Improved Rotor Position Estimationin Extended Drives with
advertisement

Improved Rotor Position Estimation in Extended
Back-EMF Based Sensorless PM Brushless AC
Drives with Magnetic Saliency
Y. Li, Z. Q. Zhu, D. Howe, and C. M. Bingham
Department of Electronic and Electrical Engineering, University of Sheffield,
Mappin Street, Sheffield SI 3JD, UK
the extended back-EMF based sensorless control method, and
the development of a method for improving the accuracy of the
estimated rotor position are the subject of this paper.
A BLAC motor model which accounts for dq-axis
cross-coupling magnetic saturation and the improved extended
Abstract-An improved extended back-EMF based sensorless
control method is proposed for a brushless AC motor equipped
with an interior permanent magnet rotor. It accounts for dq-axis
cross-coupling magnetic saturation by introducing an apparent
mutual winding inductance. The error which results in the
estimated rotor position when the influence of cross-coupling
magnetic saturation is neglected is analyzed analytically, predicted
by finite element analysis, and confirmed experimentally, for
various d- and q-axis currents. It is shown that a significant
improvement in the accuracy of the rotor position estimation can
be achieved by the proposed method, as confirmed by
measurements.
I. INTRODUCTION
It is desirable to eliminate the need for a precision rotor
position sensor in permanent magnet (PM) brushless AC
(BLAC) drives, by employing a sensorless technique. While
signal injection based sensorless schemes can successfully
estimate the rotor position at standstill and low speeds [1],
back-EMF based sensorless techniques are only applicable to
higher speeds [2]-[4]. Hence, it is common to employ a hybrid
sensorless technique, which uses both a signal injection based
method and a back-EMF based method [5]. Back-EMF based
sensorless methods were first developed to estimate the rotor
position of BLAC motors having a surface-mounted PM rotor
without rotor magnetic saliency. They were then extended to
BLAC motors having different d-axis and q-axis inductances
[2]-[4], which led to the 'extended' back-EMF method in which
the d-axis inductance term was combined with the EMF term in
order to make the impedance matrix of the dq-axis voltage
equations symmetrical. In [2], the influence of magnetic
saturation was neglected, and the q-axis apparent inductance
was assumed to be constant. Magnetic saturation was
subsequently considered in [3] [4]. However, although the
influence of dq-axis cross-coupling magnetic saturation is
well-known in permanent magnet brushless machines [6], for
simplicity it has not been considered in existing extended
back-EMF based sensorless schemes [2]-[5]. The modeling of
dq-axis cross-coupling magnetic saturation, the investigation of
its influence on the accuracy of the rotor position estimation in
1 -4244-0743-5/07/$20.OO ©2007 IEEE
214
back-EMF based sensorless control method are presented in
section II. In section III, the errors in the estimated rotor
position which result when the influence of dq-axis
cross-coupling magnetic saturation is neglected is analyzed
analytically and predicted by finite element analysis for various
d- and q-axis currents. Finally, the performance of the proposed
improved extended back-EMF based sensorless control method
is demonstrated experimentally in section IV.
II.
MODELING OF BLAC MOTOR AcCOUNTING FOR DQ-Axis
CROSS-COUPLING MAGNETIC SATURATION AND IMPROVED
EXTENDED BACK-EMF BASED SENSORLESS METHOD
The 3-phase voltages of a BLAC motor are given by:
Fva1
d Vldt
0 0 ia
R 0 i 1+1 dw Idt
(1)
b
IIsi
0 0 RS icL
dVfcldt
LvC
where va, vb, vc ib, ic, V1a, Vib and are the 3-phase voltages,
currents, and flux-linkages, respectively, and Rs is the phase
.
'
'
a
L
Rs
ia,
rsi
(2)
0 ]Fid 1 F dvddt - V'qV
d Vf Idt + Co,fd
L
s q
r
where vd, vq, id, iq, Vid, and qiq are the d- and q-axis voltages,
currents, and flux-linkages, respectively, and Wr is the rotor
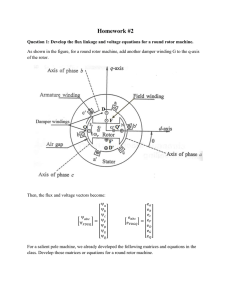
electrical angular velocity. Fig. 1 shows the predicted d- and
q-axis flux-linkages of a BLAC motor which has an interior PM
rotor, as calculated by finite element analysis, for various d- and
q-axis currents.
Clearly, qI/d, fqi dqdid/t and dfqiqdt vary non-linearly with the
d- and q-axis currents, due to the influence of magnetic
saturation. They can be written as [5]:
FVd1 FRs
Kvq L °
q
q=
Ldqd + Ldqq + V'm
d
Vf q
Ex =rwVm +(WrLd-WrLq+Lqdp+Ldqp)id
(3)
+(LqP-LdP+WorLdq +CorLqd )'q
L,,i,, + Lqd id
=
Ldh .pi
a/d ddai
+ Vd dlq
Sdl/d
Oid
|dt
ai
dt
dt
+L
Pq
As the actual rotor position, ,r, is not available in a sensorless
scheme, (5) is required to be transformed into the estimated
dq-axis reference frame, Ore, i.e.
pid
[d ]=T[d]
dqh
=Lqh Piq + Lqdh
l w = eq+
FR5 +LdhP-r Ld -cr Lq +LdqhP ]pl1 F" l+F 1
TL qL -LdqhP Rs +LdhP-fWrLqd I
iq ]LEex I
Rs+LdhP-°CrLqd -4OrLq+LdqhP 'ld +FEexde1
where Ld, Lq, Ldq and Lqd, are the d- and q-axis apparent self- and
mutual-inductances, Ldh, Lqh, Ldqh, and Lqdh are the d- and q-axis
incremental self- and mutual-inductances, respectively, and
p=dldt.
cWrLq -LdqhP
I~~~~~~~~~~~~~~~~~~~ Td TL Ir
q
o025-
(- I q=4A
- Iq=3A
--
u
2
Iq:A
I q=OA
-0 (). 1.
x
___
1____
-2
_____
_____
_____
_
4Eecd =Eex sinAO
Eex_q
0
d2A
Id=lA
Id=-2A
-0.2
-4
-3
1t
-2
1
0
q-axis current (A)
(b) q-axis flvux-linkage,
2
3
e
In the steady-state and during slowly changing operational
conditions, the derivatives of the d- and q-axis currents are
sufficiently small, i.e., pjde&:zf piqe&zO, that the relevant terms in
(9) can be neglected. Therefore, (9) becomes:
Id=-3A
-A
and Eex q,
0
I ~------------------
d,
<fEex d =Vd -(R + LdhP WrLqr)i
+(d rq
Pr
E~~~~~~~~~~~~~~~ex_q
Lq(
Lq-di
i _L(9)
=Vvqev-(R,
+LhpP-COrLqd
-R +dh
r(
(Lq
LdqhP)d~
)iqei-(Cor
Id=3A
a)
--
=Eex cosAO
shown in (8), the error can be calculated from Eex
where:
o + ~~~~~~~~~~~~~~~~~~Id
A. t
(8)
where AO_O=re'r is the error in the estimated rotor position. As
3
o
cu
_Eexq
cos(AO) sin(AO)
-sin(AO) cos(AO)
T
_____
2
d-axis current (A)
(a) d-axis flux-linkage, lgd.
0. 2
.cj,
jq
rotor reference frame, and T is the rotation matrix, which is
given by
-~ ~ ~ ~ ~ ~ ~-~ Iq=2A
_
--
O.
x
Rs +Ldhp- WrLqd
(
where Vde, Vq ide iqe, Eex d and Eex q are the d- and q-axis
voltages, currents, and extended back-EMFs in the estimated
0. 3
x().
(6)
E
*Rjd +r
,
{Eexd
=Vd -Rs
(Lqlq +Lqdld)
E
Ve-Re ( Lqi-Lqd )
4
e
.
Fig. 1. Finite element predicted d- and q-axis flux-linkages for various d- and
e
*e
(1 0)
q-axis currents.
A0=arctan(Eex_d /Eex_q )Eexd /Eex_q
Equations (3) and (4) can be substituted into (2), and the
dq-axis voltage equation re-written as:
The estimated rotor position error, AO, which is calculated
from (10), can then be used to correct the estimated rotor
position, Ore, and speed, tre. Clearly, when Eex d iS forced to
dl
s
Lvq j L
dhPP-
Lrqd
9r Ld + Lc,dh P
0
1'd LiLn+L
+LdqhP RirL
+ ° 1
RS + Lqh p + 'rLdq ]Liq j LWrY
r Lq
zero in the extended back-EMF sensorless control scheme, the
estimated rotor position is equal to the actual rotor position, i.e.
m
O
=ls+dh,PWarLqd -°rLq +LdqhP 1kd
RS +Ldh p-°rLqd LIq LEexij
L W#rLq-LdqhP
where Ee is the xtended
A0
III. ANALYSIS OF ESTIMATED ROTOR POSITION ERROR IN
ack-EMF,EXTENDED BAcK-EMF BASED SENSORLESS METHOD
In theory, in the extended back-EMF based sensorless control
215
scheme, the error in the estimated rotor position will be zero if
accurate values for all the parameters in (10) are used. However,
o
the accuracy of the parameters Lq and Lqd is influenced X
significantly by the d- and q-axis currents which cause the level
*
of magnetic saturation to vary. Lq and Lqd can be calculated from
the d- and q-axis flux-linkages:
Ld (ld)
d (dld)/l'd
=
L,)
X(Oi)i
q0q) Vq("I'qq
10
|
B
I ,a;
id=lA
X
E
°:
=
<
2
0u
C
u
' Es-id=lA
0
E2
,
a
(U
-id GA
:4 ~~~~~~~~~Uid=-tA
Z ZZ o
-id=2A
-4
- id= 3A
L
QLQ
(1I2)
-10
_4
-2
0
2
Fig. 2. Finite element predicted apparent self- and mutual- inductances, Ld, Lq,
Ldq and Lqd.
~+In the conventional extended back-EMF method [2], the
d-axis extended back-EMF in the estimated rotor reference
frame is calculated and controlled to be zero, i.e.
-r
-
VdRs4i+WrLq(OnqN) 0e
1
-1
0
d-axis current (A)
2
3
(a) Ld
60
(13)
As shown in (12), since the influence of magnetic saturation
on the q-axis and dq-axis cross-coupling are neglected, an error
in the rotor position estimation will be introduced in the
conventional extended back-EMF based sensorless scheme.
Equation (13) can then be substituted into (10) to predict the
error in the estimated rotor position using the method proposed
0
-2
4
q-axis current (A)
(d) Lqd
~_
-3
4
'+id=2A
3
x
-in[2], viz.:
(D
0
a0
2
-U-id 3A
I
10
-s
0
a)
0
30-
I20
E
i d =2A
(c) Ldq
40
a)
-
d-axis current (A)
10
where iqN is the rated q-axis current.
A
--id AA
10to
4
Lq =Lq (O, iqN)=Xq (O, iqN ) I iqN
(x
4.t
id=3A
The finite element predicted variation of Ld, Lq, Ldq and Lqd,
for the motor under consideration, are shown in Fig.2.
Since Ld and Ldq are not used in the conventional extended
back-EMF based sensorless scheme, (10), their prediction
accuracy will not affect the accuracy of the estimated rotor
position. The apparent self- and mutual-inductances in (10), Lq,
and Lqd, are used to predict the q-axis flux-linkage,
1Iq=Lqiqe+Lqdide. In [2], Lqd is neglected and the constant
apparent self-inductance Lq at i,1O and iq=iqN is used, i.e.:
IN
--id=2A
_
Ldq(id,iq)=[Jd(id,iq) Vd(id,O)]/Iq
Lqd ('d"'q)=[q('d"'q) /q(0,q)]lId
&
id=3A
--
U
*:
30
.cn
10
Xu
>
0
40
~~~~~~~~~~~~~~~~~~~A0=j
[Lq (OQ, -L, (,IqN)i + L,6i JI(Eevq)
( 14)
When the effect of magnetic saturation on the q-axis, and its
variation with the q-axis current is considered, the apparent
self- inductance, Lq, in (10) is given by [3][4]:
4
-
X
Lq=Lq(0riq)=Xq(0riq)liq
(15)
4
-4
-2
0
q-axis current (A)
(b)Lq
2
In [3][4], the d-axis extended back-EMF in the estimated
rotor position reference frame is calculated and controlled to be
zero,i.e.:
4
Vd-Rsicd+WrLi =e 0
216
(16)
However, the effect of dq-axis cross-coupling was neglected
in [3] and [4]. Thus, equation (16) can be substituted into (10) to
obtain the error in estimated rotor position using the method
(-id
proposed in [3] and [4], viz.:
AOLqdI~~~~~~/(Eexq/Wr)
20
o m 5
° )
l
-U-id 3A
2A
a
0~~~~~~a
(17)
@id=-GA
-Mow
e
-a
)
id=-tA(u
Uid=tA
-4- id=2A
~
Therefore, when the conventional extended back-EMF based
0
0-o
1
sensorless control schemes which were described in [2] [3] and
Aid=3A
m 15
[4], in which the influence of dq-axis cross-coupling magnetic
20
saturation was neglected, are employed, the error in the
estimated rotor position can be predicted from either (14), when
-4 -3 -2 -1 0 1 2 3 4
q-axis current (A)
Lq is assumed to be constant, i.e. Lq=Lq(O, iqN), or from (17)
when Lq varies with saturation, i.e. Lq=Lq(O, iq), using the finite
(c) Lq=Lq(O, iq), Lqci-Lqds, RMS(OreOr)=1 .20
predicted error in estimated rotor position with various delement predicted winding inductances which were shown in Fig. 3. Variation of for
q-axis currents, conventional and proposed extended back-EMF based
Fig.2 Theerror
peievraoothand
Fig.2. The predicted variation of the rotor position
for sensorless
schemes.
each scenario for the motor under consideration is shown in
Since the variation of Lqd with id and iq is a complex function
Figs. 3(a) and (b), respectively. As will be seen, the larger the dand q-axis currents, the larger the error in the estimated rotor which is difficult to implement on a DSP, a much simpler
position. In addition, it will also be noted that, for this particular approach is proposed in which an approximation function, Lqds,
motor, the accuracy of the estimated rotor position is not is used to represent the variation of Lqd with id and iq, viz.
improved by accounting for the influence of the variation in
d 0
0
(18)
magnetic saturation on the q-axis with the q-axis current.
Lq
2
qds
l-°0002i,
id
>
°
20
C)
=
a)
o
C/)
10r
°
0
cn 0
-0 a)
LL o -5
ia10
--
--
~
-,_ id
2A
1 Dfor the motor which is being considered.
The d-axis extended back-EMF in the estimated rotor
reference frame is then calculated and controlled to be zero as:
Vd -RSi
sd +r(Lq<$+LqSi)
q q
qdsd-4id G
~ ~ ~ ~~~Uid=tA
--- id=2A
l
)i /(Eex q/Wr)
/AO=(Ld eLds
2()
-4
-3
-2
-1
0
1
q -axis current (A)
2
3
(20)
The predicted variation in the error in the estimated rotor
position is now reduced significantly, as shown in Fig. 3(c).
4
(a) Lq=Lq(O, iqN), Lqdt=OMH, RMS(Oe_Or)=3. 10
tn
20
IV. EXPERIMENTAL RESULTS
'--,
-id=3A
10 i
0- - id 2A
oro: .-
o°
LL
(19)
Equation (19) is then substituted into (10) to obtain the error
in the estimated rotor position when the cross-coupling, Lqd, is
approximated by Lqds, i.e.:
id=3A
i
o 20
15
U-- -id=-3A
0
~~ ~
o
E
-
--
',
0
C:
_
-
-5
!=
IA
_
--------
The error in the estimated rotor position, which results when
the conventional and proposed extended back-EMF sensorless
schemes are employed, has been measured experimentally, with
reference to the actual rotor position as measured by a 1024
pulse-per-revolution encoder. As stated earlier, the BLAC
motor has an interior PM rotor, its parameters being given in
Table I. The sensorless controller is implemented on a
TMS320C31 DSP, the frequency of the AD sampling rate, the
control loop, and the PWM switching all being 5kHz. The error
in the estimated rotor position was measured for various d- and
--A - id=
- id=(A
id=lA
10
-
Id 2A
15
220
-4
1
0
2
3
q2 -1 current
q-axis
(A)
(b) Lq=Lq(O, iq), LqfrOmH, RMS(OreO0r)=3.3o
-3
4
q-axis currents. With the conventional extended back-EMF
based sensorless scheme, in which the q-axis apparent
inductance, Lq, is assumed to be constant and the influence of
dq-axis cross-coupling effect is neglected, the rotor position
217
-
estimation error is large, Fig. 5(a), e.g. 16.60 at id=3A, iq=4A,
the root mean square (RMS) error being 4.3°. As will be seen by
comparing Figs. 5(a) and (b), when the influence of magnetic
saturation on Lq is considered in the conventional extended
back-EMF based sensorless scheme, there is little, if any,
improvement in the accuracy of the rotor position estimation
accuracy, e.g. 15.50 at idh3A, iq=4A, with the root mean square
(RMS) error being 4.4°. This is consistent with the earlier
predictions.
The cross-coupling between the d- and q-axes due to
magnetic saturation can be accounted for directly in the
extended back-EMF sensorless scheme by using (18) in(10), i.e.
(19). In this case, the RMS error in the estimated rotor position
is reduced significantly, to -2.0°, Fig. 5(c), the small error being
due to the inaccuracy of the finite element predicted apparent
inductances and also the approximation in (18).
Alternatively, the error in the estimated rotor position due to
the neglect of the dq-axis cross-coupling effect can also be
compensated for indirectly, by firstly assuming Lqd to be zero
and then compensating for the resulting rotor position error
according to the measured error, Fig. 5(b), which, for simplicity,
is approximated by (21).
TABLE I PARAMETERS OF BLAC MOTOR
Rated voltage (peak)
158V
Rated current (peak)
4.OA
Rated power
0.6kW
Rated speed (nN)
1OOOrpm
Rated torque
4.ONm
6
Pole number (2p)
Stator winding resistance (R,)
6.OQ
20
_,
i
o
,, ,
B °
0s
°°_.. -5
° a)m a)
N
-_-id=-3A
-
-
s10
LU
__
-
W- id=0A
d=IA
-d
L
-20
id=-2A
L
q4-axis
current (A)
(a) Lq=43mH, Lqd=OmH, RMS(OreOr)=4.3°
0~~~~~~~~~~~~~~~~~~~~~C-U) 0
I=-2
U)U
___o
cn
|
|
C]|.'f.fft
I I i
^
-
3
20
-4
-3
-2
-1
0
2
2 31
3
1d =0A
4
4~~~01d=3
current (A)
~~~~~~~~~~~~~~~~~~q-axis
1<
(b) Lq=5l~2liqelmH, LqirOmH, RMS(Ore-Or)=4.4o
Fig. 4. Extended back-EMF based sensorless scheme with compensation for
rotor position error due to cross-coupling.
E
CKO
id~ >U
t-
--(
-
>0=-2)
where Ocis the value of the rotor position compensation and Kr ' U) -i=l
is the compensation factor. For the BLAC motor under
_
_
+dO
consideration, K7. is approximated from Fig. 5(b) as K7 0.9 0/A2.
n
=d2
The corresponding error compensation scheme is shown in
>. 50;
id3
Fig.4. In this case, information regarding Lqd is not required,
L X 10
since the error which is to be compensated for, i.e. Fig.5(b), is
-ltX
- _______
measured directly in advance. When such a compensation
-20
-3
-2
-1
0
1
2
3
4
scheme is employed, the RM\4S error in the estimated rotor
-4
position is reduced to 2.20, as shown in Fig. 5(d).
q-axis current (A)
The foregoing analyses clearly indicate the significance of
qmH
when
c)L5l2/qe-mH, Lq sapoiae y(8,ie
/d<OA,(0-t) .
dq-axis cross-coupling magnetic saturation on the accuracy ofLq2qeHwn/dA,RSrer).O
in the extended back-EMF sensorless scheme, and validates the
proposed improvement.
218
20
a,)
r)
10
t-
-id=-3A
--
n o)
CL C
id=2A
-5
a
0
mU
-_
10
Xd=0A
,)-15
X
-20
-4
-3
-2
-1
0
1
q-axis current (A)
2
3
4
(d) Lq=51l2liqelmH, Lqch0mH and error is compensated for by (21),
RMS(Dre
r)d2.2o
Fig. 5. Variation of measured error in estimated rotor position with d- and q-axis
currents.
V. CONCLUSIONS
The conventional extended back-EMF based sensorless
control method has been improved by accounting for
cross-coupling between the d- and q-axes and magnetic
saturation by introducing an apparent mutual winding
inductance for a permnanent magnet brushless AC motor with
magnetic saliency. The error in the estimated rotor position
which arises when cross-coupling and magnetic saturation are
neglected has been analyzed analytically, predicted by finite
element analysis, and confirmned by measurements, for various
d- and q- axis currents. Measurements confirmn that a significant
improvement in the accuracy of the estimated rotor position
estimation can be achieved by using the proposed extended
back-EMF based sensorless technique.
[1]
[2]
[3]
[4]
[5]
[6]
REFERENCES
J.H. Jang, S.K. Sul, J.I. Ha, K. Ide, and M. Sawamura, "Sensorless drive of
surface-mounted permanent-magnet motor by high-frequency signal
injection based on magnetic saliency," IEEE Trans. Industry Applications,
vol. 39, no. 4, pp. 1031-1039, 2003.
Z. Chen, M. Tomita, S. Koki, and S. Okuma, "An extended electromotive
force model for sensorless control of interior permanent-magnet
synchronous motors," IEEE Trans. Industrial Electronics, vol.50, no.2, pp.
288-295, 2003
5. Morimoto, K. Kawamoto, M. Sanada, and Y. Takeda, "Sensorless
control strategy for salient-pole PMSM based on extended EMF in
rotating reference frame," IEEE Trans. Industry Applications, vol.38,
no.4, pp. 1054-1061, 2002.
H. Kim, M. C. Harke, and R. D. Lorenz, "Sensorless control of interior
permanent-magnet machine drives with zero-phase lag position
estimation," IEEE Trans. Industry Applications, vol.39, no.6, pp.
1726-1733, 2003.
T. Aihara, A. Toba, T. Yanase, A. Mashimo, and K. Endo, "Sensorless
torque control of salient-pole synchronous motor at zero-speed operation,"
IEEE Trans. Power Electronics, vol. 14, no. 1, pp. 202-208, 1999.
B. Stumberger, G. Stumberger, D. Dolinar, A. Hamler, and M. Trlep,
"Envaluation of saturation and cross-magnetization effects in interior
permanent-magnet synchronous motor," IEEE Trans. Industry
Applications, vol. 39, no. 5, pp. 1264-1271, 2003.
219