Regularitybased functional streamflow disaggregation: 1
advertisement

WATER RESOURCES RESEARCH, VOL. 44, W02420, doi:10.1029/2004WR003724, 2008
Regularity-based functional streamflow disaggregation:
1. Comprehensive foundation
P. Carl1 and H. Behrendt1
Received 9 October 2004; revised 8 October 2007; accepted 30 October 2007; published 14 February 2008.
[1] An integrated, largely nonprobabilistic, calibration-free approach is proposed to
identify, estimate, evaluate, and attribute conceptual components of a streamflow time
series. We assess its gross functional aggregation from the signal structure alone by
consistently exploiting elementary constraints. Starting from the separability concept of
linear operator theory, cross connections are revealed of such a blind functional
streamflow disaggregation to qualitative dynamics. The algorithm is initialized by a first
guess of regular behavior using singular-system analysis (SSA). To approach the regular/
singular borderline of the data and to separate a fast flow from total runoff, this
(probabilistic) SSA mode is transformed into a lower envelope to the series via iterative
cubic spline interpolation (CSI). Repeated CSI yields a hierarchy of lower envelopes that
piles up part of a transient component and converges into a slow one. A lower bound
is constructed as an instantaneous low flow using the leading SSA eigenvector. We
demonstrate the method for highlands river stations, compare its results with those
from distributed hydrologic models, and discuss attributions to overland flow,
interflow, and base flow. For independent evaluation we resort to singularity-based
multifractal analyses.
Citation: Carl, P., and H. Behrendt (2008), Regularity-based functional streamflow disaggregation: 1. Comprehensive foundation,
Water Resour. Res., 44, W02420, doi:10.1029/2004WR003724.
1. Introduction
[2] Both assessment and projection of water availability
or quality and freshwater induced landscape transformation
are crucially dependent upon knowledge about the dynamic
pathways that water takes after being intercepted at the
surface. Distributed hydrologic models are capable, in
principle, of providing the desired information [e.g., Beven,
2001]. They represent the direct approach to water mass
transduction A, from precipitation f to discharge g by
virtue of geomorphology and anthropogenic impress of
the basin, B:
g rj ; t ¼ Af f ðx; tÞg ¼ GBf f ðx; t Þg ¼ Gfgðx; t Þg
ð1Þ
(G is streamflow aggregation, g is the vector of flow
components, x is space, t is time, and r (rj) is river network
coordinates (of station j)). Soils, rocks, vegetation and the
drainage network form a multi(ple)-fractal material carrier
c(x) of infiltration, percolation, and of a progressively
concentrated basin-wide flow dynamics, g(x, t) = g(c(x), f(x,
t)) = (B {f (x, t)}. The final aggregation G is brought to pass
then by processes such as water table fluctuation within
range of the river bank and downstream convolution along
the network.
[3] Calibration of a watershed model, i.e., parameter
identification from aggregated data (hydrographs, flood
1
Leibniz Institute of Freshwater Ecology and Inland Fisheries, Berlin,
Germany.
Copyright 2008 by the American Geophysical Union.
0043-1397/08/2004WR003724
volumes, recession slopes, low flow), is a genuine inverse
task. It is rendered ill-posed [e.g., Dietrich et al., 1993] in
case of overparameterization and/or equifinality, i.e., if the
data support different choices of model physics [Jakeman
and Hornberger, 1993, 1994; Chapman, 1994; Steenhuis et
al., 1999a, 1999b; Michel, 1999; Beven and Freer, 2001].
Most advanced environmental models are overparameterized. As a consequence, operational performance does not
necessarily parallel model complexity [Perrin et al., 2001].
Resorting to a suite of independent, direct and inverse
methods is thus indicated.
[4] A direct (rainfall-runoff) approach of whatever complexity, even as a probabilistic time series model [Jakeman
et al., 1990; Young, 2001], requires calibration and is
bound to unbroken sets of areal daily precipitation, at
least. The latter may be a problem, not only for historical
records or watersheds with low rain gauge density. Moreover, both surface and subsurface parallel flows [Young,
1992] are hard to calibrate in a model, and field measurements are too costly as to become routine. Inverse identification and separation of conceptual components, which
dates back to Barnes [1939], remains thus justified. This
refers to another class of inverse problems: data disaggregation into consistent sets of spatial, temporal, functional
or spectral resolution.
[5] Here we outline a minimalistic approach to what we
call functional streamflow disaggregation (FSD). The term
‘‘disaggregation’’ is extended beyond its common spatiotemporal use, to include the (complete, balanced, physically
founded) inversion of the entirety of hydrologic processes G
making up parallel flow aggregation. We use ‘‘decomposition’’ as a technical term and recur on ‘‘separation’’ for
W02420
1 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
single components (a disaggregation may involve two or
more separations).
[6] As an Archimedic point, we adopt the separability
concept of the theory of linear operators. Streamflow at
catchment outlet is viewed as an aggregate of discernible
modes gk(r, t), with individual functional signatures borne
in distinct function subspaces Gk. To resort to signature k,
the range of a separating inversion T k = (G
1)k must
therefore belong to the respective subspace, k = {T k} Gk. Sound functional disaggregation may also bear a
spectral one. Blank practice using customary spectral tools,
in contrast, may fail to yield functionally relevant results
in a hydrologic context. Fourier domains, for example,
overlap for classical base flow, interflow and overland flow
[Spongberg, 2000]. Even the multiscale wavelet transform
(WT) [e.g., Mallat, 1999] and the data-adaptive singularsystem analysis (SSA) [Vautard and Ghil, 1989] show
unspecific responses.
[7] In section 2 we trace out inferences from our separability axiom, pose them into the hydrologic context, and
relate the approach briefly to other methods and fields.
Technical aspects and the algorithm are sketched in sections
3 and 4. Single-station demonstrations are given in section 5
for three highlands river catchments (Danube and Elbe
basins). We provide close comparison with the rainfallrunoff approach using distributed hydrologic models: Large
Area Runoff Simulation Model (LARSIM) [Bremicker,
2000], Soil and Water Assessment Tool (SWAT) [Arnold
et al., 1998] and Soil and Water Integrated Model (SWIM)
[Krysanova et al., 1998]. Section 6 offers a summary;
technical details are found in Appendix A.
2. Functional and Spectral Disaggregations
2.1. Conceptual Alignment
[8] Causations of hydrologic modes (weather and climate
variability, land use, water management, geomorphology,
vegetation) may bear mutually extinguishing (‘‘destructive’’) interference. By virtue of mass conservation, a
streamflow integrates this in a strictly nonnegative, additive
way that outlaws any counterbalance. Though individual
flow regimes may be highly nonlinear, aggregation of
parallel flows is thus a linear operation on nonnegative
entities that show ‘‘constructive,’’ nonextinguishing interference. Excepting interactive anthropogenic impacts, selective losses, or trigger effects, this feature traverses to
catchment outlet.
[9] We split G into lateral flow concentration from the
basin X to the river network R, P ?{g(x, t)}, and downstream convolution, P k{g}(rj, t), across the network. A set
of flows g(xj, t) from the catchment of station j is thus
aggregated into local streamflow by virtue of two projectors
in sequence,
g rj ; t ¼ G g xj ; t ¼ P k P ? g xj ; t ;
ð2Þ
which are linear, but a priori neither mutually orthogonal nor
commuting ones. We have also not excluded mixing at this
point, i.e., exchange between different flow components.
[10] The integral, spatially and functionally aggregated
runoff at catchment outlet (the ‘‘output’’) is a central spot in
W02420
the terrestrial water balance. Areal precipitation, the
‘‘input,’’ cannot be directly measured as yet. Which part
of upstream information (Rj, c(xj)) becomes manifest in
g(rj, t) depends to a great deal just on the spatiotemporal
and functional features of rainfall f, however. This relates to
the question if all relevant hydrologic modes are sufficiently
excited over a study period [Young, 2001], i.e., if subspaces
Gk are ‘‘filled.’’
[11] Estimates of effective rainfall by inversion of the
left-hand part of (1) bear assumptions (of course), are
nonlinear and refer originally to overland flow [Chow,
1964]. The linear component structure at catchment outlet
may be assessed without such a closure, thus avoiding its
nonlinear detour (and hypotheses) to prepare rainfall-runoff
analysis and associated functional disaggregation. Runoff at
location rj is viewed as a local sum of K conceptual modes
here,
K
X
g rj ; t ¼
gk rj ; t ;
ð3Þ
k¼1
which individually combine upstream contributions. We
replace the unknown lateral
P aggregation P ? thus withb a
b ? = , and impose commutability, G
=
fictitious local one, P
b kP
b? = P
b k. By virtue of this hypothesis, inversion T ,
b ?P
P
which aims to (re)construct a vector of local flows,
g rj ; t ¼ T f g g rj ; t ;
ð4Þ
b ? alone. Finally, FSD operator T
becomes a partial one of P
must be reducible, i.e., settle to partial inversions T k over
distinct function subspaces Gk (rj suppressed henceforth),
gk ðtÞ ¼ T k f g gðtÞ ¼ T fgk gðt Þ
ð5Þ
(cf. also section A1). This consequence of the separability
demand [Achieser and Glasmann, 1981] is fundamental to
the present outline. Assumptions in the back as just quoted
preserve separability in ruling out mixing in the water body
by friction, turbulence, jets etc.: Water becomes separately
transduced and convolved (‘‘routed’’) in its functional
modes. Note that (4) comprises embedding, a basic task in
dynamic systems analysis from time series [Sauer et al.,
1991].
[12] We do not use a delay system as data model but bear
the ‘‘convolutive’’ nature of streamflow aggregation in
mind by an autocovariance-based, adaptive initialization
using the SSA. Given the smoothing effect of convolutions
[e.g., Chapman, 1985], the strategy developed here is
basically rooted in a small set of inversions T k for regular
streamflow behavior.
2.2. Notes on Unit Hydrograph Approaches
[13] Integral transforms are clearly among the candidates
for our operators T k. The (one-sided) Laplace transform
(LT) is archetypal of the unit hydrograph (impulse response function (IRF)) theory, a central concept in hydrology [e.g., Dooge, 1959; Rodrı́guez-Iturbe and Valdés,
1979]. The catchment response (instantaneous unit hydrograph (IUH)), which may be formulated as a convolution
integral, is the target of hybrid metric-conceptual (HMC)
2 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
rainfall-runoff modeling [e.g., Jakeman et al., 1990;
Young, 2001]. This use goes beyond the original dedication of the IUH to direct runoff and flood forecasting. The
LT background of the approach bears the assumption of
initially empty storages [e.g., Dietrich et al., 1993],
though, which seems best justified in the original alignment of the theory. Still, HMC models comprise established approaches to modern hydrologic data analysis. Up
to five ‘‘unobserved components’’ have been isolated, for
example, when recruiting meteorological information in a
data-based mechanistic (DBM) study of the Coweeta
experiment [Young, 2001].
[14] Another cautionary note concerns the nature of the
LT itself. It has a limited information capacity [McWhirter
and Pike, 1978], like many integral transforms (section A1),
and its short-scale results may be corrupted by noise.
System identification (algebraic form of the IUH) might
become selectively influenced, so that calibration and determination of effective rainfall may be imputed. Probabilistic HMC modes do not generally preserve nonnegativity
and may show functional singularities (‘‘edges’’) even in
their slowest scales [Jakeman et al., 1990]. The latter might
reflect a tradeoff between stability and accuracy when
inverting the convolution integral. To what extent such
functional features are tolerable depends on the objectives
of a study. A variety of causes for potential data errors
notwithstanding, does the method we present strictly consider the water balance, a useful property in the search for
signatures of nonlinear dynamics and when applying FSD
within the context of distributed hydrologic modeling.
[15] In an earlier, inverse approach, Hino and Hasebe
[1981] used an IRF kernel-based, linear filter for both
rainfall-runoff analysis and streamflow disaggregation.
Their conceptual view on daily (hourly) runoff as directly
driven by white (colored) noise effective rainfall, component by component, implies a rigid relationship which is a
generic feature of the impulse response approach to streamflow analysis:
g k ðtÞ ¼ Affk gðt Þ:
ð6Þ
The problem is delegated this way to another type of inverse
tasks, input identification. Lacking the typical shape of
recession [Mitosek, 2000], the concept of white noise –
driven streamflow may hardly apply to daily records from
larger catchments, however. Base flow separations by Hino
and Hasebe [1986] for single storm, hourly records are
indeed more convincing, in light of response criteria as
given by Nathan and McMahon [1990], than their
continuous, seasonal analyses of daily data are. A concise
survey of base flow methods is given by Furey and Gupta
[2001] who introduce a physically founded generalization
of time domain filtering. It does not root in the assumption
of unique recession or frequency signatures of individual
components but rests upon availability, quality, and
consistent sampling of rainfall.
[16] In short, cutoff frequencies, timescales or compound
mechanistic quantities make up customary criteria for the
inverse identification of flow components. There remains the
question of whether those constituents of a conceptual
hydrologic notion might not bear more qualitative signatures
as well, say, as in the work of Sivakumar et al. [2001], who
W02420
propose temporal rainfall disaggregation on the basis of selfsimilarity arguments borne in the qualitative theory of
dynamic systems.
2.3. Conceptual Cross Connections
[17] Reasoning for a qualitative, nonprobabilistic FSD
approach may refer to established facts. A theorem by
Lebesgue states that every ‘‘charge,’’ or real function z(t)
of bounded variation, admits a unique representation z(t) =
z ac(t) + z sc(t) + z d(t), where z ac, z sc and z d are its absolutely
continuous, singular continuous (‘‘noise’’) and discontinuous (step function) parts, respectively [Berezansky et al.,
1996]. For ‘‘masses’’ m(t) (or nonnegative charges), the
discontinuous part becomes the point mass mp [Reed and
Simon, 1972]. Another conceptual template concerns the
topological classification of strange attractors into global
structure (bounding tori), intermediate one (branched manifolds) and fractal fine structure [Tsankov and Gilmore,
2003]. The relevance of deterministic chaos in hydrology
has been highlighted by Sivakumar [2000, 2004]. Note also
that the two universal classes of dynamic behavior, regular
and chaotic, leave space for intermediate (‘‘pseudointegrable’’) systems.
[18] To render this qualitative background practicable we
may distinguish streamflow components gs(t) and gt(t) on
slow (geomorphoclimatic) [Rodrı́guez-Iturbe et al., 1982]
and transient (‘‘geomorphosynoptic’’) manifolds, Gs and Gt,
from fast flows gf(t) comprising the system’s singular
behavior. The conceptual view of comprehending singular
dynamics in a fast mode, leaving more smooth transient and
slow ones, has been motivated above with a view on
convolutions. Excepting small and geomorphologically
simple catchments, as well as hydraulic effects (i.e., focussing on the motion of water in our conceptual view on
streamflow components here), spikes, edges and ‘‘jumps’’
in precipitation should not penetrate the hierarchy of hydrologic modes. Some sort of Nash cascade [Nash, 1959] is
certainly found in most catchments. Though this is admittedly a simplifying picture, flow singularities that may
emerge in a ‘‘responsive’’ vadose zone are not bound to
external forcing [Faybishenko, 2004].
[19] In contrast to (6), the left part of (1) is thus
specified as
gk ðtÞ ¼ Ak f f gðt Þ
ð7Þ
(k = s, t, f ). Reducibility is less obvious for the direct,
basin-wide process than for the local, inverse case (5), i.e.,
Ak{f} 6¼ A{fk} in general. In reducing the basin-wide
bB
b to the identity operator I, i.e.,
water mass processing G
to throughflow unaffected by the material carrier c(x), the
equal sign would virtually dislocate the scene of hydrologic
mode generation into the atmosphere. Though (3), (4) and (5)
pose a limited task as well (mode generation at catchment
outlet, in essence), this conceptual boldness is avoided. Given
the variety of flow regimes they offer [e.g., Faybishenko,
2004], unsaturated soils or fractured rocks, for example,
might well be viewed as hydrologically active media.
[20] Like any mass, streamflow is a ‘‘measure’’ because
of its nonnegativity and additivity. Orthogonal runoff modes
may thus hardly exist. Strictly, this excludes most customary methods from use in hydrologic inversion. Differential
streamflow hydrograph analysis, however, matches our aim
3 of 12
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
W02420
to take bearing on borderlines of distinct dynamic behavior.
To this end, we design lower envelopes to the data, and refer
thus to their measure property (cf. sections 3 and A4). Related
concepts in image processing include ‘‘slope transforms’’
and ‘‘minimal convolutions’’ [Maragos, 2001]. Note also a
solid conceptual link to potential theory [Kishi, 1964].
2.4. Basic Structures of Consistent Data Reduction
[21] Theorem (5) is an adequate abstraction of our
hydrologic task. We seek a complete inversion (4) that
obeys (5):
g ðt Þ ¼
X
gk ðt Þ ¼
k
X
T k f g gðtÞ:
ð8Þ
k
Conceptually, each T k bears a (back)projection P k; that is,
property (5) specifies as T k{g}(t) = P kT {g}(t) = gk(t) 2 Gk.
Commutability P kT = T P k is a condition of reducibility of
T [e.g., Achieser and Glasmann, 1981], and for the unknown
P k we may fix ‘‘idempotence’’ (P 2k = P k) at this point.
[22] For a reducible transform T , subspaces Gk are
invariant manifolds: Application to elements gk(t) 2 Gk
reduces T to T k, thus reproducing elements of Gk. Projector
P k represents the one, ideal transform that leaves gk(t) even
unchanged (a manifestation of its idempotence). P k is a
special case of those T ks which generate just a ‘‘shadow’’ of
the data object, i.e., preserve its functional signature:
T k fkn lkn fkn ¼ 0:
ð9Þ
This homogeneous (eigen)equation generalizes theorem (5),
i.e., relaxes our reducibility condition. It bears the elementary
expression of projective invariance under operation of T k:
Among all elements of Gk, eigenfunctions fkn are just those
exceptional ones which remain invariant, save scaling by
k
, a
their eigenvalues lkn. Depending on its set {lkn}nn=1
(nondegenerate) partial inversion T k yields a projectively
scaled, topologically equivalent image of the target component. Preservation of functional signatures and phase space
topology, a compelling consequence of separability, is just
what we demand of a disaggregating streamflow inversion.
[23] We are lead now to the spectral complement of any
functional, time domain view. Resorting to (8),
g ðt Þ ¼
XX
k
lkn x kn fkn ðt Þ
ð10Þ
n
provides a functional and spectral (de)composition
in one
k
(cf. section A1). The set {lkn, fkn}n1 of eigensolutions
comprises the details of how the phase space topology of
(sub)system k is reflected by the image we have of its
dynamics.
[24] An essential extension, as with the SSA, admits of
nonstationary contributions by individual eigensolutions,
i.e., of time-dependent projection coefficients x kn (sections
A1 and A2). The more fundamental inhomogeneous generalization,
T l ffg :¼ T ffg lf ¼ y;
ð11Þ
poses our task into its broader context again, including the
mixing problem. The ‘‘sea’’ of solutions to (11) that provide
W02420
irreducible maps between distinct function spaces (Gf !
Gy) is covered by the resolvent set r(T ) of corresponding
ls. These solutions are also called ‘‘regular,’’ whereas the
complementary set of ls, the spectrum s(T ), comprises all
‘‘singular’’ (somehow exceptional) ones. Among them is
the eigensystem {li, fi}n1 of T where a symmetry, yi fi,
rules out mixing, i.e., restores reducibility.
[25] The implied target of SSA is the singular system of
T , {li, fi, yi}s1. This set of s solutions has a ‘‘mirror
image’’ to (11), T *{y} ly = f, by another, adjoint
operator T *. It extends the projective invariance provided
by the eigensystem to include seesaws between discernible
subspaces. Explicitly, though, SSA solves the eigenproblem
of the normal operator T T * = T * T (with eigenfunctions
of T but squared eigenvalues [Pike et al., 1984]). It is thus
also topology preserving, but only in second moment
statistics (section A2).
[26] Partial spectra sk(T ) may support a functional view
if one-to-one relations exist to discernible features of gk(t).
This raises also the question of spectral reducibility, i.e., of
whether or not sk(T ) = s(T k) [Dunford and Schwartz,
1963]. Subspaces Gk (k = ac, sc, p) may relate to phase
space flows (k = s, t, f ), and so may respective spectra, but
not in an overly naive way (the point spectrum sp for
example, to which the eigenvalues belong, comprises
smooth solutions). Moreover, modern spectral theory calls
for subclassification [Last, 1996]. How well either partition
matches the classical one of base flow, interflow and
overland flow (k = b, i, r) is subject to physical judgment
(section 5.4).
3. Regularization
[27] Having discussed conceptual issues of our FSD
approach, it remains to sketch technical opportunities and
limitations. An efficient, robust method is devised that
exploits incontestable constraints and is neither bound to
specific catchments or regions, nor to the validity of special
assumptions or to availability and quality of rainfall data.
[28] To arrive at unique, stable and relevant solutions,
inverse methods have to be regularized [Engl et al., 1996],
i.e., fortified by prior knowledge. Base flow separation from
streamflow, for example, may rest upon geochemical, filter
theoretical or physical constraints [Furey and Gupta, 2001].
Though the IUH exploits even causality and prior information about the relevant function space, it shows sensitive
dependence on nonnegativity [Boneh and Golan, 1979].
This underlines the rôle of the measure property in hydrologic inversions. The water balance (i.e., mass conservation)
is our natural constitutive constraint, and we employ nonnegativity, smoothness, causality and a ‘‘limiter control’’ as
regularizers.
[29] Generically local constraints like nonnegativity require locally adapting regularization. This calls to mind the
splines which are constructed over a local basis [Unser,
1999] (section A3). Further, the low-flow concept exploits
just the measure property (distance to the abscissa) as a
signal parameter. Base flow separation, at last, relies traditionally on the functional shape of recession, another local
criterion. Our time domain approach via lower streamflow
envelopes is thus hydrologically (yet not mechanistically)
guided.
4 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
[30] Spectral methods, like harmonic analysis [Gaskill,
1978], the WT or SSA, form a fundamental class of
statistical regularization [Tenorio, 2001]. Unfortunately,
they exploit orthogonal basis expansion. Though greedy
waveform (time domain) methods like matching pursuits
[Mallat and Zhang, 1993] do not enforce orthogonality,
they are also unspecific to data which are measures. They
share this shortage with any Hilbert space method that refers
to the global functionals scalar product or variance (the
second statistical moment where the sign of data is lost) as
constitutive building blocks.
[31] In the search for a strategy in Banach space of blind
hydrologic inversion we have thus well-established but less
adequate Hilbert space methods at disposal. Induced by
Neumark’s theorem on spectral estimates in Hilbert and
Banach spaces [Achieser and Glasmann, 1981], we circumnavigate this by projecting initial estimates in Hilbert space
on the hydrologic process. For modes with nonlocal time
support we resort to initial embedding by the SSA. This
method has been invented just in order to detect qualitative
dynamics in principal modes of variability [Broomhead and
King, 1986; Vautard and Ghil, 1989]. Leading SSA modes,
even if hydrologically ‘‘odd,’’ should bear time domain
signatures of environmental and anthropogenic causations
of streamflow variation. In rectifying an SSA mode via
cubic spline interpolation (CSI) (section A3), we mimic a
‘‘hydrologic transform’’ by posterior imposition of constraints (section A4). With regard to spurious effects,
interpolating splines are well suited to serve the idea of
parsimony [e.g., Young, 2001] in signal processing. Moreover, our iterative backprojection is neither a purely mathematical stratagem nor just a technical stopgap. It may in
fact emulate the natural interplay, in the atmospheric and
terrestrial branches of the hydrologic cycle, between sources
and rectifiers (like rainfall) that transform meteorological
data into hydrologic ones.
4. Summary of the Algorithm
[32] The present FSD algorithm (cf. section A4 for the set
of formulae) starts with a leading SSA mode g0(t), labeled
ssa. By proper choice of the (embedding) window we try to
guarantee that this first guess of slow modulations in g(t)
reflects all sufficiently excited slow runoff components.
Rectification R+ follows, which imposes nonnegativity
and further elementary constraints by use of iterative CSI.
The result is a lower envelope gs1(t) to g(t), and the
difference of both separates our estimate gf (t) of a fast
component.
[33] Another use is made of g0(t) when defining a
lower bound. We construct an instantaneous low flow
g‘ (t) (ILF; mode label ilf) as a running, smoothed fit
from below of envelope gs1(t), using both leading eigenvector and time window of the SSA. This ilf mode
controls a hierarchy of K 1 envelopes gesk(t) from a
CSI-based operator iterate. We call the subcomponent piled
up this way a ‘‘driven transient’’ one, gtd(t) = gs1(t) gesK(t).
The hierarchy converges into our estimate of a slow mode,
gs(t), which keeps distance from g‘(t) during periods of
enhanced streamflow. The difference between both completes the transient mode, gt(t), by a ‘‘free transient’’ sub-
W02420
component, gtf(t) = gs(t) g‘(t), not captured by the rules
applied to plot out the driven transient one.
[34] Following the terminology in signal analysis, we call
this full FSD algorithm a ‘‘greedy’’ one (a related term in
potential theory is ‘‘balayage’’ [Kishi, 1964]). A shortcut
version (which might suffice for many purposes) dispenses
with constructing the hierarchy, leaving the overall transient
flow as residue, gt(t) = g(t) gf(t) g‘(t) = gtd(t) + gtf(t).
5. Demonstration
5.1. A Distinctive Spectral Perspective
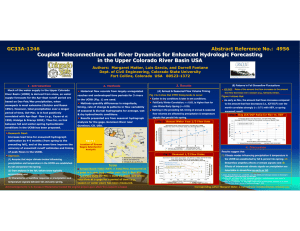
[35] The fractal nature of hydrologic data is demonstrated
in Figure 1 by multifractal analysis for three highlands
stations from headwater catchments: Hammereisenbach
(upper Danube watershed, Breg catchment; southwestern
Germany), Krenstetten (Ybbs watershed, Urlbach catchment; central Austrian part of the Danube basin) and
Blankenstein (Elbe basin, Upper Saale catchment; eastern
Germany). These spectra of singularity provide a ‘‘microscope’’ for evaluating the nature of fluctuations in a data set
(the associated operator is a partition function which captures scaling properties). They should show a canonical
(unbroken, inverse parabolic) shape for headwaters, a
choice intended here to minimize the challenge to hydrologic models.
[36] Rules of thumb how to ‘‘read’’ such dimension
spectra, D(h), are sketched in Figure 1: (1) weaker (stronger) fluctuations are found to the right (left) of the maximum; (2) an integer (noninteger) Hölder exponent h at
maximum D(h) points to a regular (fractal) carrier (generally, h characterizes the type of singularity); (3) spectral
parts with negative h bear ‘‘violent’’ fluctuations; (4) those
with negative D(h) point to latent events. Mallat [1999]
gives a broad exposition, including the wavelet transform
modulus maxima (WTMM) method employed here. To
suppress the bulk of regular behavior, we use the tenth
derivative of the Gaussian (DOG10) as analyzing wavelet.
[37] We cannot recur here on studies with identical
periods, but have checked that D(h) is remarkably stable
for the observed streamflow at Krenstetten (1987 – 1996
versus 1992– 2001). It is broader than for Hammereisenbach (1987 – 1996) and Blankenstein (1982 – 1992), and left
shifted. Distributed hydrologic models used for comparison
include LARSIM [Bremicker, 2000] in the upper Danube,
SWAT [Arnold et al., 1998] in the Ybbs, and SWIM
[Krysanova et al., 1998] in the Saale watersheds. For a
brief introduction into each model and catchment [cf. Carl
et al., 2008].
[38] As far as this can be inferred from different stations
and periods, the models show distinct responses in terms of
fluctuations they generate. Both LARSIM and SWIM tend
to underrate strong(er) events (right-shifted model spectra as
compared to those of observed data). SWAT seems to better
reflect the fractal nature of the data, though there is a steeper
descent in the left part of the spectrum than observed.
Violent fluctuations are thus underrepresented, but not
dropped. SWAT and SWIM spectra have a similar, leftskewed shape, which may result from the kinship of both
models. The carrier of the LARSIM spectrum becomes
regular, that of the SWAT spectrum clearly remains fractal.
5 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
Figure 1. Wavelet transform modulus maxima (WTMM)
based spectra of singularity (analyzing wavelet DOG10) for
three gauges and watershed models: daily observed and
simulated total streamflow for Hammereisenbach (upper
Danube, Germany, Breg, 1987 – 1996; model LARSIM),
Krenstetten (Ybbs, Austria, Urlbach, 1992– 2001; SWAT)
and Blankenstein (Elbe, Germany, Upper Saale, 1982 –
1992; SWIM).
5.2. Time Domain View: Shortcut FSD and Models
[39] We shed a time domain glance on these data and
their disaggregations for 1992, where the three data sets
overlap. LARSIM, SWAT and SWIM all provide estimates
for total daily streamflow and its base flow, interflow and
overland flow components (gb, gi, gr, respectively). For
direct comparison between empirical and model results,
which illustrates to what extent our method emulates
selection rules of a model, we provide FSD analyses of
the simulated total runoff here.
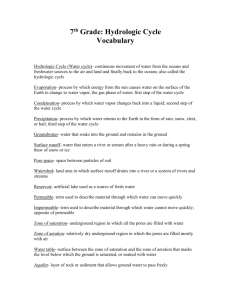
[40] Figure 2 shows observed and LARSIM total flows for
Hammereisenbach, as well as modes of the model’s synthesis
(top) and FSD analysis for the simulated series (bottom: ilf,
transient, fast and the initializing ssa mode; g‘, gt, gf and g0,
respectively). The watershed model is prepared for use in
operational flood forecasting and generates an enhanced
surface runoff to this end. One notes a reduced interflow as
compared with the transient FSD mode, and a rather flat base
flow. Overland flow and interflow fluctuations in LARSIM
are functionally distinct, but not in their timescales. Shortcut
FSD separates functionally discernible flows with distinct
timescales of events for the corresponding fast and transient
modes, and a more pronounced ilf component. Clearly, it
does not (and should not) emulate selection rules of the
specific LARSIM version used.
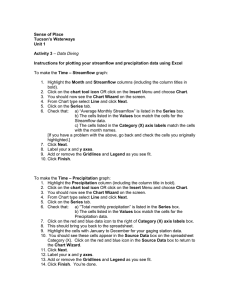
[41] SWAT runoff for Krenstetten (Figure 3) reproduces
the observed one less well than LARSIM does for Hammereisenbach and SWIM for Blankenstein (model vs. observation unlagged correlation/regression slope: 0.59/0.50, 0.87/
0.86 and 0.90/0.79, respectively). Violent fluctuations are
underestimated in general (recall also Figure 1), but assignment to flow components according to their functional
features is reasonable, excepting small fluctuations on top
of the base flow. Shortcut FSD analysis takes part of the
model’s interflow into its fast component, not into the
W02420
Figure 2. Analysis of 1992 daily streamflow, in m3/s, for
gauge Hammereisenbach. (top) Observed and LARSIM
total runoff (g) and LARSIM components base flow (gb),
interflow (gi), and overland flow (gr = g gi gb).
(bottom) LARSIM total runoff (g) and its shortcut
functional disaggregation into ilf (g‘), transient (gt), and
fast (gf = g gt g‘) components; dash-dotted line is ssa
mode g0.
transient one, but the general runoff composition is similar
to that provided by SWAT. SWIM data for Blankenstein
(Figure 4) bear a weakness in the spring-to-summer recession (best visible in the full series) as compared to observation, which affects the seasonal cycle of base flow. Both
functional features and timescales of flow components are
convincing, however. Shortcut FSD largely emulates the
model’s selection rules.
[42] In summary, spectral and time domain views
together do not hint at one among these watershed models
as clearly superior. A broader perspective is presented in
part 2. Figure 5 shows simulated yearly percentage
contributions to total runoff of the three flow components,
as well as those of shortcut FSD for both model gener-
Figure 3. As in Figure 2 but using SWAT for Krenstetten.
6 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
Figure 4. As in Figure 2 but using SWIM for
Blankenstein.
ated and observed data. Weighted means for each analysis
period are given in Table 1. For SWAT and SWIM,
shortcut FSD of the simulated runoff largely confirms
attribution of its ilf modes to base flow. FSD tends to
assign a higher contribution to its fast mode, at the
expense of the transient one, as compared to SWAT
overland versus interflow. Given the field knowledge
about both components, though, this difference of 4%
W02420
(total), even if a systematic one, does not appear to be
relevant.
[43] Best aggregated overall matching, including shortcut FSD of the observed data, is achieved for SWIM here
in each of the three components. Functional features of
total daily streamflow are best represented by LARSIM,
whereas the SWAT watershed model seems superior in the
spectral view presented. That the leftmost spectra in
Figure 1 (which comprise the strongest fluctuations)
belong to Krenstetten is certainly consistent with the
(pre)alpine impact there.
5.3. Greedy Disaggregations of Observed Data
[44] We present the higher functional resolution of greedy
FSD using observed streamflows. Figure 6 shows the effect
of constructing the envelope hierarchy after K = 16 iterations each for data between 1991 and 1993 available at the
three stations. Note that the slow mode gs(t) preserves more
hydrologically consistent SSA information (g0(t)) during
episodes of enhanced streamflow than the ilf mode g‘(t)
does.
[45] To quantify and illustrate the performance of the
iterative process, Figure 7 shows maximum correlations and
corresponding lags of the evolving slow mode, gs1(t), gesk(t)
(k = 2, . . . , K), with respect to both ssa and ilf modes, g0(t)
and g‘(t). At a first glance, g0(t) leads gs(t) by a couple of
days, which in turn leads g‘(t) (upper Danube) or settles
unlagged on the latter (Ybbs). The jump at k = 15 in the lag
with respect to the ilf mode for Blankenstein marks a stable
feature across the Elbe basin, however (the delay is due to a
Figure 5. Yearly percentages of total runoff attributed to overland flow (gr), interflow (gi), and base
flow (gb) by LARSIM for Hammereisenbach (1987– 1996), SWAT for Krenstetten (1992 – 2001), and
SWIM for Blankenstein (1982– 1992) compared to (top to bottom) fast (gf), transient (gt), and ilf (g‘)
FSD modes of both simulated and observed data for the same stations, models, and periods.
7 of 12
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
W02420
W02420
Table 1. Weighted Mean Percentages, for the Entire Analysis Period of Each Case, of Total Runoff Attributed to Overland Flow,
Interflow, and Base Flow by LARSIM for Hammereisenbach, SWAT for Krenstetten, and SWIM for Blankenstein Compared to Fast,
Transient, and Instantaneous Low-Flow FSD Modes for Both Simulated and Observed Dataa
Hammereisenbach (LARSIM)
1987 – 1996
Model
FSD.mod
FSD.obs
Krenstetten (SWAT)
1992 – 2001
Blankenstein (SWIM)
1982 – 1992
gr/f
gi/t
gb/‘
gr/f
gi/t
gb/‘
gr/f
gi/t
gb/‘
51
23
20
27
44
43
22
33
37
20
24
30
46
42
32
34
34
38
22
21
22
39
38
40
39
41
38
a
See also Figure 5 for details.
‘‘smoothing-resistive’’ peak in the envelopes here): The
slow mode gs(t) lags behind both g0(t) and g‘(t). Though
such distinctions might bear hydrologic relevance, one
should neither overstrain minor effects nor rush to physical
conclusion. We notice the very existence, however, of
apparently systematic tendencies in the (operatively selfsimilar) CSI-based iteration, and in its result, for different
hydrologic systems.
5.4. Discussion
[46] To further evaluate our disaggregation, spectra of
singularity are shown in Figure 8 for the observed runoff at
Hammereisenbach (1987 – 1996). Those of its FSD components which directly derive from the envelope hierarchy
(fast, driven transient, slow; gf, gtd, gs, respectively) are
clearly disjoint in their carrier position. Since these spectra
provide independent diagnostics, the three-modal structure
is noticeable. The free transient spectrum gtf has a less
canonical shape (not shown), but its impact on the full
transient one (gt) is weak. The ilf (g‘) spectrum is discernible yet not disjoint from the transient mode regime. In place
of the fractal carrier position, this mode is distinct here in its
capacity, D(hmax), and in the shape of the spectrum.
Figure 6. Effect of greedy FSD in partial flow estimates
for observed daily discharge: upmost envelope gs1 = g gf
and modes slow (gs, 16 iterations), ilf (g‘), and ssa (g0) for
(top) Hammereisenbach (1991– 1993), (middle) Krenstetten
(1992 – 1993), and (bottom) Blankenstein (1991– 1992).
[47] As for attribution of FSD modes, the question arises
if all slow waters, gs(t), should be interpreted as base flow,
gb(t). Though Figure 8 might suggest a positive answer, all
distributed models we have consulted so far hint at a
negative one. We are thus induced to tentatively understand
the result presented in Figure 6 as supporting the reasoning
in favor of transient subcomponents. As a consequence, we
assign the ilf mode to base flow. The slow manifold of our
greedy FSD operator (iterate) does thus not directly host one
of the classical streamflow components here.
[48] The fast component shows mostly a reasonable time
domain behavior, including the location of implied surface
runoff events beneath individual storm hydrographs. Pending direct assessment of an instantaneous mode [Young,
2001] via its singularity structure, we may attribute gf(t) to
classical overland flow, gr(t). The transient mode, with
intermediate scale of fluctuations and functional shape,
covers recession slopes of storm hydrographs or of groups
of them. Though we have directly identified its dominating,
operatively self-similar (driven transient) contribution, the
full mode gt(t) remains here as equivalent of the traditional
interflow, gi(t), when completing the classical conceptual
Figure 7. Approach toward slow component gs by
successive envelopes gs1, gesk(k = 2, . . . , 16) for observed
daily streamflows at Hammereisenbach (1987 – 1996),
Krenstetten (1992– 2001), and Blankenstein (1982 – 1992).
Shown are (left) maximum correlations (right) at corresponding lags with respect to both (top) ssa (g0) and
(bottom) ilf modes (g‘).
8 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
Figure 8. WTMM-based spectra of singularity (analyzing
wavelet DOG10) for observed daily streamflow at Hammereisenbach (1987– 1996) and their FSD components.
picture . . . by shortcut FSD. This latter fact seems attractive
for practical reasons, though it does not necessarily imply,
of course, the most conclusive attribution.
[49] Since Figure 8 addresses singular dynamics it
might indicate that flow components which directly belong to the FSD hierarchy are best suited to map the
phase space topology of (pre)chaotic motions behind the
data (section 2.3). This deserves inquiry using longer time
series, direct reconstruction of the singularity mode, and
detailed study of distinctions in these spectra, their
qualitative similarities (as seen for the other two stations
here; not shown) notwithstanding. Recurring to Lebesgue,
we expect to learn more about functional aspects of the
singular continuous spectrum [Last, 1996], with its proximity to chaotic dynamics, and about the transient mode
regime [Avron and Simon, 1981], from such a singularitybased supplement to the present FSD approach.
6. Summary and Conclusions
[50] An exploratory tour has been presented to highlight
bare essentials and the potential of a largely objective, blind
approach to streamflow inversion into functionally discernible, hydrologically relevant modes. Our regularity-based
disaggregations hint at three- to four-modal FSD structures
borne in elementary hydrologic prior knowledge. That they
may bear disjoint partial spectra of adequate operators has
been illustrated by multifractal analyses. The strategy is not
parameter-free, but does neither depend on meteorological
data nor require system identification or calibration. It may
thus be useful in a variety of hydrologic (and data) situations. Assessments beyond the highlands environment
chosen here for demonstration are found in part 2.
[51] To make clear what our concepts and technical
decisions mean, we have sketched a ‘‘contextualized’’
mathematical background where indicated. Our separability
premise simply requires streamflow components to be
functionally discernible. Though this is by no means a
truism, it does certainly not unacceptably narrow the task.
Some of our choices are not compelling under the separability axiom: physically founded regularizers, SSA-based
W02420
initialization and the lower (ILF) bound. The latter is a sort
of ‘‘minimal convolution’’, however, a concept related to
that of lower envelopes which is physically likewise justified. Technical parameters (length of the SSA window, CSI
knot selection rules) will become optimized in future
applications, including situations not yet covered (e.g.,
frozen soils, marshland).
[52] The method makes temperate demands on computational and personnel resources, so it might serve routine
diagnostics without binding countable research or operational potential. By construction the technique is a priori
correct in both overall structure of singularities and total
flow. It may thus help unveiling and clearing deficiencies in
hydrologic models. Further potential applications include
guidance of calibration for models suffering from equifinality, or support in identifying modal structures of runoff at
gauges influenced by water management. The complex
aggregate ‘‘streamflow’’ is disaggregated not only for
obvious hydrologic reasons, however. As an archive of
climatic signatures, runoff data may help identifying qualitative dynamics the system in the back follows. Clues on
the forcing that shapes terrestrial hydrology might be found
in selective responses of discharge modes. A well-founded,
blind functional disaggregation should also bear the potential to contribute in reconstructions of the historic terrestrial
hydrologic cycle.
[53] From the very beginning of their ‘‘invention,’’
streamflow components have been viewed as conceptual
entities. A relevant question reads thus: Is there a practical
or conceptual gain from the premise chosen, separability,
and from its consequences? We mean to have shown that
answers may turn out positive, and will further substantiate
this in part 2. Let us turn the question for clarity: What is the
gain for functional streamflow disaggregation of using
additional data, with their measurement problems and under
hidden assumptions, over the prior knowledge used here?
[54] Any single method is insufficient in general to
analyze all relevant aspects of a complex dynamic system.
For a detailed catchment study, it will be reasonable to
exploit the maximum of available data. In using streamflow
inversion with a view to climatic signatures, in contrast, it
would not be wise to prejudice the results by extensive
recourse to meteorological information and related presumptions. We followed a conceptual line here in touch to
qualitative dynamics and may have found a proper blind
solution. FSD response to different types of data error
deserves separate in-depth inquiry. The impact is perhaps
sign-dependent, though most disturbing to our lower-envelope approach are substantial localized setbacks (e.g., erroneous shifts in the decimal point) that may be detected by
the naked eye . . . prior to ‘‘blind’’ analysis. Reconstruction
of the singularity mode might also help identifying certain
types of data error. Fortunately, the issue is irrelevant when
analyzing model outputs, within the context of one of the
envisioned fields of FSD application.
Appendix A:
Technical Details
A1. Signal Transmission and Reduction
[55] Signal theory distinguishes in (5) the unknown object
k(t) from its known P
image gk(t). Projector P k yields gk =
gP
nk nk
g k, gk 2 Gk), its idempon¼1 x kn fkn and gk =
n¼1 x kn fkn (
9 of 12
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
W02420
tence P k{fkn} = fkn and T {fkn} = T P k{fkn} = T k{fkn} =
condition (5) into (10) via
lknfkn. This translates
P reducibility
k
gk(t) := T {
gk}(t) = nn¼1
lknx knfkn(t). Both sets of projection
k
k
and {x kn}nn=1
, relate thus to one another,
coefficients, {xkn}nn=1
x k = xk /lk , via the eigenvalues. Once element (li, fi) is
n
n
n
P
P
available in an eigenexpansion g(t) = ni¼1 x ifi(t) n = knk,
object mode gi(t) may be estimated by projecting image g(t)
on eigenfunction fi(t),
R in Hilbert space via scalar product
x i hg, fii := T1 T g(t) fi ðt Þdt (overbar represents
complex conjugation). Object and image coincide if and
only if li = 1 8 i 2 [1, n].
[56] Computational tractability requires truncation of
eigenexpansions at finite N. This serves stability as well
since inversion of a signal transduction system
Z
0
g ðt Þ ¼ T fggðt Þ 0
kðt; t Þ
g ðt Þ dt
0
ðA1Þ
T
by its discrete analogue may result in unstable numerical
solutions: Excepting the Fourier transform, mostly jlij ! 0
for i ! 1. (A1) is thus also insensitive to high-frequency
(or short-scale) components, which cannot be distinguished
then from noise. Convergence is therefore not guaranteed
for arbitrary k [Pike et al., 1984]. This concerns also the
IRF approach to rainfall-runoff analysis, where the righthand side of (A1) becomes a convolution integral, with g as
(effective) rainfall f and kernel k(t, t0) as the IUH, h(t t0).
Noise in the data g(t) aside, an embedding dimension of the
corresponding dynamic system would provide a proper
cutoff N of the spectrum {li} used to recover g(t).
A2. Singular-System Analysis (SSA)
[57] SSA provides a genuine statistical decomposition of
the data g(t) in (A1). It roots in the point spectrum of the
Karhunen-Loève transform (KLT) [Karhunen, 1946] and
emulates the delay coordinate approach to dynamic systems
analysis from time series. The KL expansion exploits
dependence in second-order statistics and is complete and
optimal in the sense of captured variance. The SSA eigenvalue problem is an integral equation of convolution type,
T S ffi gðt Þ :¼
1
q
Z
Cg ðt t Þfi ðt Þ dt ¼ li fi ðt Þ ;
ðA2Þ
remarkable properties: (1) minimum curvature (least inclination to oscillations); (2) maximum regularity; (3) best
approximation. The latter is the domain of smoothing
splines. We need an exact method here, interpolation. In
contrast to polynomial interpolation, spline interpolation
does not require mth-order splines for m knots, G s
{g l, tl}m
1 . The interpolating function g (t) is built instead
of m shifted and scaled copies of a single function sn(t),
thus forming a local basis of the (formal) series expansion
[Hou and Andrews, 1978],
g s ðtÞ ¼ J nG ðt Þ A3. Cubic Spline Interpolation (CSI)
[58] Splines sn(t) are piecewise polynomial functions
(n represents polynomial degree) with a strong smoothness
constraint, continuity at the knots (g l, tl) 2 G up to the
(n 1)th derivative (g l g (tl)). This imparts to them
m
X
gls sn ðt tl Þ:
ðA3Þ
l¼1
Function sn(t tl) deviates from zero only in a Q environment
of tl; the number of knots per Q depends on the order n of the
spline. Coefficients {gsl } are determined at the knots, and
interpolation gs = J nG J n{{g l, tl}m
1 } has the sampling points
as knots; so it reproduces G precisely. A cubic spline, s3(t), the
one most commonly used [Hou and Andrews, 1978], has
smooth first and continuous second derivatives, both at the
knots and between them. A concise tutorial and reference
source is found in work by Unser [1999].
A4. Estimation of Flow Components
[59] For a first-guess leading SSA mode, g0(t) := T S0{g}(t) =
E 0T S{g}(t), which comprises the excited slow variations, we
dispense with data centering (arithmetic mean g) and use an
embedding window of q = 40 days throughout. These
choices define our spectral function E 0, an equivalent to
high-pass variance filtering T~ S (T S0{g}(t) = g0(t) g~(t) =
T~ S{g(t) g} + g). Neither do we leave the Hilbert space nor
can we rule out crossing between g0(t) and g(t) this way. SSA
mode g0(t) becomes thus the target of iterative CSI correction J G3j ( j = 1, . . ., J; J is number of iterations). This
rectification R+ , i.e., posterior imposition of nonnegativity,
is furnished with causality and smoothness constraints in the
CSI knot selection rules (not discussed here in detail). It is
part of our (also iterative) projection from Hilbert to Banach
space (spectral function F 1 = R+ E 0). To simplify boundary
conditions, we apply it to the difference series d0(t) = g(t) g0(t). The result is a lower envelope to g(t),
q
with the unknown kernel k in (A1) replaced by the normalized
autocovariance function of the data set g at lag t, Cg(t t)/q
[Vautard and Ghil, 1989]. Each li of the KL spectrum has the
physical meaning
of a variance, and completeness of SSA is
P
assured by ili = Cg(0). q is a time window here, not the
support
T of the data.
PNSSA decomposition proceeds via g(t, t) =
PN
g
(t
+
t)
=
i¼1 i
i¼1 x i(t)fi(t), where the principal compobecause of the windowed
nents xi become time-dependent
R
+ t) fi ðt Þdt. SSA modes are
approach, xi(t) := 1q q g(t
R
reconstructed via gi(t) = J1 J xi(t t)fi(t) dt (J = q, except
at the boundaries). A certain freedom in the choice of N (or q)
relates to embedding.
W02420
s
gs1 ðtÞ :¼ Rþ
fg0 gðt Þ g ðt Þ d0 ðt Þ d1 ðt Þ
ðA4Þ
(superscript s stands for ‘‘spline,’’ subscript for ‘‘envelope’’). Here, ds1(t) := R+ {d0}(t) = J D3J(t) is the CSI outcome
of the set of knots D {di, ti}m
1 as determined when
imposing constraints on d0(t). Envelope gs1(t), which
combines SSA information with prior knowledge, leaves
thus a potentially hydrologic component as residue,
gf ðtÞ g1þ ðt Þ :¼ g ðt Þ gs1 ðt Þ:
ðA5Þ
We take it as estimate of a fast mode, i.e., adopt an
approximation T +f to T f of the form T f T +f := I R+ T S0
(according to (8), the operator-valued sum of allPpartial
inversions yields the identity operator, I T id = kT k).
[60] The slow manifold is approached in a methodically
consistent way. By construction, R+ T S0 estimates an ‘‘opera-
10 of 12
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
W02420
tor complement’’ to T f, and gsl(t) is thus the target of further
disaggregation. A resulting hierarchy of lower envelopes,
n o
s
gskþ1 ðtÞ :¼ Rþ
gk ðt Þ
ðA6Þ
(k = 1, . . ., K), however, appears to run into an almost
arbitrarily smooth mode. Constraints as imposed by R+
alone might thus be insufficient to endow gsK(t) with
physical relevance, i.e., as a slow mode estimate. For
another intrinsic constraint, we employ low flow (LF) as a
‘‘hard limiter.’’ A customary LF definition probes the data
from below by the box-shaped Haar function (it maximizes
the infimum of both), though in an imprecisely discretized
(monthly), sequential manner. For internal consistency, we
define a running instantaneous low flow (ILF) using SSA
window q as timescale and replacing the Haar function by
the scaled (a) and offset (w) SSA eigenvector f0, of either
sign:
! ðt Þ ¼ að!f0 ðt Þ þ wÞ ðt 2 qÞ:
f
0
ðA7Þ
Variation of a, w and sign provides a best approximation by
locally
the ‘‘infimal component’’ x(t) = 1q
R ± maximizing
s
qf0 (t)g1(t + t) dt. The ilf mode g‘(t) and operator R‘,
Z
n o
1
max ðt; t Þx max ðt t Þdt;
f
g‘ ðtÞ :¼ R‘ gs1 ðt Þ ¼
J J 0
ðA8Þ
are thus defined in analogy to the SSA (section A2) but
as a sort of maximized ‘‘infimal convolution,’’ reminiscent of lower-envelope constructions in image processing
[Maragos, 2001]. Mode g‘(t) is estimated from g(t) by
T ‘ := R‘R+ T S0.
[61] In the greedy FSD version all envelopes but the
upmost one, gs1(t) (which is used to define g‘(t) itself), are
subject to this additional ILF constraint. We change subscript into e in order to designate this and obtain a set of K
further components, in addition to (A5),
g2þ ðtÞ :¼ gs1 ðtÞ ges2 ðt Þ
gkþ ðtÞ :¼ gesk
1 ðt Þ gesk ðtÞ ðk ¼ 3; . . . ; K Þ
þ
gKþ1
ðt Þ
:¼
gesK ðtÞ
ðA9Þ
:
We adopt g+K+1(t) as an estimate of the slow mode, gs(t), and
approximate T s thus by an operator iterate, T s T +s :=
{R+e }K
1R+ T S0. An operatively self-similar mode is grasped
this way which we call ‘‘driven transient,’’ gtd(t) = g(t) gf (t) gs(t). The process does not converge everywhere
into the ilf mode, leaving a subcomponent gtf (t) = gs(t) g‘ (t) that we call ‘‘free transient.’’ Both together form the
(shortcut) transient mode, gt(t) = gtd (t) + gtf (t): In a shortcut
FSD version, where we dispense with computing the
hierarchy, it remains just as the difference gt(t) = g(t) gf (t) g‘(t) (i.e., T t T +t := I T +f T +‘ ).
[62] Acknowledgments. We thank Kai Gerlinger, Fred Hattermann,
and Christian Schilling, coauthors of part 2, for permitting use of their
model data in advance. P.C. recalls with thanks earlier support from the
Max Planck Institute for Meteorology, Hamburg, in granting access to Ben
Santner’s EOF software collection, the basis of our own SSA. For the CSI
we rely on technically adapted versions of subroutines spline and splint,
found in the classic by Press et al. [1992]. The WTMM code is our own
W02420
product, but the wavelet part profited much from Torrence and Compo
[1998]. We are deeply indebted to Bellie Sivakumar and two other
anonymous reviewers who helped substantially improve our presentation
of both methods and results. Last but not at all least our sincere thanks are
due to the editors for preserving their sound balance of pertinacity and
patience that steered this process.
References
Achieser, N. I., and I. M. Glasmann (1981), Lineare Operatoren im HilbertRaum, edited by H. Baumgärtel, 496 pp., Akademie, Berlin.
Arnold, J. G., R. Srinivasan, R. S. Muttiah, and J. R. Williams (1998),
Large area hydrologic modeling and assessment. part I: Model development, J. Am. Water Resour. Assoc., 34(1), 73 – 89.
Avron, J., and B. Simon (1981), Transient and recurrent spectrum, J. Funct.
Anal., 43(1), 1 – 31.
Barnes, B. S. (1939), The structure of discharge-recession curves, Eos
Trans. AGU, 20(4), 721 – 725.
Berezansky, Y. M., Z. G. Sheftel, and G. F. Us (1996), Functional Analysis,
vol. 1, 423 pp., Birkhäuser, Basel, Switzerland.
Beven, K. J. (2001), Rainfall-Runoff Modelling. The Primer, 360 pp., John
Wiley, Chichester, U. K.
Beven, K., and J. Freer (2001), Equifinality, data assimilation, and uncertainty estimation in mechanistic modelling of complex environmental
systems using the GLUE methodology, J. Hydrol., 249, 11 – 29.
Boneh, A., and A. Golan (1979), Instantaneous unit hydrograph with negative ordinates—Possible?, Water Resour. Res., 15(1), 121 – 130.
Bremicker, M. (2000), Das Wasserhaushaltsmodell LARSIM—Modellgrundlagen und Anwendungsbeispiele, Freiburger Schr. Hydrol., vol. 11, edited
by C. Leibundgut and S. Demuth, 119 pp., Inst. for Hydrol., Univ. Freiburg,
Freiburg, Germany.
Broomhead, D. S., and G. P. King (1986), Extracting qualitative dynamics
from experimental data, Physica D, 20(2 – 3), 217 – 236.
Carl, P., K. Gerlinger, F. F. Hattermann, V. Krysanova, C. Schillin, and
H. Behrendt (2008), Regularity-based functional streamflow disaggregation: 2. Extended demonstration, Water Resour. Res., doi:10.1029/
2006WR005056, in press.
Chapman, T. G. (1985), Continuous convolution with hydrologic data,
Water Resour. Res., 21(6), 847 – 852.
Chapman, T. (1994), Comment on ‘‘How much complexity is warranted in
a rainfall-runoff model?’’ by A. J. Jakeman and G. M. Hornberger, Water
Resour. Res., 30(12), 3565.
Chow, V. T. (1964), Runoff, in Handbook of Applied Hydrology, edited by
V.-T. Chow, chap. 14, pp. 14-1 – 14-54, McGraw-Hill, New York.
Dietrich, C. R., J. P. Norton, and A. J. Jakeman (1993), Ill-conditioning in
environmental system modelling, in Modelling Change in Environmental
Systems, edited by A. J. Jakeman, M. B. Beck, and M. J. McAleer, chap. 2,
pp. 37 – 57, John Wiley, Chichester, U. K.
Dooge, J. C. I. (1959), A general theory of the unit hydrograph, J. Geophys.
Res., 64(2), 241 – 256.
Dunford, N., and J. T. Schwartz (1963), Linear Operators Part II: Spectral
Theory, Wiley-Interscience, New York.
Engl, H. W., M. Hanke, and A. Neubauer (1996), Regularization of Inverse
Problems, 321 pp., Kluwer, Dordrecht, Netherlands.
Faybishenko, B. (2004), Nonlinear dynamics in flow through unsaturated
fractured porous media: Status and perspectives, Rev. Geophys., 42,
RG2003, doi:10.1029/2003RG000125.
Furey, P. R., and V. K. Gupta (2001), A physically based filter for separating base flow from streamflow time series, Water Resour. Res., 37(11),
2709 – 2722.
Gaskill, J. D. (1978), Linear Systems, Fourier Transforms, and Optics,
554 pp., John Wiley, New York.
Hino, M., and M. Hasebe (1981), Analysis of hydrologic characteristics from
runoff data—A hydrologic inverse problem, J. Hydrol., 49, 287 – 313.
Hino, M., and M. Hasebe (1986), Separation of a storm hydrograph into
runoff components by both filter-separation AR method and environmental isotope tracers, J. Hydrol., 85, 251 – 264.
Hou, H. S., and H. C. Andrews (1978), Cubic splines for image interpolation and filtering, IEEE Trans. Acoust. Speech Signal Process., 26(6),
508 – 517.
Jakeman, A. J., and G. M. Hornberger (1993), How much compexity is
warranted in a rainfall-runoff model?, Water Resour. Res., 29(8),
2637 – 2649.
Jakeman, A. J., and G. M. Hornberger (1994), Reply, Water Resour. Res,
30(12), 3567.
11 of 12
W02420
CARL AND BEHRENDT: FUNCTIONAL STREAMFLOW DISAGGREGATION, 1
Jakeman, A. J., I. G. Littlewood, and P. G. Whitehead (1990), Computation of
the instantaneous unit hydrograph and identifiable component flows with
application to two small upland catchments, J. Hydrol., 117, 275 – 300.
Karhunen, K. (1946), Zur Spektraltheorie stochastischer Prozesse, Ann.
Acad. Sci. Fenn., Ser. A, 34, 1 – 7.
Kishi, M. (1964), A remark on a lower envelope principle, Ann. Inst. Fourier,
14(2), 473 – 484.
Krysanova, V., D.-I. Müller-Wohlfeil, and A. Becker (1998), Development
and test of a spatially distributed hydrological/water quality model for
mesoscale watersheds, Ecol. Modell., 106, 261 – 289.
Last, Y. (1996), Quantum dynamics and decompositions of singular continuous spectra, J. Funct. Anal., 142(2), 406 – 445.
Mallat, S. (1999), A Wavelet Tour of Signal Processing, 637 pp., Academic,
London.
Mallat, S., and Z. Zhang (1993), Matching pursuits with time-frequency
dictionaries, IEEE Trans. Signal Process., 41(12), 3397 – 3415.
Maragos, P. (2001), Differential morphology, in Nonlinear Image Processing, edited by S. K. Mitra and G. L. Sicuranza, chap. 10, pp. 289 – 329,
Academic, San Diego, Calif.
McWhirter, J. G., and E. R. Pike (1978), On the numerical inversion of the
Laplace transform and similar Fredholm integral equations of the first
kind, J. Phys. A Math. Gen., 11(9), 1729 – 1745.
Michel, C. (1999), Comment on ‘‘Can we distinguish Richards’ and Boussinesq’s equations for hillslopes?: The Coweeta experiment revisited’’ by
T. S. Steenhuis et al., Water Resour. Res., 35(11), 3573.
Mitosek, H. T. (2000), On stochastic properties of daily river flow processes, J. Hydrol., 228, 188 – 205.
Nash, J. E. (1959), Systematic determination of unit hydrograph parameters, J. Geophys. Res., 64(1), 111 – 115.
Nathan, R. J., and T. A. McMahon (1990), Evaluation of automated techniques for base flow and recession analyses, Water Resour. Res., 26(7),
1465 – 1473.
Perrin, C., C. Michel, and V. Andréassian (2001), Does a large number of
parameters enhance model performance? Comparative assessment of
common catchment model structures on 429 catchments, J. Hydrol.,
242, 275 – 301.
Pike, E. R., J. G. McWhirter, M. Bertero, and C. de Mol (1984), Generalised information theory for inverse problems in signal processing, IEE
Proc., Part F, 131(6), 660 – 667.
Press, W. H., S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery (1992),
Numerical Recipes in FORTRAN: The Art of Scientific Computing, 2nd
ed., 963 pp., Cambridge Univ. Press, Cambridge, U. K.
Reed, M., and B. Simon (1972), Methods of Modern Mathematical Physics.
I: Functional Analysis, Academic, New York.
W02420
Rodrı́guez-Iturbe, I., and J. B. Valdés (1979), The geomorphologic structure
of hydrologic response, Water Resour. Res., 15(6), 1409 – 1420.
Rodrı́guez-Iturbe, I., M. González-Sanabria, and R. L. Bras (1982), A
geomorphoclimatic theory of the instantaneous unit hydrograph, Water
Resour. Res., 18(4), 877 – 886.
Sauer, T., J. A. Yorke, and M. Casdagli (1991), Embedology, J. Stat. Phys,
65(3/4), 579 – 616.
Sivakumar, B. (2000), Chaos theory in hydrology: Important issues and
interpretations, J. Hydrol., 227, 1 – 20.
Sivakumar, B. (2004), Chaos theory in geophysics: Past, present and future,
Chaos Solitons Fractals, 19(2), 441 – 462.
Sivakumar, B., S. Sorooshian, H. V. Gupta, and X. Gao (2001), A chaotic
approach to rainfall disaggregation, Water Resour. Res., 37(1), 61 – 72.
Spongberg, M. E. (2000), Spectral analysis of base flow separation with
digital filters, Water Resour. Res., 36(3), 745 – 752.
Steenhuis, T. S., J.-Y. Parlange, W. E. Sanford, A. Heilig, F. Stagnitti, and
M. F. Walter (1999a), Can we distinguish Richards’ and Boussinesq’s
equations for hillslopes?: The Coweeta experiment revisited, Water Resour. Res., 35(2), 589 – 593.
Steenhuis, T. S., J.-Y. Parlange, W. E. Sanford, A. Heilig, F. Stagnitti, and
M. F. Walter (1999b), Reply, Water Resour. Res, 35(11), 3575 – 3576.
Tenorio, L. (2001), Statistical regularization of inverse problems, SIAM
Rev., 43(2), 347 – 366.
Torrence, C., and G. P. Compo (1998), A practical guide to wavelet analysis, Bull. Am. Meteorol. Soc., 79(1), 61 – 78.
Tsankov, T. D., and R. Gilmore (2003), Strange attractors are classified by
bounding tori, Phys. Rev. Lett., 91(13), 134104.
Unser, M. (1999), Splines. A perfect fit for signal and image processing,
IEEE Signal Process. Mag., 16(6), 22 – 39.
Vautard, R., and M. Ghil (1989), Singular spectrum analysis in nonlinear
dynamics, with applications to paleoclimatic time series, Physica D,
35(3), 395 – 424.
Young, P. C. (1992), Parallel processes in hydrology and water quality: A
unified time series approach, J. Inst. Water Environ. Manage., 6(5),
598 – 612.
Young, P. (2001), Data-based mechanistic modelling and validation of
rainfall-flow processes, in Model Validation: Perspectives in Hydrological Science, edited by M. G. Anderson and P.-D. Bates, chap. 7,
pp. 117 – 161, John Wiley, Chichester, U. K.
H. Behrendt and P. Carl, Leibniz Institute of Freshwater Ecology and
Inland Fisheries, Müggelseedamm 310, D-12587 Berlin, Germany.
(behrendt@igb-berlin.de; pcarl@wias-berlin.de)
12 of 12