PDF - American V-King Scientific Publishing
advertisement

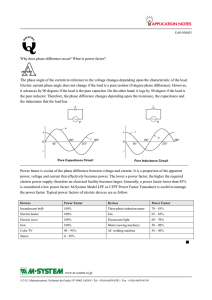
Journal of Electrical and Control Engineering JECE Series Compensation with Negative Inductance: Stability Analysis and Applications JoséAntenor Pomilio1, Leonardo de Araújo Silva2, AndréAugusto Ferreira3 School of Electrical and Computer Engineering, University of Campinas1,2 Electrical Energy Department, Federal University of Juiz de Fora 3 Brazil antenor@fee.unicamp.br;2leonardodearaujo@gmail.com; 3andre.ferreira@ufjf.edu.br 1 Abstract - This paper presents the use of synthesized negative inductances, connected in series with an electrical network for improving the power quality by mitigating disturbances as voltage drop. The negative impedance synthesis is based on Direct Reactance Synthesis method, in which the voltage produced by a power inverter is proportional to the derivative of the current. Any VSI voltage source converter can be used to implement the proposed control strategy. In order to validate the proposed method, experimental results have been obtained with a cascaded multilevel inverter that is more suitable for high power applications. Results were also obtained with a PWM inverter. The paper also presents the system dynamic modelling and its stability analysis. filter order and on its components but also on the impedance of the grid in which the device (VAPAR, DSR or BVI) is connected to. Hence, as far as series compensation of transmission or distribution lines are considered, at least a second order filter must be used. For this reason, the BVI (Bootstrap Variable Inductance) control strategy [10] seems to be less feasible for series compensation purposes. In order to produce a negative inductor, the terminal current of the VAPAR is controlled to track the reference given by (1), in which, 𝐿𝑛𝑒𝑔 , is the value of the negative inductance that is intended to be synthesized. In this case, if a voltage source converter is concerned, a closed loop feedback control algorithm must be implemented. Keywords - Series Compensation; Negative Inductance; Non Natural Impedance; Multilevel Inverter I. 𝑖𝑡∗ 𝑡 = INTRODUCTION 1 𝐿𝑛𝑒𝑔 𝑣𝑡 𝑡 𝑑𝑡. (1) it The self-inductance of transmission lines, among other effects, limits the maximum power that can be transferred through power grid busses. vc V DC Traditionally, banks of capacitors have been connected in series with long transmission lines in order decrease its impedance and increase transmission power capability. Unfortunately these capacitors may cause resonances requiring countermeasures to avoid electrical oscillations, or even generator-turbine shaft failure [1]-[2]. VSI Converter vt Low Pass Filter it ic I DC The self-inductance also impacts the voltage regulation of distribution line endings, which may not be properly compensated by step voltage regulators, especially if there are cyclical or short term variable loads. vt CSI Converter Low Pass Filter Fig. 1 VAPAR or DRS schematic circuits. This work discusses a method to synthesize non-natural impedances. This method is based on DRS (Direct Reactance Syntheses) strategy [11] that consists on realizing the control of the device’s terminals voltage instead of the current. Hence, the voltage terminal reference is given by: Controlled variable artificial negative inductances, which can be artificially synthesized with power converters, could solve these problems better than classical approach methods. Series [3]-[4], or shunt compensation [5]-[6] can be applied, depending on the disturbance nature. Hence, some control strategies to produce artificial negative inductance, as the VAPAR [7]-[9], the BVI [10] and the DRS [11] have been proposed. 𝑣𝑡∗ 𝑡 = 𝐿𝑛𝑒𝑔 𝑑𝑖 𝑡 𝑡 𝑑𝑡 (2) Equations (1) and (2) define essentially the same relationship between the terminal variables, 𝑖𝑡 and 𝑣𝑡 . However, they lead to very different control strategy approaches. Generally, the derivative operation is avoided due to fact that high frequency noise is amplified. This disadvantage can be overcome with software filters. Nevertheless, choosing equation (2) is a better alternative if series applications are concerned, because it makes possible to set up a very stable open loop control strategy, as The VAPAR (Variable Active Passive Reactance) and the DRS can be implemented by using voltage or current source converters, as show in Figure 1. In order to avoid the flow to the grid of the high frequency switching components produced by the converter, a low pass filter must be used at the converter output. The effectiveness of the filtering depends not only on the JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 22 Journal of Electrical and Control Engineering JECE Comparing both terms of the transfer function it can be noticed that for 𝐿𝑆 ≫ 𝐿𝑓 and 𝑅𝑆 ≫ 𝑅𝐿𝑓 the gain regarding 𝑉𝐶 𝑠 is higher than to 𝑉𝐴𝐵 𝑠 . Hence, the device’s terminal voltage, 𝑣𝑡 , depends more on 𝑣𝐶 than on 𝑣𝐴𝐵 . This means that the converter may be capable of rejecting disturbances caused by 𝑣𝐴𝐵 without significant increase of its output voltage 𝑣𝐶 . presented at sections II, III and IV. For real application purposes, it is desirable that a control strategy of the DC voltages of the inverter be established, because it makes possible to substitute the DC voltage sources by controlled voltage capacitors. This may reduce implementation cost and makes the compensation device less cumbersome. In section V this possibility is discussed as well as the impact of this procedure on the equivalent synthesized impedance. Experimental results are presented in sections VI and VII. II. Considering typical values of 𝑅𝑆 and 𝐿𝑆 and the use of high quality factor filter components, it is expected that 𝑅𝑆 and 𝑅𝐿𝑓 effect is dominant in the low frequency range, below synchronous frequency, while 𝐿𝑆 and 𝐿𝑓 determine the high frequency response, around synchronous and above. This issue is important because it allows that an open-loop control strategy of 𝑣𝑡 be established and, additionally, defines some design tips to achieve efficient design in terms of the converter requirements. SERIES COMPENSATION STRATEGY This section describes the realization of the proposed DRS method. Figure 2 represents a simple radial system in which the transmission line is represented by an inductance, 𝐿𝑆 , and a resistance, 𝑅𝑆 . A power electronic converter synthesizes in its terminals a virtual negative inductance, 𝐿𝑛𝑒𝑔 , that compensates part of the line reactance. In spite of being possible to set up an open-loop control strategy, it is necessary to introduce damping in order to avoid the excitation of the system modes during transient disturbances. A state space feedback algorithm [12], as shown in figure 3, can perform such damping effect. The algorithm feedbacks the states through a vector of gains 𝐤, given by (8), and through feedforward gain 𝑘𝑔 , which is necessary to make the open loop gain between 𝑣𝑡∗ and 𝑣𝑡 , at the fundamental frequency, be equal to 1. vt A jLS RS it RLf Generator RCf Cf iCf vCf B 10 o iLf Lf 𝐤 = 𝑘𝑖𝐿𝑓 vc 𝑘𝑖𝐿𝑠 𝑘𝑣𝐶𝑓 (8) v AB t jLneg vt * t kg + vc t - B + x + x C it t vt t VDC A Fig. 2. Series Compensation of a Radial Transmission System This circuit determines a two-input two-output plant that can be modelled in state space form: Fig. 3. State space feedback diagram. 𝐱=𝐀∙𝐱+𝐁∙𝐮 𝐲=𝐂∙𝐱 (3) − 𝑅𝐿𝑓 + 𝑅𝐶𝑓 /𝐿𝑓 𝑅𝐶𝑓 /𝐿𝑓 𝑅𝐶𝑓 /𝐿𝑆 1/𝐶𝑓 − 𝑅𝑆 + 𝑅𝐶𝑓 /𝐿𝑆 1/𝐶𝑓 𝐀= −1/𝐿𝑓 𝐁∙𝐮= 0 𝐲= 0 −1/𝐿𝑆 0 𝑖𝑡 = 𝐂 ∙ 𝐱 = −𝑅 𝑣𝑡 𝐶𝑓 0 0 1 𝑅𝐶𝑓 k State feedback can be used to force the eigenvalues to the left region, improving the damping characteristic. The transfer function zeroes are not affected by the state space feedback, hence it may be possible to cancel some of them. 1/𝐿𝑓 𝑇 −1/𝐿𝑆 , 0 (4) 𝑣𝐶 𝑣𝐴𝐵 , (5) 𝑖𝐿𝑓 𝑖𝐿𝑠 𝑣𝐶𝑓 (6) 0 1 This procedure guarantees that the terminal voltage, 𝑣𝑡 , asymptotically tracks the reference 𝑣𝑡∗ . Although, as far as 𝑣𝑡 is expected to be essentially sinusoidal, the poles should be placed in a frequency that is much higher than the fundamental one. The high frequency gain produced by the derivative operation of equation (2) can be limited by adding poles [13] as illustrated in figure 4. A drawback of doing this is the introduction of a delay that leads to a phase displacement on the reference voltage and that depends on the frequency that the poles are inserted. The delay is small if the poles are inserted in a high frequency. However, as high is this frequency, as poor is the filtering action introduced by the poles. The transfer functions from the inputs, 𝑣𝐴𝐵 and 𝑣𝐶 , to the output 𝑣𝑡 are given by: 𝑉𝑡 𝑠 = 𝑠 2 𝐿𝑆 𝑅𝐶𝑓 𝐶𝑓 +𝑠 𝐿𝑆 +𝑅𝑆 𝑅𝐶𝑓 𝐶𝑓 +𝑅𝑆 𝜆 𝑠 𝑠 2 𝐿𝑓 𝑅𝐶𝑓 𝐶𝑓 +𝑠 𝐿𝑓 +𝑅𝐿𝑓 𝑅𝐶𝑓 𝐶𝑓 +𝑅𝐿𝑓 𝜆 𝑠 . 𝑉𝐶 𝑠 + . 𝑉𝐴𝐵 𝑠 (7) 𝜆 𝑠 is the system characteristic polynomial. JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 23 Journal of Electrical and Control Engineering Lneg p 2 s vt * t s p 2 JECE v AB t kg + vc t - B + x + x C complex plane. However, this would require high gains that might not be feasible for practical implementations. it t vt t One of the zeroes of the transfer function (17) is closed to the origin and, due to this, one of the system poles can be placed closed to it, without dynamic degradation. The other system poles can be placed at a frequency 10 times higher than the maximum frequency that the device is supposed to behave as a negative inductance. derivator A k Fig. 4. DRS implementation with State Space feedback. If the reference voltage to be synthesized by the DRS is essentially sinusoidal, the feedforward open loop gain, 𝑘𝑔 , must be calculated to make the gain of the transfer functions between 𝑣𝑡 and 𝑣𝑡∗ unitary at the fundamental frequency: III. THE EQUIVALENT SYNTHETIZED IMPEDANCE An expression for the equivalent synthesized impedance by the DRS can be determined. From the schematic diagram of figure 2, it can be noticed that this impedance is given by: 𝑍𝑆𝐷𝑅 𝑠 = 𝑉𝑡 𝑠 𝐼𝑡 𝑠 = 1+𝑠𝑅 𝑐𝑓 𝐶𝑓 𝑠𝐶𝑓 ∙ 𝐼𝐶𝑓 𝑠 𝐼𝑡 𝑠 = 𝑍𝐶𝑓 𝑠 ∙ 𝐼𝐶𝑓 (𝑠) 𝐼𝑡 (𝑠) 𝑉𝑡 (𝑠) 𝑉𝑡∗ (𝑠) (9) (11) (12) From figure 4: 𝑉𝑡∗ 𝑠 = 𝑠𝑝1 𝑝2 𝐿𝑛𝑒𝑔 𝐼𝑡 𝑠 / 𝑠 + 𝑝1 𝑠 + 𝑝2 𝑉𝐶 𝑠 = 𝑘𝑔 𝑉𝑡∗ 𝑠 + 𝐤. 𝐗(𝑠) 𝑘 𝑣𝐶𝑓 𝑠𝐶𝑓 𝐼𝐶𝑓 𝑠 = 𝑍𝐿𝑓 + 𝑘𝑖𝐿𝑓 𝐼𝐿𝑓 𝑠 + (14) 𝑠𝑘 𝑔 𝐿𝑛𝑒𝑔 𝑝 1 𝑝 2 𝑠+𝑝 1 𝑠+𝑝 2 𝑘𝑖𝐿𝑠 𝐼𝑡 𝑠 + 𝑠𝐿𝑛𝑒𝑔 𝑘 𝑔 𝑝 1 𝑝 2 + 𝑍𝐿𝑓 +𝑘 𝑖𝐿𝑓 +𝑘 𝑖𝐿𝑠 𝑠+𝑝 1 𝑠+𝑝 2 𝑠𝐶𝑓 𝑠𝐶𝑓 𝑍𝐿𝑓 +𝑍𝐶𝑓 +𝑘 𝑖𝐿𝑓 −𝑘 𝑣𝐶𝑓 𝑠+𝑝 1 𝑠+𝑝 2 TABLE I Output filter 𝐼𝑡 𝑠 Series Inductor (16) Control Gains Finally, substituting (16) in (9) the expression for the DRS impedance is found: 𝑍𝐷𝑅𝑆 𝑠 = 𝐿𝑓 0 0 𝑇 = 𝑠=𝑗 2𝜋60 (18) (15) Substituting (10) in (15) and isolating𝐼𝐶𝑓 : 𝐼𝐶𝑓 𝑠 = 1 The control diagram of figure 4 has 5 poles. Two of them can be directly located with equation (4), and the three other poles can be located by choosing proper values of control gains, using standard state space theory. One of these poles can be located to cancel the zero that is close to the imaginary axis, which is helpful to ensure lower control gains. The system parameters and control gains are shown in Table 1. (13) If (13) and (14) are substituted in (11) the following expression can be found: 𝑍𝐶𝑓 − − In order to verify the feasibility of the proposed method for practical system, a low power prototype of the circuit shown in figure 2 has been built in laboratory. The electric parameters of the filter ( 𝐿𝑓 , 𝑅𝐿𝑓 , 𝐶𝑓 , 𝑅𝐶𝑓 ) and the series impedance (𝑅𝑆 , 𝐿𝑆 ,) are shown in Table I. They have the same order of magnitude of real parameters of a high voltage long transmission line. Where, 𝑍𝐿𝑓 𝑠 = 𝑅𝐿𝑓 + 𝑠𝐿𝑓 . −1 1 (10) 𝑍𝐶𝑓 𝑠 𝐼𝐶𝑓 𝑠 = 𝑍𝐿𝑓 𝑠 𝐼𝐿𝑓 𝑠 + 𝑉𝐶 𝑠 . = 𝑘𝑔 −𝑅𝑐𝑓 𝑅𝑐𝑓 1 𝑠𝐈 − 𝐀 − 𝐤𝐱 From that circuit we can also obtain the following expressions: 𝐼𝐿𝑓 𝑠 = 𝐼𝑡 𝑠 − 𝐼𝐶𝑓 𝑠 , 𝑠=𝑗 2𝜋60 System poles 𝑠𝐿𝑛𝑒𝑔 𝑘 𝑔 𝑝 1 𝑝 2 + 𝑍𝐿𝑓 +𝑘 𝑖𝐿𝑓 +𝑘 𝑖𝐿𝑠 𝑠+𝑝 1 𝑠+𝑝 2 1+𝑠𝑅 𝐶𝑓 𝐶𝑓 𝑠𝐶𝑓 𝑍𝐿𝑓 +𝑍𝐶𝑓 +𝑘 𝑖𝐿𝑓 −𝑘 𝑣𝐶𝑓 𝑠+𝑝 1 𝑠+𝑝 2 (17) Controller Expression (17) indicates that the impedance depends on the state feedback gains, on the derivative poles, on the resistances and on the filtering elements. However it doesn’t depend on the line impedance, neither on 𝑣𝐴𝐵 . In other words, it doesn’t depend on the parameters of the system that the DRS is connected to. DC/CA Converter Voltage Source (vAB) IV. CONTROL SETUP AND STABILITY ANALYSIS Theoretically, state space feedback can allocate system poles anywhere in complex plane and the best results would be achieved if these poles were placed far left in the SYSTEM PARAMETERS Lf = 3,24 mH, RLf = 1,0, powder iron core; Cf = 344F, RCf = 0,096, (Polyester) LS = 449mH, RS= 17,98, (Laminated iron core) Kg = 2,79 k = [ -22,056 22,926 1,791] 𝑝1,2 = −2𝜋800∠ ± 45𝑜 𝑝3,4 = −2𝜋800∠ ± 30𝑜 𝑝5 = −50 Texas Instruments DSP - TMS320F2812 Switching frequency: 12kHz Control frequency 24kHz Discretization method: Bilinear Three series connected H-bridge International Rectifier modules (IRAMX16UP60A) (Multilevel Asymmetric Cascaded single phase converter) DC voltages: (99V: 33V: 19.8V) * Total DC voltage: 𝑉𝐷𝐶 = 151.8𝑉 * unless otherwise specified. DC capacitances: 2.82mF (electrolytic) Programmable voltage and frequency power source California Instruments (4500 iL) Figure 5 shows the representation of the equivalent impedance of an ideal negative inductor and the synthesized impedance obtained with DRS method for this set of JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 24 Journal of Electrical and Control Engineering JECE parameters. The synthesized impedance approaches the reference impedance for low frequencies. As the frequency rises, magnitude and phase errors impedance become greater. At the fundamental frequency, 60 Hz for example, the magnitude still is very close to the magnitude reference, although the phase is no longer so close. The difference is due to the position of the poles that have been introduced to the derivative operation and the not canceled complex poles of the transfer function (18). If operation at higher frequencies is concerned, those poles must be moved left in the complex plane. An alternative is to decrease the damping rate of the complex poles of equation (13) and (18), or use just one pole for equation (13). For series compensation application, in which low frequency behavior is concerned, the control bandwidth does not need to be high. Hence, the chosen set of control parameters may lead to satisfactory results. substitution of the DC voltage source by controlled voltage capacitors. Ideally, if it were possible to synthesize an ideal negative inductance, there would be no active power transfer between the DRS device and the power line source. However, for practical situations, it is necessary to absorbs active power from line in order to compensate the converter losses. Additionally, the phase of the synthesized impedance, which is not equal to -90ºfor all frequencies, cause some impact on the active power flow between the converter and the line. Taken into account that the voltage and current waveforms in transmission systems are essentially sinusoidal, the active power flow is strongly dependent on the impedance phase at the fundamental frequency. From figure 5, it can be noticed that this phase is smaller than -90º, which means that the DRS device must provide active power to the system. 4 Magnitude () 10 The phase difference can be corrected by adding to the reference voltage, 𝑣𝑡∗ , a signal that is proportional to the terminal current, 𝑖𝑡 , as shown in figure 7. This technique is known as resistive load synthesis, because the proportionality ratio, which is determined by the DC controller, 𝑅𝑐𝑜𝑚𝑝 , has a resistive behavior [14]. 3 10 2 10 1 10 0 10 1 10 2 3 10 4 10 10 0 If multilevel DC/AC converters are concerned, the proposed DC phase correction strategy can be used to control the total DC voltage. However it is also necessary to implement a strategy to equalize each DC voltage source of the multilevel converter that depends on the multilevel topology. Phase (º) -90 -180 -270 -360 Ideal Negative Inductance Synthesized Impedance -450 1 10 2 3 10 4 10 10 Frequency (Hz) The proposed DC control method affects the synthesized impedance and a new expression for it can be found. Assuming that losses are negligible and the terminal voltage and current are sinusoidal, the steady state value of 𝑅𝑐𝑜𝑚𝑝 is the real part of expression (17) at the fundamental frequency. The low pass filter is supposed to eliminate the 120 Hz oscillation of 𝑉𝐷𝐶 . Due to this, 𝑅𝑐𝑜𝑚𝑝 can be assumed to be constant over a line cycle and the expression for the converter voltage becomes: Fig. 5. Magnitude and Phase Diagram of the Synthesized Impedance. Stability analysis of the DRS device with different negative inductance reference values or with different system parameters can be tested using classical control theory. Figure 6, for example, shows the system poles location if negative inductance reference value varies from 0 to 100% of series line inductance. 1 x 10 4 400 0.259 0.8 0.259 0.383 7e+003 0.5 0.5 300 300 250 0.707 6e+003 0.793 5e+003 Imaginary Axis 150 3e+003 0.966 2e+003 0.991 100 100 0.966 𝑍𝐷𝑅𝑆 𝑠 = 0 1e+003 0.991 2e+003 0.966 0.991 -100 50 0.966 150 4e+003 0.866 0.793 -0.6 5e+003 2 (20) -200 200 0.793 (21) 0.707 6e+003 0.707 0.609 0.5 7e+003 0.383 -0.8 0.259 250 -6000 -4000 -2000 0 * VCC t 0.609 -300 300 0.5 0.131 8e+003 0.383 0.259 -1 -10000 -8000 𝑠𝐶𝑓 𝑍𝐿𝑓 + 𝑍𝐶𝑓 + 𝑘𝑖𝐿𝑓 −𝑘𝑣𝐶𝑓 𝑠 + 𝑝 𝑤 𝑠 = 𝑍𝐿𝑓 + 𝑘𝑖𝐿𝑓 + 𝑘𝑖𝐿𝑠 + 𝑘𝑔 𝑅𝑐𝑜𝑚𝑝 (𝑠 + 𝑝)2 0.924 0.866 1 + 𝑠𝑅𝐶𝑓 𝐶𝑓 100 3e+003 0.924 𝑠𝐿𝑛𝑒𝑔 𝑘𝑔 𝑝2 + 𝑤 𝑠 50 0.991 1e+003 0 -0.4 200 0.866 0.924 0.924 -0.2 200 4e+003 (19) Consequently, the new expression for the synthesized impedance is: 0.707 0.793 0.866 0.4 0.2 𝑉𝐶 𝑠 = 𝑘𝑔 𝑉𝑡∗ 𝑠 + 𝐤 ∙ 𝐗 𝑠 + 𝑅𝐶𝑜𝑚𝑝 𝑘𝑔 𝐼𝑡 𝑠 350 0.609 0.609 0.6 0.131 0.383 0.131 8e+003 -400 -400 -300 Real Axis -200 -100 0.131 VCC t 350 0 Real Axis Lneg p1 p 2 s s p1 s p2 Fig. 6. System poles location if negative inductance reference value varies from 0 to 100% of series line inductance. + - PI x LPF vt * t Rcomp kg + + - vC t B x x C it t vt t derivador v AB t V. + + DC VOLTAGE CONTROL A k An important issue for practical implementation is the control of the DC voltages, because it makes possible the Fig. 7. DRS implementation with state space feedback and DC voltage control strategy. it t Lneg p1 p 2 s vt * t x vC t x kg + C + B + vt t s p1 s p2 JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing derivador 25 v AB t A k Journal of Electrical and Control Engineering JECE Figure 8 shows the synthesized impedance behavior (20) in the frequency domain, considering the DC voltage control. At the fundamental frequency the phase is -90º. The result is valid if the terminal voltage and current are essentially sinusoids. Due to the converter and filter losses, it is expected that the required value of 𝑅𝑐𝑜𝑚𝑝 rises. Consequently, for practical implementation, the magnitude and phase graphics may move slightly up, especially in the low frequency range. harmonics. The spectrum is in compliance with IEEE-519 standards, even if the more restrictive limits are considered. vt it vC 4 Magnitude () 10 iLf 3 10 2 10 1 10 0 10 1 10 2 3 10 10 4 10 Fig. 9. Experimental result – Line frequency = 60 Hz, 𝑣𝐴𝐵 = 175 Vrms, 𝐿𝑛𝑒𝑔 = -0.16 H. Voltage (50 V/div.), Current (1 A/div.), time (5 ms/div.). 0 Phase (º) -90 -180 -270 -360 -450 1 10 Ideal Negative Inductance DRS without VDC Control DRS with VDC Control vt 2 3 10 10 it 4 10 Frequency (Hz) Fig. 8. Magnitude and Phase diagrams of the synthesized impedance considering the DC control strategy. vC iLf VI. EXPERIMENTAL RESULTS Figure 9 shows steady-state experimental results using a single-phase multilevel asymmetric cascaded inverter [15][17]. The converter is implemented with 3 series connected single-phase H-bridge modules whose DC voltages follow the ratio (1.2 : 2 : 6) [18]. The DC voltage equalization between different cells can be obtained by using the control strategy presented in [19]. Fig. 10. Experimental result – Line frequency = 100 Hz, 𝑣𝐴𝐵 = 175 Vrms, 𝐿𝑛𝑒𝑔 = -0.16 H. Voltage (50 V/div.), Current (1 A/div.), time (2 ms/div.). vt At the top of the figure are displayed the terminal voltage, 𝑣𝑡 , and current of the synthesized negative inductance, 𝑖𝑡 . At the bottom, are shown the unfiltered converter output voltage, vC, and current iLf. The synthesized negative inductance value, 𝐿𝑛𝑒𝑔 = –0.16 H (equivalent to 35% of the series impedance). The test has been made with 𝑣𝐴𝐵 = 175 Vrms. The terminal voltage waveform slight distortion is due to the saturation of the magnetic core of the inductor that represents the series inductance 𝐿𝑆 . it vC iLf Fig. 11. Experimental result – Line frequency = 100 Hz, 𝑣𝐴𝐵 = 175 Vrms, 𝐿𝑛𝑒𝑔 = -0.16 H. Voltage (50 V/div), Current (1 A/div), time (2 ms/div.). Current (0.5 A/div.). In order to demonstrate this, another experimental test has been made with higher line frequency. Figure 10 shows the steady state result for 100 Hz, which is high enough to guarantee that the magnetic core does not saturate, so voltage and current distortion are negligible. Figure 11 shows the same experimental result of figure 10 obtained with PWM inverter, instead of multilevel converter. Both results are equivalent, except for the switching noise in the current that is much higher in the PWM solution. Figure 12 shows the terminal current spectrum. The harmonic distortion is quite low; with amplitudes of odd harmonics components bellow 48 dB ( 0.4%) of the fundamental, and bellow 70 dB ( 0.03%) for the even Fig. 12. Experimental result – Terminal current spectrum with multilevel converter. (𝑣𝐴𝐵 = 175 Vrms, 100 Hz, 𝐿𝑛𝑒𝑔 = - 0.16 H). Horizontal (250 Hz/div.), Vertical (20 dB/div.). JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 26 Journal of Electrical and Control Engineering JECE Figure 13 shows the transient response to a step variation of the reference inductance from –0.08 H to –0.16 H. Figure 14 shows the transient response to a step variation of the 𝑣𝐴𝐵 voltage from 117 Vrms to 175 Vrms (50% increase). During both transients it can be noticed a small DC component on the terminal current, it, that exponentially vanishes few cycles after the transient beginning. This sort of transient is typically related to first order RL circuits. Another important issue to be considered is the fact that there are no voltage or current oscillations due to filter resonances. This certainly would not happen if capacitors were used for series compensation or if plant poles were not correctly positioned in complex plane. it low power prototype. The voltage drop shown in the figure is 7% of the nominal voltage of load A. Infinite Busbar B Load A Load B Fig. 15.Schematic circuit diagram used to emulate voltage fluctuations due to load variations. vt vc iLf Fig. 13.Experimental Result – Transient response of inductance reference variation, 𝐿𝑛𝑒𝑔 , from –0.08 H to –0.16 H. Voltage (50 V/div.), Current (1 A/div.). it Fig. 16. Voltage at load A without compensation (at the top, 133 V/div.) and line current (1 A/div.). A controlled variable negative inductance in series with the distribution line could reduce or even eliminated such load voltage drop at the PCC, as shown in Figure 17. vt Several methods can be used to determine the required value of negative inductance to compensate the voltage drop at the grid and, hence, stabilize the voltage at load A. It is possible, for example, to measure the voltage A, compare it to a desired value, and use the voltage error and the compensator determines the value of the negative inductance. vc iLf An alternative that produces faster dynamic response is to determine the inductance directly from the current, which is possible if load and system parameters are known. Fig. 14. Experimental Result - Transient response of line voltage 𝑣𝐴𝐵 variation, from 117 Vrms to 175 Vrms. (50 % increase). Voltage (50 V/div.), Current (1 A/div.). Figure 18 shows the control diagram implemented, in which it makes the calculation of the peak current according to (22) and uses this value to adjust the reference negative inductance value, (23). This equation was obtained empirically and is valid for the particular parameters of this circuit. Note that, unlike other strategies of compensation of voltage drop, the proposed strategy does not require an active power supply at the DC side of the converter. The experimental results presented so far confirms the feasibility of the DRS method to synthesize negative inductances. VII. A MITIGATION OF VOLTAGE DROP Another possible application of negative inductances, besides series compensation of transmission lines, could the mitigation of voltage fluctuations. The circuit of Figure 15 illustrates a simple case that illustrates how the problem could occur. The circuit has two loads connected to the same grid bar, the Point of Common Coupling (PCC). The switching of load B causes voltage variations on load A, such as those of the Figure 16 that has been obtained using a In order to verify the operation of the proposed system, an experimental low power prototype has been implemented in laboratory. Figure 19 shows experimental results of the circuit of Figure17. When the load current increases, the negative inductance reference value is also increased, thus compensating the voltage drop. In spite of the sudden JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 27 Journal of Electrical and Control Engineering JECE current variation the load voltage is reestablished smoothly and faster than half a cycle. 2 𝐼𝑝𝑖𝑐𝑜 = 𝑖 3 𝑡𝑎 𝐿𝑛𝑒𝑔 = −𝐿𝑆 + 1 1 3 3 2 − 𝑖𝑡𝑏 − 𝑖𝑡𝑐 3 𝑖𝑡𝑏 + 3 3 𝑖𝑡𝑐 2 0,27 (23) C jLneg LS There are different approaches for producing such negative inductance behavior. This paper has used the Direct Reactance Synthesis, which, essentially, solves the inductance equation. For the control strategy implementation the method requires only voltage and current measurements to produce a negative or positive reference inductance behavior. It has been shown that the produced inductance does not depend on the parameters of the system where the DRS device is connected (line impedance and equivalent voltage, 𝑣𝐴𝐵 ), despite the openloop control configuration. (22) 𝐼𝑝𝑖𝑐𝑜 VC Infinite Busba r 3 + overall line inductance, permitting the power flow control, the voltage regulation, etc. VC VC C C Asymmetric H-bridge Multilevel Converter RS The realization of this device was verified with PWM and with multilevel inverters. For high power applications, the multilevel topology seems to be more attractive since it allows reaching higher output voltage and can minimize the switching frequency noise. Results have shown that the proposed DRS realization method for negative inductance synthesis reach good performance. The device produces clean voltage and current waveforms in its terminals and exhibits satisfactory dynamic performance during transients. Experimental results have shown that the state feedback eliminates possible oscillations due to interaction of the filtering capacitance with inductive elements. PC C A Load A Load B Fig. 17. Schematic circuit diagram used to test the applicability of variable negative inductance to mitigate voltage variations. vDC t vDC* PI + - R COMP x t derivator p1 p 2 s s p1 s p2 ia ib ic Eq.(25) I peak f(Ipico) L neg x * vt t kg + + - vC t B + x + it t x C vt t ACKNOWLEDGMENTS A Plant The authors would like to thank the Brazilian agencies FAPESP (Fundação de Amparo à Pesquisa do Estado de São Paulo), CNPq and CAPES by the financial support, Texas Instruments by providing DSP starter kit used to implement the control strategy, and Bevian by the International Rectifier integrated inverter modules. k Fig. 18. Control diagram of variable negative inductance applied to mitigate voltage fluctuations. it The authors also would like to thank Ricardo Q. Machado, Fernando P. Marafão, Giuliano Sperandio, Fellipe Garcia and Edson Vendrusculo. (1A/div) Lneg (-8mH/div) -104mH -62mH REFERENCES IEEE Committee Report by Subsynchronous Resonance Working Group of the System Dynamic Performance Subcommittee, “Reader's guide to subsynchronous resonance”, IEEE Transactions on Power Systems, Vol. 7, Issue 1, Feb. 1992, pp. 150 – 157. P. S. Kundur, Power System Stability and Control, Ed. McGrawHill, NJ: 1989, Inc, ISBN 0-07-035958-X. A. C. Borre; R. Dias; A. C. Siqueira de Lima; E. H. Watanabe, “Converter Based Controlled Reactance for Damping Subsynchronous Resonance”, IPST - International Conference on Power Systems Transients, Kyoto, Japan, 2009. Li Ming; Wang Yue; Wang Zhaoan, “The application of virtual inductance in distributed flexible AC transmission system”, International Conference on Electrical and Control Engineering (ICECE), 2011, pp. 5042 – 5044 A.S. Morsy; S. Ahmed; P. Enjeti; A. Massoud, “An active damping technique for a current source inverter employing a virtual negative inductance”, Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), 2010, pp. 63 - 67 vPCC (133V/div) vC (133V/div) iC (1A/div) Fig. 19.From top to bottom: total load current; negative inductance reference value; load voltage; inverter output voltage; Inverter output current. VIII. CONCLUSION Series compensation of electrical feeders is necessary in many situations. The use of power converters in this application allows implementing compensation strategies as the synthesis of negative inductance which reduces the JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 28 Journal of Electrical and Control Engineering JECE X. Wang; F. Blaabjerg; Z. Chen, “Synthesis of Variable Harmonic Impedance in Inverter-Interfaced Distributed Generation Unit for Harmonic Damping Throughout a Distribution Network”, IEEE Trans. on Industry Applications, Vol. 48 , Issue 4, 2012, pp. 1407 - 1417 H. Funato, and A. Kawamura, “Control of variable active-passive reactance (VAPAR) and negative inductance”, 25th Annual IEEE Power Electronics Specialists Conference, 20-25 June 1994, pp. 189 - 196 H. Funato, and A. Kawamura, “Realization of negative inductance using variable active-passive reactance (VAPAR)”, IEEE Transactions onPower Electronics, volume: 12, Issue: 4, July 1997, pp. 589 – 596. H. Funato, A. Kawamura, T. Watanabe and K. Kamiyama, “Improvement of Reactance Compensator using Variable Active-Passive Reactance with Output Filter”, Proceedings of the Conference – Nagaoka, Japan, Volume: 1 , 3-6 Aug. 1997, pp. 355 - 360 M.T. Bina and D.C. Hamill, “Transient response and stability of the bootstrap variable inductance (BVI)” IEEE 32nd Annual Power Electronics Specialists Conference, 2001.PESC. 2001, Vol. 2, 17-21 June 2001 pp. 510 – 515. T. E. Nuñez-Zuñiga, J. A. Pomillo, “Síntesis de Impedancias no Naturales y Aplicaciones en Sistemas eléctricos”, Anais do IX Congreso Internacional de Ingeniería Electrónica, Eléctrica y de Sistemas – INTERCON’99, Callao, Perú, Agosto de 2002. C.T. Chen, Linear System Theory and Design, Oxford, 3rd Edition, NY: 1999, pp. 231-247. G.H. Bode, D.N. Zmood, P.C. Loh and D.G. Holmes, “A novel hysteresis current controller for multilevel single phase voltage source inverters”, Power Electronics Specialists Conference, 2001.PESC.2001 IEEE 32nd Annual, Vol. 4, 17-21 June 2001 pp. 1845 – 1850, vol. 4. T.E. Nunez-Zuniga, J.A. Pomilio, “Shunt active power filter synthesizing resistive loads”, IEEE Transactions on Power Electronics, Vol. 17, Issue 2, March 2002, pp. 273 – 278. J. Dixon, L. Moran, “Multilevel inverter, based on multi-stage connection of three-level converters scaled in power of three,” IEEE 2002 28th Annual Conference of the Industrial Electronics Society, IECON 02, Vol: 2, pp. 886 – 891, 5-8 Nov. 2002. C. Rech, H. Pinheiro, H.A. Gründling, H.L. Hey and J.R. Pinheiro, “Analysis and comparison of hybrid multilevel voltage source inverters,” 2002 IEEE 33rd Annual Power Electronics Specialists Conference, PESC 02, volume 2, pp. 491 – 496, 23-27 June 2002. M.D. Manjrekar, P.K. Steimer, T.A. Lipo, “Hybrid Topology for Multilevel Power Conversions,” U. S. Patent 6 005 788, 1999. L.A. Silva, S.P. Pimentel, J.A. Pomilio, “Analysis and Proposal of Capacitor Voltage Control for an Asymmetric Cascaded Inverter,” Power Electronics Specialists Conference, 2005. PESC 05. L.A. Silva, S.P. Pimentel, J.A. Pomilio, “Nineteen-level Active Filter System using Asymmetrical Cascaded Converter with DC Voltages Control,” Power Electronics Specialists Conference, 2005. PESC 05. JoséAntenor Pomilio is electrical engineer (1983), Master (1986) and Ph.D. (1991) in Electrical Engineering from University of Campinas - UNICAMP. From 1988 to 1991 he was head of the Power Electronics of the Brazilian Synchrotron Laboratory. Conducted post-doctoral internships at the University of Padova (1993/1994) and the Third University of Rome (2003), both in Italy. He was president of the Brazilian Association of Power Electronics - SOBRAEP and member of various boards of this entity. He was member of the administrative committee of the IEEE Power Electronics Society for 4 years. He is associate editor ofIEEE Transactions on Power Electronics, andAdvances in Power Electronics (Hindawi Publ. Co.). He is professor at the School of Electrical and Computer Engineering at UNICAMP, where he worked since 1984. Leonardo de Araújo Silvawas born in 1976 in Iporá, atthe state of Goiás, Brazil.He graduated in electrical engineeringin 1998 at the Federal University of Goiás – UFG and obtained the MSc. and DSc. degreesat the State University of Campinas – UNICAMP, at the state of São Paulo, Brazil, in 2000 and 2007.From 2008 to 2010 he worked for the Brazilian oil company, Petrobras, and since 2010 he works at the Brazilian Electricity Regulatory Agency - ANEEL. André Augusto Ferreira received the Electrical Engineering degree from the Federal University of Juiz de Fora (UFJF), Juiz de Fora, in 2000, and M.E. and Ph.D. degrees in Electral Engineering from University of Campinas (UNICAMP), Campinas, in 2002, and 2007, respectively.He joined Federal University of Pampa (UNIPAMPA), Alegrete, Brasil, in 2008. Since 2009 he has been with the Electrical Engineering Department at Federal University of Juiz de Fora, Juiz de Fora, Brasil, where he teaches Power Electronics, Electric Machines, Dynamic Control, Digital Logic Circuits, Energy and Electricity, Electrical Installation, and Industrial Automation.His main areas of research interest are electric vehicles, solar photovoltaic energy, power quality, power electronics, and their control systems.He is member of Brazilian Society of Power Electronics (SOBRAEP) and he is also registered professional in the Brazilian Council of Engineering (CREA/COFEA). JECE Vol. 4 No. 2, 2014 PP. 22-29 © American V-King Scientific Publishing 29