Solutions - Olin College
advertisement

Franklin W. Olin College of Engineering
Needham, Massachusetts
Electrical and Computer Engineering
ENGR2410 – Signals and Systems
Problem Set 8
Posted Saturday, April 4
Due Thursday, April 9 in class
Problem 1: Design a bandpass filter using a single opamp. Use both the Sallen-Key
and multiple feedback architectures. For each architecture, explore the range of filters that
you can obtain. What are the relative advantages of each? Show at least two examples of
each architecture. For each example, use Matlab to show the Bode plot, step response and
pole-zero map. The links below can help you get started, but feel free to use any others.
Remember to indicate clearly which source(s) you use.
• http://www.analog.com/Wizard/filter/detail_filter_help.pdf\#multiple
• http://www.analog.com/en/design-tools/dt-adisim-design-sim-tool/design
-center/dt-adisim-design-sim-tool/Filter_Wizard/resources/fca.html
• http://www.maxim-ic.com/appnotes.cfm/an_pk/1762
Solution
All second order filters can be characterized by their gain (G), quality factor (Q), and
center frequency (ω0 ). These factors fit into the transfer function as follows.
G ωQ0 s
H(s) =
2
s + ωQ0 s + ω02
G
=
s+
ω0
2Q
+
r
ω0
2Q
2
ω0
Q
s
!
− ω02
s+
ω0
2Q
−
r
ω0
2Q
2
!
− ω02
Before we go onto Sallen-Key and Multiple Feedback topologies, let’s remind ourselves
how changing Q and ω0 changes Bode plots, step responses, and pole-zero maps.
2
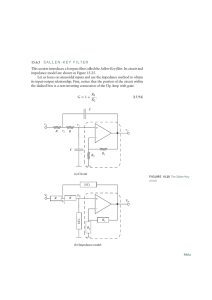
We know intuitively that changing ω0 changes the center of the high-gain region of a
band-pass filter. As we see, changing Q can also change the way the gain is shaped in that
area, and how sharp the drop-off is in phase change. This in turn changes the oscillations of
the step response, etc.
Cool! Now we know how theoretically we want to control these things; what’s more
interesting now is how different circuits manage to handle this.
The Sallen-Key circuit diagram:
3
Note that in www.analog.com, the version of Sallen-Key bandpass has the capacitors
reversed. According to the great Kent Lundberg, this is wrong. Instead, we will refer to
Kendall Su’s book, where the parameters are controlled as follows:
r
ω0 =
Q =
G =
R1 + R2
R1 R2 R3 C1 C2
ω0
1
1
+ R3 C2 + R31C1 +
R 1 C1
1−µ
R2 C1
µ
R1 C1
1
R 1 C1
+
1
R3 C2
+
1
R 3 C1
+
1−µ
R2 C1
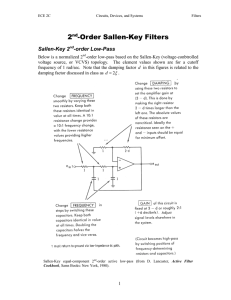
By iterating through some possibilities, we can generate some cool plots. The following
plots hold default values of R1 = R2 = R3 = C1 = C2 = µ = 1, with changed values specified
in the legend or title.
4
5
Against common perception, as you can see, it is possible for Sallen-Key to achieve all
sorts of crazy conformations, but it is not a very exact science. There are a lot of advantages
to using Sallen-Key, but in general, the filter is not easily tuned.
For multiple feedback filters, the topology is:
where the transfer function parameters are defined as follows:
6
ω0 = √
1
R1 R2 C1 C2
q
Q = q
G =
R2
R1
C2
C1
+
q
C1
C2
R2 C1
R1 (C1 + C2 )
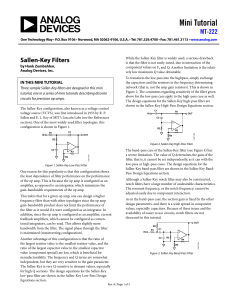
Again, let’s mess with the parameters. Again, the default parameters in these plots are
R1 = R2 = C1 = C2 = 1, unless otherwise indicated by the legend or title.
7
8
Comments about both filters (via Boris)
They are both configurable by component choices. If you choose in a way that you get
the same parameters (Q , center frequency and gain), they will work the same way.
• The Sallen-Key has the advantage of having a specific gain that provides a more easily
accessible knob for changing Q and gain.
• For the Sallen-Key topology, all 3 parameters are interdependent.
• For the MFB topology, it is possible to set the center frequency and Q independently.
• The gain is set by this choice, but can then be reduced with an additional resistor.
• Q can be set to infinity (easily for the Sallen-Key), but, in real life, wont get there due
to components not being exactly their advertised values.
• Sallen-Key uses a particular gain.
• Since this gain is assumed to be exact, this topology is sensitive to changes in the gain.
9
• MFB assumes infinite gain given a large op-amp gain, it is insensitive to variation in
the op-amp gain.
• For a Sallen-Key with a gain of 1, it is less sensitive to component values than the
MFB topology; however only small Qs can be achieved.
• For a Sallen-key with non-unity gain (higher Q), it can be more sensitive to component
values than the MFB topology.
• For MFB filters, large Q comes at the cost of large component spread.
Problem 2: You are asked to stabilize the system
H(s) =
s2
1
− 0.01s + 1
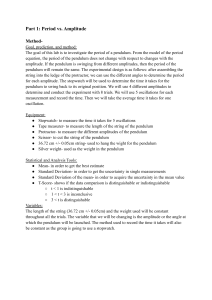
A. Plot the step response and pole-zero map of this system using Matlab.
Solution
10
Note that the poles in the system lie in the right-hand plane of the pole-zero map–hence
the system’s instability.
B. Use the pole-zero map to show the effect of using proportional control on this system.
Show the step response of at least two feedback gains to illustrate. Can you stabilize
the system?
Solution
From ModCon, we remember how a simple proportional control system works:
To find the transfer function of this system, we use Black’s equation:
11
HX
HX + 1
X = Kp
Kp H
G =
Kp H + 1
G =
=
=
Kp
s2 −0.01s+1
Kp
+
s2 −0.01s+1
s2
1
Kp
− 0.01s + 1 + Kp
Again, using our fun MatLab friends, we’ll do some analysis for Kp = .0001 and
Kp = 1000.
12
These are some samples of some possible plots. What’s important to note here is that
no matter how we try, we can’t get those poles to go to the left of the y-axis, and
therefore can never achieve stability. In fact, if we just go through with the quadratic
equation, we can find the poles:
sp
r
0.012
0.01
±
− (1 + kp )2
=
2
4
≈ 0.005 ± j|1 + kp |
Given kp > 0, R{sp } = 0.005 And no matter what, 0.005 > 0
C. Repeat part B using integral control.
Solution
Now, we’re looking at this system:
13
and we again find the transfer function using Black’s Formula:
HX
HX + 1
Ki
X =
s
G =
G =
=
=
HKi
s
Ki H
+
s
1
Ki
s(s2 −0.01s+1)
Ki
+
s(s2 −0.01s+1)
s3
1
Ki
− 0.01s2 + s + Ki
Let’s plot some MATLab:
14
Again, there really doesn’t seem to be a way to stabilize the system. If you keep trying
different values, you’ll again notice that the poles never move to the left of the y-axis,
so again, no chance for stability.
D. Repeat part B using differential (or derivative) control.
Solution
New block diagram:
Transfer function via Black’s:
15
HX
HX + 1
X = sKd
sKd H
G =
sKd H + 1
G =
=
sKd
s2 −0.01s+1
sKd
+
s2 −0.01s+1
1
sKd
− 0.01s + 1 + sKd
sKd
= 2
s + (Kd − 0.01)s + 1
=
s2
MatLab fun:
16
Hey, cool! In this case, we can stabilize the system! Let’s do some quick quadratic fun
to find the poles:
sp
r
(Kd − 0.01)2
0.01 − Kd
=
±
− 12
2
4
r
0.01 − Kd
(Kd − 0.01)2
±
−1
=
2
4
For Kd > 0.01, R{sp } < 0, finally allowing some stability! Let’s actually look at this
special case:
17
Interesting! When the poles are exactly on the y-axis, the system neither converges
nor diverges! How cool!
18