Analysis of laminated shells by a sinusoidal shear
advertisement

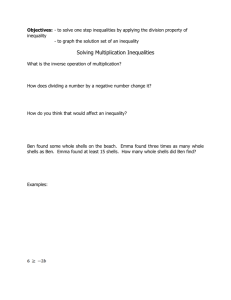
Author's personal copy Composites: Part B 42 (2011) 1276–1284 Contents lists available at ScienceDirect Composites: Part B journal homepage: www.elsevier.com/locate/compositesb Analysis of laminated shells by a sinusoidal shear deformation theory and radial basis functions collocation, accounting for through-the-thickness deformations A.J.M. Ferreira a,⇑, E. Carrera c, M. Cinefra c, C.M.C. Roque b, O. Polit d a Departamento de Engenharia Mecânica, Faculdade de Engenharia da, Universidade do Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal INEGI, Faculdade de Engenharia da Universidade do Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal Departament of Aeronautics and Aerospace Engineering, Politecnico di Torino, Corso Duca degli Abruzzi, 24, 10129 Torino, Italy d Université Paris Ouest – Nanterre, 50 rue de Sevres, 92410 Ville d’Avray, France b c a r t i c l e i n f o Article history: Received 26 October 2010 Received in revised form 23 January 2011 Accepted 27 January 2011 Available online 26 February 2011 Keywords: A. Laminates B. Vibration C. Numerical analysis a b s t r a c t In this paper, the static and free vibration analysis of laminated shells is performed by radial basis functions collocation, according to a sinusoidal shear deformation theory (SSDT). The SSDT theory accounts for through-the-thickness deformation, by considering a sinusoidal evolution of all displacements with the thickness coordinate. The equations of motion and the boundary conditions are obtained by the Carrera’s Unified Formulation, and further interpolated by collocation with radial basis functions. Ó 2011 Elsevier Ltd. All rights reserved. 1. Introduction The efficient load-carrying capabilities of shell structures make them very useful in a variety of engineering applications. The continuous development of new structural materials leads to ever increasingly complex structural designs that require careful analysis. Although analytical techniques are very important, the use of numerical methods to solve shell mathematical models of complex structures has become an essential ingredient in the design process. The most common mathematical models used to describe shell structures may be classified in two classes according to different physical assumptions: the Koiter model [1], based on the Kirchhoff hypothesis and the Naghdi model [2], based on the Reissner–Mindlin assumptions that take into account the transverse shear deformation. In this paper, the Unified Formulation (UF) by Carrera [3–8] is proposed to derive the equations of motion and boundary conditions. This formulation contains a large variety of 2D models that differ in the order of used expansion in thickness direction and in the manner the variables are modelled along the thickness. In particular, the UF is here applied to analyse laminated shells by radial basis functions (RBF) collocation, according to a sinus-based shear deformation theory that accounts for through-the-thickness ⇑ Corresponding author. E-mail address: ferreira@fe.up.pt (A.J.M. Ferreira). 1359-8368/$ - see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.compositesb.2011.01.031 deformations. This theory is an expansion of the developments by Touratier [9–11], and Vidal and Polit [12]. It allows a sinusoidal variation of all displacement components along the thickness and it is more convenient than the classical Taylor polynomials because the sine function can be expressed by means of Taylor expansion. Moreover, the derivative of displacements in the deformations does not reduce the order of the approximating functions. The choice of the sine function can be justified from the three-dimensional point of view, using the work of Cheng [13]. As it can be seen in Polit [14], a sine term appears in the solution of the shear equation (see Eq. (7) in [2]). Therefore, the kinematics proposed can be seen as an approximation of the exact three-dimensional solution. Furthermore, the sine function has an infinite radius of convergence and its Taylor expansion includes not only the third-order terms but all the odd terms. The most common numerical procedure for the analysis of the shells is the finite element method [15–19]. It is known that the phenomenon of numerical locking may arise from hidden constrains that are not well represented in the finite element approximation and, in scientific literature, it is possible to find many methods to overcome this problem [20–25]. The present paper, that performs the bending and free vibration analysis of laminated shells by collocation with radial basis functions, avoids the locking phenomenon. A radial basis function, /(kx xjk) is a spline that depends on the Euclidian distance between distinct data centers xj;j ¼ 1; 2; . . . ; N 2 Rn , also called nodal or collocation points. The Author's personal copy 1277 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 so-called unsymmetrical Kansa method, introduced by Kansa [26], is employed. The use of radial basis function for the analysis of structures and materials has been previously studied by numerous authors [27–41]. The authors have recently applied the RBF collocation to the static deformations of composite beams and plates [42–44]. In this paper it is investigated for the first time how the Unified Formulation can be combined with radial basis functions to the analysis of thin and thick laminated shells, using the SSDT, allowing for through-the-thickness deformations. The quality of the present method in predicting static deformations and free vibrations of thin and thick laminated shells is compared and discussed with other methods in some numerical examples. 2. Applying the Unified Formulation to SSDT The Unified Formulation proposed by Carrera, also known as CUF, is a powerful framework for the analysis of beams, plates and shells. This formulation has been applied in several finite element analysis, either using the Principle of Virtual Displacements, or by using the Reissner’s Mixed Variational theorem. The stiffness matrix components, the external force terms or the inertia terms can be obtained directly with this UF, irrespective of the shear deformation theory being considered. In this section, it is shown how to obtain the fundamental nuclei, which allows the derivation of the equations of motion and boundary conditions according to CUF, in weak form for the finite element analysis and in strong form for the present RBF collocation. 3. A sinus shear deformation theory The present sinus shear deformation theory involves the following expansion of displacements pz u3 ; h pz w3 ¼ w0 þ zw1 þ sin h u ¼ u0 þ zu1 þ sin v ¼ v 0 þ zv 1 þ sin pz h v 3; w ð1Þ where u0, v0 and w0 are translations of a point at the middle-surface of the plate, and u1, v1, u3, v3 denote rotations. This theory is an expansion of early developments by Touratier [9–11], and Vidal and Polit [12]. It considers a sinusoidal variation of all displacements u, v, w, allowing for through-the-thickness deformations. Extension to shells becomes evident in the next sections. the other two in-plane dimensions. Geometry and the reference system are indicated in Fig. 1. The square of an infinitesimal linear segment in the layer, the associated infinitesimal area and volume are given by: 2 2 dV ¼ k 2 ð2Þ Ha Hkb Hkz d a db dz where the metric coefficients are: Hka ¼ Ak ð1 þ z=Rka Þ; Hkb ¼ Bk ð1 þ z=Rkb Þ; Hkz ¼ 1 ð3Þ k Rkb k denotes the k-layer of the multilayered shell; Ra and are the principal radii of curvature along the coordinates a and b, respectively. Ak and Bk are the coefficients of the first fundamental form of Xk (Ck is the Xk boundary). In this work, the attention has been restricted to shells with constant radii of curvature (cylindrical, spherical, toroidal geometries) for which Ak = Bk = 1. Although one can use the UF for one-layer, isotropic shell, a multi-layered shell with Nl layers is considered. The Principle of Virtual Displacements (PVD) for the pure-mechanical case reads: Nl Z X k¼1 Z n Xk Ak dkpG T o T rkpC þ dknG rknC dXk dz ¼ Nl X dLke ð4Þ k¼1 where Xk and Ak are the integration domains in plane (a, b) and z direction, respectively. Here, k indicates the layer and T the transpose of a vector, and dLke is the external work for the kth layer. G means geometrical relations and C constitutive equations. The steps to obtain the governing equations are: Substitution of the geometrical relations (subscript G). Substitution of the appropriate constitutive equations (subscript C). Introduction of the Unified Formulation. Stresses and strains are separated into in-plane and normal components, denoted, respectively, by the subscripts p and n. The mechanical strains in the kth layer can be related to the displacement field uk ¼ fuka ; ukb ; ukz g via the geometrical relations: kpG ¼ ½kaa ; kbb ; kab T ¼ ðDkp þ Akp Þuk ; knG ¼ ½kaz ; kbz ; kzz T ¼ ðDknX þ Dknz Akn Þuk ð5Þ The explicit form of the introduced arrays follows: 2 @a 6 6 0 Dkp ¼ 6 6 4@ b Shells are bi-dimensional structures in which one dimension (in general the thickness in z direction) is negligible with respect to 2 dXk ¼ Hka Hkb da db Hka 3.1. Governing equations and boundary conditions in the framework of Unified Formulation 2 dsk ¼ Hka da2 þ Hkb db2 þ Hkz dz Hkb 0 @b Hkb @a Hka 0 3 7 7 0 7; 7 5 0 2 DknX 0 0 6 ¼6 40 0 Fig. 1. Geometry and notations for a multilayered shell (doubly curved). 0 0 @a Hka 3 7 @b 7 ; Hkb 5 0 2 @z 6 Dknz ¼ 4 0 0 0 @z 0 0 3 7 0 5; @z ð6Þ Author's personal copy 1278 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 2 1 Hka Rka 0 0 6 k 6 Ap ¼ 4 0 0 3 2 7 1 7 ; Hkb Rkb 5 0 0 1 H k Rk 6 a a Akn ¼ 6 4 0 0 0 0 1 Hkb Rkb 0 0 3 7 07 5 ð7Þ 0 The 3D constitutive equations are given as: rkpC ¼ Ckpp kpG þ Ckpn knG rknC ¼ Cknp kpG þ Cknn knG ð8Þ with 2 C k11 6 k Ckpp ¼ 6 4 C 12 2 C k12 C k22 C k16 C k26 0 0 6 Cknp ¼ 4 0 C k13 0 C k23 C k16 3 2 7 C k26 7 5; C k66 0 0 0 C k13 3 7 6 k 7 Ckpn ¼ 6 4 0 0 C 23 5; 2 3 0 0 C k36 C k55 6 k Cknn ¼ 6 4 C 45 0 7 0 5; k C 36 C k45 C k44 0 0 3 ð9Þ 7 0 7 5 C k33 According to the Unified Formulation by Carrera, the three displacement components ua, ub and uz and their relative variations can be modelled as: ðua ; ub ; uz Þ ¼ F s ðuas ; ubs ; uzs Þ; ðdua ; dub ; duz Þ ¼ F s ðduas ; dubs ; duzs Þ ð10Þ where the Fs are functions of the thickness coordinate z and s is a sum index. Taylor expansions from first- up to fourth-order are employed: F0 = z0 = 1, F1 = z1 = z,. . ., FN = zN,. . ., F4 = z4 if an Equivalent Single Layer (ESL) model is used. For ESL approach, one means that the displacements are assumed for the whole laminate if a multilayer structure is considered. Resorting to the displacement field in Eq. (10), the vectors F t ¼ 1 z sin phz are chosen for the displacements u, v, w. Then, all the terms of the equations of motion are obtained by integrating through the thickness direction. It is interesting to note that under this combination of the Unified Formulation and RBF collocation, the collocation code depends only on the choice of Ft, in order to solve this type of problems. A MATLAB code has been designed that, just by changing Ft, can analyse static deformations, and free vibrations for any type of C shear deformation theory. An obvious advantage of the present methodology is that the tedious derivation of the equations of motion and boundary conditions for a particular shear deformation theory is no longer an issue, as this MATLAB code does all that work for us. In Fig. 2, it is shown the assembling procedures of the stiffness matrix on layer k for the ESL approach. Substituting the geometrical relations, the constitutive equations and the Unified Formulation into the variational statement PVD, for the kth layer, one has: (Z Nl X Z n Xk k¼1 T k C pp ðDp þ Ap Þuk þ C kpn ðDnX þ Dnz An Þuk ðDp þ Ap Þduk Ak T k þ ðDnX þ Dnz An Þduk C np ðDp þ Ap Þuk ) N o l X k k dLke dXk dzk ¼ þC nn ðDnX þ Dnz An Þu Fig. 2. Assembling procedure for ESL approach. Z X T ðDX Þdak ak dXk ¼ Xk Z Xk þ Z ð11Þ (Z Nl X Xk k¼1 Ck where IX matrix is obtained applying the Gradient theorem: Z n h dukT ðDp þ Ap ÞT F s ðC kpp ðDp þ Ap ÞF s uks s Ak i þC kpn ðDnX þ Dnz An ÞF s uks Þ h ðDnX þ Dnz An ÞT F s ðC knp ðDp þ Ap ÞF s uks þ dukT s io o þC knn ðDnX þ Dnz An ÞF s uks Þ dXk dzk (Z Z Nl n h X dukT I Tp F s ðC kpp ðDp þ Ap ÞF s uks þ s Ck k¼1 Ak i h þ dukT I Tnp F s ðC knp ðDp Ap ÞF s uks s (Z ) Nl o X io k þC knn ðDnX þ Dnz An ÞF s uks Þ dCk dzk ¼ dukT F p s u s þC kpn ðDnX þ Dnz An ÞF s uks Þ k¼1 ð14Þ Xk where Ikp and Iknp depend on the boundary geometry: 2 na 0 Ha 6 0 Ip ¼ 6 4 0 7 0 7; 5 0 nb Hb nb Hb 3 na Ha 2 Inp 0 0 6 ¼ 40 0 na Ha nb Hb 0 0 0 3 7 5 ð15Þ ^¼ n na nb " ¼ cosðua Þ # ð16Þ cosðub Þ ^ and the where ua and ub are the angles between the normal n direction a and b, respectively. The governing equations for a multi-layered shell subjected to mechanical loadings are: T dak ðDTX Þak dXk T dak ðIX Þak dCk ð13Þ The normal to the boundary of domain X is: At this point, the formula of integration by parts is applied: ni w ds C ^ to the boundary along the being ni the components of the normal n direction i. After integration by parts and the substitution of CUF, the governing equations and boundary conditions for the shell in the mechanical case are obtained: k¼1 Z I @w dt ¼ @xi ð12Þ T duks : Kkuuss uks ¼ Pkus where the fundamental nucleus ð17Þ kss Kuu is obtained as: Author's personal copy 1279 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 Z h kss K uu ¼ Ak ½Dp þ Ap T C kpp ½Dp þ Ap þ ½Dp þ Ap T C kpn ½DnX þ Dnz An þ ½DnX þ Dnz An T C knp ½Dp þ Ap þ½DnX þ Dnz An T C knn ½DnX þ Dnz An i Ksuusk 23 1 k ss s 1 k ss s J @ b C k22 J @ C k23 J kassz @ sb C k16 Rak Rbk a=b b 1 kss s 1 k ss s J @ C k26 J @ a C k36 J kbssz @ sa Rak b=a a Rbk 1 kss s 1 k ss s þ C k45 J kbsz s @ sa J @ a þ C k44 J kasz s @ sb J a=b @ b Rbk Rbk k F s F s Ha Hkb dz ð18Þ and the corresponding Neumann-type boundary conditions on Ck are: ks Pdkss uks ¼ Pdkss u ð19Þ Ksuusk 31 where Z h I Tp C kpp ½Dp þ Asp þ I Tp C kpn ½DnX þ Dnz Asn þ I Tnp C knp ½Dp þ Asp i þI Tnp C knn ½DnX þ Dnz Asn F s F s Hka Hkb dz ð20Þ Pdkss ¼ ¼ C k12 Ak and Pkus are variationally consistent loads with applied pressure. Ksuusk 3.2. Fundamental nuclei 32 The following integrals are introduced to perform the explicit form of fundamental nuclei: Z H a Hb J kss ; J kass ; J kbss ;J ka ss ; J kb ss ;J kasbs ¼ F s F s 1;Ha ; Hb ; ; ;Ha Hb dz b a Hb H a Ak Z @F Ha Hb s ksz s ksz s ksz s ksz s ksz s ksz s F s 1;Ha ;Hb ; ; ;Ha Hb dz J ; J a ; J b ;J a ; J b ; J ab ¼ b a Hb Ha Ak @z Z @F H s a Hb J kssz ; J kassz ; J kbssz ;J ka ssz ; J kb ssz ; J kasbsz ¼ Fs 1;Ha ;Hb ; ; ;Ha Hb dz b a @z Hb Ha Ak Z @F @F s s J ksz sz ;J kasz sz ;J kbsz sz ;J ka sz sz ;J kb sz sz ;J kasbz sz ¼ b a Ak @z @z Ha H b ð21Þ 1; Ha ; Hb ; ; ; Ha Hb dz H b Ha Ksuusk 33 1 kss s 1 kss s 1 kss s J @ þ C k12 J @ a þ C k13 J kbsz s @ sa þ C k16 J @b Rak b=a a Rbk Rak 1 k ss s 1 k ss s þ C k26 J a=b @ b þ C k36 J kasz s @ sb C k45 J kassz @ sb J @b Rbk Rak 1 k ss s C k55 J kbssz @ sa J @ Rak b=a a ¼ C k11 1 kss s 1 kss s 1 kss s J @ b þ C k22 J @ þ C k23 J kasz s @ sb þ C k16 J @ Rak Rbk a=b b Rak b=a a 1 k ss s 1 kss s þ C k26 J @ a þ C k36 J bksz s @ sa C k45 J kbssz @ sa J @a Rbk Rbk 1 J k ss @ s C k44 J kassz @ sb Rbk a=b b ¼ C k12 ¼ C k11 1 2 J kb=sas þ C k22 1 J kas=bs R2bk þ C k33 J kasbz sz þ 2C k12 1 Rak Rak 1 k ss 1 k sz s J þ C k13 J b þ J kbssz þ C k23 Rbk Rak 1 k sz s k ss s s J a þ J kassz C k44 J kas=bs @ sb @ sb C k55 J b= a@a@a Rbk C k45 J kss @ sa @ sb C k45 J kss @ sa @ sb ð22Þ The fundamental nuclei Kkuuss is reported for doubly curved shells (radii of curvature in both a and b directions (see Fig. 1)): The application of boundary conditions makes use of the fundamental nuclei Pd in the form: Ksuusk ssk k k ss s k k ss s k k ss s k ss s Puu 11 ¼ na C k11 J b= a @ a þ nb C 66 J a=b @ b þ nb C 16 J @ a þ na C 16 J @ b ssk k k ss s k kss s k kss s k ss s Puu 12 ¼ na C k16 J b= a @ a þ nb C 26 J a=b @ b þ na C 12 J @ b þ nb C 66 J @ a ssk 1 k kss 1 k k ss 1 k kss Puu 13 ¼ na C J þ na C J þ na C k13 J kbssz þ nb C J Rak 11 b=a Rbk 12 Rak 16 1 k k ss þ nb C J þ nb C k36 J kassz Rbk 26 a=b ssk k k ss s k k ss s k k ss s k ss s Puu 21 ¼ na C k16 J b= a @ a þ nb C 26 J a=b @ b þ nb C 12 J @ a þ na C 66 J @ b ssk k k ss s k k ss s k k ss s Puu 22 ¼ na C 66 J b=a @ a þ nb C 22 J a=b @ b þ nb C 26 J @ a þ na C k26 Jkss @ sb ssk 1 k kss 1 k k ss 1 k kss Puu 23 ¼ na C J þ na C J þ na C k36 J kbssz þ nb C J Rak 16 b=a Rbk 26 Rak 12 1 k k ss þ nb C J þ nb C k23 J kassz Rbk 22 a=b ssk 1 k k ss 1 k kss Puu 31 ¼ na C J þ na C k55 J kbssz nb C J þ nb C k45 J kassz Rak 55 b=a Rak 45 ssk 1 k k ss 1 k k ss Puu 32 ¼ na C J þ na C k45 J kbssz nb C J þ nb C k44 J kassz Rbk 45 Rbk 44 a=b ssk k k ss s k k ss s k k ss s k ss s Puu 33 ¼ na C k55 J b= a @ a þ nb C 44 J a=b @ b þ nb C 45 J @ a þ na C 45 J @ b ð23Þ 11 k k ss s s k k ss s s k kss s s k ss s s ¼ C k11 J b= a @ a @ a C 16 J @ a @ b C 16 J @ a @ b C 66 J a=b @ b @ b ! 1 ksz s 1 kssz 1 k ss þ C k55 J kasbz sz J J þ 2 J b= a Rak b Rak b Ra k Ksuusk 12 Ksuusk 13 Ksuusk 21 Ksuusk 22 k k ss s s k kss s s k ss s s ¼ C k12 J kss @ sa @ sb C k16 J b= a @ a @ a C 26 J a=b @ b @ b C 66 J @ a @ b 1 k sz s 1 k ssz 1 1 kss þ C k45 J kasbz sz Ja Jb þ J Rbk Rak Rak Rbk 1 k ss s 1 k ss s 1 k ss s J @ C k12 J @ a C k13 J kbssz @ sa C k16 J @b Rak b=a a Rbk Rak 1 k ss s 1 k ss s C k26 Ja=b @ b C k36 J kassz @ sb þ C k45 J kasz s @ sb J @b Rbk Rak 1 k ss s þ C k55 J bksz s @ sa J @ Rak b=a a ¼ C k11 k k ss s s k kss s s k ss s s ¼ C k12 J kss @ sa @ sb C k16 J b= a @ a @ a C 26 J a=b @ b @ b C 66 J @ a @ b 1 k ssz 1 k sz s 1 1 kss þ C k45 J kasbz sz J J þ J Rbk a Rak b Rak Rbk ¼ C k22 J kas=bs @ sb @ sb C k26 J kss @ sa @ sb C k26 J kss @ sa @ sb C k66 J kb=sas @ sa @ sa ! 1 k sz s 1 k ssz 1 kss k ksz sz þ C 44 J ab J J þ 2 J a=b Rbk a Rbk a Rb k One can note that all the equations written for the shell degenerate in those for the plate when R1 ¼ R1 ¼ 0. In practice, the radii of curak bk vature are set to 109. 3.3. Dynamic governing equations The PVD for the dynamic case is expressed as: Author's personal copy 1280 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 Nl Z X Z n Xk k¼1 ¼ Ak Nl Z X k¼1 dkpG Z Xk T T o 4.2. The eigenproblem rkpC þ dknG rknC dXk dz k kT € k q du u dXk dz þ Ak Nl X dLke ð24Þ k¼1 where qk is the mass density of the kth layer and double dots denote acceleration. By substituting the geometrical relations, the constitutive equations and the Unified Formulation, one obtains the following governing equations: The eigenproblem looks for eigenvalues (k) and eigenvectors (u) that satisfy Lu þ ku ¼ 0 in X ð30Þ LB u ¼ 0 on @ X ð31Þ As in the static problem, the eigenproblem defined in (30) and (31) is replaced by a finite-dimensional eigenvalue problem, based on RBF approximations. 4.3. Radial basis functions approximations T k ss k € ks þ Pkus duks : Kuu us ¼ Mkss u ð25Þ The radial basis function (/) approximation of a function (u) is given by In the case of free vibrations one has: T k ss k € ks duks : Kuu us ¼ Mkss u ð26Þ ~ ðxÞ ¼ u N X ai /ðkx yi k2 Þ; x 2 Rn ð32Þ i¼1 where Mkss is the fundamental nucleus for the inertial term. The explicit form of that is: where yi, i = 1, . . . , N is a finite set of distinct points (centers) in Rn . The most common RBFs are /ðrÞ ¼ r 3 k ss M11 ¼ qk J kasbs Cubic : k ss M12 ¼0 Thin plate splines : Wendland functions : k ss M13 ¼0 Gaussian : k ss ¼0 M21 k ss M22 ¼ qk J kasbs ð27Þ k ss ¼0 M31 ¼0 k ss M33 ¼ qk J kasbs /ðrÞ ¼ eðcrÞ Multiquadrics : /ðrÞ ¼ Inverse multiquadrics : k ss M23 ¼0 k ss M32 /ðrÞ ¼ r2 logðrÞ where the meaning of the integral Jkasbs has been illustrated in Eq. (21). The geometrical and mechanical boundary conditions are the same of the static case. Because the static case is only considered, the mass terms will be neglected. /ðrÞ ¼ ð1 rÞm þ pðrÞ 2 pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi c2 þ r 2 /ðrÞ ¼ ðc2 þ r 2 Þ1=2 where the Euclidian distance r is real and non-negative and c is a positive shape parameter. Hardy [45] introduced multiquadrics in the analysis of scattered geographical data. In the 1990s Kansa [26] used multiquadrics for the solution of partial differential equations. Considering N distinct interpolations, and knowing u(xj), j = 1, 2, . . . , N, one finds ai by the solution of a N N linear system Aa ¼ u where A = [/(kx yik2)]NN, u = [u(x1), u(x2), . . . , u(xN)]T. ð33Þ a = [a1, a2, . . . , aN] T and 4. The radial basis function method 4.4. Solution of the static problem 4.1. The static problem The solution of a static problem by radial basis functions considers NI nodes in the domain and NB nodes on the boundary, with a total number of nodes N = NI + NB. One can denote the sampling points by xi 2 X, i = 1, . . . , NI and xi 2 oX, i = NI + 1, . . . , N. At the points in the domain, the following system of equations is solved Radial basis functions (RBF) approximations are mesh-free numerical schemes that can exploit accurate representations of the boundary, are easy to implement and can be spectrally accurate. In this section the formulation of a global unsymmetrical collocation RBF-based method to compute elliptic operators is presented. Consider a linear elliptic partial differential operator L and a bounded region X in Rn with some boundary oX. In the static problems, the displacements (u) are computed from the global system of equations Lu ¼ f in X ð28Þ LB u ¼ g on @ X ð29Þ where L; LB are linear operators in the domain and on the boundary, respectively. The right-hand side of (28) and (29) represent the external forces applied on the plate or shell and the boundary conditions applied along the perimeter of the plate or shell, respectively. The PDE (Partial Differential Equation) problem defined in (28) and (29) will be replaced by a finite problem, defined by an algebraic system of equations, after the radial basis expansions. N X ai L/ðkx yi k2 Þ ¼ fðxj Þ; j ¼ 1; 2; . . . ; NI ð34Þ i¼1 or LI a ¼ F ð35Þ where LI ¼ ½L/ðkx yi k2 ÞNI N ð36Þ At the points on the boundary, the following boundary conditions are imposed N X ai LB /ðkx yi k2 Þ ¼ gðxj Þ; j ¼ NI þ 1; . . . ; N ð37Þ i¼1 or Ba ¼ G ð38Þ Author's personal copy 1281 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 tion w = 0, on a simply supported or clamped edge. The conditions are enforced by interpolating as where B ¼ LB / kxNI þ1 yj k2 N B N w¼0! LI # a¼ B ð39Þ G 4.5. Solution of the eigenproblem ai L/ðkx yi k2 Þ ¼ ku~ ðxj Þ; j ¼ 1; 2; . . . ; NI ð40Þ i¼1 or ~I LI a ¼ ku v 0 ¼ V 0 ðx; yÞe u1 ¼ U 1 ðx; yÞeixt ; v 1 ¼ V 1 ðx; yÞe ; w0 ¼ W 0 ðx; yÞeixt ; ixt ; w1 ¼ W 1 ðx; yÞeixt ; u3 ¼ U 3 ðx; yÞeixt ð50Þ v 3 ¼ V 3 ðx; yÞeixt ð51Þ w3 ¼ W 3 ðx; yÞeixt ð52Þ where x is the frequency of natural vibration. Substituting the harmonic expansion into Eq. (45) in terms of the amplitudes U0, U1, U3, V0, V1, V3, W0, W1, W3, one can obtain the natural frequencies and vibration modes for the plate or shell problem, by solving the eigenproblem ð42Þ where L collects all stiffness terms and G collects all terms related to the inertial terms. In (53) X are the modes of vibration associated with the natural frequencies defined as x. ð43Þ i¼1 ð53Þ 5. Numerical examples All numerical examples consider a Chebyshev grid (see Fig. 3) and a Wendland function, defined as /ðrÞ ¼ ð1 crÞ8þ 32ðcrÞ3 þ 25ðcrÞ2 þ 8cr þ 1 or Ba ¼ 0 ð44Þ Eqs. (41) and (44) can now be solved as a generalized eigenvalue problem " ix t L x2 G X ¼ 0 At the points on the boundary, the imposed boundary conditions are ai LB /ðkx yi k2 Þ ¼ 0; j ¼ NI þ 1; . . . ; N For free vibration problems, the external forces are set to zero, and an harmonic solution is assumed for the displacements u0, u1, v0, v1, . . . ð41Þ where LI ¼ ½L/ðkx yi k2 ÞNI N 4.7. Free vibrations problems u0 ¼ U 0 ðx; yÞeixt ; Consider NI nodes in the interior of the domain and NB nodes on the boundary, with N = NI + NB. The interpolation points are denoted by xi 2 X, i = 1, . . . , NI and xi 2 oX, i = NI + 1, . . . , N. At the points in the domain, the following eigenproblem is defined N X ð49Þ Other boundary conditions are interpolated in a similar way. F By inverting the system (39), one obtains the vector a. Then, the solution u is calculated using the interpolation Eq. (32). N X aW j /j ¼ 0 j¼1 Therefore, one can write a finite-dimensional static problem as " N X LI # B " a¼k AI # 0 ð54Þ where the shape parameter (c) was obtained by an optimization procedure, as detailed in Ferreira and Fasshauer [46]. 5.1. Spherical shell in bending a ð45Þ where A laminated composite spherical shell is here considered, of side a and thickness h, composed of layers oriented at [0°/90°/0°] AI ¼ / ðkxNI yj k2 Þ N N Chebyshev grid I 1 4.6. Discretization of the equations of motion and boundary conditions 0.8 0.6 The radial basis collocation method follows a simple implementation procedure. Taking Eq. (39), one computes a¼ #1 F L G B I ð46Þ ~ , by using (32). If This a vector is then used to obtain solution u ~ are needed, such derivatives are computed as derivatives of u 0.4 y−coordinates " 0.2 0 −0.2 −0.4 N ~ X @/ @u ¼ aj j @x @x j¼1 ð47Þ N ~ X @2/ @2u ¼ aj 2j ; etc: 2 @x @x j¼1 ð48Þ −0.6 −0.8 In the present collocation approach, one needs to impose essential and natural boundary conditions. Consider, for example, the condi- −1 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 x−coordinates Fig. 3. A sketch of a Chebyshev grid for 13 13 points. 0.8 1 Author's personal copy 1282 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 Table 1 3 2 ¼ w 10P Ea24h variation with various number of grid points per unit length, N for different R/a ratios, for R1 = R2. Non-dimensional central deflection, w 0 a/h [0°/90°/0°] [0°/90°/90°/0°] Method R/a 5 10 20 50 100 109 10 10 10 10 10 Present (13 13) Present (17 17) Present (21 21) HSDT [47] FSDT [47] 6.6874 6.6879 6.6880 6.7688 6.4253 6.9044 6.9047 6.9048 7.0325 6.6247 6.9615 6.9618 6.9618 7.1016 6.6756 6.9781 6.9784 6.9784 7.1212 6.6902 6.9806 6.9809 6.9809 7.1240 6.6923 6.9816 6.9819 6.9820 7.125 6.6939 100 100 100 100 100 Present (13 13) Present (17 17) Present (21 21) HSDT [47] FSDT [47] 1.0244 1.0249 1.0250 1.0321 1.0337 2.3651 2.3661 2.3662 2.4099 2.4109 3.5151 3.5165 3.5167 3.617 3.6150 4.0692 4.0707 4.0709 4.2071 4.2027 4.1629 4.1644 4.1646 4.3074 4.3026 4.1951 4.1966 4.1966 4.3420 4.3370 10 10 10 10 10 Present (13 13) Present (17 17) Present (21 21) HSDT [47] FSDT [47] 6.7199 6.7204 6.7205 6.7865 6.3623 6.9418 6.9423 6.9423 7.0536 6.5595 7.0004 7.0007 7.0008 7.1237 6.6099 7.0174 7.0178 7.0178 7.1436 6.6244 7.0201 7.0204 7.0204 7.1464 6.6264 7.0211 7.0214 7.0215 7.1474 6.6280 100 100 100 100 100 Present (13 13) Present (17 17) Present (21 21) HSDT [47] FSDT [47] 1.0190 1.0195 1.0195 1.0264 1.0279 2.3581 2.3591 2.3592 2.4024 2.4030 3.5119 3.5132 3.5134 3.6133 3.6104 4.0694 4.0708 4.0711 4.2071 4.2015 4.1638 4.1653 4.1655 4.3082 4.3021 4.1962 4.1978 4.1980 4.3430 4.3368 Table 2 pffiffiffiffiffiffiffiffiffiffiffi ¼ x ah2 q=E2 , laminate ([0°/90°/90°/0°]). Nondimensionalized fundamental frequencies of cross-ply laminated spherical shells, x a/h Method R/a 5 10 20 50 100 109 10 Present (13 13) Present (17 17) Present (21 21) HSDT [47] 12.0999 12.0995 12.0994 12.040 11.9378 11.9375 11.9375 11.840 11.8967 11.8964 11.8964 11.790 11.8851 11.8849 11.8849 11.780 11.8835 11.8832 11.8832 11.780 11.8829 11.8827 11.8827 11.780 100 Present (13 13) Present (17 17) Present (21 21) HSDT [47] 31.2175 31.2076 31.2063 31.100 20.5753 20.5690 20.5683 20.380 16.8713 16.8663 16.8658 16.630 15.6760 15.6714 15.6711 15.420 15.4977 15.4931 15.4929 15.230 15.4378 15.4333 15.4331 15.170 Table 3 pffiffiffiffiffiffiffiffiffiffiffi ¼ x ah2 q=E2 , laminate ([0°/90°/0°]). Nondimensionalized fundamental frequencies of cross-ply laminated spherical shells, x a/h Method R/a 5 10 20 50 100 109 10 Present (13 13) Present (17 17) Present (21 21) HSDT [47] 12.1258 12.1254 12.1253 12.060 11.9661 11.9658 11.9658 11.860 11.9256 11.9253 11.9253 11.810 11.9142 11.9140 11.9140 11.790 11.9126 11.9123 11.9123 11.790 11.9120 11.9112 11.9112 11.790 100 Present (13 13) Present (17 17) Present (21 21) HSDT [47] 31.1360 31.1262 31.1249 31.020 20.5441 20.5388 20.5381 20.350 16.8634 16.8584 16.8579 16.620 15.6764 15.6718 15.6714 15.420 15.4993 15.4948 15.4944 15.240 15.4398 15.4353 15.4349 15.170 and [0°/90°/90°/0°]. The shell is subjected to a sinusoidal vertical pressure of the form pz ¼ P sin px a sin py ¼ a with the origin of the coordinate system located at the lower left corner on the midplane and P the maximum load (at center of shell). The orthotropic material properties for each layer are given by E1 ¼ 25:0E2 ; G12 ¼ G13 ¼ 0:5E2 ; 3 ¼ w G23 ¼ 0:2E2 ; m12 ¼ 0:25 The in-plane displacements, the transverse displacements, the normal stresses and the in-plane and transverse shear stresses are presented in normalized form as 103 wða=2;a=2;0Þ h E2 Pa4 ryyða=2;a=2;h=4Þ h2 Pa 2 ; ; r xx ¼ sxz ¼ rxxða=2;a=2;h=2Þ h2 Pa2 sxzð0;a=2;0Þ h Pa ; ; sxy ¼ r yy sxyð0;0;h=2Þ h2 Pa2 The shell is simply supported on all edges. In Table 1, the static deflections for the present shell model are compared with results of Reddy shell formulation using first-order and third-order shear deformation theories [47]. Nodal grids with 13 13, 17 17, and 21 21 points are considered. Various values of R/a and two values of a/h (10 and 100) are taken for the analysis. Results are in good agreement for various a/h ratios with the higher-order results of Reddy [47]. Author's personal copy 1283 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 Table 4 pffiffiffiffiffiffiffiffiffiffiffi ¼ x ah2 q=E2 . Nondimensionalized fundamental frequencies of cross-ply cylindrical shells, x R/a Method [0/90/0] [0/90/90/0] a/h = 100 a/h = 10 a/h = 100 5 Present (13 13) Present (17 17) Present (21 21) FSDT [47] HSDT [47] 20.4988 20.4871 20.4856 20.332 20.330 11.9234 11.9230 11.9230 12.207 11.850 20.5310 20.5214 20.5202 20.361 20.360 11.9010 11.9007 11.9007 12.267 11.830 10 Present (13 13) Present (17 17) Present (21 21) FSDT [47] HSDT [47] 16.8448 16.8448 16.8441 16.625 16.620 11.9149 11.9146 11.9146 12.173 11.800 16.8598 16.8538 16.8531 16.634 16.630 11.8874 11.8872 11.8872 12.236 11.790 20 Present (13 13) Present (17 17) Present (21 21) FSDT [47] HSDT [47] 15.8048 15.7998 15.7993 15.556 15.55 11.9127 11.9125 11.9125 12.166 11.79 15.8055 15.8006 15.8001 15.559 15.55 11.8840 11.8838 11.8838 12.230 11.78 50 Present (13 13) Present (17 17) Present (21 21) FSDT [47] HSDT [47] 15.4988 15.4942 15.4938 15.244 15.24 11.9121 11.9119 11.9119 12.163 11.79 15.4972 15.4926 15.4922 15.245 15.23 11.8831 11.8829 11.8829 12.228 11.78 100 Present (13 13) Present (17 17) Present (21 21) FSDT [47] HSDT [47] 15.4546 15.4501 15.4497 15.198 15.19 11.9120 11.9118 11.9118 12.163 11.79 15.4527 15.4481 15.4477 15.199 15.19 11.8830 11.8827 11.8827 12.227 11.78 Plate Present (13 13) Present (17 17) Present (21 21) FSDT [47] HSDT [47] 15.4398 15.4353 15.4349 15.183 15.170 11.9120 11.9118 11.9118 12.162 11.790 15.4378 15.4333 15.4328 15.184 15.170 11.8829 11.8827 11.9927 12226 11.780 a/h = 10 5.2. Free vibration of spherical and cylindrical laminated shells eig = 33.239362338432 eig = 20.575318444535 1 y−coordinate y−coordinate 1 0.5 0 −0.5 −1 −1 0 0.5 0 −0.5 −1 −1 1 eig = 56.520391579289 1 eig = 60.338036781464 1 y−coordinate 1 0.5 0 −0.5 −1 −1 0 x−coordinate x−coordinate y−coordinate Nodal grids with 13 13, 17 17, and 21 21 points are considered. In Tables 2 and 3 the nondimensionalized natural frequencies from the present SSDT theory for various cross-ply spherical shells are compared with analytical solutions by Reddy and Liu [47], who considered both the First-order Shear Deformation Theory (FSDT) and the High-order Shear Deformation Theory (HSDT). The first-order theory overpredicts the fundamental natural frequencies of symmetric thick shells and symmetric shallow thin shells. The present radial basis function method is compared with analytical results by Reddy [47] and shows excellent agreement. Table 4 contain nondimensionalized natural frequencies obtained using the present SSDT theory for cross-ply cylindrical shells with lamination schemes [0/90/0], [0/90/90/0]. Present results are compared with analytical solutions by Reddy and Liu [47] who considered both the first-order (FSDT) and the third-order (HSDT) theories. The present radial basis function method is compared with analytical results by Reddy [47] and shows excellent agreement. In Fig. 4, the first four p vibrational modes of cross-ply laminated ffiffiffiffiffiffiffiffiffiffiffi ¼ x ah2 q=E2 , are illustrated for a laminate ([0°/ spherical shells, x 90°/90°/0°]), using a grid of 13 13 points, for a/h = 100, R/a = 10. The modes of vibration are quite stable. 0 x−coordinate 1 0.5 0 −0.5 −1 −1 0 1 x−coordinate 6. Concluding remarks Fig. 4. First four vibrational modes of cross-ply laminated spherical shells, pffiffiffiffiffiffiffiffiffiffi ffi ¼ x ah2 q=E2 , laminate ([0°/90°/90°/0°]) grid 13 13 points, a/h = 100,R/a = 10. x In this paper a sinusoidal shear deformation theory was implemented for the first time for laminated orthotropic elastic shells through a multiquadrics discretization of equations of motion and boundary conditions. The multiquadric radial basis function method for the solution of shell bending and free vibration prob- lems was presented. Results for static deformations and natural frequencies were obtained and compared with other sources. This meshless approach demonstrated that is very successful in the static deformations and free vibration analysis of laminated compos- Author's personal copy 1284 A.J.M. Ferreira et al. / Composites: Part B 42 (2011) 1276–1284 ite shells. Advantages of radial basis functions are absence of mesh, ease of discretization of boundary conditions and equations of equilibrium or motion and very easy coding. The static displacements and the natural frequencies obtained from present method are shown to be in excellent agreement with analytical solutions. Acknowledgements The support of Ministério da Ciência Tecnologia e do Ensino superior and Fundo Social Europeu (MCTES and FSE) under programs POPH-QREN are gratefully acknowledged. References [1] Koiter WT. On the foundations of the linear theory of thin elastic shell. Proc Kon Ned Akad Wetensch 1970;73:169–95. [2] Naghdi PM. A survey of recent progress in the theory of elastic shells. Appl Mech Rev 1956;9:365–8. [3] Carrera E. Developments, ideas, and evaluations based upon reissner’s mixed variational theorem in the modelling of multilayered plates and shells. Appl Mech Rev 2001;54:301–29. [4] Carrera E. Theories and finite elements for multilayered plates and shells: a unified compact formulation with numerical assessment and benchmarking. Arch Comput Methods Eng 2003;10:215–96. [5] Carrera E. On the use of the Murakami’s zig-zag function in the modeling of layered plates and shells. Comput Struct 2004;82:541–54. [6] Carrera E, Brischetto S. Analysis of thickness locking in classical, refined and mixed theories for layered shells. Compos Struct 2008;85:83–90. [7] Cinefra M, Belouettar S, Soave M, Carrera E. Variable kinematic models applied to free-vibration analysis of functionally graded material shells. Eur J Mech A/ Solids 2010;29:1078–87. [8] D’Ottavio M, Ballhause D, Kröplin B, Carrera E. Closed-form solutions for the free-vibration problem of multilayered piezoelectric shells. Comput Struct 2006;84:1506–18. [9] Touratier M. A generalization of shear deformation theories for axisymmetric multilayered shells. Int J Solids Struct 1992;29:1379–99. [10] Touratier M. An efficient standard plate theory. Int J Eng Sci 1991;29:901–16. [11] Touratier M. A refined theory of laminated shallow shells. Int J Solids Struct 1992;29:1401–15. [12] Vidal P, Polit O. A family of sinus finite elements for the analysis of rectangular laminated beams. Compos Struct 2008;84:56–72. [13] Cheng S. Elasticity theory of plates and a refined theory. J Appl Mech 1979;46:644–50. [14] Polit O, Touratier M. High order triangular sandwich plate finite element for linear and nonlinear analyses. Comput Methods Appl Mech Eng 2000;185:305–24. [15] Chapelle D, Bathe K-J. The finite element analysis of shells: fundamentals. Berlin: Springer; 2003. [16] Flügge W. Stresses in shells. 2nd ed. Berlin: Springer; 1960. [17] Scordelis A, Lo KS. Computer analysis in cylindrical shells. J Am Concr Inst 1964;61:561–93. [18] Reddy JN. Mechanics of laminated composite plates and shells. Theory and analysis. FL: CRC Press; 2003. [19] Carrera E. Theories and finite elements for multilayered plates and shells: a unified compact formulation with numerical assessment and benchmarking. Arch Comput Methods Eng 2003;10:215–96. [20] Pitkäranta J. The problem of membrane locking in finite element analysis of cylindrical shells. Numer Math 1992;61:523–42. [21] Chinosi C, Della Croce L, Scapolla T. Numerical results on the locking for cylindrical shells. Comput-Assist Mech Eng Sci J 1998;5(1):31–44. [22] Zienkiewicz 0C, Taylor RL, Too JM. Reduced integration techniques in general analysis of plates and shells. Int J Numer Methods Eng 1971;3:275–90. [23] Bathe K-J, Dvorkin E. A formulation of general shell elements – the use of mixed interpolation of tensorial components. Int J Numer Methods Eng 1986;22:697–722. [24] Arnold DN, Brezzi F. Locking free finite element methods for shells. Math Comput 1997;66:1–14. [25] Huang H-C. Membrane locking and assumed strain shell elements. Comput Struct 1987;27(5):671–7. [26] Kansa EJ. Multiquadrics – a scattered data approximation scheme with applications to computational fluid dynamics. I: Surface approximations and partial derivative estimates. Comput Math Appl 1990;19(8/9):127–45. [27] Hon YC, Lu MW, Xue WM, Zhu YM. Multiquadric method for the numerical solution of biphasic mixture model. Appl Math Comput 1997;88:153–75. [28] Hon YC, Cheung KF, Mao XZ, Kansa EJ. A multiquadric solution for the shallow water equation. ASCE J Hydraul Eng 1999;125(5):524–33. [29] Wang JG, Liu GR, Lin P. Numerical analysis of Biot’s consolidation process by radial point interpolation method. Int J Solids Struct 2002;39(6):1557–73. [30] Liu GR, Gu YT. A local radial point interpolation method (LRPIM) for free vibration analyses of 2-d solids. J Sound Vib 2001;246(1):29–46. [31] Liu GR, Wang JG. A point interpolation meshless method based on radial basis functions. Int J Numer Methods Eng 2002;54:1623–48. [32] Wang JG, Liu GR. On the optimal shape parameters of radial basis functions used for 2-d meshless methods. Comput Methods Appl Mech Eng 2002;191:2611–30. [33] Chen XL, Liu GR, Lim SP. An element free Galerkin method for the free vibration analysis of composite laminates of complicated shape. Compos Struct 2003;59:279–89. [34] Dai KY, Liu GR, Lim SP, Chen XL. An element free Galerkin method for static and free vibration analysis of shear-deformable laminated composite plates. J Sound Vib 2004;269:633–52. [35] Liu GR, Chen XL. Buckling of symmetrically laminated composite plates using the element-free Galerkin method. Int J Struct Stab Dyn 2002;2:281–94. [36] Liew KM, Chen XL, Reddy JN. Mesh-free radial basis function method for buckling analysis of non-uniformity loaded arbitrarily shaped shear deformable plates. Comput Methods Appl Mech Eng 2004;193:205–25. [37] Q Huang Y, Li QS. Bending and buckling analysis of antisymmetric laminates using the moving least square differential quadrature method. Comput Methods Appl Mech Eng 2004;193:3471–92. [38] Liu L, Liu GR, Tan VCB. Element free method for static and free vibration analysis of spatial thin shell structures. Comput Methods Appl Mech Eng 2002;191:5923–42. [39] Xiang S, Wang KM, Ai YT, Sha YD, Shi H. Analysis of isotropic, sandwich and laminated plates by a meshless method and various shear deformation theories. Compos Struct 2009;91(1):31–7. [40] Xiang S, Shi H, Wang KM, Ai YT, Sha YD. Thin plate spline radial basis functions for vibration analysis of clamped laminated composite plates. Eur J Mech A/ Solids 2010;29:844–50. [41] Ferreira AJA, Roque CMC, Jorge RMN. Analysis of composite and sandwich plate by trigonometric layer-wise deformation theory and radial basis function. J Sandwich Struct Mater 2006;8:497–515. [42] Ferreira AJM. A formulation of the multiquadric radial basis function method for the analysis of laminated composite plates. Compos Struct 2003;59:385–92. [43] Ferreira AJM. Thick composite beam analysis using a global meshless approximation based on radial basis functions. Mech Adv Mater Struct 2003;10:271–84. [44] Ferreira AJM, Roque CMC, Martins PALS. Analysis of composite plates using higher-order shear deformation theory and a finite point formulation based on the multiquadric radial basis function method. Composites: Part B 2003;34:627–36. [45] Hardy RL. Multiquadric equations of topography and other irregular surfaces. Geophys Res 1971;176:1905–15. [46] Ferreira AJM, Fasshauer GE. Computation of natural frequencies of shear deformable beams and plates by a RBF-pseudospectral method. Comput Methods Appl Mech Eng 2006;196:134–46. [47] Reddy JN, Liu CF. A higher-order shear deformation theory of laminated elastic shells. Int J Eng Sci 1985;23:319–30.