Lightfield Imaging and its Application in Microscopy
advertisement

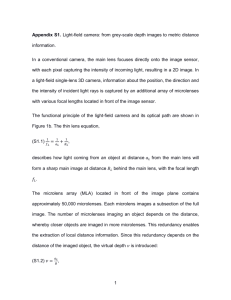
Lightfield Imaging and its Application in Microscopy Michael Bayer Advisors: Grover Swartzlander and Jinwei Gu Chester F. Carlson Center for Imaging Science Rochester Institute of Technology Rochester, New York 14623 I. A BSTRACT In conventional photography the focus of the camera must be adjusted to ensure each captured image is in focus. This is a result of all the light rays that reach an individual pixel being summed. From integral photography the concept of lightfield imaging was developed. With lightfield imaging, the light ray field is sampled based on angle of incidence. This system provides the user with the ability to refocus images after the instance of exposure and to view a scene from various viewpoints bounded by the main lens aperture. [1] This technology was used to build a prototype lightfield microscope. A possible use for this prototype is monitoring the trajectory of microscopic objects without the need for periodic refocusing. II. S TRUCTURE AND S CIENCE OF A L IGHTFIELD C AMERA Fig. 1: Traditional plenoptic camera. The main lens is focused onto the microlens array (f2) and the microlens array is focused onto the imaging sensor (f1). The lightfield camera system seen in figure 1 consists of a main lens which can be a generalization of a series of lenses, a microlens array, and an image sensor. As light enters the system, the main lens focuses the light onto the microlens array. For a fixed main lens system, the focal length of the main lens is the distance to the microlens array. As a result, a portion of a scene at an effective infinity will focus onto the microlens array. The microlenses are focused on the principal plane of the main lens. These lenses are small compared to the main lens and therefore, the main lens is effectively at infinity from their view point. The image focused onto the microlens array is focused onto the image sensor, being located at the focal length distance of the microlens array. A microlens should be thought of as an output image pixel, and a photosensor pixel value should be thought of as one of the many light rays that contribute to that output image pixel. [5] All light entering the camera can be characterized by its radiance passing through the main lens and microlens array. The convention used to describe this radiance in equation 1 is L(u,v,s,t). The (u,v) coordinates represent a position on the main lens and (s,t) are positions, or samples, of the lightfield passing through the microlenses. The (s,t) plane is sampled via an imaging sensor, i.e., the central pixel under each microlens. For a visualization of these planes see figure 1. Considering only the rays of light that pass through a single (u,v) coordinate is akin to a pinhole camera. By holding a constant ”point” on the main lens, the aperture effectively shrinks to the (u,v) point on the main lens. The irradiance reaching the sensor at microlens position (s,t) is the weighted integral of the total radiance passing through the system at a point on the main lens and at a corresponding point on the microlens array. Z Z 1 EF (s, t) = 2 LF (u, v, s, t)dudv (1) F Note: In equation 1 there is an optical vignetting term, cos4 (θ), that has been removed for improved clarity, where theta is the angle between the light ray, (u,v,s,t), and the sensor plane normal. For paraxial approximations this term can be ignored all together. From lightfield imaging theory, there are three basic concepts that should be understood. 1) The light rays incident on each microlens are sampled according to their angle of incidence. If the separation between the microlenses and the imaging sensor de- creased to zero, the lightfield camera would essentially transform into a conventional camera. 2) Differing viewpoints of the scene are captured by synthetically shrinking the main lens aperture to a certain (u,v) coordinate. 3) Differing viewpoints also provide parallax information and a sense of depth in a scene. [5] III. I MAGE E XTRACTION (S UB -A PERTURE I MAGES ) Once a lightfield is captured, macroscopically, it will appear to be a traditional photograph taken with a certain focus, such as would be the case with a conventional camera. Figure 2 is an example of this image. This is because under each microlens, a tiny image of the lightfield arriving at each microlens is captured. In the large scale these tiny images appear to create the scene being imaged. Fig. 2: A raw lightfield image has the appearance of being a traditional photograph when viewed macroscopically. When the image of the raw lightfield is magnified, it is clear that the image is composed of many small circular regions. These are the regions beneath each microlens in the system and are the images of the lightfield reaching each microlens. A magnified view is shown in figure 3. Each circular area in this image is the area of the sensor under each microlens. One such area can be seen highlighted by a red circle. Fig. 3: A magnified region from figure 2. Notice the circular regions. These are the areas of the microlenses, focused onto the sensor. Considering equation 1, if (u,v) is held constant, by selecting the same pixel coordinate under each microlens, as is the case in figure 4, a pseudo-pinhole camera situation is created and a sub-aperture image can be extracted. What is meant by the same pixel under each microlens is that each microlens has a specific number of (s,t) coordinates. In figure 4, there is a five pixel diameter and so there will 2 be approximately π 25 , or approximately 20 individual (s,t) coordinates under each microlens. This also corresponds to the number of different sub-aperture images that can be extracted. In this case there will be 20 extracted images, or 20 individual (u,v) coordinates. Increasing sensor pixel dimensions, or megapixels, provides a denser population of (u,v) positions. It may be beneficial to consider a single microlens as a representation of the main lens. The number of pixels beneath each microlens is the number of sub-aperture images that can be extracted. Increasing the number of pixels thus increases the number of these images. Varying the pixel coordinates (s,t) across the entire array extracts an image that would have resulted had a conventional image been taken with the sub-aperture as the new aperture for the system. This light is focused onto the microlens array at a specific perspective, depending on the location of the subaperture. [4] For example, the central coordinate (s,t) = (0,0), is extracted across every microlens in the image. This will isolate the light rays that passed through the main lens at its central region. A coordinate that is off-center will extract a sub-aperture image that is from a main lens synthetic aperture that is off-center. (See figure 6) By extracting these coordinates periodically across the microlens array, the light field is being sampled. The samples in question are rays that passed through a subset of the full aperture (u,v) plane of the main lens. Fig. 4: An example of the pixel layout beneath a single microlens. Taking coordinate (1,0) in this case, and extending this coordinate across all microlenses, extracts a sub-aperture image. This provides a system that records different perspectives of (a) Pencil in the foreground is in focus. (b) The middle pencil is in focus. Fig. 5: An example of digital refocusing applied to an image of three pencils at varying distances from the lightfield camera. the same scene. Figure 6 is an example of what occurs when (u,v) is held constant and (s,t) is varied across all microlenses. In the case of figure 6, a sub-aperture image, or viewpoint from a specific (u,v) coordinate was extracted from a top and bottom pixel across all microlenses. By doing this, the original aperture across the main lens was reduced to isolate the rays that created these two perspectives. Fig. 6: Two sub-aperture photographs obtained from a light field by extracting the shown pixel under each microlens (depicted on left). Note that the images are not the same, but exhibit vertical parallax. Image credit from references [4] and [5]. IV. D IGITAL R EFOCUSING The title of this section is meant to hint at the nature of this refocusing method. For a standard camera, a physical adjustment to the focus must be made for a proper image to be acquired. Using a lightfield imaging system the need to physically change the focus between each exposure is removed. Instead, after the image is taken, using a computer and software, the focus can be altered. Extending equation 1 to a synthetic coordinate (s’,t’), or a plane of focus that is before or after the original plane of focus distance, F, results in equation 2. 1 1 LF u(1 − ), v(1 − ), u0 , v 0 dudv α α (2) The alpha term is the depth of the virtual film plane relative to F, and E(αF ) is the photograph formed at the virtual film plane at a depth of (αF ). [5] Extending the focal length or compressing it will alter the overall focus of the image and refocus to the new virtual plane. From equation 2, refocusing to a virtual plane is accomplished by shifting and adding multiple sub-aperture images where the amount of shifting that is required follows equation 3. The amount of shift increases with the distance the sub-aperture image is from the central sub-aperture image. EαF (s0 , t0 ) = 1 α2 F 2 Z Z 1 1 shif t(horizontal, vertical) = u(1 − ), v(1 − ) (3) α α This amount of shift is applied depending on the (u,v) coordinate of each sub-aperture image. The degree of shifting that occurs is dependent on the alpha value chosen. This is also scaled by the (u,v) coordinate of the sub-aperture image being shifted. Equation 4 is a more intuitive form of the continuous function from equation 2. For a finite number of sub-aperture images, refocusing is a summation of the shifted versions of each individual sub-aperture image. n m 1 XX 1 0 0 1 EαF (s , t ) = Iu,v u(1 − ), v(1 − , u , v ) α2 F 2 u v α α (4) When referencing an (s,t) coordinate or its synthetic counterpart it is important to again mention that this is the coordinate taken under each microlens in the image. 0 0 These concepts were applied to the images in figure 5. Using the process of digital refocusing two separate planes of focus could be extracted from a single image. Figure 5a focuses on the pencil in the foreground whereas figure 5b is the same image, but the focus has been moved further from the camera to the second pencil by varying the alpha value. These two images were acquired from one image and one original focus. V. L IGHTFIELD M ICROSCOPY The Lightfield Imaging System that has been discussed to this point has been implemented in a camera setup, or a point and shoot system for everyday imaging. This technology can be integrated into other systems such as in the field of microscopy. It is possible to create a lightfield microscope. In doing this, one can apply the advantages of lightfield imaging to microscopy. There are two rules that govern a lightfield microscope’s construction. 1.The microlens array must be positioned at the intermediate image plane. 2. The back focal plane of the microlenses must be imaged to capture the lightfield. A standard microscope can be converted into a lightfield microscope by removing the eyepiece, replacing it with a microlens array, and positioning a sensor at the back focal plane of the microlens array. A ray diagram for this situation is found in figure 7. For ease of assembly, the back focal plane of the microlens array can be imaged using a relay, or 1:1 macro lens. A custom camera would need to be made in order to place the camera sensor at fIm as this number is on the order of a few millimeters. Fig. 7: Ray diagram of a lightfield microscope setup. Focal length 1 is the objective’s focal length, 2 is the tube length (generally 160 [mm]), and Focal length Im is the distance to the back focal plane of the microlens array. Figure 7 is the ray diagram for a non-infinity corrected microscope. For further information and additional ray diagrams for the infinity corrected objectives case refer to Levoy’s paper, ”Optical Recipes for Lightfield Microscopes.” [2] To ensure that the positioning of each component is correct, equation 5 should be applied, where f3 is the focal length of the microlens array. Notice that the position of the sensor behind the microlens array is slightly greater than the true focal length. fIm = 1 f2 1 − 1 f3 (5) VI. M ICROLENS AND O BJECTIVE PAIRING The resolving power of a multi-lens optical system is governed by the smallest numerical aperture (NA) among its lenses. [3] Referring to figure 8, if the main lens’ f number is larger than the microlenses’ f number, an inadequate use of sensor area results. When the opposite is true and the microlenses’ f number is larger than the main lens’ f number, overlapping occurs, reducing the usable area on the sensor again. N2 = f3 pitch (7) N1 and N2 should be equal to ensure that the system uses the maximum sensor area possible rather than having overlap or unused area. VII. R ESOLUTION L IMITS OF THE L IGHTFIELD S YSTEM Recalling figure 1, the imaging plane in the camera system is located at the microlens array plane. Each microlens consolidates the light incident at a given angle to a single pixel. Due to this fact, the number of microlenses in a lightfield system determines the maximum pixel dimensions that can be extracted for each sub-aperture image. A term that can be used for each microlens is a super-pixel. The number of super-pixels governs spatial resolution because multiple pixels are being imaged beneath each microlens. The pixel density of the sensor also can limit the system. In figure 4 the maximum number of sub-aperture images, or images from specific perspectives was limited by the number of sensor pixels beneath each microlens. Therefore, the pixel density of the sensor determines the angular resolution of the system. More pixels beneath a microlens will provide finer discrimination of perspectives and there will be a greater lightfield sampling. Fig. 8: An illustration of matched and mismatched microlens and main lens f numbers. Image credit from references [3] and [5]. This is the reason for matching the f numbers of the objective, which is the main lens for a microscope setup, and the microlens array. Without proper matching, the quality of the system will be degraded. Equation 6 expresses the f number for an objective as a function of the magnification and numerical aperture, where M is the magnification, NA is the numerical aperture of the objective, and N is the resulting f number. M N1 = (6) 2N A To find the f number of the microlens array, equation 7 divides the focal length of the microlens array, defined as f3 earlier, by the pitch, which in this case is the aperture size of the microlenses. In other words, the spatial resolution is controlled by the number of microlenses (Ns ∗ Nt ) and angular resolution is determined by the number of resolvable samples behind each microlens, or (Nu ∗ Nv ). The total resolution for a lightfield system can be written as Ns ∗ Nt ∗ Nu ∗ Nv . In microscopy the total resolution is limited by the number of resolvable sample spots in the specimen. The number of resolvable spots is also the number of pixels beneath each microlens, or (Nu ∗ Nv ). This criterion is known as the Sparrow limit and is defined as the smallest spacing between two points on the specimen such that intensity along a line connecting their centers in the image barely shows a measurable dip. [3] On the intermediate image plane the Sparrow limit can be expressed as 0.47λ M (8) NA where λ is the wavelength of light, NA is the numerical aperture of the objective, M is the magnification, and Robj is the smallest spacing distance. Based on the balance between spatial and angular resolution, equation 9 provides an upper limit on the number of measurable spots for a system. Robj = Nu ∗ Nv = W ∗H Robj (9) Another limiting factor is axial resolution, or depth of field. This is the ability to refocus to features at varying depths in a sample. For a microscope the total depth of field is a combination of both the standard depth of field derived from geometrical optics alone and an additional term to take into account the wave optics of the microscope. This is given by n λn + e (10) 2 NA M ∗ NA where e is the spacing between samples in the image and n is the immersion medium’s index of refraction. [3] In the case of high NA microscope objectives oil immersion may be necessary, therefore n would be the index of the oil used. In most cases the index will be 1.0 (air) because immersion is not necessary for low magnifications. Dtot = Dwave + Dgeometric = For a microscope with Nu = Nv , which is the case for circular or square microlenses, equation 10 is dominated by the geometrical term and becomes (2 + Nu )λn 2N A2 VIII. E XPERIMENTAL S ETUP Dtot = (11) Using the microscope concepts outlined in the previous section, a lightfield microscope was constructed in figure 9 above. In our prototype lightfield microscope, a Thorlabs 150 [µm] pitch, 5200 [µm] focal length, 10x10 [mm] microlens array was used. The available objective that paired best with the microlens array was 30x, 0.35NA. The f number of the microlens array is 35 and the objective’s f number is 43. These are not perfectly paired and follow the limitations in figure 8. From the Sparrow limit in equation 8, at 535 [nm], Robj =21.6 [µm]. The maximum number of resolvable spots for a full frame, 36x24 [mm] sensor was (1600x1110), from equation 9. With the microlens used in this setup having a pitch of 150 [µm], the sub-aperture images have a maximum pixel amount equal to 288x192 pixels. For symmetrical microlenses, Nu =Nv = # of resolvable spots per microlens. This is given by the microlens pitch divided by Robj , which equals 6.94 resolvable spots per microlens. This number specifies the angular resolution of this system. In object space the lateral resolution is given by the microlens pitch divided by the magnification of the objective, which is 150 [µm] / 30x. This produces a lateral resolution on the sample of 5 [µm]. Considering the axial resolution from equation 11, the total depth of focus for this system is 19.5 [µm]. These results were found assuming that we have a microlens array that has a WxH that fills the sensor of the camera, i.e. 36x24 [mm]. Recalling the specification for the prototype lightfield microscope being discussed, the available microlens array is 10x10 [mm]. This reduces total number of resolvable spots and the maximum sub-aperture image resolution. These results are summarized in table I. TABLE I: Resolution factors calculated for an optimum, full frame microlens array, and for the microlens array used in the prototype lightfield microscope. This microlens array measures 10x10 [mm] with 150 [µm] pitch. The wavelength of light used throughout was green light at λ=535 [nm]. Factors Robj Nu total Nu per microlens Sub-Aperture Dimensions Angular Resolution Lateral Resolution Axial Resolution 30x/0.35NA, full fram microlens array 21.6 [µm] 1670x1110 [spots] 6.94 [spots/microlens] 240x160 [pixels] 6.94 [spots/microlens] 30x/0.35NA, 10x10 [mm] microlens array 21.6 µm] 463x463 [spots] 6.94 [spots/microlens] 67x67 [pixels] 5 [µm] 6.94 [spots/microlens] 5 [µm] 19.5 [µm] 19.5 [µm] For an illumination source, a fiberoptic light source was directed into a condenser setup. The illumination source was calibrated for Köhler illumination for a uniform angular distribution of light rays. Fig. 9: The prototype lightfield microscope developed using the theory outlined in this paper. (a) Near Focus (a) Far left perspective. (b) Mid-Range Focus (b) Far right perspective Fig. 11: These are two sub-aperture images that show an example of parallax. The circled regions are emphasized to show that these regions move behind the objects in the foreground. This is the concept of parallax that is impossible to achieve with a standard microscope. Fig. 10: An example of focusing at various depths using the prototype lightfield microscope. The sample is made up of semi-translucent spheres suspended in liquid. Using the theory from the section VII a comparison of angular resolution, sub-aperture pixel amount, and axial resolution versus microlens pitch is found in figure 12, 13, and 14. These results were all calculated based on the experimental setup using a 30x, 0.35 NA objective, and assuming a wavelength of light equal to 535 [nm]. For each plot a red box signifies the capabilities of the prototype lightfield microscope. Using the prototype lightfield microscope outlined above, figure 10 shows the resulting refocused imagery for semitranslucent spheres suspended in liquid. From figure 10a to 10c, the focus is changed from a near focus to a far focus. Also, from the extracted sub-apertures images parallax was also seen. With a standard microscope parallax is impossible to achieve. This is because a standard microscope is orthographic, meaning it produce different perspectives of a sample. Also, translating the stage in the x and y directions does not produce parallax. The technology presented in this paper and seen in the results of the prototype lightfield microscope produce images that do exhibit parallax and do allow for the extraction of perspectives. Figure 11 presents two sub-aperture images that show parallax. The circled regions in figures 11a and 11b are emphasized to show the viewer that parallax is occurring. Fig. 12: Angular resolution versus microlens pitch for different objects, assuming green light. (c) Far Focus consideration is matching the f number of the objective with the microlens array. In this prototype the microlens array could only approximately match with the 30x objective being used. X. C ONCLUSION AND F UTURE W ORK Fig. 13: Output pixel amount versus microlens pitch for different objects, assuming green light. This curve is not dependent on the objective and therefore only one curve is plotted. Using the theory outlined in this paper and its references, a prototype lightfield microscope was constructed. This microscope successfully captured lightfield images of various samples, providing imagery that can be refocused to different depths, exhibit multiple viewpoints, and show parallax, which is impossible with a standard microscope. The focus for future work with this prototype microscope is to be able to measure the trajectory and orientation of a moving, microscopic object. To do this, an increase in lateral resolution and an increase in axial resolution is needed as the microscopic objects in question approximately equal the current lateral resolution. With improvemts, I believe this technology can be used to map trajectory and orientation of a moving object. XI. ACKNOWLEDGEMENTS I would like to thank Dr. Grover Swartzlander and Dr. Jinwei Gu for their assistance and advisement throughout this process. I would also like to thank Xiaopeng Peng for her help throughout the project. Her skills proved invaluable. Fig. 14: Axial resolution versus microlens pitch for different objects, assuming green light. To summarize, as microlens pitch increases, angular resolution increases, sub-aperture image resolution decreases, and axial resolution increases. There is a constant balance that must be considered when constructing a lightfield microscope. To increase the capabilities in one area may also reduce the capabilities in another. IX. P OSSIBLE I MPROVEMENTS This prototype lightfield microscope can be further optimized based on the results found in table I. There are improvements that have the potential to result in a significant gain in output image resolution and refocusing quality. In my opinion, the most important gain to be made is to obtain a custom manufactured microlens array that is better suited for the prototype setup. The 10X10 [mm] microlens array fills only a fraction of the camera’s field of view and results with a sub-aperture spatial resolution of only 67x67, not counting the microlenses that are obstructed by the mechanism holding the array. This wastes sensor area and reduces the field of view and output spatial resolution of the system. Another R EFERENCES [1] J. Wang E. Adelson. Single lens stereo with a plenoptic camera. IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2), February 1992. [2] M. Levoy. Optical recipes for lightfield microscopes. Technical memo, Stanford University, 2006. [3] R. Adams A. Footer M. Horowitz M. Levoy, M. Ng. Light field microscopy. ACM Transactions on Graphics, 25, 2006. [4] M. Bredif M. Duval G. Horowitz M. Hanrahan P. Ng, R. Levoy. Light field photography with a hand-held plenoptic camera. Technical report, Stanford University, 2005. [5] R. Ng. Digital Light Field Photography. PhD thesis, Stanford University, July 2006.