Experiments with Improved Approximate Mean Value Analysis
advertisement

Experiments with Improved
Approximate Mean Value Analysis Algorithms
?
Hai Wang and Kenneth C. Sevcik
Department of Computer Science
University of Toronto
Toronto, Ontario, Canada M5S 3G4
{hai,kcs}@cs.toronto.edu
Abstract. Approximate Mean Value Analysis (MVA) is a popular technique for analyzing queueing networks because of the efficiency and accuracy that it affords. In this paper, we present a new software package, called the Improved Approximate Mean Value Analysis Library (IAMVAL),
which can be easily integrated into existing commercial and research
queueing network analysis packages. The IAMVAL packages includes two
new approximate MVA algorithms, the Queue Line (QL) algorithm and
the Fraction Line (FL) algorithm, for analyzing multiple class separable
queueing networks. The QL algorithm is always more accurate than, and
yet has approximately the same computational efficiency as, the BardSchweitzer Proportional Estimation (PE) algorithm, which is currently
the most widely used approximate MVA algorithm. The FL algorithm
has the same computational cost and, in noncongested separable queueing networks where queue lengths are quite small, yields more accurate
solutions than both the QL and PE algorithms.
1
Introduction
Queueing network models have been widely adopted for the performance evaluation of computer systems and communication networks. While it is infeasible
to compute the exact solution for the general class of queueing network models, solutions can be computed for an important subset, called separable (or
product-form) queueing networks [2]. The solution for separable queueing networks can be obtained with modest computational effort using any of several
comparably efficient exact algorithms. Mean Value Analysis (MVA) [9] is the
most widely used of these algorithms. However, even for separable queueing
networks, the computational cost of an exact solution becomes prohibitively
expensive as the number of classes, customers, and centers grows. Numerous approximate MVA algorithms have been devised for separable queueing networks
[1,10,4,3,6,14,17,15,11]. Among them, the Bard-Schweitzer Proportional Estimation (PE) algorithm [10] is a popular algorithm that has gained wide acceptance
?
This research was supported by the Natural Science and Engineering Research Council of Canada (NSERC), and by Communications and Information Technology Ontario (CITO).
R. Puigjaner et al. (Eds.): Tools’98, LNCS 1469, pp. 280–291, 1998.
c Springer-Verlag Berlin Heidelberg 1998
Experiments with Improved Approximate MVA Algorithms
281
among performance analysts [5,8], and is used in most commercial and research
queueing network solution packages.
In this paper, we present a new software package, called the Improved Approximate Mean Value Analysis Library (IAMVAL), which includes two new
approximate MVA algorithms for analyzing multiple class separable queueing
networks. Both algorithms have approximately the same computational cost as
the PE algorithm. The Queue Line (QL) algorithm always yields more accurate
solutions, and hence it dominates the PE algorithm in the spectrum of different
algorithms that trade off accuracy and efficiency. The Fraction Line (FL) algorithm yields more accurate solutions than both the QL and PE algorithms, but
only for noncongested separable queueing networks where queue lengths are quite
small. These two new algorithms have the accuracy, speed, limited memory requirements, and simplicity to be appropriate for inclusion in existing commercial
and research queueing network analysis packages, and the IAMVAL library can
be integrated into these software packages to replace the PE algorithm library.
The remainder of the paper is organized as follows. Section 2 reviews material
relating to approximate MVA algorithms. Section 3 presents the QL and FL
algorithms and their computational costs. Section 4 contains a comparison of the
accuracy of the solutions of the PE, QL, and FL algorithms and discusses their
relative merits. Finally, a summary and conclusions are provided in Section 5.
2
Background
Consider a closed separable queueing network [2,9] with C customer classes,
and K load independent service centers. The customer classes are indexed as
classes 1 through C, and the centers are indexed as centers 1 through K. The
→
−
customer population of the queueing network is denoted by the vector N =
(N1 , N2 , ..., NC ) where Nc denotes the number of customers belonging to class c
for c = 1, 2, ..., C. Also, the total number of customers in the network is denoted
by N = N1 + N2 + · · · + NC . The mean service demand of a class c customer
at center k is denoted by Dc,k for c = 1, 2, ..., C, and k = 1, 2, ..., K. The think
time of class c, Zc , is the sum of the delay center service demands of class c.
→
−
For network population N, we consider the following performance measures
of interest:
→
−
Rc,k ( N) = the average residence time of a class c customer at center k.
→
−
Rc ( N) = the average response time of a class c customer in the network.
→
−
Xc ( N) = the throughput of class c.
→
−
Qc,k ( N) = the mean queue length of class c at center k.
→
−
Qk ( N) = the mean total queue length at center k.
Based on the Arrival Instant Distribution theorem [7,12], the exact MVA
algorithm [9] involves the repeated applications of the following six equations, in
→ (c) →
→ −
−
→
n)
which −
n = (n1 , n2 , ..., nC ) is a population vector ranging from 0 to N; Ak (−
is the average number of customers a class c customers finds already at center k
282
H. Wang and K.C. Sevcik
→
−
→
when it arrives there, given the network population −
n ; 1 c is a C-dimensional
→
−
th
→
vector whose c element is one and whose other elements are zeros; and (−
n − 1 c)
→
−
denotes the population vector n with one class c customer removed:
→
−
(c) −
→
n ) = Qk (−
n − 1 c ),
Ak (→
(c) →
→
n) ,
n ) = Dc,k · 1 + Ak (−
Rc,k (−
−
Rc (→
n) =
K
X
→
Rc,k (−
n ),
(1)
(2)
(3)
k=1
nc
,
→
Zc + Rc (−
n)
→
→
→
n ) = Rc,k (−
n ) · Xc (−
n ),
Qc,k (−
→
n) =
Xc (−
→
n) =
Qk (−
C
X
→
Qc,k (−
n ),
(4)
(5)
(6)
c=1
→
−
with initial conditions Qk ( 0 ) = 0 for k = 1, 2, ..., K.
The key to the exact MVA algorithm is the recursive expression in equation
→
(1) which relates performance with population vector −
n to that with population
→
−
→
−
vector ( n − 1 c ). This recursive dependence of the performance measures for one
population on lower population levels causes
QC both space and time complexities of
the exact MVA algorithm to be Θ(KC c=1 (Nc + 1)). Thus, for large numbers
of classes (more than ten) or large populations per class, it is not practical to
solve networks with the exact MVA algorithm.
The approximate MVA algorithms for separable queueing networks improve
→
(c) −
the time and space complexities by substituting approximations for Ak ( N) that
are not recursive. Among all approximate MVA algorithms, the Bard-Schweitzer
Proportional Estimation (PE) algorithm [10] is a popular algorithm that is currently in wide use. The PE algorithm is based on the approximation
(
→
−
Nc −1
→ −
−
→
Nc Qc,k ( N) for c = j,
Qj,k ( N − 1 c ) ≈
→
−
for c 6= j.
Qj,k ( N)
Hence, the approximation equation that replaces equation (1) in the PE algorithm is
C
X
1
→
→ −
−
→ −
−
→
−
→
−
→
→
(c) −
Qj,k ( N − 1 c ) ≈ Qk ( N) −
Qc,k ( N).
Ak ( N) = Qk ( N − 1 c ) =
N
c
j=1
(7)
The system of nonlinear equations (2) through (7) of the PE algorithm can be
solved iteratively by any general purpose numerical techniques, such as the successive substitution method or Newton’s method [10,3,17,8]. Zahorjan et al. [17]
found that no single implementation of the PE algorithm is guaranteed to always work well. When the PE algorithm is solved by Newton-like methods, the
Experiments with Improved Approximate MVA Algorithms
283
algorithm involves solving a nonlinear system of at least C equations [3,8], and
the algorithm may fail to converge, or may converge to infeasible solutions [17].
When the PE algorithm is solved by the successive substitution method, the
algorithm may converge very slowly in some cases, although it always yields feasible solutions [5] and converges very quickly for most networks [17]. When the
PE algorithm is solved by the successive substitution method, the space complexity of the algorithm is O(KC), and the time complexity is O(KC) per iteration
[10]. Thus, application of the PE algorithm is practical even for networks of up
to about 100 classes and about 1000 service centers. The number of customers
per class does not directly affect the amount of computation (although it may
influence the speed of convergence).
3
The Queue Line and Fraction Line Approximate MVA
Algorithms
In this section, two new iterative approximate MVA algorithms, the Queue Line
(QL) algorithm and the Fraction Line (FL) algorithm, for multiple class separable queueing networks are presented. Both algorithms improve on the accuracy
of the PE algorithm while maintaining approximately the same computational
efficiency as the PE algorithm. The improvement with the FL algorithm occurs
only in lightly loaded separable queueing networks, but the QL algorithm is more
accurate than the PE algorithm in all cases.
3.1
The Queue Line Algorithm
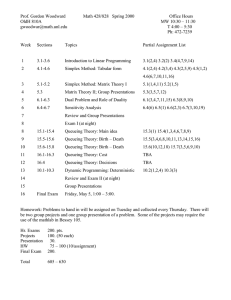
→
n ) versus
The QL approximation is motivated by observing the graph of Qc,k (−
−
→
n (as shown in Figure 1). The PE approximation is equivalent to interpolating
→
n ) for 0 and nc . The QL approximation inthe value between the values of Qc,k (−
terpolates instead between the values at 1 and nc . As can be seen in Figure 1, the
QL approximation is more accurate than the PE approximation for both bottleneck and non-bottleneck centers. The QL algorithm is based on the following
approximations:
Approximation 1 (Approximations of the QL Algorithm).
(1) when Nc = 1 and c = j,
→ −
−
→
Qj,k ( N − 1 c ) = 0,
(2) when Nc > 1 and c = j,
→
−
→ −
−
→
Qj,k ( N )−Qj,k ( N − 1 c )
1
(3) when Nc ≥ 1 and c 6= j,
=
→
−
→
−
Qj,k ( N )−Qj,k ( N −(Nc −1)
Nc −1
−
→
1 c)
,
→ −
−
→
−
→
Qj,k ( N − 1 c ) = Qj,k ( N),
→
−
→ −
−
→
where N − 1 c denotes the population N with one class c customer removed,
→
−
→
−
→
−
and N − (Nc − 1) 1 c denotes the population N with Nc − 1 class c customers
removed.
284
H. Wang and K.C. Sevcik
Like the PE algorithm, the QL algorithm assumes that removing a class c customer does not affect the proportion of time spent by customers of any other
classes at each service center. However, as shown in Figure 1, while the PE
→
−
algorithm assumes the linear relationship between Qc,k ( N) and Nc , the QL
→ −
−
→
algorithm estimates Qc,k ( N − 1 c ) by linear interpolation between the points
→
−
→
−
→
−
(1, Qc,k ( N − (Nc − 1) 1 c )) and (Nc , Qc,k ( N)).
PE Approximation
45 line
Bottleneck center(s)
QL Approximation
Qc,k (n)
Non-bottleneck centers
0
1
nc - 1
nc
Fig. 1. Approximations of the PE and QL algorithms
Approximation 1 leads to the following approximation equation that replaces
equation (1) in the QL algorithm [13,16].
QL Approximation Equation: Under Approximation 1, the approximation
equation of the QL algorithm is
→
→
−
→
−
(c) −
(1) when Nc = 1, Ak ( N) = Qk ( N) − Qc,k ( N),
(2) when Nc > 1,
h
i
→
→
−
→
−
→
−
→
−
(c) −
Ak ( N) = Qk ( N) − Nc1−1 Qc,k ( N) − Qc,k ( N − (Nc − 1) 1 c )
h
→
−
→i
−
Dc,k 1+Qk ( N )−Qc,k ( N )
→
−
→
−
n h
io .
= Qk ( N)− Nc1−1 Qc,k ( N)−
P
→
−
→
−
K
Zc +
Dc,l 1+Ql ( N )−Qc,l ( N )
l=1
(8)
Note that when there is a single customer in class c, its residence time at a center
k is given by
i
h
→
−
→
−
→
−
→
−
Rc,k ( N − (Nc − 1) 1 c ) = Dc,k 1 + Qk ( N) − Qc,k ( N) ,
because it is expected that the arrival instant queue length is simply the equilibrium mean queue length of all other classes, excluding class c. This fact is used
in the final substitution in equation (8) (and also equation (9)).
Experiments with Improved Approximate MVA Algorithms
3.2
285
The Fraction Line Algorithm
→
Q (−
n)
versus nc
The FL approximation is motivated by observing the graph of c,knc
(as shown in Figure 2). In this case, the PE approximation takes the value of this
ratio to be the same at (nc − 1) as at nc . The FL approximation estimates the
value at (nc − 1) by interpolating between the values at 1 and nc . As can be seen
in Figure 2, when nc is sufficiently small, the FL approximation becomes more
accurate than that of PE approximation for both bottleneck and non-bottleneck
centers. The FL algorithm is based on the following approximations:
Approximation 2 (Approximations of the FL Algorithm).
(1) when Nc = 1 and c = j,
→ −
−
→
Qj,k ( N − 1 c ) = 0,
(2) when Nc > 1 and c = j,
→
−
→ −
−
→
Qj,k ( N )
Qj,k ( N − 1 c )
−
=
Nc
Nc −1
(3) when Nc ≥ 1 and c 6= j,
1
Nc −1
→
−
Qj,k ( N )
Nc
−
→
−
Qj,k ( N −(Nc −1)
1
− →
1 c)
,
→ −
−
→
−
→
Qj,k ( N − 1 c ) = Qj,k ( N),
→
−
→ −
−
→
where N − 1 c denotes the population N with one class c customer removed,
→
−
→
−
→
−
and N − (Nc − 1) 1 c denotes the population N with Nc − 1 class c customers
removed.
Like the PE and QL algorithms, the FL algorithm assumes that removing a
class c customer does not affect the proportion of time spent by customers of
any other classes at each service center. Furthermore, as shown in Figure 2, the
→ −
−
→
FL algorithm estimates Qc,k ( N − 1 c ) by linear interpolation between the points
→
−
→
−
→
−
Q (N)
(1, Qc,k ( N − (Nc − 1) 1 c )) and (Nc , c,kNc ).
PE Approximation
FL Approximation
1
Bottleneck center(s)
Qc,k (n)
nc
Non-bottleneck centers
0
1
nc - 1
nc
Fig. 2. Approximations of the PE and FL algorithms
286
H. Wang and K.C. Sevcik
Approximation 2 leads to the following approximation equation that replaces
equation (1) in the FL algorithm [13,16].
FL Approximation Equation: Under Approximation 2, the approximation
equation of the FL algorithm is
→
→
−
→
−
(c) −
(1) when Nc = 1, Ak ( N) = Qk ( N) − Qc,k ( N),
(2) when Nc > 1,
→
→
−
→
−
→
−
→
−
(c) −
Ak ( N) = Qk ( N) − N2c Qc,k ( N) + Qc,k ( N −h(Nc − 1) 1 c )
→
−
→i
−
D
1+Q
(
)−Q
(
N
N)
c,k
k
c,k
→
−
→
−
2
n h
(
N)
−
Q
(
N)
+
=
Q
k
c,k
P
→
−
→ io .
−
N
c
K
Zc +
Dc,l 1+Ql ( N )−Qc,l ( N )
l=1
(9)
The system of nonlinear equations of the FL algorithm consists of (9) and (2)
through (6), while that of the QL algorithm consists of (8) and (2) through (6).
As with the PE algorithm, the system of nonlinear equations of either the QL
or the FL algorithm can be solved by any general purpose numerical techniques.
When the QL and FL algorithms are solved by Newton-like methods, like
the PE algorithm, each involves solving a nonlinear system of at least C equations, and the algorithm may fail to converge, or may converge to infeasible
solutions [13,16]. When all three algorithms are solved by Newton-like methods,
they involve solving the same number of nonlinear equations, and hence have
approximately the same space and time complexities [13,16].
When the QL and FL algorithms are solved by the successive substitution
method, like the PE algorithm, either algorithm may converge very slowly in
some cases, although they converge quickly for most networks [13,16]. When all
three algorithms are solved by the successive substitution method, their space
complexities are all O(KC) because of their similar structures. Moreover, for the
networks in which Nc > 1 for all c, the QL algorithm requires (10KC − K − C)
additions/subtractions and (6KC + C) multiplications/divisions per iteration,
while the FL algorithm requires (10KC − K − C) additions/subtractions and
(7KC + C) multiplications/divisions per iteration, as contrasted to (4KC −
K) additions/subtractions and (3KC + C) multiplications/divisions for the PE
algorithm. For networks in which Nc = 1 for all c, all three algorithms require
the same number of operations. Hence, the time complexity of either the QL or
FL algorithm is O(KC) per iteration and is identical to that of the PE algorithm
when all three algorithms are solved by the successive substitution method.
4
Accuracy of the Solutions of the Algorithms
We have experimentally evaluated the accuracy of the solutions of the QL and
FL algorithms relative to that of the PE algorithm. We choose to compare the
QL and FL algorithms against the PE algorithm because it is the most popular
and most widely used of the many alternative approximate MVA algorithms.
In each of these experiments, two thousand random networks were generated
and solved by each of the three approximate algorithms and by the exact MVA
Experiments with Improved Approximate MVA Algorithms
287
algorithm. The mean absolute relative errors in estimating the quantities, Xc ,
Rc , and Qc,k , relative to the corresponding exact values, Xc∗ , Rc∗ , and Q∗c,k , were
calculated in each case according to the following formulae:
PC X −X ∗ – For throughput, ΓX = C1 c=1 cX ∗ c ;
c
PC R −R∗ – For response time, ΓR = C1 c=1 cR∗ c ;
c
PC PK |Qc,k −Q∗c,k |
1
.
– For average queue length, ΓQ = KC c=1 k=1
Q∗
c,k
Also, the maximum absolute relative error in Qc,k was noted:
ΛQ = max
c,k
| Qc,k − Q∗c,k |
.
Q∗c,k
For each of these error measures (M ), we calculated the sample mean (M ) and
sample standard deviation (SM ) over the 2000 trials in each experiment. We
also recorded the maximum value of ΛQ (max(ΛQ )) over the 2000 trials in each
experiment.
4.1
Experiments for Multiple Class Separable Queueing Networks
In the first set of experiments, two thousand random networks were generated
and solved by each of the three approximate algorithms and the exact MVA
algorithm for each number of classes from one to four. The parameters used to
generate the random networks are given in Table 1. The mean absolute relative
errors in throughput, response time, queue length, and the maximum absolute
relative errors in queue length are shown in Table 2. Additional statistics on error
measures are presented elsewhere [16]. In these the experimental results, the QL
Table 1. Parameters for generating multiple class separable queueing networks
Server discipline:
Population size (Nc ):
Load independent
Class 1: Uniform(1,10)
Class 2: Uniform(1,10)
Class 3: Uniform(1,10)
Class 4: Uniform(1,10)
Number of centers (K):
Uniform(2,10)
Loadings (Dc,k ):
Uniform(0.1,20.0)
Think time of customers (Zc ): Uniform(0.0,100.0)
Number of trials (samples):
2000
algorithm always yielded smaller errors than the PE algorithm for all randomly
generated networks. We found that the FL algorithm yields larger errors than
the PE and QL algorithms for some networks, although it yielded smaller errors
288
H. Wang and K.C. Sevcik
Table 2. Summary of statistical results of each algorithm for multiple class separable
queueing networks whose parameters are specified in Table 1
Measure Algorithm
PE
ΓX
QL
FL
PE
ΓR
QL
FL
PE
ΓQ
QL
FL
PE
max(ΛQ )
QL
FL
1 class
0.40%
0.31%
0.05%
0.59%
0.45%
0.06%
0.69%
0.55%
0.11%
15.19%
13.13%
10.82%
2 classes
0.73%
0.67%
0.47%
0.99%
0.91%
0.63%
1.23%
1.15%
0.83%
14.82%
14.41%
11.98%
3 classes
0.82%
0.79%
0.67%
1.04%
0.99%
0.84%
1.45%
1.40%
1.20%
14.63%
14.49%
13.64%
4 classes
0.90%
0.88%
0.80%
1.09%
1.06%
0.96%
1.64%
1.61%
1.47%
16.20%
16.12%
15.62%
than the PE and QL algorithms for most of the networks among our test cases.
We also found that the error of the FL algorithm rises faster than those of
the QL and PE algorithms as the number of classes increases. By applying the
statistical hypothesis testing procedure [16], we can further conclude that, on
the average, the accuracy of all three approximate MVA algorithms decreases as
the number of classes increases, and the FL algorithm is the most accurate while
the PE algorithm is the least accurate algorithm among the three algorithms for
multiple class separable queueing networks with sufficiently small population.
However, these conclusions are only valid for small networks with a small number
of classes, and small customer populations as governed by the parameters in
Table 1. Although we would like to have experimented with larger networks
with more classes and larger populations, the execution time of obtaining the
exact solution of such networks prevented us from doing so.
4.2
Experiments for Single Class Separable Queueing Networks
In order to gain some insight into the behavior of the three approximate MVA
algorithms for larger networks than those whose parameters are specified in
Table 1, the second set of experiments was performed. This involved five experiments for single class separable queueing networks. We chose single class
separable queueing networks because it is feasible to obtain the exact solution
of such networks. The parameters used to generate the random networks in each
of these experiments are given in Table 3. The detailed experimental results for
these five experiments are presented elsewhere [16].
In these experiments, we also found the QL algorithm was more accurate than
the PE algorithm for all randomly generated single class separable queueing
networks. Moreover, we found that both the PE and QL algorithms always
yield a higher mean response time and a lower throughput relative to the exact
Experiments with Improved Approximate MVA Algorithms
289
Table 3. Parameters for generating single class separable queueing networks
Parameter
Population size (N )
Experiment
1
2
3,4,5
Number of centers (K)
1,2,3
4
5
Loadings (Dk )
1,2,3,4,5
Think time of customers (Z) 1,2,3,4,5
Server discipline
1,2,3,4,5
Number of trials (samples)
1,2,3,4,5
Value
Uniform(2,10)
Uniform(20,100)
Uniform(2,100)
Uniform(2,10)
Uniform(50,100)
Uniform(100,200)
Uniform(0.1,20.0)
Uniform(0.0,100.0)
Load independent
2000
solution. These results are consistent with the known analytic results [5,13]. We
also found that the FL algorithm tended to yield a lower mean system response
time and a higher throughput relative to the exact solution. However, some
networks for which the FL algorithm yields a higher mean system response time
and a lower throughput have been observed. By applying the same statistical
testing procedure as in the first set of experiments [16], we conclude that given a
network, as the population increases, the accuracy of the FL algorithm degrades.
Moreover, given the network population, when the number of centers increases,
the accuracy of the FL algorithm increases and the FL algorithm yields more
accurate solutions than the other two algorithms. When the network is congested,
the average queue length at some centers is large, and the approximations of both
the PE and the QL algorithms lead to better approximations than those of the
FL algorithm. These results are also consistent with the results of the first set
of experiments.
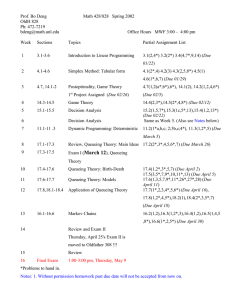
4.3
Examples
We investigated some specific examples of single class separable queueing networks to illustrate how the QL algorithm dominates the PE algorithm, and the
FL algorithm is the most accurate in low congestion networks, but the least
accurate in high congestion networks among the three approximate MVA algorithms. The network parameters of four such examples are given in Table 4.
For these cases, the absolute value of the difference between the approximate
response time and the exact response time is used to measure the accuracy of
an approximate MVA algorithm. Figure 3 shows the errors for the PE, QL, and
FL algorithms as a function of the population for Example 1. The corresponding
graphs for the other three examples all have exactly the same form. From this
we conclude that the basic form of the curves shown in Figure 3 is robust across
broad classes of single class separable queueing networks.
290
H. Wang and K.C. Sevcik
Table 4. Network parameters of examples
Example
1
2
3
4
Parameters (The subscript c on network parameters is dropped since C = 1.)
C = 1, K = 2, D1 = 1.0, D2 = 2.0, Z = 0.0, N ∈ [1, 50]
C = 1, K = 2, D1 = 10.0, D2 = 20.0, Z = 10.0, N ∈ [1, 50]
C = 1, K = 3, D1 = 10.0, D2 = 20.0, D3 = 30.0, Z = 0.0, N ∈ [1, 50]
C = 1, K = 3, D1 = 10.0, D2 = 20.0, D3 = 30.0, Z = 50.0, N ∈ [1, 50]
0.6
PE
0.5
QL
FL
Absolute Error in R
0.4
0.3
0.2
0.1
0
0
5
10
15
20
25
N
30
35
40
45
50
Fig. 3. Plot of the absolute error in R vs N for Example 1
5
Summary and Conclusions
Two new approximate MVA algorithms for separable queueing networks, the
QL and FL algorithms, are presented. Both the QL and FL algorithms have
approximately the same computational costs as the PE algorithm. Based on the
experimental results, the QL algorithm is always more accurate than the PE algorithm. Moreover, as with the PE algorithm, the solutions of the QL algorithm
are always pessimistic relative to those of the exact MVA algorithm for single
class separable queueing networks. Specifically, both the PE and QL algorithms
always yield a higher mean system response time and a lower throughput for
single class separable queueing networks. These properties, which we have observed in the experiments described here, have been formally proven to hold as
well [13,16]. The FL algorithm is more accurate than the QL and PE algorithms
for noncongested separable queueing networks where queue lengths are small,
and is less accurate than the QL and PE algorithms for congested separable
queueing networks where queue lengths are large.
The FL algorithm must be used only with caution since its accuracy deteriorates as the average queue lengths increase. The QL algorithm always has
higher accuracy than the PE algorithm. In particular, the QL algorithm dominates the PE algorithm in the spectrum of different approximate MVA algorithms
that trade off accuracy and efficiency. The IAMVAL library which includes the
QL and FL algorithms can be integrated into existing commercial and research
queueing network analysis packages to replace the PE algorithm library.
Experiments with Improved Approximate MVA Algorithms
291
References
1. Y. Bard. Some extensions to multiclass queueing network analysis. In: M. Arato,
A. Butrimenko and E. Gelenbe, eds. Performance of Computer Systems, NorthHolland, Amsterdam, Netherlands, 1979.
2. F. Baskett, K. M. Chandy, R. R. Muntz and F. G. Palacios. Open, closed, and
mixed networks of queues with different classes of customers. Journal of the ACM,
22(2):248-260, April 1975.
3. W.-M. Chow. Approximations for large scale closed queueing networks. Performance
Evaluation, 3(1):1-12, 1983.
4. K. M. Chandy and D. Neuse. Linearizer: A heuristic algorithm for queueing network models of computing systems. Communications of the ACM, 25(2):126-134,
February 1982.
5. D. L. Eager and K. C. Sevcik. Analysis of an approximation algorithm for queueing
networks. Performance Evaluation, 4(4):275-284, 1984.
6. C. T. Hsieh and S. S. Lam. PAM – A noniterative approximate solution method for
closed multichain queueing networks. ACM SIGMETRICS Performance Evaluation
Review, 16(1):261-269, May 1988.
7. S. S. Lavenberg and M. Reiser. Stationary state probabilities of arrival instants
for closed queueing networks with multiple types of customers. Journal of Applied
Probability, 17(4):1048-1061, December 1980.
8. K. R. Pattipati, M. M. Kostreva and J. L. Teele. Approximate mean value analysis
algorithms for queueing networks: existence, uniqueness, and convergence results.
Journal of the ACM, 37(3):643-673, July 1990.
9. M. Reiser and S. S. Lavenberg. Mean value analysis of closed multichain queueing
networks. Journal of the ACM, 27(2):313-322, April 1980.
10. P. J. Schweitzer. Approximate analysis of multiclass closed networks of queues.
Proceedings of International Conference on Stochastic Control and Optimization,
25-29, Amsterdam, Netherlands, 1979.
11. P. J. Schweitzer, G. Serazzi and M. Broglia. A queue-shift approximation technique
for product-form queueing networks. Technical Report, 1996.
12. K. C. Sevcik and I. Mitrani. The distribution of queueing network states at input
and output instants. Journal of the ACM, 28(2):358-371, April 1981.
13. K. Sevcik and H. Wang. An improved approximate mean value analysis algorithm
for solving separable queueing network models. submitted for publication, 1998.
14. E. de Souza e Silva, S. S. Lavenberg and R. R. Muntz. A clustering approximation technique for queueing network models with a large number of chains. IEEE
Transactions on Computers, C-35(5):419-430, May 1986.
15. E. de Souza e Silva and R. R. Muntz. A note on the computational cost of the linearizer algorithm for queueing networks. IEEE Transactions on Computers, 39(6):840842, June 1990.
16. H. Wang. Approximate MVA Algorithms for Solving Queueing Network Models.
M. Sc. Thesis, Tech. Rept. CSRG-360, University of Toronto, Toronto, Ontario,
Canada, 1997.
17. J. Zahorjan, D. L. Eager and H. M. Sweillam. Accuracy, speed, and convergence
of approximate mean value analysis. Performance Evaluation, 8(4):255-270, 1988.