as a PDF
advertisement

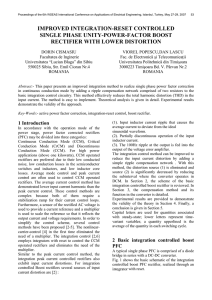
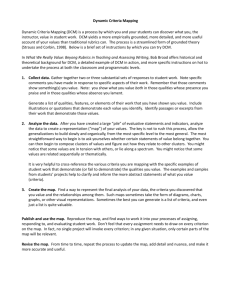
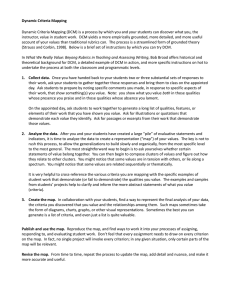
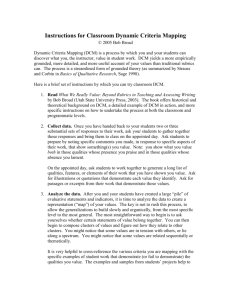
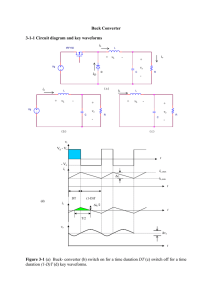
1 of 6 AN IMPROVED INTEGRATION-RESET CONTROLLED SINGLE PHASE UNITY-POWER-FACTOR BOOST RECTIFIER WITH LOWER DISTORTION Chongming Qiao and Keyue M. Smedley Department of Electrical and Computer Engineering University of California, Irvine, CA 92697 Tel: (949) 824-6710 Fax: (949)824-3203 E-mail: Smedley@uci.edu Abstract: This paper proposes an improved integration method to realize single phase power factor correction in continuous conduction mode by adding a ripple compensation network comprised of two resistors to the basic integration control circuitry. This method effectively reduces the total harmonic distortion (THD) in the input current. The proposed method is easy to implement. Theoretical analysis is given in detail. Experimental results demonstrate the validity of the approach. This method is very suitable for IC fabrication. 1 Introduction In accordance with the operation mode of the power stage, power factor corrected rectifiers (PFC) may be divided into three categories: Continuous Conduction Mode (CCM), Critical Conduction Mode (CrCM) and Discontinuous Conduction Mode (CCM). For high power applications (above one kilowatts), CCM operated rectifiers are preferred due to their low conducted noise, low conduction losses in the semiconductor switches and inductors, and low inductor core losses. Average mode control and peak current control are often used to control CCM operated rectifiers. The average current control method has demonstrated lower input current harmonic than the peak current control. Unfortunately, both of these control methods are complex because both of them require a stabilization ramp for their current control loops. Furthermore, a sensor of the rectified AC voltage is used to provide a current reference and a multiplier is used to scale the reference so that it reflects the output current and voltage requirements. In order to simplify the control scheme, several control methods have been proposed [1-4]. The nonlinear-carrier-control [3] in the first time eliminated the need of a multiplier. The integration control [1,5] generalized constant frequency power factor correctors with a unified integrator-based PWM controller for any boostrelated converters. This control method employs Zheren Lai and Mehmet Nabant Linfinity Microelectronics Inc. 11861 Western Ave. Garden Grove, CA 92841 Tel: (714) 898-8121 Fax: (714) 893-2579 Email: Zheren@linfinity.com integrators with reset to control the CCM operated rectifiers and eliminates the need of the multiplier. Similar to the peak current control method, the integration peak current controlled rectifiers also exhibit input current distortions. For integration controlled Boost rectifiers (in this paper the trailing-edge modulation peak inductor current controlled boost rectifier [1] is used for investigation), several sources of input current distortion are listed as follows: (1). Input inductor current ripple that causes the average current to deviate from the ideal sinusoidal waveform. (2). Partially discontinuous operation of the input inductor current. (3). The 120Hz ripple at the output is fed into the output of the voltage error amplifier. In this paper, an improved control method is proposed to reduce the input current distortion by adding a simple ripple compensation network to the integration control method. With this method, the distortion source (1) is eliminated and source (2) is significantly decreased by reducing the subinterval where the converter operates in DCM. In the following discussion, this proposed control method is called improved integration control while the integration control without compensation is referred as the basic integration control. In Section 2, the scheme of the basic integration controlled boost rectifier is reviewed. In Section 3, the proposed compensation method and its function in the converter is detailed. Experimental results are provided to demonstrate the validity of the theory in Section 4. Finally, a conclusion is given in Section 5. Notation conventions are as follows: Capital letters are used for quantities associated with steady-state unless indicated explicitly; lower letters represent time-variant variables; a quantities in a pair of angular-brackets is the local-average of the quantity, i.e. the average in each switching cycle. 2 of 6 2 Review of the basic integration controlled boost PFC A typical single phase PFC is comprised of a diode bridge in series with a DC-DC converter. Fig. 1 shows the schematic of the integration controlled boost PFC rectifier with an additional compensation network comprised of R1 and R2. Without this compensation network, the control method realized through an integrator with reset is the basic integration control. For PFC applications, the control goal of the DCDC converter is ig = Vg --------------------(1) Re where Re is the emulated resistance. Vg and ig are the input voltage and current of the DC-DC converter respectively( see Fig. 1). ig L Vo C Rs R O Int I w/reset Vm AV(s) Vref CLK Fig. 1. The schematic of the improved integration controlled boost PFC rectifier During the quasi-steady state, a DC-DC converter satisfies the following equation Vo = M (D) ---------------(2) Vg where M(D) is the conversion ratio of the DC-DC converter. Combination of equation (1) and (2) leads to the general PFC control function Vm --------(3) M (D) R ⋅V where Vm = s o and Rs is the equivalent Re Rs ⋅ i g = current sensing resistance. For boost converter, the conversion ratio is M ( D) = 1 . The general PFC control 1− D function becomes Rs ⋅ i g = Vm ⋅ (1 − D) -------(4) current is sensed for the control. The equation (4) can be reorganized as Rs ⋅ i Lpk = Vm − Vm ⋅ D --------(5) In Fig.1, excluding the compensation network R1 and R2, the above equation is achieved as follows: Vm − Rs ⋅ i Lpk = Vm ⋅ D ⋅ T -----------(6) τ where τ is the integration time constant; Vm is the output of the voltage loop error amplifier and T is the switching period. By setting τ = T , the equation (6) will be the same as the equation (5). With this peak current control, input peak current is proportional to the input voltage that is given by Vm ⋅ Vg --------(7) Rs ⋅Vo The following conclusion: is drawn from the above analysis: First, when the current ripple is small enough comparing with average current, the peak current approximately equals the average current, the control goal of PFC (see equation (1)) is achieved. However, when the input current is smaller, the current ripple will cause larger distortion. The average inductor current (which is R2 Q Q S R average input current i g . Therefore, the peak iLpk = R1 Compensation Network Vg Assuming current ripple is small, the peak input inductor current i Lpk approximately equals the also the average input current ig for boost converter) equals the peak inductor current minus the current ripple. Therefore, the average input current is given by ig = Vg Vm 1T ⋅ Vg − ⋅ V g ⋅ (1 − ) -(8) 2L Vo R s ⋅ Vo Second, the equation (8) is generated based on the assumption that the converter operates in CCM. In reality, when the input current is near zero or the load is light, the converter will operate in discontinuous mode during certain region. During DCM interval, the conversion ratio Vo Vg is not a unique function of duty cycle; it is also a function of switching period T, inductance L, load resistance, input and output voltage ratio Mg,, i.e. Vo = f (T , L, R, M g , D ) . The Vg average input current during the DCM interval will also related to these parameters such as T, L, R, Mg., D and is no longer proportional to the input voltage. A typical average inductor current 3 of 6 waveform during the half line cycle is shown in Fig.2. compensation network reduces θ as shown in Fig. 3 I B In Fig. 3 (a) and (b), Vm and Vm are the output of voltage error amplifier for the basic and improved integration controlled rectifiers I Fig. 2. Typical average inductor current during half line cycle for integration controlled boost PFC rectifiers Fig. 2 shows the average inductor current in a half line cycle. The converter operates in CCM when θ ≤ wt ≤ π − θ and DCM for the rest of the half cycle. The larger the DCM conduction angle θ is, the greater the distortion is. The proposed control method will eliminate or reduce these distortions. 3 Vm − Rs ⋅ i Lpk = Vm − k ⋅ V g T Following the same procedure, we can get the average inductor current as follows: Vm ⋅ V g +( k T ) ⋅ V g ⋅ D --(10) − Rs 2 ⋅ L Rs ⋅ Vo R ⋅T Let k = s , the average inductor current will 2⋅ L ig = T < VmB (as shown in Fig.3 (b)). . T Vm ⋅ V g R s ⋅ Vo VmB − -------(11) From equation (11), the average input current will be exactly proportional to the input voltage. Thus, the distortion due to inductor current ripple (distortion source (1)) is eliminated. 3.2 Reduction of DCM region Another advantage of the compensation is to reduce the subinterval in each half line cycle where the converter operates in DCM, i.e. the proposed Rs ⋅ iLB B m V ⋅t T t0 t T (a) ⋅ D ⋅ T ----(9) R2 where k = R1 + R 2 be VmI − k ⋅ V g The improved integration controlled boost PFC rectifiers 3.1 Ripple compensation In Fig.1, the improved integration controlled PFC boost rectifier is presented with the addition of the compensation network comprised of resistors R1, R2 and a summer. With this compensation network, the control equation (6) is modified as ig = B respectively. Likewise, i L and i L are the inductor currents of converters respectively, where the superscript “ I “ refers to the improved integration control while “ B “ refers to the basic integration control. Suppose the two converters operate in the same conditions (i.e. same input voltage and load). When t < t 0 , we assume that both the converter operate in DCM. In most case, the slope of the compensation loop for the improved integration controlled converter is smaller than that of the basic integration controlled converter, i.e. VmI − VmB − VmI − k ⋅ Vg T ⋅t Rs ⋅ iLI VmB ⋅t T t0 T t (b) Fig. 3. The control scheme comparison between the basic and improved integration control (a). The basic integration control. (b) The improved integration control Fig. 3 shows that the inductor current will go from DCM into CCM earlier for improved integration control comparing with the basic integration control. In other words, the proposed method leads to smaller θ , thus converter operates in smaller DCM region. Therefore, the proposed method reduced the distortion caused by the partial discontinuous conduction mode. This is verified by comparing the DCM conduction angle θ for the basic and improved integration controlled boost PFC. 4 of 6 The DCM conduction angle θ can be found as follows (the derivation is shown in Appendix): Fig. 4 The DCM conduction angle θ 1 θ I = a sin Mg (b) M g = 0.8, (if Vo = 385V , Vgrms = 220V ) . 1 θ B = a sin Mg 1 L Po, n 4 ⋅ − 2⋅ ⋅ + ⋅ M g ---(13) 2 2 T R ⋅ Mg 3 ⋅ π B Vgm , where Vo is the output voltage). Vo Po ,n = normalized output power, i.e. Vo ⋅ I o ; I o is the output current; Pmax is Pmax the nominal output power and R is nominal load resistance. Fig.4 shows the DCM conduction angle θ , θ vs. the normalized load for the improved and the basic integration controlled PFC boost rectifiers respectively. It is clear that in most case, the DCM conduction angle θ for improved integration control is smaller than that of the basic integration control. Therefore, the distortion of the input current should be lower. I B π 2 Mg = 0.44 Inductance L = 1mH ; ; the rated resistance R=593Ω ( Pmax = 250W when Vo = 385V ) . Fig. 2 shows that the converter operates in completely CCM if θ = 0 . Likewise, the converter operates in completely DCM when θ = π . By setting DCM conduction angle 2 θ = 0 and θ = π for equation (12) and (13), the 2 boundary condition equations (14) and (15) for the improved and the basic integration control are obtained respectively. θ I = 0 CCM / CCM & DCM boundary P I = R ⋅ T ⋅ M 2 g o ,n1 4 ⋅ L I π CCM & DCM / DCM boundary θ = 2 R ⋅T I 2 Po ,n 2 = 4 ⋅ L ⋅ M g ⋅ (1 − M g ) -------(14) θ B = 0 CCM / CCM & DCM boundary 1 4 1 2 + 3⋅π ⋅ M g B ⋅ T ⋅ R ⋅ M g2 Po,n1 = 2 ⋅ L ----(15) B π CCM & DCM / DCM boundary θ = 2 1 4 B 1 2 + 3⋅π ⋅ M g − M g ⋅ T ⋅ R ⋅ M g2 Po,n 2 = ⋅ L 2 Fig. 5 shows the CCM and CCM&DCM boundary for both control methods. The CCM is obviously enlarged for improved integration control. 1 Improved integration control I 0.628 θB Test 1.257 0.942 θ load. T = 10uS ( f = 100kHz ) the peak input voltage and output voltage, i.e. Po ,n is normalized conditions: where θ and θ are DCM conduction angle for the improved and the basic integration controlled PFC respectively. M g is the voltage ratio between Mg = and (a) M g = 0.44 (if Vo = 385V ,Vgrms = 120V ) . 4 ⋅ Po, n L ---(12) ⋅ 1 − 2 ⋅ M g ⋅ R T I θ vs. B I 0.314 0 PoI,n1 PoB, n1 0.8 CCM&DCM or DCM CCM 0.6 0.1 0.28 0.46 Po,n 0.64 0.82 Basic integration control 1 0.4 CCM&DCM or DCM CCM 0.2 (a) 0 0.2 0.36 0.52 0.68 0.84 Mg Mg = 0.8 1.257 Fig. 5. The CCM and CCM&DCM boundary for improved/basic integration control 0.942 θ I θB 0.628 4 0.314 0 0.1 0.325 (b) 0.55 0.775 1 Experiment Verification A 250W prototype boost PFC is built in order to verify the theoretical analysis. The experimental conditions are as follows: 1 5 of 6 Input voltage ranges from 85V to 270V (RMS); the output voltage is Vo = 385V , f = 100kHz ; the input inductance is L = 1mH . Fig. 6 shows the experiment result for THD comparison of the two methods vs. the normalized load. The THD is very close for both converters when the power approaches the full load. However, at the light and medium load, the THD is significantly reduced using improved integration control. This is further verified by the measured input current waveforms. Fig. 7 shows the waveforms of the input current when input voltage is 220Vrms and the output power is 100w(40% of full load). The experiments demonstrated that the proposed method not only reduces the distortion when inductor operates on CCM mode, but also enlarges the CCM region. (a) THD comparison for Vg=120V 20 THD 15 . 10 5 0 0 0.2 0.4 0.6 0.8 1 Po,n THD1 Basic integration controlled PFC THD2 Improved integration controlled PFC of full load). Top curve: input AC voltage, 100V/div, 5ms/div. Bottom curve: input AC current, 1A/div., 5ms/div (a). THD comparison for Vg=220V 5 60 50 40 THD(%) (b) Fig. 7 Line voltage and input current waveforms for an experimental 250W power factor corrected rectifier using basic/improved integration control respectively (a) Basic integration control. (b) Improved integration control Experimental conditions: V g = 220Vrms , Pout=100W (40% 30 20 10 0 0 0.2 0.4 0.6 0.8 1 Po,n THD3 Basic integration controlled PFC THD4 Improved integration controlled PFC (b) Fig. 6 The THD comparison between the improved/basic integration controlled boost PFC rectifier for input voltage Vg (rms) = 120V (a) and Vg (rms) = 220V (b) Conclusion Integration control method enables simple, low cost, stable power factor control of continuous conduction mode rectifiers. A simple compensation network is proposed in the paper to improve the performance of the integration controlled PFC. The proposed method has following advantages • Eliminate the input current distortion caused by current ripple; • Has lower THD for light and medium load by significant reducing the DCM conduction angle θ; • Easy to implement, only two resistors needed to add into the circuitry; • Easy to integrated in a single integration chip; The disadvantage is the need to sense the input voltage. However, in practice, the input voltage is required to compensate the input RMS variation anyway. The theoretical analysis is verified by the experimental results. 6 of 6 REFERENCES [1]. Lai, Z.; Smedley, K.M. “A family of powerfactor-correction controllers”. APEC'97. New York, NY, USA: IEEE, 1997. p.66-73 vol.1 [2]. J.P. Gegner, C.Q.Lee. "Linear Peak Current Mode Control: A Simple Active Power Factor Correction Control Technique For Continuous Mode". PESC 96 Record. New York, NY, USA: IEEE, 1996. p.196-202 vol.1. 2 vol. xxiv+2000 pp. [3]. D. Maksimovic, "Nonlinear-Carrier Control For High Power Factor Boost Rectifiers", IEEE Transactions on Power Electronics, vol.11, (no.4), IEEE, July 1996. p.578-84. [4]. Maksimovic, D. Design of the clamped-current high-power-factor boost rectifier. IEEE Transactions on Industry Applications, vol.31, (no.5), Sept.-Oct. 1995. p.986-92. [5]. Lai, Z, Smedley,K.M. “A General Constant Frequency Pulse-Width Modulator and Its Applications”. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, vol 45.(no.4), IEEE, April, 1998.P.386-96. Appendix The derivation of the DCM conduction angle (1) Improved integration control From section 2, if we set k = θ Rs ⋅ T , the equation 2⋅L (9) can be rewritten as Vm − Rs ⋅ i Lpk R ⋅T = (Vm − S ⋅ V g ) ⋅ D -(16) 2⋅ L If the converter operates in DCM, the inductor peak current is given by iLpk V = g ⋅ D ⋅ T --------(17) L Substituting equation (17) into (16), yields DDCM = 1 -------(18) 1 + ⋅ Vg , n Ln Vm 1 θ = a sin M g Assuming the average input power equals output power during each line cycle and power factor equals unity, we can get V gm 2 power; Pmax = ig rms Vo = 1− Vo ------(21) At the CCM and DCM boundary, ( wt = θ ), DCCM should equal to DDCM , which gives us normalized output Vo2 . Pmax is the rated power; R R = 1 Vm ⋅ V gm 1 Vm ⋅ = ⋅ ⋅ M g -2 RS ⋅ Vo 2 RS Vm = 2 ⋅ RS ⋅ Vo Po , n ⋅ 2 -------------(25) R Mg Substituting (25) into (22), we get 1 θ I = a sin M g 4⋅ P L ⋅ 1 − 2 o , n ⋅ -(26) M ⋅ R T g (2) Basic integration control Assuming the input power equals the output power during one line cycle, yields 2π 1 ⋅ ∫ Vg ⋅ i g ⋅ dwt = Po ,n ⋅ Pmax --(27) 2 ⋅π 0 where i g is determined by equation (8). Rs Vo T 2 Rs Vo Po , n 4 V gm TRs + 2 − ⋅ 2⋅L 3⋅π L Mg R --------(28) Following the similar procedure, we can get the DCM conduction angle θ follows If the boost converter operates in CCM, the duty ratio is given by DCCM = 1 − the (24) Combination of equation (24) and (23) yields Vm = V gm ⋅ sin wt = Pout = Po , n ⋅ Pmax - is rated load. For the first order approximation, the input average input current can be expressed by equation (11) no matter what kind of mode the converter operates. From equation (11), we have operates in the DCM subinterval; Ln is normalized Vg rms Po ,n is We have R ⋅ T ⋅ V0 Ln = S ----(19) 2⋅ L Vg Vgm ⋅ sin wt ---(20) Vg , n = = Vo V0 ⋅ ig (23) where Where D DCM is the duty cycle when converter inductance; Vg ,n is the normalized input voltage. V ⋅ 1 − m ----(22) Ln 1 θ B = a sin M g -------(29) B that is shown as 1 L P 4 ⋅ − 2 ⋅ ⋅ o,n 2 + ⋅ M g 2 T R ⋅ M g 3 ⋅π