V - NDIP
advertisement

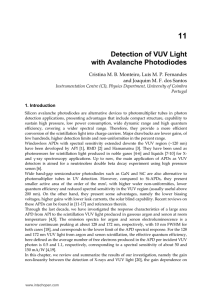
Application of Simple Negative Feedback model for Avalanche Photo Detectors investigation Kushpil Vasily (1),(2) Avalanche multiplication coefficient 1 M o= n V 1−[ ] V br Miller's formula Mo M= 1B⋅M o can be expressed using Mo: n where B= n V −[V −V fb ] V 1 M= n V −i⋅R fb 1−[ ] V br and n br V - bias voltage; Vbr – breakdown voltage; n - parameter; Rfb – feedback resistance; Cfb – feedback capacitance; (1) V fb =i⋅R fb Formula (1) can be seen as an expression for response of the system with negative feedback: Ao Output = Input 1B⋅Ao Feedback is a process whereby some proportion of the output signal of a system is passed (feedback) to the input. This is often used to control the dynamic behavior of the system . Ao- transfer function for system without feedback B- feedback coefficient We can differentiate (1) obtaining: K ef dM = 2 dV 1B⋅M o where dM o dB 2 K ef = − M o ⋅ dV dV Using Kef We can distinguish 4 types of APD's behavior (Figure 1): B = 0 no negative feedback; K > 0 feedback rising slowly then gain (unstable operation mode); K = 0 feedback rising equal to gain rise (stable operation mode); K < 0 feedback rising faster then gain (stable operation mode); Figure 1. Gain vs. biasing voltage for different Kef From this we can see that the presented model reproduces features of different produced APD exhibiting different gain characteristics. Feedback coefficient B can be found experimentally as a difference between experimental dependences of 1/Me(V) and simulated 1/Ms(V) assuming realistic value of Rfb(Figure 2). This way we can easily characterize different APDs. For example for HAMAMATSU (Figure 3) and JINR/Dubna (Figure 4) APD's. Figure 2. Calculation of negative feedback coefficient B(V) for APD from experimental data. Figure 3. Calculation of negative feedback coefficient B(V) for HAMAMATSU S8664 ( http://sales.hamamatsu.com/assets/pdf/parts_S/S8664_series.pdf). The feedback can describe the dynamics of APD. For example for t B t =B 0 t ⋅1 −exp−[ ] T fb Figure 5. Investigation of response APD for step pulse from red LED (650nm). Simulation and experimental data (1997 for JINR/Dubna APD). (1) NPI of ASCR in Řěž near Prague, (2) JINR/Dubna where Tfb=Cfb·Rfb which describes well the experimental data (Figure 5). Figure 4. Calculation of negative feedback coefficient B(V) for JINR/Dubna APD produced and measured in 1996 by author . (http://sunhe.jinr.ru/struct/neeo/apd/index.html, http://hp.ujf.cas.cz/~kushpil/FTP/Diser/A/ch5.ps (in Russian)). Conclusion: 1 APD is described as a system with negative feedback. 2 Kef and B were found as sensitive variables useful for description of APD gain behavior. 3 The model describes also dynamics features of the avalanche detector response. June 2008 for NDIP-08 (kushpil@ujf.cas.cz)