell, the Kpi line is from M to K shell
transition, and the Kp2 line is that from the
to ^ shell transition. The energy difference
between Kaj and Ka2 is caused by fine structure, and the energy of the K^j or Kp2 is the
weighted average of the X-ray energies produced by the transition from M to K shell or
from N to K shell respectively. The occurrence rate of each K X ray normalized to 100 %
for the Kai is specified in parentheses.
This energy estimation technique was based on a program written by William C. J.
Hunter, a current graduate student in our research group, and he will introduce several
methods that might improve the energy resolution further in his dissertation. Also Daniel
G. Marks, a former graduate student in our group, explained how to improve the energy
resolution based on maximum-likelihood estimation in his dissertation (Marks, 2000).
120
3.4. Sensitivity
Sensitivity can be calculated based on system geometry. The number of photons, Nd,
that reach a detector from a point source through a pinhole aperture is given by,
N,=-^N,.
lor
where
(3.20)
is the number of photons emitted from the point source, de is the effective
pinhole diameter in equation (2.9), and r is the distance from the source to the pinhole.
The sensitivity of SemiSPECT can be estimated by
N ^
Sensitivity = —-^
^0
,
(3-21)
1=1
where At represents absorption efficiency of the i'^ detector. Assuming all photons are
incident perpendicular to each detector surface, the absorption efficiency can be
calculated by
L
A=
=
(3.22)
r=0
Effective pinhole diameter (de)
0.77 mm
Distance from source to pinhole (r)
32.36 mm
Absorption efficiency (At) based on
total attenuation coefficient
0.50
Sensitivity based on At
1.41 X 10"^
Table 3-4. System parameters and estimated sensitivity based on system geometry
under the assumption that the source is located at the center of field of view and
photons are incident perpendicular to each detector surface.
121
where L is the detector thickness and ju is attenuation coefficient of the detector. Since
the total attenuation coefficient i^t for 140-keV photons in Cdo.9Zno.1Te is 3.46 cm"', and L
is 0.2 cm, the absorption efficiency of each detector is 0.50. So the system sensitivity is
calculated to be about 1.41 x 10"^. Table 3-4 lists the system parameters and estimated
sensitivity from the system geometry.
The system sensitivity can be measured directly based on
...
Sensitivity =
Photoncount
^ .
[Acquisition time (sec) x Source activity (Bq) x (1 - Internal conversion rate)]
(3.23)
The internal conversion, an alternative process to gamma-ray emission, is that an excited
nucleus transfers its excitation energy to an orbital electron that is thereby ejected from
the atom. The internal conversion rate for ^^"Tc is 0.1. An approximately 1-mm diameter
point source was made by the procedure described in section (3.1), and then placed at the
center of the field of view of the system. Photon counts were collected for 300 seconds,
and the radioactivity of the point source was about 0.84 mCi at the beginning of the data
collection. The source decay was considered in the calculation. The averaged energy
threshold was approximately 30 keV, and the measured sensitivity was about 1.53 x lO'"^.
Table 3-5 lists the source size, source activity, total acquisition time, and measured
sensitivity.
However the system sensitivity does not include information about how uniformly
the system responds to photons. One technique for assessing the uniformity of the system
is to generate the sensitivity map acquired from the measured system matrix directly
(Rowe, 1991). This map is formulated by
Figure 3-8. Sensitivity map of SemiSPECT.
123
Source size (Diameter)
1 mm
Source activity
0.84 ±0.01 mCi
Photon counts
1284828
Total acquisition time
300 sec
Sensitivity
1.53 ±0.01 X 10"^
Table 3-5. Sensitivity measured using a point source in a preset time.
M
•s.
<3.24)
m=l
where H„m indicates an element of the system matrix and M is the total number of
detector elements. Figure 3-8 shows the sensitivity map. The straight dark lines on the
slices are caused by detector regions having less sensitivity. The effect on reconstructed
images by disabled pixel areas will be discussed in section 4.3.
124
3.5. Detectability
3.5.1 Signal detection theory
Signal detection was defined as "a fonn of binary hypothesis testing where the null
hypothesis Ho is that the signal is absent and the alternative hypothesis Hi is that it is
present," by Barrett et al., 1998. In a binary problem, a scalar test statistic 6 is used to
allocate an acquired data to one of the decision regions by comparing it to a decision
threshold 9th. If 0 is larger than the chosen 9th, an observer decides Hj is true, and if not, it
decides Ho is true. One way to judge how well an observer can distinguish between Hi
and Ho is to compute a signal-to-noise ratio,
(3.25)
where 6j is the conditional expectation of 9 when Hj is true and varj{9) is the
corresponding conditional variance (Barrett et al., 1998). Another way is to calculate the
area under the receiver operator characteristic curve (AUC) (Metz, 1978). If 9 follows a
normal distribution for both hypotheses, the ^[/C is related with the SNRe by
AUC ^ 0.5[1 + erf(0.5SNR,)],
(3.26)
where erf{ ) is the error function (Barrett et al., 1998). Detectability is given by.
d' ^2erf-\2AUC-\),
(3.27)
where erf '(•) is the inverse of the error function (Barrett et al., 1998). From equation
(3.26) and (3.27), we see that the detectability d' is same as SNRe when 9 is normally
distributed.
125
The test statistic is obtained through a discriminant function, T(^ = 6, where g is an
M X 1 data vector. When the observer is linear, the discriminant function is written as a
linear function,
M
(3.28)
m=l
where w is an M x 1 vector of weights and the superscript t indicates transpose (Barrett et
al, 1998). A linear observer achieving optimal SNRe in equation (3.25) is referred to as
the Hotelling observer. If signal-present and signal-absent images are equally likely to
occur, the Hotelling template w is given by
w = [0.5Ki + 0.5Ko]"kgi - go),
(3.29)
where gi and^o are the averaged signal-present and signal-absent data vectors and Ky is
an M X M covariance matrix of g under hypothesis j (Smith and Barrett, 1986; Fiete et
al., 1987). hi photon-limited imaging such as SPECT imaging, the noise on each signal of
the vector g is Poisson, dependent upon the signal. But, if the signal contrast against
background is very low, the signal dependency of the noise can be ignored, so Ki ~ Ko =
K. If the noise is assumed to be independent of the signal, a signal-known-exactly (SKE)
detection on a nonrandom background is considered, and the w in equation (3.29)
becomes
w = K"'(g,-go).
(3.30)
When the observer is the Hotelling observer, both signal and background are
nonrandom in Poisson noise, the signal contrast is so weak that the noise is considered to
126
be independent on the signal, and the test statistic follows normal distribution, the
detectability of a SPECT system is given by
(3.31)
where p indicates the mean projection data including signal and background, b
indicates the mean background, s indicates the mean signal, m is detector element index,
and j is the angular index (Sain, 2001; Barrett and Myers, 2004). In the next section, the
detectability variation of SemiSPECT according to signal-sphere size will be presented,
when the source activity remains constant. Also, the detectability variation by the change
of signal-sphere activity will be examined, when the source size remains constant.
3.5.2 Hardware setup and detectability measurement
Signal and background were measured separately to determine the detectability. To
generate a uniform nonrandom background, a ^^"Tc aqueous solution with about 15 mCi
was injected into a water cylinder having 16-mm radius and 35-mm height. The water
was stirred to ensure a uniform distribution of the radiotracer, and the cylinder was
placed at the center of the field of view. Background data were collected 100 times for a
preset time and then averaged. The initial preset time was 60 seconds, but it was
prolonged according to the decay of the object radioactivity. To make a signal sphere,
"Play-Doh" was mixed with ^^™Tc aqueous solution, and a small portion of the lump was
taken out and rounded. The signal ball was fixed on the top of a wooden stick using
epoxy. Four signal sources of different size were built, as shown in figure 3-9. The
Figure 3-9. Signal spheres used for detectability measurement with 8.4-mm, 6.2mm, 4.7-mm, and 3.1-mm diameters respectively.
Diameter
Activity
Acquisition time
Activity (Bq) x
Acquisition Time
1®* signal sphere
3.5 mm
0.74 mCi
150 ms
4107000
2"** signal sphere
4.7 mm
2.27 mCi
49 ms
4115510
signal sphere
6.0 mm
4.83 mCi
23 ms
4110330
4*'' signal sphere
7.3 mm
ll.lOmCi
10 ms
4107000
Table 3-6. Sizes, activities, and initial acquisition times for the four signal spheres.
128
(c)
(d)
Figure 3-10. Tomographic images of the signal spheres with 3.1-mm (a), 4.7-mm
(b), 6.2-mm (c), and 8.4-mm (d) diameters, when the activities of the signal spheres
are the same.
(a)
(b)
(c)
(d)
Figure 3-11. Tomographic images of the signal spheres with 3.1-mm (a), 4.7-nim
(b), 6.2-mm (c), and 8.4-mm (d) diameters superimposed on the median-filtered
tomographic image of the background with a 9 x 9 window.
129
Figure 3-12. Tomographic images of the smallest signal sphere in the whole (a),
half (b), and quarter (c) acquisition time.
(b)
Figure 3-13. Tomographic images of the smallest signal sphere superimposed
on the median-filtered tomographic image of the background with a 9 x 9
window in the whole (a), half (b), and quarter (c) acquisition time.
130
6.5-
Diameter of source (mm)
whole acquisition time
HjlF acquisition time
Quarter acquisition time
(a)
aj 3.0-
Normalized acquisition time
Ist signal sphere
2nd signal sphere
3rd signal sphere
tth signal sphere
(b)
Figure 3-14. Detectability versus object diameter (a) and normalized acquisition
time (b).
131
acquisition time for each signal sphere was adjusted to equalize the photon counts for all
objects, and the signal data were collected 100 times and then averaged. The acquisition
time was prolonged according to the radioactivity decay of each object. Table 3-6 lists
signal sizes, signal activities, and initial acquisition time. Figure 3-10 shows the
tomographic images of the four signal spheres, when the activities of the signal spheres
are the same, and figure
3-11 shows them superimposed with the median-filtered
tomographic image of the background with a 9 x 9 window. In order to observe the
change of detectability by the variation of source activity, the signal data were recollected
with half and quarter the initial acquisition time. Figure 3-12 shows the tomographic
images of the smallest signal sphere at the three different acquisition times, and figure 313 shows them overlapped with the median-filtered tomographic image of the
background with a 9 x 9 window. All images fi-om figure 3-10 to figure 3-13 were
reconstructed with 64 projection views.
In equation (3.31), if we assume that the angular index j is one, the background b is
constant over all detector elements, and the signal s is constant within a circular region
with diameter d and zero in the other region, the detectability d' can be approximated by
(3.32)
So detectability is linearly proportional to the signal. In equation (3.32), if the diameter d
is changed to ad, where a is a constant value, the signal s should be 5"/or ^ in order to
maintain the total sum of signals constant, so the d' becomes
132
Us lay.(adf
V
46
g gg
aV 4ft
3 33)
So detectability is inversely proportional to the object diameter when the object activity is
maintained constant. The detectabilities versus object diameter (a) and activity (b) are
presented in figure 3-14, when 64 projection views were obtained. We can notice that the
detectability is inversely proportional to the object diameter (a) and linearly proportional
to the object activity (b), which is consistent with equation (3.33) and (3.32).
133
CHAPTER 4
IMAGING WITH SEMISPECT
There are two conventional methods to estimate the radionuclide distribution in the
object from projection views; filtered back-projection (Radon, 1917) and maximum
likelihood-expectation maximization (ML-EM) (Shepp and Vardi, 1982). However,
since the filtered back-projection algorithms are used mainly in image reconstruction
based on parallel-beam projections, ML-EM was employed to reconstruct images from
SemiSPECT. ML-EM maximizes the probability of the projection data set given the
image. The prototype of the reconstruction software was developed by Prof Donald W.
Wilson in our research group. This chapter covers studies with line and walnut phantoms
to evaluate the system performance and imaging various organs of mice, such as bone,
kidney, and myocardium, and human-lung tumor implanted into a nude mouse. All
tomographic images were obtained using 64 projection views and the interpolated system
matrix introduced in section 3.1. Acquisition time was prolonged according to the
radioactivity decay, and total acquisition time was determined by the sum of the
acquisition times per projection and time spent on baseline-table updates. Volume
rendering from tomographic reconstruction data was generated by AMIDE, a medical
imaging analysis program. All images in this chapter were acquired which the threshold
for determining events set to approximately 30 keV.
134
4.1. Phantom imaging
In nuclear medicine, phantoms are objects with known radioactivity and geometry,
and phantom images are utilized to visualize the spatial resolution of a system. For
phantom imaging, a line phantom and a walnut phantom were employed. Figure 4-1
shows the geometry of a line phantom made out of a plastic rod containing three groups
of holes arranged in equilateral triangle patterns. 1.5 mCi of ^^™Tc-pertechnetate aqueous
solution was used to fill up those holes. Acquisition time for the first projection was 1
minute, and total acquisition time was about 8 minutes. The tomographic images are
presented in figure 4-2 with 0.5-mm separation between neighboring slices. The volume
rendering from the reconstructed images is shown in figure 4-3.
The walnut phantom is used to estimate the feasibility of imaging complex organs in
a small animal. The walnut phantom shown in figure 4-4 was built by imprinting a half
"meat" of walnut on epoxy contained in a plastic cylinder. The walnut phantom size is
Diameter: 2 mm
Center-to-center distance: 6 mm.
Diameter: 1 mm
Center-to-center distance: 3 mm
Diameter: 1.5 mm
Center-to-center distance: 4.5 mm
Figure 4-1. Geometry of the line phantom.
135
32 mm
•^
*•
*
m
•
••
•
*
• *0
• •#
• •
•••
•••
• »
••#
• •#
•>
.*:•
:.*•
:>
.'§t'
• •#
•
. i?:.
•
••»
:•••
• •
. •.
• i?**
• •#
•
•
Figure 4-2. Tomographic images of the line phantom described in figure 4-1 using MLEM algorithm with 40 iterations and 0.5-mm spacing between slices.
136
I
%
Figure 4-3. Volume rendering of the line-phantom.
(a)
(b)
Figure 4-4. Picture of a walnut phantom in top (a) and side view (b).
137
32 mm
32 mm
•
t«c
<
41 mm
•
41 mm
f
ri
0
(a)
0
(b)
Figure 4-5. Tomographic images of a walnut phantom acquired by SemiSPECT with
0.5-mm spacing between slices (a) and a CT system with 0.48-mm spacing between
slices (b).
about 32-nim width and S-nrni depth. The walnut phantom was filled with 10 mCi of
99mTc-pertechnetate aqueous solution. Acquisition time for the first projection was 30
seconds, and the total acquisition time was about 4 minutes. Figure 4-5 presents the
tomographic images acquired by SemiSPECT (a), and a CT system belonging to the
CT/SPECT Dual-Modality system (Kastis, 2002) (b). The separation between
neighboring slices is 0.5 mm for the SPECT images and 0.48 mm for the CT images. In
the CT system, the X-ray tube was operated at a voltage of 32 kV^ and an anode current
of 0.4 mA. 180 projection views were acquired to obtain the CT images. Acquisition time
per projection was 1 second, and total acquisition time was about 3 minutes.
138
4.2. Mouse imaging
Many different kinds of organs can be imaged using various imaging agents in
nuclear medicine. Since the 1960's, lots of ^^™Tc-labelled radiopharmaceuticals have
been developed for SPECT imaging, and those used for acquiring images presented in
this section are listed in the table 4-1.
99mTc-methylene-diphosphonate (MDP), used primarily for skeletal scintigraphy, has
relatively high uptake and fast urinary excretion (Rudd et al., 1977). hi two hours after
injection of the ^^™Tc-MDP, bone contains about 50 % of the injected dose while 5 % of
it remains in blood. Since the ^^'"Tc-MDP is absorbed by various tumors, it might be used
to detect neoplasms as well. Section 4.2.2 presents a mouse bone image obtained by
^^Tc-MDP.
99mTc.Giucarate (GLA), developed in 1992, has been suggested as an imaging agent
for detecting ischemia or early necrosis of the heart or brain (Orlandi et al., 1991; Khaw
et al., 1997; Narula et al., 1997; Mariani et al., 1999). Recently, the efficiency of the
99mTc.GLA assessing myocardial injury in rat heart (Liu et al., 2004) and detecting and
99mT
99mT
c-iabelled radiopharmaceuticals
c-methylene-diphosphonate (MDP)
Application
Bone imaging
^^'"Tc-Glucarate (GLA)
Myocardium and tumor imaging
''''"Tc-Sestamibi (MIBI)
Myocardium and tumor imaging
99mT
etrofosmin
Myocardium and tumor imaging
Table 4-1. ^^'"Tc-labelled radiopharmaceuticals used for acquiring mouse images
presented in this dissertation and their applications.
139
localizing human breast cancer implanted in mice non-invasively (Liu et al., 2004) has
been verified. Furthermore, it has been found that human lung cancer can be detected by
^^"Tc-GLA. We demonstrate the imaging of human breast cancer and human lung cancer
implanted into mice using ^^"'Tc-GLA in section 4.2.4. Also kidneys and a bladder
imaged by ^^""Tc-GLA are shown in section 4.2.1.
Both ^^'"Tc-Sestamibi (MIBI) and ^^"Tc-Tetrofosmin were originally developed for
myocardial-perfusion imaging (McGoron et al., 1997; Bernard et al., 1998), but they
were evaluated for use in imaging of human breast tumors implanted in mice as well (Liu
et al., 2004). In myocardial imaging, ^^"^Tc-Tetrofosmin behaves similarly to ^^""Tc-MIBI,
but shows increased clearance fi^om non-target tissues such as blood and liver (Kelly, et
al, 1993). Mouse hearts were imaged with both the agents and are compared in section
4.2.3.
4.2.1 Kidney and bladder imaging
Kidneys, two bean-shaped organs located on each side of the backbone, filter blood
to make urine that flows into the bladder. Therefore, when any radiopharmaceutical is
injected into the body, kidneys and bladder present with high activity. So kidney and
bladder imaging can be a good benchmark for evaluating the performance of a SPECT
system.
A mouse was injected with 9.04 mCi of ^^""Tc-GLA in about 0.2 ml, and imaged
approximately 4.5 hours later. Acquisition time for the first projection was 90 seconds,
and total acquisition time was about 12 minutes.
Kidney
\ '
•
H
H
B
H
•
1
H
H
H
H
\
Bladder
Figure 4-6. Consecutive transaxial slices of kidneys and a bladder using ^^""Tc-GLA.
141
24 mm
Figure 4-7. Volume rendering of kidneys and a bladder of a mouse imaged by
'^^'"Tc-GLA.
Figure 4-6 shows the tomographic images of two kidneys and a bladder along the
transaxial direction with 0.5-mm separation between slices, and figure 4-7 shows the
volume rendering from them.
4.2.2 Bone imaging
Bone is an active organ, and some radiotracers, such as ^^'"Tc-DPD and ^^'"Tc-MDP,
concentrate in the osseous system, providing information of bone necrosis, osteomyelitis
and osteogenic sarcoma formation (O'Mara, 1972). Bone scans indicate the sites of
damage or disease as hot spots. Bone might be affected by metastatic disease as well.
Since involvement of metastatic spread in bone occurs in the late stage of common
142
68 mm
112 mm
Figure 4-8. Volume rendering of a mouse bone imaged by ^^'"Tc-MDP.
143
Incisive
bone~"
Optic canal
Zygomatii
bon^
Mandible
Ischiac
' bone
Occipital
squama
Figure 4-9. Consecutive transaxial slices of the scan of the mouse cranium from
incisive bone to occipital squama (a) and the mouse pelvic bone from ilium to ischiac
bone (b) with 0.5-mm separation between slices using ^^"Tc-MDP.
144
turmors, detecting the presence of bone metastases can identify the development stage
and extent of diseases (Cintrin et al., 1976; Galasko et al., 1981).
A mouse was injected with 6.8 mCi of ^^™Tc-MDP in about 0.2 ml and imaged
approximately 2 hours later. The mouse was euthanized by an intraperitoneal injection of
barbiturate overdose prior to imaging. Since the length of the mouse was about 105 mm,
the mouse was imaged in four different longitudinal positions. Acquisition time for the
first projection was 120 seconds, and total acquisition time was about 16 minutes. Figure
4-8 shows the volume rendering of the mouse bone, and figure 4-9 shows the consecutive
transaxial slices of the scan of the mouse cranium (a) and pelvic bone (b) with 0.5-nim
separation between slices. The tomographic images delineate the anatomy of mouse bone
such as the optic canal, zygomatic bone, and mandible in (a) and ilium and ischiac bone
in (b) in detail.
4.2.3 Myocardial imaging
Nuclear cardiac imaging provides objective, quantitative, and reproducible data on
both myocardial perfusion and viability with relatively noninvasive procedures. The
importance of nuclear cardiac imaging is well described by Iskandrian and Verani
(Iskandiran and Verani, 1996): "Further progress in nuclear cardiology is likely,
facilitating not only the detection of atherosclerosis and thrombosis but also the
quantitative assessment of regional and global coronary blood flow and the assessment of
stunning and hibernation of the myocardium."
145
'••J..
As
"STv
S
^
-v.
^
V-...,.
^
,
-x:^,
/•"^
V Kv^
r\
M (u.
f^K
^ (L :i
V --'
.
' •#
' =;i!
• -A!
: d
• •^
' Ni/
E
(b)
(a)
Figure 4-10. Consecutive transaxial slices of the heart scan of mice with
0.5-nmi separation between slices using ^^'"Tc-MIBI (a) and ^^"^Tc-Tetrofosmin (b).
19 mm
(a)
(b)
Figure 4-11. Volume rendering of mouse hearts imaged by ^^'"Tc-MIBI (a)
and ^^"Tc-Tetrofosmin (b).
146
Two imaging agents,
QQ
Tc-MIBI and
OOyvi—
Tc-Tetrofosmin were employed to obtam
images of normal mouse hearts. The first mouse was injected with 4.4 mCi of ^^"'TcMIBI in about 0.2 ml, and imaged approximately 3.5 hours later with 120-seconds
acquisition time for the first projection. Total acquisition time for the first mouse was
about 16 minutes. The second mouse was injected with 5.5 mCi of ^^""Tc-Tetrofosmin in
about 0.2 ml, and imaged approximately 2 hours later with 300-seconds acquisition time
for the first projection. Total acquisition time for the second mouse was about 40 minutes.
Figure 4-10 shows the consecutive transaxial slices of mouse hearts by ^^"Tc-MIBI (a)
and ^^Tc-Tetrofosmin (b) with 0.5-mm separation between slices, and figure 4-11 shows
the volume renderings.
4.2.4 Human cancer imaging with ^'™Tc-GLA
Human-lung breast was implanted into a mouse body, and we waited until it grew to
about 10-mm diameter cancer as shown in part (a) of figure 4-12. Then the mouse was
injected with 6.3 mCi of ^^™Tc-GLA in about 0.15 ml and imaged approximately 6 hours
later with 120-seconds acquisition time for the first projection. Total acquisition time was
about 16 minutes. Part (b) of figure 4-12 shows the volume rendering of the cancer, and
figure 4-13 presents consecutive transaxial slices of the body scan fi-om kidneys to
bladder through the cancer, with 0.5-nim separation between slices.
Similarly, human-lung cancer was implanted into a mouse body, and we waited until
it grew to about 10-mm diameter cancer as shown in part (a) of figure 4-14. Then the
mouse was injected with 6.7 mCi of ^^"Tc-GLA in about 0.2 ml and imaged
147
, Cancer
(b)
Figure 4-12. Picture of a mouse bearing human-breast cancer with about 10-mm
diameter (a) and volume rendering of it imaged by ^^"'Tc-GLA (b).
148
Kidney-'^
Cancer
Bladder-
Figure 4-13. Consecutive transaxial slices of the body scan from kidneys to
bladder through the human-breast cancer with 0.5-mm separation between
slices using ^^'"Tc-GLA
(a)
(b)
Figure 4-14. Picture of a mouse bearing human-lung cancer with about 10-mm
diameter (a) and volume rendering of it imaged by ^^'"Tc-GLA (b).
150
Kidne\"
S
' •••-5
'
Cancer-
'tA
•.
.
%
., ^
.,
h
Bladder-
Figure 4-15. Consecutive transaxial slices of the body scan from kidneys to
bladder through the human-limg cancer with 0.5-mm separation between
slices using ^^'"Tc-GLA
151
approximately 5 hours later with 180-seconds acquisition time for the first projection.
Total acquisition time for the first mouse was about 24 minutes. Part (b) of figure 4-14
shows the volume rendering of the cancer, and figure
4-15 presents consecutive
transaxial slices of the body scan fi-om kidneys to bladder through the cancer, with 0.5mm separation between slices.
152
4.3. Discussion
A noisy detector pixel might cause a number of events regardless of photon
incidence, resulting in a hot pixel on a projection view^. The hot pixel may in turn produce
a bright line in the reconstructed image. Figure 4-16 shows the volume rendering of the
human-lung cancer presented in figure 4-14 when a hot pixel existed on a projection view
(a) and after we removed it (b). It is evidently very important to remove any hot pixels in
each projection view prior to reconstruction. On the other hand, if a pixel did not respond
to any incoming photons, it can cause a dark line that might misshape the reconstructed
image as well.
Figure 4-17 demonstrates the image distortion by non-responding pixels. A
tomographic image of a radioactive cylinder having about same size as the field of view
of SemiSPECT was generated without any disabled columns in (a) of figure 4-17. The
three images in (b), (c), and (d) were reconstructed with one, three, and five disabled
columns respectively at the center of each projection view. Images are degraded
according to the number of disabled columns. One column of each camera, where clock
signals pass over, has very low responsivity because baseline values on the column are
usually out of the range for the ADC in the fi^ont-end board. This might result in image
misshape as shown in figure 4-17. One easy way to recover the column is to replace it
with the average of two neighboring columns. Figure 4-18 shows two flood images fi-om
a single camera before (a) and after (b) the recovery of the low-responsivity column. In
(a)
(b)
Figure 4-16. Volume rendering of the human-lung cancer presented in figure 4-11
when a hot pixel existed in a projection view (a) and after we removed it (b).
154
Figure 4-17. Tomographic images of a radioactive cylinder reconstructed with no
disabled columns (a), one disabled colurmi (b), three disabled columns (c), and five
disabled columns (d) at the center of each projection view.
155
(a)
(b)
Figure 4-18. Flood images from a single camera before (a) and after (b) the recovery of
the disabled column where clock signals pass through.
order to restore the other disabled pixels that might be present in projection views,
median filtering can be used.
Since all images presented in this chapter were obtained with a 30-keV threshold,
they include some photon events that have undergone Compton scattering or result from
fluorescence from the detector, gold-pinhole insert, and Cerroband used for shielding
aperture cylinder. So the images might be improved by increasing the threshold to reject
events corresponding to scattered photons. Figure 4-19 shows the tomographic images of
the line phantom described in figure 4-1, when thresholds for determining events are set
to 60 keV (a), 90 keV (b), and 120 keV (c) respectively. We can observe that the
background becomes cleaner by increasing the threshold.
156
(c)
Figure 4-19. Tomographic images of the line phantom described in figure 4-1 when
thresholds for determining events are set to 60 keV (a), 90 keV (b), and 120 keV (c),
respectively.
157
CHAPTER 5
CONCLUSIONS AND FUTURE WORK
5.1. Conclusions
The objective of this research was to build a SPECT system with high spatial and
energy resolutions for imaging small animals in biomedical research. This goal has been
well accomplished through the design and implementation of SemiSPECT. SemiSPECT
presents spatial resolution on the order of 1-2 mm, about 10 % energy resolution, and
sensitivity of about 1.5 x 10"''within the cylindrical field of view of 16.0-mm radius x
32.0-mm height. These characteristics can be varied by exchanging the aperture cylinder
and pinhole inserts for various imaging tasks.
The newly developed data-acquisition system is able to process incoming data at a 4
MHz rate independently of the host computer, so data streams from multiple cameras can
be managed simultaneously. Also, since the firmware is easily reprogrammable, the dataacquisition system can be readily adapted for any other high-speed CCD-type devices.
The 3x3 list-mode data format enables better estimation of photon energy than is
possible with a single pixel. The 1-ms temporal resolution presents the potential to
improve image quality of periodically pulsating objects such as heart and lung and will
make dynamic imaging possible eventually. The new temperature-control system keeps
the temperature variation on each detector within ±0.05 °C at 5 °C set point. Collection of
projection views is completely software controlled.
158
Animal images presented in this dissertation give us great hope that SemiSPECT will
facilitate studies related to the origin and development of cancerous lesions, and help
evaluate medical treatments for them. Reducing the cost and inherent drawbacks of
CdZnTe detectors are still left as subjects for future work, but SemiSPECT will be the
standard model of semiconductor-based gamma-ray imaging systems in the future.
5.2. Future work
There are several future modifications of SemiSPECT that can render better
performance with respect to biomedical research. Even though SemiSPECT yields highresolution images, it is always challenging to localize imaging targets in an animal body.
One suggested solution to overcome this problem is to add a CT system SemiSPECT,
upgrading to a 'CT/SemiSPECT Dual-Modality system'. Currently available CT systems
provide images with spatial resolutions of 50 |j.m or less. Figure 5-1 shows a simplified
cross-sectional drawing of a conceived CT/SemiSPECT Dual-Modality system. An x-ray
tube and a CCD x-ray camera might be mounted as shown way, and electronics to
operate both of them are needed. We will be able to adopt the software used for the CT
system of CT/SPECT Dual-Modality system (Kastis, 2002) after some modification. The
object can be moved between each system by the vertical translator.
A standing posture is abnormal for small animals, which might bring about some
change of their metabolism. In order to transform SemiSPECT into a horizontal system,
the imager with such a weight needs to be rotated in high precision. Since SemiSPECT
159
Anesthesia tube
SemiSPECT
X-ray tube
CCD camera
Animal
stage
Figure 5-1. Cross-sectional view of CT/SemiSPECT Dual-Modality system.
160
Three-translation
SemiSPECT
Motor stage
rotating the
imaser
(a)
(b)
Figure 5-2. SemiSPECT with a linear translator in horizontal orientation in front (a) and
side (b) view.
16-pinhole aperture^
Object
Copper block
(Heat sink)
Mdular camera
Figure 5-3 Transaxial view of SemiSPECT including sixteen detector arrays and a 16pinhole aperture.
161
includes eight detectors, the rotation angle can be limited to ± 22.5°. A simplified
drawing of SemiSPECT that has a linear translator in the horizontal orientation is
presented in figure 5-2.
The initial design of SemiSPECT called for sixteen modular cameras for dynamic
imaging, but not enough well functioning CdZnTe detector arrays are available to date.
To complete the 16-head SemiSPECT, the imager needs to be redesigned to support 16
arrays and all electronics and computers must be duplicated. Figure 5-3 shows the
transaxial view of SemiSPECT including sixteen modular cameras and a 16-pirLhole
aperture.
Animals under anesthesia may experience a drop in their body temperature resulting
in the change of metabolism, so a heat pad to maintain the temperature can be attached
onto the acrylic tube holding the animal. Also monitoring animal status, such as body
temperature, respiratory rate, and cardiac rate, will be helpful for interpreting the
acquired images more in detail.
162
REFERENCES
Abbas A. K., Lichtman A. H., and Pober J. S., "Cellular and molecular immunology," 4"^
ed. Saunders W. B., 2000.
Anger H. O., "Scintillation camera," Review of Scientific of Instruments, vol. 29, pp. 2733,1958.
Anger H. O., "Radioisotope cameras," Instrumentation in Nuclear Medicine, vol. 1, pp.
485-552, 1967.
Augustine F. L., "Multiplexed readout electronics for imaging spectroscopy of high
energy X-ray and gamma photons," Nuclear Instruments and Methods, A353, pp. 201204, 1994.
Akutagawa W. and Zanio K., "Gamma response of semi-insulating material in the
presence of trapping and detrapping," The Journal of Applied Physics, vol. 40, pp. 3838,
1969.
Balzer S. J., "A portable gamma-ray imager for small animal studies," M.S. Thesis.
University of Arizona, 2002.
Barber H. B., Barrett H. H., Dereniak E. L., Hartsough N. E., Perry D. L., Roberts P. C.
T., Rogulski M. M., Woolfenden J. M., and Young E. Y., "Design for a high-resolution
SPECT brain imager using semiconductor detector arrays and multiplexer readout,"
Physica Medica - Vol. IX, N. 2-3, 1993.
Barber H. B., Barrett H. H., Augustine F. L., Hamilton W. J., Apotovsky B. A., Dereniak
E. L., Doty F. P., Eskin J. D., Garcia J. P., Marks D. G., Matherson K. J., Woolfenden J.
M., and Young E. T., "Development of a 64x64 CdZnTe Array and Associated Readout
Integrated Circuit for use in nuclear medicine," The Journal of Electronic Materials, vol.
26. No. 6, 1997.
Barber H. B. and Woolfenden J. M., "Semiconductor detectors in nuclear medicine:
progress and prospects,"
chapter 13, Mosby, 1996.
Barrett H. H., Abbey C. K., Gallas B., and Eckstein M., "Stabilized estimates of
Hotelling observer detection performance in patient-structured noise," Proceedings of
SPIE 3340, 1998.
Barrett H. H., Denny J. L., Wagner R. F., and Myers K. J., "Objective assessment of
image quality. II. Fisher information, Fourier crosstalk, and figures of merit for task
performance," Journal of the Optical Society of America A, vol. 12, no. 5, pp. 834-852,
May 1995.
163
REFERENCES-Cow/mwei/
Barrett H. H., Eskin J. D., and Barber H. B., "Charge transport in arrays of semiconductor
gamma-ray detectors," Physical Review Letters, 75 (1), pp. 156-159, 1995.
Barrett H. H. and Gifford H., "Cone-beam tomography with discrete data sets," Physics
in Medicine and Biology, vol. 39, no. 3, pp. 451-476, Mar. 1994.
Barrett H. H. and Myers K. J., "Foundations of Image Science," Wiley-interscience,
2004.
Barrett H. H. and Swindell W., "Radiological imaging: The theory of image formation,
detection, and processing," New York, Academic press, 1981.
Bernard B. F., Krenning E. P., Breeman W. A., Ensing G., Benjamins H., Bakker W., J.,
Visser T. J., and de Jong M., "99mTc-MIBI, 99mTc-tetrofosmin and 99mTc-Q12 in vitro
and in vivo," Nuclear Medicine and Biology, vol. 25, pp. 233-240, 1998.
Bhaumik S. and Gambhir S. S., "Optical imaging of Renilla luciferase reporter gene
expression in living mice," Proceedings of the National Academy of Sciences of the
United States of America, vol. 99, no. 1, pp. yil-1%1, Jan. 2002.
Bloch F., "The principle of nuclear induction, in Nobel Lectures in Physics: 1946-1962,"
New York, Elsevier Science Publishing Co Inc, 1964.
Breiter H. C. and Rosen B. R., "Functional magnetic resonance imaging of brain reward
circuitry in the human," Annals of the New York Academy of Sciences, vol. 877, pp. 523547, 1999.
Cherry S. R. and Gambhir S. S., "Use of positron emission tomography in animal
research," ILAR Journal, vol. 42, pp. 219-232, 2001.
Citim D. L., Fumival C. M., and Bessent R. G., "Radioactive technetium phosphate bone
scanning in preoperative assessment and follow-up study of patients with primary cancer
of the breast," Surg Gynecol Obstet, vol. 113, pp. 363, 1976.
Coatney R. W., "Ultrasound Imaging: Principles and applications in rodent research,"
ILAR Journal, vol. 42, no. 3, pp. 233-247, 2001.
Crawford M. J., "Mechanical and thermal design and analysis of a small-animal SPECT
imager," M.S. Thesis. University of Arizona, 2003.
164
REFERENCES-Con^wweJ
Edinger M., Sweeney T. J., Tucker A. A., Olomu A. B., Negrin R. S., and Contag C. H.,
"Noninvasive assessment of tumor cell proliferation in animal models," Neoplasia, vol. 1,
pp. 303-310, 1999.
Eskin J. D., Barrett H. H., and Barber H. B., "Signals induced in semiconductor gammaray imaging detectors," The Journal of Applied Physics, vol. 85, pp. 647-659, 1999.
Fiete R. D., Barrett H. H., Smith W. E., and Myers K. J., "The Hotelling trace criterion
and its correlation with human observer performance," Journal of the Optical Society of
America A, vol. 4, pp. 945-953, 1987.
Furenlid L. R., Clarkson E., Marks D. G., and Barrett H. H., "Spatial pileup
considerations for pixellated gamma-ray detectors," IEEE Transactions on Nuclear
Science, vol. 47, pp. 1399-1403, 2000.
Furenlid L. R., Wilson D. W., Chen Y., Kim H., Pietraski P. J., Crawford M. J., and
Barrett H. H., "FASTSPECT II: A Second-Generation High-Resolution Dynamic SPECT
Imager," IEEE Transactions on Nuclear Science, vol. 51, pp. 631-635, 2004.
Gaalema S., "Low noise random-access readout technique for large PIN detector arrays,"
IEEE Transactions Nuclear Science, NS-32, pp. 417-418, 1985.
Galasko C. S. B., "The anatomy and pathways of skeletal metastases, in Weiss L, Gilbert
AH (eds): Bone Metastasis," Hall Medical Publishers, Boston, pp 49, 1981.
Gifford H. C., "Theory and application of Fourier Crosstalk: An evaluator for digitalsystem design," Ph.D. Dissertation. University of Arizona, 1997.
Graff K. F., "Ultrasonics: Historical aspects," Presented at the IEEE Symposium on
Sanies and Ultrasonics, Phoenix, Oct 26-28, 1977.
Green M. V., J. Seidel, J. J. Vaquero, E. Jagoda, I. Lee, and W. C. Eckelman, "High
resolution PET, SPECT and projection imaging in small animals," Computerized Medical
Imaging and Graphics, vol. 25, no. 2, pp. 79-86, Mar. 2001.
Hendee W. R., "Cross sectional medical imaging: A history," Radiographics, 9: 11551180,1989.
Herman, G. T., "Image reconstructions from projections, the fundamentals of
computerized tomography," New York. Academic press. 1980.
165
REFERENCES-Con/mweJ
Hilton N. R., Barber H. B., Brunett B. A., Eskin J. D., Goorsky M. S., James R. B., Lund
J. C., Marks D. G., Schlesinger T. E., Teska T. M., Van Scyoc J. M., Woolfenden J. M.,
Yonn H., "Multi-parameter high-resolution spatial maps of a CdZnTe radiation detector
array," IEEE Nuclear Science Symposium and Medical Imaging Conference Record, vol.
l,pp. 646-651, 1999.
Hoffer P. B., Beck R. N., and Gottschalk A., "The role of semiconductor detectors in the
future of nuclear medicine," New York, Society of Nuclear Medicine, 1971.
Hounsfield G., "Computerized transverse axial scanning (tomography)," Part 1.
Description of system. The Journal of Radiology, vol. 46, pp. 1016, 1973.
Iskandiran A. S. and Verani M. S., "Nuclear Cardiac Imaging: Principles and
Applications," Edition 2, 1996.
Jaszczak, R. J., Murphy P. H., Huard D., and Burdine J. A., "Radionuclide emission
computed tomography of the head with 99mTc and a scintillation camera," The Journal
of Nuclear Medicine, vol. 18, pp. 373-380, 1977.
Kane M. A. and Bunn Jr. P. A., "Preclinical Models of Lung Cancer, Biology of Lung
Cancer," Marcel Dekker vol. 122, pp. 247-293, 1998.
Kanwisher N., Mcdermott J., and Chun M. M., "The Fusiform Face Area: A Module in
Human Extrastriate Cortex Speciahzed for Face Perception," The Journal of
Neuroscience, vol. 17, pp. 4302 - 4311, 1997.
Kauffman L and Price D. C., "Semiconductor detectors in medicine," Springfield, Va.,
U.S. Atomic Energy Commission (Conf-730321). Available from National Technical
Information Center, U.S. Department of Commerce, 1973.
Kastis G. K., "Multi-modality imaging of small animals," Ph.D. dissertation. University
of Arizona, 2002.
Kastis G. K., Barber H. B., Barrett H. H., Gifford H. C., Pang I. W., Patton D. D., Sain J.
D., Stevenson G., and Wilson D. W., "High resolution SPECT imager for three
dimensional imaging of small animals, " The Journal of Nuclear Medicine, vol. 39, no. 5,
1998.
Kastis G. A., Wu M. C., Balzer S. J., Wilson D. W., Furenlid L. R., Stevenson G., Barrett
H. H., Barber H. B., Woolfenden J. M., Kelly P., and Appleby M., "Tomographic SmallAnimal Imaging Using a High-Resolution Semiconductor Camera," IEEE Transactions
on Nuclear Science, vol. 49, pp. 172-175, 2002.
166
REFERENCES-Co«//«weJ
Kelly, J. D., Forster, A. M., Higley, B., Archer, C. M., Booker, F. S., Canning, L. R.,
Chiu, K. W., Edwards, B., Gill, H. K., and McPartlin, M., "Technetium-99ni-tetrofosmin
as a new radiopharmaceutical for myocardial perfusion imaging," The Journal of Nuclear
Medicine, vol. 34, pp. 222-227, 1993.
Keyes J. W. J., Orlandea N., Heetderks W. J., Leonard P. F., and Rogers W. L., "The
Humongotron - a scintillation camera transaxial tomography," The Journal of Nuclear
Medicine, vol. 18, pp. 381-387, 1977.
Khaw B. A., Nakazawa A., O'Donnell S. M., Pak K. Y., and Narula J., "Avidity of
technetium 99m glucarate for the necrotic myocardium; in vivo and in vitro assessment,"
The Journal of Nuclear Cardiology, vol. 4, pp. 283-290, 1997.
Lauterbur P. C., "Image formation by induced local interactions: Examples employing
nuclear magnetic resonanace," Nature, vol. 242, pp. 190-191, 1973.
Ledley R, G., DiChiro, A., and Lussenhop., "Computerized transaxial x-ray tomography
of the human body," Science, vol. 186, pp. 207, 1974.
Logothetis N. K., Pauls J., Augath M., Trinath T., and Oeltermann A.,
"Neurophysiological investigation of the basis of the fMRI signal," Nature, vol. 412, pp.
150- 157, 2001.
Mariani G., Villa G., and Rossettin P. F., "Detection of acute myocardial infarction by
99mTc-iabeled D-glucaric acid imaging in patients with acute chest pain," The Journal of
Nuclear medicine, vol. 40, pp. 1832-1839, 1999.
Marks D. G., Barber H. B., Apotovsky B. A., Augustine F. L., Barrett H. H., Dereniak E.
L., Doty F. P., Eskin J. D., Hamilton W. J., Matherson K. J., Venzon J. E., Woolfenden J.
M., and Young E. T., "A 48x48 CdZnTe array with multiplexer readout," IEEE
Transactions on Nuclear Science, vol. 43, pp. 1253-1259, 1996.
Marks D. G., Barber H. B., Barrett H. H., Eskin J. D., and Woolfenden J. M.,
"Maximum-likelihood Estimation for Semiconductor Gamma-Detectors," IEEE Nuclear
Science Symposium and Medical Imaging Conference Record, vol. 1, pp. 551-555, 1999.
Marks D. G., "Estimation methods for semiconductor gamma-ray detectors," Ph.D.
Dissertation. University of Arizona, 2000.
167
REFERENCES-CowZ/nwei/
McGoron A. J., Gerson M. C., Biniakiewicz D. S., Roszel N. J., Washburn L. C., and
Millard R. W., "Extraction and retention of technetiuni-99ni Q12, technetiuni-99ni
sestamibi, and thalliuni-201 in isolated rat heart during coronary academia," European
Journal of Nuclear Medicine, vol. 24, pp. 1479-1486, 1997.
Metz C. E., "Basic principles of ROC Analysis," Seminars in Nuclear Medicine, vol. 8,
pp. 293-298, 1978.
Namla J., Petrov A., Pak K. Y., Lister B. C., and Khaw B. A., "Very early noninvasive
detection of acute experimental nonreperfused myocardial infarction with ^^'"Tc-labeled
glucarate," Circulation, vol. 95, pp. 1577-1584, 1997.
O'Doherty J., Kringelbach M. L., Rolls E. T., Homak J., and Andrews C., "Abstract
reward and punishment representations in the human orbitofrontal cortex," Nature
Neuroscience, vol. 4, pp. 95-102, 2001.
Ogawa S., Lee T. M., Kay A. R., and Tank D. W., "Brain magnetic resonance imaging
with contrast dependent on blood oxygenation," Proceedings of the National Academy of
Sciences, USA. vol. 87, pp. 9868 - 9872, 1990.
Ogawa S., Menon R. S., Tank D. W., Kim S. G., Merkle H., Ellermann J. M., and
Ugurbil K., "Functional brain mapping by blood oxygenation level-dependent contrast
magnetic resonance imaging," The Journal of Biophysics, vol. 64, pp. 803 - 812, 1993.
O'Mara R. E., "Review of new bone scan agents," Seminars on Nuclear Medicine, 1972.
Orlandi C, Crane P. D., and Edwards S., "Early scintigraphic detection of experimental
myocardial infarction in dogs with ^^'"Tc glucaric acid," The Journal of Nuclear
Medicine, vol. 32, pp. 263-268, 1991.
Owen A. M., "Memory: Dissociating multiple memory processes," Current Biology, vol.
8, pp. R850-R852, 1998.
Paix D., "Pinhole imaging of gamma rays," Physics in Medicine and Biology, vol.12, pp.
489-500, 1967.
Ploghaus A., I. Tracey, J. S. Gati, S. Clare, R. S. Menon, P. M. Matthews, and J. N.
Rawlins, "Dissociating pain from its anticipation in the human brain," Science, vol. 284,
pp. 1979- 1981, 1999.
Purcell E. M., "Research in nuclear magnetism, in Nobel Lectures in Physics: 19461962," New York, Elsevier Science Publishing Co Inc, 1964.
168
REFERENCES-Con/znwec/
Radon, J. "On the determination of fimctions from their integrals along certain manifolds
(translated)," Berichte uber die Verhandlungen der Sdchsischen Akademie der
Wissenschaften zu Leipzig, Mathematisch-Physische Klasse, vol. 69, pp. 262-277, 1917.
Raiskin E. and Butler J., "CdTe low level gamma detectors based on a new crystal
growth method," IEEE Transactions Nuclear Science, NS-35(1), pp. 82-84, 1988.
Rees G., Friston K., and Koch C., "A direct quantitative relationship between the
functional properties of human and macaque V5," Nature Neuroscience, vol. 3, pp. 716723, 2000.
Restelli G. and Rota A., "Mean energy required for hole-electron pair creation and the
Fano factor," In Bertolini G, Coche A, editors: Semiconductor detectors. New York, John
Wiley &. Sons, pp. 75-99, 1968.
Rice B. W., Cable M. D., and Nelson M. B., "In vivo imaging of light-emitting probes,"
The Journal of Biomedicine and Biotechnology, Opt 6, pp. 432-440, 2001.
Rowe R. K., "A system for three-dimensional SPECT without motion," Ph.D.
Dissertation. University of Arizona, 1991.
Rudd T. G., Allen D. R., and Hartnett D. E., "Tc-99m methylene diphosphonate versus
Tc-99m pyrophosphate: biologic and clinical comparison," The Journal of Nuclear
Medicine, vol. 18, pp. 872-876, 1977.
Sain J. D., "Optical Modeling, design optimization, and performance analysis of a
gamma camera for detection of breast cancer," Ph.D. dissertation. University of Arizona,
2001.
Shepp L. A. and Vardi Y., "Maximum likelihood reconstruction for emission
tomography," IEEE Transactions on Medical Imaging, vol. 1, no. 2, pp. 113-122, 1982.
Sherrington C. and Roy C., "On the regulation of the blood supply of the brain," The
Journal of Physiology (London), vol. 11, pp. 85-108, 1890.
Smith W. E., and Barrett H. H., "Hotelling trace criterion as a figure of merit for the
optimization of imaging systems," Journal of the Optical Society of America A, vol. 3, pp.
717-725, 1986.
169
REFERENCES-Co«//nweJ
Sweeney T. J., Mailander V., Tucker A. A., Olomu A. B., Zhang W, Cao Y, Negrin R. S.,
and Contag C. H., "Visualizing the kinetics of tumor cell clearance in living animals,"
PNAS, 96 (21), pp. 12044-9, 1999.
Wendy P., "Bioluminescence: Shedding New light on biomedical research," Harvard
Science Review, winter 2002.
White T. A., "SPECT reconstruction directly from photomultiplier signals," Ph.D.
Dissertation, University of Arizona, 1994.
Zhonglin Liu, Barrett, H. H., Gail D. S., Kastis G. A., Bettan M., Furenlid L. R., Wilson
D. W., and Pak K. Y., "High-resolution imaging with ^^'"Tc-Glucarate for assessing
myocardial injury in rat heart models exposed to different durations of ischemia with
reperfusion," The Journal of Nuclear Medicine, vol. 45, pp. 1251-1259, 2004.
Zhonglin Liu, Gail D. S., Barrett, H. H., Kastis G. A., Bettan M., Furenlid L. R., Wilson
D. W., and Woolfenden J. M. "Imaging recognition of multidrug resistance in human
breast tumors using ^^'"Tc-labeled monocationic agents and a high-resolution stationary
SPECT system," Nuclear Medicine and Biology, vol. 31, pp. 53-65, 2004.
Zhonglin Liu, Gail D. S., Barrett, H. H., Kastis G. A., Bettan M., Furenlid L. R., Wilson
D. W., Woolfenden J. M., and Pak K. Y., "^^Tc glucarate high-resolution imaging of
drug sensitive and drug resistant human breast cancer zenografts in SCID mice," Nuclear
Medicine Communications, (in press), 2004.
Ziegler N., "Optimum settings for automatic controllers," Transactions ASME, vol. 64,
pp. 759-768, 1942.