Lab manual - Concordia University
advertisement

Department of Mechanical & Industrial Engineering Concordia University
MECH 371 Analysis and
Design of Control Systems
Laboratory Manual
W. Xie, H. Hong, T. Wen, G. Huard
12/21/2015
Table of Contents
Lab 1: Control System Introduction, Familiarization with Lab Equipments
and Instruments ........................................................................................................... 2
Lab 2: Determination of DC Motor Dead-Band, Gain, Servo-Amplifier
Gain, Torque/Speed Characteristic.… ........................................ 14
Lab 3: Time Response of Basic Closed-Loop System and Effect of
Tachometer Feedback ............................................................... 26
Lab 4: Frequency Response of Basic Closed-Loop DC Motor System .... 33
Lab 5: DC Motor Position Control with Cascade PID Compensation .... 37
Appendix A: Connect Oscilloscope to MS Excel………………………………………………….43
Appendix B: Summary of MS150 Data- DC Motor System …………..………………….44
Labs are scheduled on an alternative week basis (every two weeks). Therefore,
formal lab reports must be submitted every two weeks during your lab period.
Please submit your fifth lab report directly to your lab instructor at his/her office,
two weeks after you have performed the lab.
No late lab reports will be accepted.
1
Lab 1: Control System Introduction, Familiarization
with Lab Equipment & Instruments
Objectives
To familiarization students with MS150 DC Motor Control Modules, instruments such as function
generator and oscilloscope and to calibrate potentiometers, Op Amp and pre-amplifier.
Introduction
The purpose of the laboratory is to acquaint the student with a practical classical feedback, control
system [specifically an electromechanical angular position control system using a DC motor], and
to become familiar with the measurement of basic performance parameters of the system, both in
the time-domain and in the sinusoidal frequency domain. A position control system (rather than any
other variable) is used in this lab not only because of its wide application (e.g. position control in
robotic manipulators, setting of hydraulic/pneumatic valves in process-control systems, positioning
of directional antennas in communication systems etc.) but also because important operational
characteristics such as overshoot may be directly (visually) observed when the controlled variable is
the 'position'.
𝜽𝜽𝒅𝒅
Ki
150H
𝑽𝑽𝒊𝒊
150A
−
𝑽𝑽𝒐𝒐
𝑽𝑽𝒆𝒆
K1
Kp
150B
top
150C
𝑲𝑲𝒎𝒎
𝟏𝟏+𝑺𝑺𝝉𝝉𝑴𝑴
150D
+150F
𝝎𝝎𝒎𝒎
𝟏𝟏
𝑺𝑺𝑺𝑺
𝜽𝜽𝒐𝒐
150X
(Gear)
Ko
150K
Figure 1-1 Basic DC Motor Angular Position Control System
Figure 1.1 is a basic angular position control system. An Input Potentiometer 150H (input position
transducer) translates the desired angular position θd into a proportional voltage Vi. A Servoamplifier 150D which drives the motor and which, together with a DC motor in 150F, forms the
'servomotor'. The motor drives a mechanical load mainly consisting of a flywheel (representing a
real load), through a Gear train (Gear box) in 150F which provides both amplification of the motor
torque as well as speed reduction.
2
Oscilloscope
Function Generator
AU150B Top
OA150A
PS150E
PA150C
AU150B Bot
SA150D
PID150Y
GT150X
DCM150F
LU150L
IP150H
OP150K
Figure 1-2 MS150 DC Motor Control System
An Output Potentiometer 150K (output position transducer) translates the angular position θo, of
the flywheel shaft, into a proportional voltage Vo. The device called the “Reference Comparator”
150A compares the voltage Vo with the reference input voltage Vi, which represent s the desired
posit ion of the fly wheel, and generates the difference between them: Ve = Vi –Vo, then the
3
voltage Ve will represent the 'error' between the desired position and the actual position. The
reference comparator is therefore also called an 'error detector'. The 'error' signal Ve , can be
adjusted by K1 150B, then amplified by a pre-amplifier 150C and subsequently by a poweramplifier 150D, is used to drive the motor in such a sense as to reduce the 'error' itself. A system
such as the one just described (shown in Figure 1.1) is called a closed loop, negative-feedback
position control system.
The Modular DC Servotrainer MS150 used in the lab is designed to demonstrate the basic
principles of a classical closed-loop negative feedback control system as shown in Figure 1-2: an
electromechanical system using a DC motor which controls the angular-position of a shaft. The
equipment consists of modular units for the motor, amplifiers etc., mounted on a baseplate. The
various modules are positioned on a baseplate as shown above. Each station also includes a function
generator and an Oscilloscope. Except for some main connections, interconnections between the
various modules are made by the student, using banana-plug-ended patch cords which are provided
in the laboratory. The power supply module 150E is permanently connected to the motortachometer module 150F and to the servo-amplifier module 150D. Terminals which provide a
balanced +15/ 0 /-15 volt DC output are available on the power
supply and servo-amp modules. A 3-wire harness is connected
to distribute the ±15 volt supply to the operational amplifier,
preamplifier and PID modules. The +15/ 0 /-15 supply voltages,
available at terminals on the power supply module 150E, are
also used to supply voltages to the Input & Output
Potentiometers (150H & 150K) , which make up the "error
channel".
Power Supply PS150E provides the ±15 volt DC power
supplies through two sets of sockets. These sockets are used to
operate small amplifiers and provide reference voltage. The
Ammeter is used for monitoring motor overload. The AC
outputs are not used in our experiments. The front panel is
shown in Figure 1-3.
Figure 1-3 Power
Supply: PS150E
Potentiometers: showing in Figure 1-4. The module includes an Input Potentiometer IP150H (as
an input position transducer), an Output Potentiometer OP150 K (output position transducer), and
an Attenuator Unit AU150B containing two smaller potentiometers, which are used to adjust gains
in the forward and feedback paths. The input and output pots are fitted with discs graduated (in
degrees) on their shaft.
However, the output pot can be rotated continuously over 360º, whereas the input pot has a limited
rotation of about ± 150°. Both these 'angular position transducers' are normally supplied with +15
and –15 volts, so that their outputs can vary linearly from zero to almost either of these limits as
their shafts are rotated in either direction from a central (zero) position. Normal operation is
symmetrical about this zero position. Note that in the output pot, a zero-voltage transition also
4
occurs at the + or –180° position, hence requiring operation which ensures output angular
displacements within these limits. Assuming that the total voltage applied across the output pot is
30 volts, and the rotation is 360°, the position-to-voltage transducer sensitivity K0 will be 30 / 360
≈ 0.083 volt / deg., or approx. 4.8 volts/radian. The input and output potentiometers should be
calibrated to obtain their sensitivity constants and/or to confirm whether Ki ≈ Ko.
The pots in the Attenuator unit are provided with knobs and scale graduations from 0 to 10. These
pots can be used as voltage dividers and to obtain the very small voltages.
A: Input Pot IP150H
B: Output Pot
OP150K
C: Attenuator AU150B
Figure 1-4 Potentiometers
Operational Amplifier OA150A (Figure 1-5) is an op-amp normally connected as a unity-gain
summing-inverter by means of the 3-position switch mounted on it. It is used as the angular-positionerror detector.
Since the unit is a summing amplifier, the feedback
signal polarity must be reversed with respect to the
reference signal, in order that the output will represent
the error. The unit has three summing input terminals,
and the output is available at two (or three) output
sockets. The unit also has a zero-set control and a
selector switch, which selects the feedback (normally
resistive) within the unit. The selector switch is
normally switched to the leftmost position indicating
resistive feedback with unity gain. The op-amp must
be zeroed before use. {ZERO PROCEDURE: With no
input applied (input terminals#1, #2, #3 connect to
ground), the Zero-Set control knob should be
carefully adjusted until the output #6 is zero volt
Figure 1-5 Op-Amp OA150A
mean.}
Experiment Procedure
MS150 System is equipped with a DC motor, with a tachometer to measure angular velocity,
turning potentiometer (designated as input pot and output pot ) to give and measure angular
position, and power amplifier (also known as pre-amp and servo-amp) to drive the motor. The
5
command signal can be provided by the function generator or input pot, and the output of angular
position or velocity can be measured by the oscilloscope. Figure 1-2 shows the MS150 system.
In these experiments, we will begin with the close loop DC motor position control system setup,
power source and DC voltage measurement, use of potentiometers (attenuator, input pot and output
pot), Op-amp as a signal adder .
Exp#1.1 Basic DC Motor Angular Position Control System Setup
1. Referring to Figure 1.1 block diagram, make connection as following Figure 1-6: Op Amp
OP150A will be used as a “signal adder” to detect the error signal between “command” IP150H and “real position”- OP150K. The error signal will be used to control how far and
which direction motor to run. Please note that this error signal can’t directly drive motor. It
has to be adjustable (by a Controller-AU150B used as a proportional controller). This
control signal will be amplified by “Power amplifier” (Pre-Amp PA150C and Servo-Amp
SA150D). This amplified power (voltage and current) will drive motor.
2. Check control stability: no function generator connection, adjust AU150B dial to 1 or less,
turn IP150H to 45 degree clockwise, check if OP150K follow the IP150H clockwise. If not,
re-check your connection, especial the IP150H and OP150K are cross-connected. If still
doesn’t work, ask your lab demonstrator to check your connect. Make sure the system is a
stable negative feedback position control system.
3. Increase the dial of AU150B, the system will become unstable, decrease the dial of
AU150B, the system will be stabilized and will stop response when dial to 0.
4. Disconnect the wire at the #3 of IP150H and connect to Function Generator output as shown
in dashed line. The function generator will be used as a command signal. Set function
generator: Square wave, High: 3v, Low 0, Offset 1.5v. Frequency: 0.5Hz.
5. Oscilloscope setting to get a low frequency waveform and measurement. The signal can be
displayed or not displayed by press button 1 and Button 2 above the scale knob. Press button
1: coupling: DC, invert: off, Probe setup: 1x. Press button 2: same as ch1, except for invert:
on. To make signal display correctly on the screen by adjusting the Horizontal Scale (time
scale:S) and Vertical Scale (voltage scale: V) knob. If function generator signal is 3V p-p,
1.5 offset, 0.5 Hz, to get maximum display of 2 cycle signal on screen, the setting is: adjust
position: baseline on bottom of screen, vertical scale: 500 mv, horizontal scale:400ms, as
shown in Figure 1-7.
6. Adjust Attenuator AU150B: dial to 1, capture the response image using excel as shown in
Figure 1-10.
7. Repeat step 6 for dial adjusting to 2, and 0.5.
6
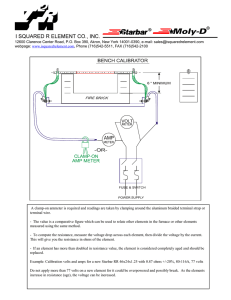
Figure 1-6 Basic DC Motor Angular Position Control System connection
Figure 1-7 Oscilloscope setting
7
Figure 1-8 Oscilloscope Screen capture
Exp#1.2 DC voltage measurement using DMM and Oscilloscope
The objective here is to get variable voltage (signal) output from a fixed power source through
potentiometer (attenuator in our case), monitor and measure it using DMM and Oscilloscope. [In
this case, +15, -15 volt supply should be used as input]
1. Display and measure DC voltage by Oscilloscope and check the reading by DMM: The
oscilloscope used in our lab is a 2 channel oscilloscope. It can display and measure two different
signal sources simultaneously. DMM is 8085A.
Figure 1-9 Attenuator Calibrate Connection
8
Figure 1-10 Attenuator Calibration Scheme
1) Make connection as show in Figure 1-9 and Scheme Figure 1.10. DMM set to: DC, V,
scale: 20, connect V/KΩ/S to terminal #2 of AU150B. com (DMM) to terminal #1 of
AU150B.
2) Scope Ch1 red terminal connect to output of attenuator (terminal #2 in AU150B), Ch1 black
terminal to the com (#1 of AU150B). Ch2 red to #5 in AU150B.
Note: only one “ground” in scope is connected to circuit common. In later Figures of
Scope connections, Ground connections maybe not shown, but still need to connect one
Ground.
3) To make signal display correctly on the screen by adjusting the Horizontal Scale and
Vertical scale knob. On the bottom of screen, it display: CH1 2.00V, CH2 2.0V, 20ms.
The signal can be displayed or not displayed by press button 1 and Button 2 above the scale
knob. Press “1” button, choose: Coupling: DC, Invert: off, Probe: 1x.
4) Push the MEASURE button to see Measure menu. Push Add Measurements: Select type:
MEAN , Select CH1 for first measurements Source. Then OK Add Measurement.
9
5) Select CH2, select Type: MEAN. OK Add Measurement again, The CH1 and CH2 mean
values are shown in the menu and are updated periodically. If it is a question mark or not
display, clockwise turn the Time scale until it is in auto run mode.
2. Adjust top pot knob from 0 position to 10 position and record voltage from CH1 mean, check
with DMM and fill out the following table.
3. Repeat Step 2 by adjusting the bottom pot knob, and record from CH2 mean.
Top knob
Position
0
1
2
3
4
5
6
7
8
9
10
Voltage
input (#3)
V in
15 v
15 v
15 v
15 v
15 v
15 v
15 v
15 v
15 v
15 v
15 v
Voltage
output(#2)
V out CH1
K1 (gain)
Vout/Vin
Bottom
knob
Position
0
1
2
3
4
5
6
7
8
9
10
Voltage
input (#6)
V in
-15 v
-15 v
-15 v
-15 v
-15 v
-15 v
-15 v
-15 v
-15 v
-15 v
-15 v
Voltage
output(#5)
V out CH2
K2 (gain)
Vout/Vin
Exp#1.3 Calibration of Input, Output Potentiometers
1) Apply +15 and – 15 volts to the Input and Output pots (150H and 150K) exactly as shown in
Figure 1-11, noting the physical 'cross-connection' with respect to the pot terminal polarities*.
Rotate the pot shafts until each output is zero volts.
[Note that the Output pot shaft can be rotated only by turning the motor shaft which is
between DCM150F and GT150X. DO NOT FORCE THE SHAFT WHICH IS CONNECTED
TO THE OUTPUT POTENTIOMETER]. Check that the graduated disc attached to the pots
indicates zero degree position, and the voltage output of each pots should be zero volt, if not, record
the angle and use it as an offset. Don’t force to adjust disc to zero.
*Note: This 'cross-connection' is necessary in the final setup (close loop control setup), since both pots are rotated in
the same direction, their outputs will be with opposing polarities. Thus, if the outputs are summed (as is done in the lab
10
by the operational amplifier module 150A), the op-amp output indicate the error in angular position between the two
potentiometers. The op-amp thus serves as the error detector. If the two pots are physically identical, then setting both
to the same angular position should result in zero output from the op-amp. The generation of the error signal is observed
in the next step.
2) Rotate input pot shaft in steps and record the output voltage from IP150H #3(CH1 mean), fill
out the following table.
3) Repeat step #2 for output pot, rotate motor shaft (not Disc) to change the disc position.
Figure 1-11 Input and output pot
calibration setup
Input Pot position
(150H) 𝜃𝜃𝜃𝜃 ( Degree)
Figure 1-12 Input and Output pot
Voltage From #3
Vi CH1 (volt)
Output Pot Position
(150K) 𝜃𝜃𝜃𝜃 (Degree)
-170
-120
-120
-90
-90
-60
-60
-30
-30
-10
-10
0
0
10
10
30
30
60
60
90
90
120
120
170
*turning the pot clockwise for positive polarity
11
Voltage from #3
Vo CH2 (volt)
Exp#1.4 Observation of the Error Signal
1. Zero Op-Amp (Figure 1-13): Connect a Ground
(0 volt) signal to one of the op-amp inputs (leave
the other two inputs open). Then adjust the “zero
set” knob so the output of the op-amp is zero.
+15
0V
-15V
2. Remove the ground signal from #1 of Op-amp.
Connect the input and output potentiometer as in
Figure 1-15. Rotate the output pot shaft
approximately to V0= 1 V position. Use DMM to
check Vo.
3. With the output potentiometer position left
undisturbed, from start point position (0 degree),
vary the input pot position by slowly turning the
knob and observe the change in Op-amp output.
Fill out the following table.
CH2
Figure 1-13
Zero Op-Amp
Figure 1-14 Op-Amp as a Summing and Error Signal Block Diagram
Figure 1-15 Op-Amp Calibration and Error Signal connection
12
output pot
Vo
(DMM)
input Pot
Position
(Deg)
1v
1
1
1
1
1
1
-170
-90
-45
0
45
90
170
input Pot
Vi
CH1
Op-Amp
Output Ve
CH2
Erro (Cal)
Ve= -(Vi+Vo)
Difference of
Ve(cal) &
Ve(real)
Experiment Results
Exp#1.1 Basic DC Motor Angular Position Control System Setup
1) Simulate the system using the block diagram as in Figure 1.1 by Matlab Simulink. Get 3
0.088𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉
step (𝜃𝜃𝑑𝑑 =40 deg.) responses of k1=0.5, k1=1, and k1=2 (Assume: 𝐾𝐾𝑖𝑖 = 𝐾𝐾𝑜𝑜 ≈
≈
𝑑𝑑𝑑𝑑𝑑𝑑
4.8
, 𝐾𝐾𝑝𝑝 ≈ 10, 𝐾𝐾𝑚𝑚 = 𝐾𝐾𝑀𝑀 ∗ 𝐾𝐾𝑆𝑆𝑆𝑆𝑆𝑆𝑆𝑆 ≈ 20 ∗ 6 = 120 𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣/𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣, 𝜏𝜏𝑚𝑚 = 0.1𝑠𝑠, N=30).
2) Compare above simulated responses with experimental response and comments.
𝑟𝑟𝑟𝑟𝑟𝑟
Exp#1.2 Calibration of Attenuator
1) Explain how to measure a DC voltage using DPO2012 Oscilloscope?
2) Obtain the calibration curves showing the Pot Coefficient k =Vout/ Vin versus scale
reading(knob position). The plots yield the correct value of k1 and k2 to be used.
3) If we need a variable voltage out 0 ~ 0.5v, but we only have a power supply which can give
fix +15v output. Can we use two attenuators to do so (the second attenuator must output
0~0.5v by adjusting knob position 0~10). How to connect? Referring Figure 1-9, draw your
connection similar as Figure 1-9.
Exp#1.3 Calibration of Input, Output Potentiometers
1) Obtain the calibration curve of output voltage versus input angle in both directions from
zero, and hence calculate the sensitivities Ki and Ko of the two pots in volts/rad. If the two
values are close to each other, the average value may be calculated.
2) What is the “cross connection” mean in experiment.
3) Can you explain which is input signal, which is output signal for IP150H. How can you give
input, what is the unit, how and where can you get output, and what is the unit.
4) Can you explain which is input signal, which is output signal for OP150K. How can you
give input, what is the unit of input, how and where can you get output signal, and what is
the unit of output.
Exp#1.4 Observation of the Error Signal
1) Explain how to check if the op-amp is zero or not. Can you use DMM to do? Please explain
in detail.
2) From above experimental results table, explain how to make connection to get a signal
subtraction.
3) Referring Figure 1-14 and 1-15, if we switch the connection of IP150H (#1 to +15, #2 to 15). What is the effect on Ve error signal?
13
Lab 2: Determination of DC Motor Dead-Band,
Gain, Servo-Amplifier Gain, Torque/Speed
Characteristic.
Objectives
To familiar with the DC motor module, amplifiers and tachometer. To verify DC motor parameters,
calibrate the gain of Pre-amplifier, Gain of servo-amplifier and tachometer.
Introduction
Preamplifier PA150C (Figure 1-6) is a low-power control amplifier which is used to provide the
"deadband compensation" voltage, as well as a fixed forward-path gain Kp. The module has two
summing input terminals and two output terminals. {An additional input terminal labelled "Tacho"
may also be present.} A positive voltage applied to either input yields an amplified positive voltage
at the upper output socket(3),the socket(4) staying near zero; a negative voltage applied to either
input yields an amplified positive voltage at the lower output socket(4), the socket(3) staying zero.
The two output terminals provide the positive voltage drive required as input for the servoamplifier. Thus, if the output terminals are
connected to the servoamplifier input terminals, the
motor will reverse direction whenever the
preamplifier input voltage changes polarity.
With zero input, the voltages at both output sockets
must be equal, and this condition must be achieved
by adjusting the Zero Set control on the
preamplifier.
{ PROCEDURE: Power on preamplifier. With
the input terminals left open circuited, adjust the
Zero Set knob until the differential voltage
between the two output sockets is zero, i.e., until
the voltages at the two output sockets are
equalized}. The preamplifier must remain
reasonably balanced for proper operation. Maximum
output is about 12 volts, and the linear voltage gain
is about 10 to 15 V/V.
Figure 2-1 Preamplifier PA150C
'Deadband' occurs due to the presence of mechanical static-friction (Coulomb-friction) effects in the
commutator brushes and in the bearings. The term 'deadband' which essentially is "the no-response
of the motor until the servoamplifier[motor] input voltage Vm, exceeds a certain value Vd " [see
Figure 2-2 (a)] occurs in both rotational directions. The 'deadband' prevents the modeling of the
servomotor as a linear element. In the experimental equipment, the motor is 'linearized', by
providing the servoamplifier input with a bias voltage Vb which is approximately equal to the
deadband voltage. The required bias is obtained from a pre-amplifier which has the transfer
14
characteristic shown in Figure 2-2(b). The bias voltage Vb is somewhat less than Vd in order to
prevent motor response due to spurious noise signals which may be present in the preamplifier
output. At balance, identical output voltages of 1 to 1.5 volts should be obtained.
Figure 2-2 (a) Motor Deadband Vd
(b) Preamplifier Bias Vb
Servoamplifier SA150D is the power-amplifier which
drives the motor. Its panel shows a simplified schematic
of the amplifier. The left side of the panel contains two
input terminals which accept only positive input signal
voltages: A positive input voltage [exceeding the
deadband voltage], when applied to one input terminal
will rotate the motor in one direction, a similar positive
voltage applied to the other terminal will produce
reverse rotation. Negative inputs will have no effect. The
panel also contains a set of ± 15v terminals which can be
used by other units. The servoamplifier is already
connected to the power supply unit by a cable, and does
not require further power connections.(Figure 2-1)
Vin
=V1
Vin
=V2
DC Motor DCM150F & Reduction Gear Tacho Unit
GT150X consists of a DC motor mechanically coupled
Figure 2-3 Servoamplifier
to a tachogenerator on high speed input end,( tachometer
SA150D
sensitivity is 0.025 Volts per radian-sec-1 and its output
polarity can be reversed
by appropriate
patching), through a
30:1 reduction gear (a
90° worm gear
assembly), to an output
shaft on the other end.
The output shaft is
coupled to the Output
Potentiometer through a
coupling link. A top
panel display can be
Figure 2-4 DC Motor DCM150F coupled Tacho- gear
switched to indicate
GT150X, Loading Unit LU150L
speed in r/min or to
15
monitor an external DC voltage. The motor is operated in the armature-controlled mode, through
appropriate patch-cord connections made on the Servoamplifier. The motor is already connected to
the Servoapmplifier by cables, and does not require further power connections.
The motor is a permanent magnet type and has a single armature winding. Current flow through the
armature is controlled by power amplifiers as in Figure 2-1 so that rotation in both directions is
possible by using one, or both of the inputs. The input signals are provided by a specialized PreAmplifier Unit PA150C, which connected to inputs #1 and #2 on SA150D.
As the motor accelerates the
armature generates an
increasing ‘back-emf’ Va
tending to oppose the driving
voltage Vin. The armature
current is thus roughly
proportional to (Vin – Va). If
the speed drops (due to
loading) Va reduces, the
current increases and thus so
does the motor torture. This
tends to oppose the speed
Figure 2-5 a DC Motor Deadband
drop. This mode of control is
called ‘armature-control’ and
gives a speed proportional to
Vin as in Figure 2-5 a. Due to
brush friction, a certain
minimum input signal is needed
to start the motor rotating.
Figure 2-5 b show how the
speed varies with load torque.
Loading Unit LU150L An
aluminum disc can be mounted
on the extended motor shaft and
when rotated between the poles
of the magnet of the loading
unit, the eddy currents
generated have the effect of a
brake. The strength of the
magnetic brake can be
controlled by the position of the
magnet (Figure 2-4). Figure 2-6
show the approximate brake
position characteristics of motor
at 1000 rpm. For other speeds,
the torque will be proportional to
the speed.
Figure 2-5 b DC Motor
Speed-Torque Character
Figure 2-6 Approximate Brake Characteristics at 1000rpm
16
The armature-controlled DC Motor is used in the laboratory equipment. The motor is driven by a
servoamplifier [the combination of the two being called a 'Servomotor’]. The transfer function can
be written as follow:
𝐺𝐺𝑃𝑃 (𝑆𝑆) =
𝜔𝜔𝑚𝑚
𝑉𝑉𝑚𝑚
=
𝐾𝐾𝑚𝑚
(2-1)
1+𝑆𝑆𝜏𝜏𝑚𝑚
where 𝝎𝝎𝒎𝒎 is the output angular
velocity, Vm is the motor input
voltage(between #3 and #4 on
SA150D), Km is the motor gain
constant and 𝜏𝜏𝑚𝑚 is an equivalent
electro-mechanical time constant. The
two characteristic constants in (2-1)
can be experimentally determined. The
block diagram is shown in Figure 2-7.
Experiment Procedure
In these experiments, we will calibrate
the Pre-amplifier gain, servo-amplifier
gain, determine motor dead-band,
investigate brake characteristics and
servomotor time constant.
Figure 2-7 Block Diagram:
SA150D+DCM150F+ GT150X
Exp#2.1 Determination of Preamplifier Bias and Gain
1. Balance the Preamplifier and determine Preamplifier Bias: Power PA150C, connect a
common signal (0V) to the inputs (input 1 and 2). Monitor (using the oscilloscope and its
measurement feature, scope vertical position and scale should be same) both outputs (3 and 4),
adjust the Balance Control (zero set knob) until both outputs have the same voltage, as shown in
Figure 2-8, This voltage should be in the range of 1.0 to 1.5 volts and is the "bias" voltage which is
intended for overcoming part of the system Deadband. The zero set knob should not be disturbed
after balancing. Record the bias value.
2. Set up the circuit to obtain a small voltage signal: as shown in Figure 2-9 using the Attenuator
modules. Note that the pots in the Attenuator are connected in cascade so that very small DC
voltages required as input for the gain determination can be easily obtained. Set top pot 1.5 volt
(after get 1.5V at #2, don’t touch the top knob any more), then bottom pot will yield an output of 0
to 1.5 volt over its entire knob-rotation range at socket 5. If -15V connect to # 3, then # 5 can
obtain an output of 0~ -1.5V.
3. Preamplifier Gain: Disconnect the common signal from the pre-amp input #1, and connect the
signal from the bottom pot #5 as show in Figure 2-10. Apply various voltages to the preamplifier
input #1, check with scope CH1. Connect PA150C output #3 to scope CH2. Leave input #2 and
output #4 unconnected. Vary input signal from 0~1.5 by turning bottom knob, (Oscilloscope:
press “measure”, Source: CH1, Type: mean. Second side menu: Source: CH2, Type: mean,
properly adjust voltage and time scale to get reading from Scope), record data at the following
table. Then disconnect +15V on AU150B #3, and connect -15V to AU150B #3, thus a variable
17
signal (varies from 0~ -1.5V) can be obtained at #5 on AU150B and at input #1 on PA150C, the
amplified signal output to PA150C output #4,CH2 connect to #4 of PA150C, leave input 2 and
output 3 unconnected, record data at the following table. (Fig. 2-10 Dash line)
Figure 2-8 Balance PA150C
Figure 2-9 Using AU150B
get small variable Signal
Figure 2-10 Preamplifier Calibration Connection
18
Input Voltage
CH1 Volt (mean)
Input terminal #
1
1
-1.5 (real reading here)
-1.2
4
4
1
-1.0
4
1
-0.8
4
1
-0.6
4
1
-0.4
4
1
-0.2 ↑ (
1
Output Voltage
CH2 Volt (mean)
Output Terminal #
)
4
)
3
0
1
0.2 ↓ (
1
0.4
3
0.6
3
1
0.8
3
1
1.0
3
1
1.2
3
1
1.5
3
1
Exp#2.2 Servomotor Gain, Deadband and Tachometer sensitivity Determination
1. Set up the circuit as shown in Figure 2-11. Apply 1.5 ~ 2.5 volts (using top attenuator AU150B)
#3 connect from +15v, #1 connect from 0V, #2 connect to input #1 on Servo-amp SA150D ,
Scope CH1 measure input voltage Vin at #1 on SA150D. DMM measure motor control voltage
Vm between #3 and #4 on SA150D.
2. GT150X connection: #1 from 0V, #2 connects to #3, switch turn towards to #3 for display n
(rpm) on LED, Scope CH2 measure tachometer voltage at #2.
3. Set Load unit LU150L at 0 position (unload status).
4. Gradually increase (adjust AU150B) input voltage allowing the motor to start to turn. Note that
the motor does not respond until the input voltage exceeds a certain threshold value Vd, which is
the deadband voltage for one direction. Continue to increase the input voltage approximate to
1.1V (read mean from CH1 of scope Vin), read Vm from DMM, read n (rpm) on the LED display,
read CH2 mean volts Vt and record all values on the following table.
5. Repeat step 3, increase input voltage approximate to 2.0V.
6. Disconnect #1 on SA150D, connect to #2 instead, the motor will run in opposite direction, repeat
step 4-5.
Servo – Amp
Terminal
#
#1 (≈ 1.1)
#1 (≈ 2.0)
#2 (≈ 1.1)
#2 (≈ 2.0)
Vin Volts
(CH1) mean
Tachometer
Vm Volts
(DMM)
n rpm
(read LED)
19
𝜔𝜔=2𝜋𝜋𝜋𝜋/60
( Rad/S)
Vtg Volts
(CH2)mean
𝐾𝐾𝐾𝐾𝐾𝐾 = 𝑉𝑉𝑉𝑉/𝜔𝜔
Volts.S/rad
Figure 2-11 Servo-motor gain, DC Motor Deadband, gain, Time
constancy, and load characteristics investigate connection
7. Put Load unit LU150L at position#10, repeat from above step #4, adjust Vin at 1.1V, 2v. fill the
following table
Servo – Amp
Terminal
#
#1 (≈ 1.1)
#1 (≈ 2.0)
Vin Volts
(CH1) mean
Tachometer
Vm Volts
(DMM)
n rpm
(read LED)
𝜔𝜔=2𝜋𝜋𝜋𝜋/60
( Rad/S)
Vtg Volts
(CH2)mean
𝐾𝐾𝐾𝐾𝐾𝐾 = 𝑉𝑉𝑉𝑉/𝜔𝜔
Volts.S/rad
#2 (≈ 1.1)
#2 (≈ 2.0)
Exp#2.3 Torque speed Characteristics investigate
1. Set up the circuit as shown in Figure 2-11. Follow the steps 1-2 of Exp#2.2.
2. Set Load Unit at position #0. Gradually increase (adjust AU150B) input voltage, read LED,
make speed n reach to maximum speed. Record all data in follow table of position #0.
3. Keep input voltage unchanged, set load unit LU150L at position #1, record all data, repeat until
position #10.
20
Load
Position
Servo – Amp
Vin Volts
(CH1) mean
Vm Volts
(DMM)
n rpm
(read LED)
0
Tachometer
𝜔𝜔=2𝜋𝜋𝜋𝜋/60
( Rad/S)
Vt Volts
(CH2)mean
1
2
3
4
5
6
7
8
9
10
4. Set Load unit LU150L at position#0, decrease input voltage Vin until reach to above speed at
position#10(if above table at position#10 is 900rpm,adjust vin at position #0 until rpm reach to
1000), record all data in following table, repeat until position #10.
Load
Position
0
Servo – Amp
Vin Volts
(CH1) mean
Vm Volts
(DMM)
n rpm
(read LED)
Tachometer
𝜔𝜔=2𝜋𝜋𝜋𝜋/60
( Rad/S)
Vt Volts
(CH2)mean
1
2
3
4
5
6
7
8
9
10
5. Repeat step 4: set load unit LU150L, adjust Vin at position #0, until rpm reach to the speed at
above position #10, record all data in following table, repeat until position #10.
Load
Position
0
Servo – Amp
Vin Volts
(CH1) mean
Vm Volts
(DMM)
n rpm
(read LED)
1
2
3
4
5
6
7
8
9
10
21
Tachometer
𝜔𝜔=2𝜋𝜋𝜋𝜋/60
( Rad/S)
Vt Volts
(CH2)mean
Exp#2.4 Servomotor Time Constant Determination:
1.
Function Generator and Oscilloscope Setting:
1) The function generator is used to get a square-wave signal. Adjust Frequency(Period,
press again to switch to Period), Amplitude(HiLevel), Offset, (LoLevel) and Duty Cycle
of these signals. Signal: Frequency: 0.3Hz; HiLevel:2.0v; Lolevel: 0v; Offset:1.0v.
2) Use the circuit shown in Figure 2-11. Function generator(dash line) replace AU150B
#2(Green line)
3) Set Oscilloscope to operate in Roll Mode(400ms/div ~5 sec/div) which produce a
scrolling trace. Adjust the position knob of CH1 and CH2 of DSO to bottom
position(baseline at bottom) . Scope setting: Scale CH1: 500mv;CH 2:1.00V; Horizontal
scale: 40ms.
2. Set load unit LU150L at position #0. Use the circuit shown in Figure 2-11. Squire wave
signal replace AU150B #2, connect to #1 on Servo-Amp SA150D as shown in dashed line
3. Power on motor make sure motor run in one direction and full stop periodically. A trace of
squire wave will roll on screen. Adjust oscilloscope Vertical Scale(volts/div) and time scale
(sec/div) controls until the positive-going half-cycle of the square wave appears as a 'step' in
the display [see Figure bellow]. Press Run/Stop ** button in Scope to display the rising
wave form. Use the paired cursors to graphically determine the servomotor time constant 𝜏𝜏𝑀𝑀
by reading off the time corresponding to 63.2 % of the 'final' value*. Draw the display and
mark the time constant and final value, fill out the following table.
* How to get Time Constant using Cursor measurement:
1) From Scope, Press Cursor: two vertical cursor with cross bars will display for paired
measurement: using “Milipurpose a or b” to move cursor, press “Menu 1 or 2”, the
cursor will move along signal of CH1 or CH2. The ∆𝑥𝑥𝑥𝑥𝑥𝑥 𝑚𝑚𝑚𝑚 is the time measurement of
these two cursors. The ∆𝑥𝑥𝑥𝑥𝑥𝑥 𝑚𝑚𝑚𝑚 is the voltage measurement of these two cross bars.
Put “a” to initial point of signal CH2, “b” to final or stead state of tachometer, The
∆8.96𝑉𝑉 is Vt as following graph:
22
2) Refer to graph above, find the cursor of 63.2% of Vt( e.i. if Vt=8.96v, the 63.2% of Vt is
8.96*0.632=5.66 v, move second cursor “b” to ∆5.68𝑉𝑉), The ∆29.6𝑚𝑚𝑚𝑚 is the time
constant. Draw a graph of this waveform and measurement.
3) Press Menu 1, the cursor will move along signal of CH1, refer to graph bellow, using
“Milipurpose a” to move cursor to low signal of CH1, “b” to high signal of CH1, The
∆3.96𝑉𝑉 is Vm as shown in following graph:
4)
4. Connect function generator to #2 of Servo-Amp and to make sure motor run in reverse
direction and full stop periodically. Repeat the steps #2). Fill out table’s second row.
Load unit set at position #0
V Function Gen.
0~2 V
-2~0V
Vin (CH1)
Tachometer (Vt CH2)
Time Constant 𝜏𝜏𝑚𝑚
5. Repeat Step #1, Set load unit LU150L at position #10, repeat step #2 and #3.fill following
table.
Load unit set at position #10
V Function Gen.
Vin (CH1)
Tachometer (Vt CH2) Time Constant 𝜏𝜏𝑚𝑚
0~2 V
-2 ~0V
23
********** Alternate method to get one shot wave form*****************
1) Scope setting: Scale: Ch1: 1.0V; Ch2: 2V, Horiaontal time scale: 40 ms,
2) Press Scope “Trigger Menu”: Type: Edge, Source: CH1, Slope: Rising (Falling
depending on waveform), Mode: Auto, Couple: DC. Trigger level set to +1.0v for
rising wave or -1.0v for falling wave.
3) Run motor by turn power. Press Scope: Single, A rising (or falling waveform) will
display and freeze on screen. Now you can use cursor to measure it.
Experiment Results
Exp#2.1 Determination of Preamplifier Bias and Gain
1) Can you explain which terminal is input, which is output if we use AU150B as a voltage
divider. Do we need a ground, explain why.
2) Obtain a plot of output voltage (terminal 3) versus input voltage from 0~ +1.0 V (input
terminal #1). Next, on the same graph, plot other output (terminal #4) versus Vin from 0 ~ 1.0V (input terminal #1). A V-shaped characteristic will result if the preamplifier has been
well balanced. Find Kp (slope of plot). Find preamplifier bias voltage when Vin =0 from the
plots.
Exp#2.2 Servomotor Deadband and Gain Determination
2𝜋𝜋𝜋𝜋
𝑉𝑉𝑉𝑉
𝑆𝑆
1) From the table, calculate 𝜔𝜔 and Kt, 𝜔𝜔 =
(Rad/s), 𝐾𝐾𝐾𝐾 = (𝑉𝑉𝑉𝑉𝑉𝑉𝑉𝑉.
).
60
𝜔𝜔
𝑅𝑅𝑅𝑅𝑅𝑅
2) Plot 𝜔𝜔 versus Vm in both input terminal #1 and #2 in one graph. Find Vd (deadband) from
this plot.
3) Plot 𝜔𝜔 versus Vin, find Km for position#0. What is the difference compare with no
load(position#0), why.
4) Find Km for Position#10. What is the difference compare with no load(position#0), why.
5) Can you derive a block diagram model of armature-controlled DC motor, includes a load
torque in your block. (referring to Appendix B for all parameters). Clear indicate Km, 𝜏𝜏𝑚𝑚 .
6) Run matlab Simulink with 5) block diagram.
24
Exp#2.3 Torque speed Characteristics
1) Plot 𝑛𝑛 (𝑟𝑟𝑟𝑟𝑟𝑟) versus position # to get the speed toque characteristics from all setting. (plot
three curve in one graph).
Exp#2.4 Servomotor Time Constant Determination
1) From the recorded table and plot, get average time constant.
2) Find servomotor gain from the final value and input square-wave amplitude. Refer to (2-1)
and Figure 2-7,
𝑉𝑉𝑉𝑉
𝑉𝑉𝑉𝑉𝑉𝑉
=
𝐾𝐾𝐾𝐾∗𝐾𝐾𝐾𝐾
1+𝑆𝑆𝜏𝜏𝑚𝑚
𝑉𝑉𝑉𝑉
, when t∞, S0, 𝐾𝐾𝐾𝐾 = 𝑉𝑉𝑉𝑉𝑉𝑉∗𝐾𝐾𝐾𝐾 . Compare this Km with
obtained from Exp#2.2(Question# 4).
3) Using above obtained parameters to simulate the DC motor with Matlab Simulink. Compare
with experimental plot, with #2.2 –6) Simulink result.
25
Lab 3: Time Response of Basic Closed-Loop
System and Effect of Tachometer Feedback
Objectives
To observe the time response of the closed-loop DC motor position control system, investigate the
performance of second order system, and effect of tachometer feedback on the second-order system
response.
Introduction
Basic Angular Position Control System:
The block diagram of the basic system which is investigated is shown in Figure 3-1. The speed
reducing gear coupled at the output shaft of the motor is represented as a block having the transfer
function (1/SN), to indicate speed reduction as well as angular velocity - to - position conversion.
Ki and Ko are the transfer functions of the Input and Output potentiometers, Kp is the pre-amp
gain, and Km is the servo-motor gain respectively, which were obtained by calibration in the
previous lab.
𝑲𝑲𝒎𝒎
𝟏𝟏 + 𝑺𝑺 𝝉𝝉𝑴𝑴
𝜽𝜽𝒅𝒅
Figure 3-1
150 X
Gear Box
𝜽𝜽𝒐𝒐
Basic Angular Position Control System
The op-amp 150A is used to sum multi-signals as “Reference Comparator” or “Error Detector”.
The error voltage Ve is the difference between desired voltage Vi and real voltage Vo (or = 𝐾𝐾𝑖𝑖 𝜃𝜃𝑖𝑖 −
𝐾𝐾𝑜𝑜 𝜃𝜃𝑜𝑜 ).
The close loop transfer function of the system of Figure 3-1 (including Ki) may be obtained as:
26
𝜃𝜃𝑜𝑜
𝜃𝜃𝑖𝑖
=
𝐾𝐾 𝐾𝐾 𝐾𝐾
(𝐾𝐾 𝑖𝑖 ) 𝑀𝑀 𝑜𝑜
𝑜𝑜 𝑁𝑁𝜏𝜏𝑚𝑚
𝑆𝑆 𝐾𝐾 𝐾𝐾
𝑆𝑆 2 + + 𝑀𝑀 𝑜𝑜
𝜏𝜏𝑚𝑚 𝑁𝑁𝜏𝜏𝑚𝑚
=
𝐾𝐾
2
(𝐾𝐾 𝑖𝑖 )𝜔𝜔𝑛𝑛
𝑜𝑜
2
𝑆𝑆 +2𝜁𝜁𝜔𝜔
𝐾𝐾𝑀𝑀 𝐾𝐾𝑜𝑜
Where the Natural Frequency is 𝜔𝜔𝑛𝑛 = �
(3-1)
2
𝑛𝑛 𝑆𝑆+𝜔𝜔𝑛𝑛
(3-2)
𝑁𝑁𝜏𝜏𝑚𝑚
𝐾𝐾𝑀𝑀 = 𝐾𝐾𝑝𝑝 𝐾𝐾𝑚𝑚 , and the Damping Ratio is 𝜁𝜁 = �
𝑁𝑁
(3-3)
4𝐾𝐾𝑜𝑜 𝐾𝐾𝑀𝑀 𝜏𝜏𝑀𝑀
Transient time response specifications to a step input are defined as follows (refer to Figure 3-2):
1.4
𝜽𝜽(𝒕𝒕)
1.2
P.O
O.S
tr
𝜽𝜽𝜽𝜽
X2
1
𝜽𝜽𝜽𝜽
X1
0.8
2%
X3
𝜽𝜽𝜽𝜽
0.6
0.4
tp
T
0.2
0
ts
0
4
2
6
8
10
12
14
16
18
20
𝒕𝒕
Figure 3-2 Time Response of Basic Angular Position control System
Period Time: 𝑇𝑇 =
2𝜋𝜋
𝜔𝜔𝑑𝑑
where the damped natural frequency is 𝜔𝜔𝑑𝑑 = 𝜔𝜔𝑛𝑛 �1 − 𝜁𝜁 2 .
Rise time, tr: the time required for the response to rise from 0 ~ 100% of its final value for a
underdamped second-order system.
Peak Time: 𝑡𝑡𝑝𝑝 = time taken to reach the first maximum, 𝑡𝑡𝑝𝑝 ≈
27
𝜋𝜋
𝜔𝜔𝑑𝑑
Percent Overshoot (P.O.): the maximum peak value of the response curve measured from unity.
𝑃𝑃. 𝑂𝑂 = 100𝑒𝑒
−
𝜋𝜋𝜋𝜋
�1−𝜁𝜁2
(3-4)
Settling Time: the time required for the response curve to reach and stay within a range about the
final value of size specified by absolute percentage of the final value (usually 2% or 5%).
𝒕𝒕𝒔𝒔 ≈ 𝟒𝟒/𝜻𝜻𝝎𝝎𝒏𝒏 , (2% settling time)
The time-domain specifications are quite important since most control systems must exhibit an
acceptable time response. Except for certain applications where oscillations cannot be tolerated, it is
desirable that the transient response be sufficiently fast and be sufficiently damped. Thus, for a
desirable transient response of a second-order system, the damping ratio must be between 0.4 and
0.8. Small values of 𝜁𝜁 (𝜁𝜁 < 0.4) yield excessive overshoot in the transient response and a system
with a large value of 𝜁𝜁 (𝜁𝜁 > 0.8) responds sluggishly. An overshoot in the range of 2 to 6% is
considered to be the optimum, a ‘range’ being necessary because setting the P.O. may involve a
‘trade-off’ with other specifications.
Note that an increase in KM, while providing an increase in the natural frequency (ie. speed of
response or rise-time), will also result in a reduction in the damping ratio, thereby increasing the
tendency towards instability (ie. larger overshoot and settling time). Thus, a 'trade-off’ exists
between, say, the rise-time and the settling time. Furthermore, in the experimental setup, all of the
above system parameters are constant and any adjustment capability can only be obtained through
an effective variation in the forward-path gain. In the experimental setup, such a gain- variation is
obtained by an attenuator which is ahead of the pre-amplifier (see Figure 3-3) to effectively reduce
the gain of that amplifier (ie. 0< overall forward-path gain ≤ KM , in our case, KM=K1KpKm , where
K1 is the potentiometer constant which was calibrated in previous lab and ranged from 0 to 1)
Basic angular position control system with velocity feedback:
The restrictive trade-off situation between 𝜁𝜁 and 𝝎𝝎𝒏𝒏 in the basic system described above may be
somewhat improved by using additional 'derivative feedback'. In obtaining the derivative of the
output position signal, it is desirable to use a tachometer instead of physically differentiating the
output signal. In our lab, the angular velocity of the motor 𝜔𝜔𝑚𝑚 (Tachometer feedback or Velocity
feedback or Rate feedback) is introduced. In the laboratory system, a ‘tachogenerator’
(Tachometer) is physically coupled to one end of the motor. It produces a DC voltage output 𝑉𝑉𝑡𝑡 =
𝐾𝐾𝑡𝑡 𝜔𝜔𝑚𝑚 , which is used as an additional negative feedback signal as shown in Figure 3-3.
This system can be shown to have the same transfer function given by Eqn. (3-1) where 𝜔𝜔𝑛𝑛 remains
unchanged but with 𝜁𝜁 now given by:
𝜁𝜁 = �
𝑁𝑁
4𝐾𝐾𝐾𝐾𝐾𝐾𝑀𝑀 𝜏𝜏𝑀𝑀
(1 + 𝐾𝐾𝑀𝑀 𝐾𝐾2 𝐾𝐾𝑡𝑡 )
(3-5)
28
The Damping Ratio is now multiplied by the factor (1 + KMK2Kt). Thus, 𝜁𝜁 can now be
independently set for any given 𝝎𝝎𝒏𝒏 . In the laboratory setup, an attenuator (with pot constant k2) is
used in cascade with the tachometer output, so that an effective adjustment range for Kt from zero
to its full value is possible. For the basic system, optimum* step response should normally occur
with the pot coefficients k1=0.4 and K2 = 0.02, respectively. It can be seen that velocity-feedback
improves stability by introducing extra damping.
Figure 3-3 Basic Angular Position Control System with Velocity Feedback
Basic Closed Loop Proportional Speed Control System:
The block diagram of the closed-loop speed control is shown in Fig. 3.4. The feedback signal is the
output velocity signal Vo( or vt), normally from a tachometer, which is compared with a reference
voltage Vi to give an error Ve=Vi-Vo. In our lab, the angular velocity of the motor 𝜔𝜔𝑚𝑚 ,a
tachogenerator’ is physically coupled to one end of the motor. It produces a DC voltage output
𝑉𝑉𝑉𝑉 = 𝑉𝑉𝑡𝑡 = 𝐾𝐾𝑡𝑡 𝜔𝜔𝑚𝑚 ,
Figure 3-4 Basic Closed Loop Speed Control System
29
Experiment Procedure
Pre-lab: Please review Lab#1 and Lab #2 and connect a basic angular position control system with
velocity feedback as shown in Figure 3-3. The lab equipment layout is shown in Figure 1-2. All the
+15V and -15V and 0V voltage will be connected in the lab. The power supply PS150E, servoamplifier SA150D and DC motor DMC150-F are internal connected. Please note that input pot
IP150H and output pot OP150K must be cross connected (referring Figure 1-13). Make sure Ve is a
voltage difference and not a voltage sum. The reference voltage of IP150H and OP150K is ±15V.
Exp #1 Basic Closed-loop System Set Up
Notes: Throughout the following experiments, it will be assumed that the op-amp and the preamp remain zeroed and balanced respectively and that the supplies to the input/output pots
are cross-connected so that the op-amp is the difference between the input and output position
signals.
1) Without power on, set up the circuit as in Figure 3-3. Set the input and output pots to their midpositions, indicating approximately zero output voltages. Also set the two pots in the Attenuator
unit to K1 =0.5, K2 = 0.
2) Offset the reference input pot by about 30° and turn the power on, the output pot will rotate
following the reference pot position if the system is functioning as a negative feedback system. If it
does not, then the feedback signal polarities of position are incorrect and must be reversed as
required until the system shows the proper position following response. (Letting K2=0, check
position feedback first. Switch +15,-15 connect of IP150H to make sure system is controllable and
stable. Then add K2=0.5, if system is unstable, switch the polarities of GB150X.)
3) Disconnect input pot IP150H terminal #3 from terminal #1 of OA150A, connect function
generator to terminal #1 of OA150A. Set square wave, 4V pk-pk, frequency 0.3 Hz. Connect scope
CH1 to Vi, (terminal #1 of OA150A), CH2 to Vo (terminal #2 of OA150A). Set the DSO time base
to produce a scrolling trace (roll mode). Now observe the responses to step input with various
settings of K1 and K2 which are the two control pots in the Attenuator module. Note that K1
effectively sets the forward-path gain (from zero to 1) while K2 sets the magnitude of the
tachometer feedback signal.
4) With K2 remaining at zero (thereby removing the velocity-feedback loop): increase K1 in steps
and observe the change in the transient response. Capture input and output in one plot for same
K2=0 but with K1=0.1, 0.2, 0.4. Try to measure Tp, T and P.O for each case. (using run/stop and
Cursor measurement).
5) Refer to Figure 3-2. record all data, capture the response image and sign data sheet by Lab
instructor before leave.
Exp #2
Closed-loop System with Tachometer Feedback
1) Keep same as above steps 1) -3).
30
2) With K1 set at maximum (=1), observe the change in transient response as the tachometer
(velocity) feedback is gradually introduced by increasing K2. Using RUN/STOP , capture plot for
same K1=1 but with K2=0.1, 0.2, 0.3 or 0.05(if the system shows too sluggish). Also try to measure
Tp, T and P.O for each case.
Exp #3
Closed-loop System Time Response
1) Keep same as Exp#1 steps 1)—3).
2) Select k1 and K2 which yields what you consider to be the 'best' step-response (approximately
10% of overshoot). From the displayed 'best' response curve, use the DSO cursors to graphically
determine the Percentage Overshoot and use it to estimate the damping ratio. Capture image of
this 'best' response for the report.
3) Repeat step 2) for a load position setting #10, Capture the image of this response for the report.
Exp #4
Closed-loop Speed Control System Time Response
1) Without power on, set up the circuit as in Figure 3-4. Connect function generator to terminal #1
of OA150A. Set square wave, Hi level:4V, Low level: -4V, frequency 0.3 Hz. Connect scope CH1
to Vi, (terminal #1 of OA150A), CH2 to Vo (terminal #2 of OA150A). Set the DSO time base to
produce a scrolling trace (roll mode). Now observe the responses to step input with various settings
of K1 which is the top pot in the Attenuator module. Please note the signal flow: Vi generate by
FG, sum by Vo,(take from Tachometer terminal #2), the Error signal Ve connect to K1, top
attenuator #3, then from #2 of AU150B go to PA150C #1. PA150C output #3,#4 connect to
SA150D input #1, #2. Set the load at position 0.
2) Set K1=1(position 10), if system is unstable, switch the polarities of GB150X. check the
response of K1=1, K1=0.5 at load #0. Capture the response images.
3) Put load disk at position #5, set k1=1, and K1=0.5. Capture the image for both cases.
Experiment Results
Exp#1 Basic Closed-loop System Set Up
Write a summary of your observations in your report. Calculate 𝜔𝜔𝑑𝑑 , 𝜔𝜔𝑛𝑛 and 𝜁𝜁 from your recorded
T, Tp, and P.O for each case. Comment on your results.
Exp#2 Closed-loop System with Tachometer Feedback
Write a summary of your observations in your report. Calculate 𝜔𝜔𝑑𝑑 , 𝜔𝜔𝑛𝑛 and 𝜁𝜁 from your recorded
T, Tp, and P.O for each case. Pay attention to 𝜔𝜔𝑛𝑛 . Comment on your results.
Exp #3 Closed-loop System Time Response
1) Estimate two 𝜁𝜁 from your best response experiment by equation (3-4). Compare them with
value calculated using equation (3-5)
𝜁𝜁 = �
𝑁𝑁
4𝐾𝐾𝐾𝐾𝐾𝐾1 𝐾𝐾𝑀𝑀 𝜏𝜏𝑀𝑀
(1 + 𝐾𝐾1 𝐾𝐾𝑀𝑀 𝐾𝐾2 𝐾𝐾𝑡𝑡 )
31
where the selected values of K1 and K2 have been introduced to take into account the effective
modified values of the gain KM= Kp*Km and the tachometer sensitivity Kt. Tabulate the results of
your comparison. N = 30 is the output shaft gear ratio. You can find all the other parameters in your
former experiment results.
2) Use Matlab Simulink to simulate the system as in Figure 3-3. K1 and K2 are the two values used
in the lab (Exp#3, step #3, one is 10% of overshoot, other is 20% of overshoot). N = 30 is the
output shaft gear ratio. You can find all other parameters in your former experiment results. Plot the
simulated results and check the P.O. in graphs. Compare them with your experimental plot.
Exp #4 Closed-loop Speed Control System Time Response
1) Use Matlab Simulink to simulate the system as in Figure 3-4.(Referring to lab #2, Result #2.2,
question #5 ). K1 is the proportional control gain. Torque load should be used by lab#2, and speed
𝝎𝝎. Plot the simulated results and compare them with your experimental plot.
32
Lab 4: Frequency Response of Basic Closed-Loop
DC Motor System
Objectives
To study the frequency response of a basic closed-loop DC motor system by observing its natural
response, and compare the experimental response with computer simulation response.
Introduction
The frequency response means the steady state response of a system to a sinusoidal input. The
resulting output for a closed loop DC motor system is sinusoidal in the steady state; it differs from
the input waveform only in amplitude and phase angle. Consider the DC motor described by
Equation (3-1),
𝜃𝜃𝜃𝜃(𝑠𝑠)
𝜃𝜃𝜃𝜃(𝑠𝑠)
𝜃𝜃(𝑡𝑡) 4
=
2
𝜔𝜔𝑛𝑛
2
𝑆𝑆 2 +2𝜁𝜁𝜔𝜔𝑛𝑛 𝑆𝑆+𝜔𝜔𝑛𝑛
t
𝜃𝜃𝜃𝜃(𝑡𝑡)
3
= 𝐺𝐺(𝑠𝑠)
(4-1)
T
2
𝜃𝜃𝜃𝜃
1
𝜃𝜃𝜃𝜃
0
-1
-2
-3
-4
0
10
20
30
𝜃𝜃𝜃𝜃(𝑡𝑡)
40
50
Figure 4-1 Frequency response of closed loop system
The input 𝜃𝜃𝑖𝑖 (t) is sinusoidal and is given by:
33
𝒕𝒕
60
𝜃𝜃𝑖𝑖(𝑡𝑡) = 𝜃𝜃𝑖𝑖 sin 𝜔𝜔𝜔𝜔
If the system is stable, then the output 𝜃𝜃𝜃𝜃(𝑡𝑡) can be given by
𝜃𝜃𝜃𝜃(𝑡𝑡) = 𝜃𝜃 𝑑𝑑 |𝐺𝐺(𝑗𝑗𝑗𝑗)| sin(𝜔𝜔𝜔𝜔 + 𝜙𝜙)
𝜙𝜙 = ∠G(jω) = tan−1
Where
𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖 𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 𝑜𝑜𝑜𝑜 𝐺𝐺(𝑗𝑗𝑗𝑗)
𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 𝑜𝑜𝑜𝑜 𝐺𝐺(𝑗𝑗𝑗𝑗)
We can present frequency response characteristics in graphical forms, Bode Diagrams or
Logarithmic Plots. A Bode Diagram consists of two graphs: one is a plot of the logarithm of the
magnitude of a sinusoidal transfer function (20 log |𝐺𝐺(𝑗𝑗𝑗𝑗)| ), or called dB; the other is a plot of the
phase angle (deg) or phase shift; both are plotted against the frequency in logarithmic scale.
System: DC
Bode Diagram
Frequency (rad/sec): 10.6
Magnitude (dB): 10.3
20
Magnitude (dB)
10
Mp (in dB)
0
System: DC
Frequency (rad/sec): 15
Magnitude (dB): 0.00225
-10
-20
-30
𝜔𝜔𝑝𝑝
-40
0
Phase (deg)
-45
-90
-135
-180
0
1
10
10
2
10
Frequency (rad/sec)
Figure 4-2
Bode diagram of closed loop DC motor System
An example of input and output sinusoidal waveform is shown in Figure 4-1.
The output/input magnitude ratio:
𝜃𝜃𝜃𝜃
M (dB) =20 log |𝐺𝐺(𝑗𝑗𝑗𝑗)| = 20 𝑙𝑙𝑙𝑙𝑙𝑙 � �
𝜃𝜃𝜃𝜃
34
(4-2)
360𝑡𝑡
Phase shift:
𝜙𝜙(degree) =−
(4-3)
𝑇𝑇
Figure 4-2 shows the Bode Diagram of closed loop DC motor system. We can estimate the
underdamped natural frequency 𝜔𝜔𝑛𝑛 and damping ratio 𝜁𝜁 by the asymptotic lines from Bode
diagram.
1
𝑀𝑀𝑝𝑝 (𝑑𝑑𝑑𝑑) = 20 log
, 𝜁𝜁 < 0.707
(4-4)
2
2𝜁𝜁�1−𝜁𝜁
Experiment Procedure
1) Set up the circuit shown in Figure 3-3, make sure system is controllable and stable, use function
generator to replace input pot 150H. Function generator setting: Squire wave, 4 volts peak-to peak,
0.5Hz, offset 0v. Get step response by setting K1, K2 which yielded your good step-response
(25% of overshoot). Set the oscilloscope to read DC at 1 volt/div and adjust the sec/div setting
until the waveform is scrolling, 100-500ms/div. Turn on the 'invert' for Ch2 of scope.
2) After getting 35% of overshoot, keep all setting unchanged, only adjust function generator
controls to obtain a sine wave output.
3) Keep the peak-to-peak input voltage magnitude unchanged, manually change frequency from
0.1 to 10 Hz, find the resonance peak, more readings will have to be taken near the peak so that it is
well defined in a plot. Conversely, less readings may be taken in regions where the response is
'flat'. At each frequency fin, 'freeze' the signal and use cursors to find the input period T, pk-pk
𝜃𝜃𝜃𝜃, pk-pk 𝜃𝜃𝜃𝜃, and the phase-shift time t between input and output waveforms. Tabulate the results
as shown in Table 4-1.
Experiment Results
1) Calculate the output/input Magnitude Ratio M (dB) and the Phase shift Ф (degrees) at each
frequency and put them into the table above. For an input 𝜃𝜃𝜃𝜃(𝑡𝑡) and an output 𝜃𝜃𝜃𝜃(𝑡𝑡) which lags the
input, the Ф (degrees) and M (dB) may be calculated by (4-3) and (4-4). Plot the Magnitude Ratio
M (dB) and the Phase-lag Ф (degrees) against the radian-frequency ω=2πf, using two-cycle, semilogarithmic graph paper. Example M and Ф plots are shown in Figure 4-2. Typical data points are
also shown to emphasize the need to take more readings at frequencies where rapid changes occur.
Note: A distinct peak will not be obtained if the system is set for near critical damping.
2) Estimation of undamped natural frequency ωn and damping ratio ζ from the resulting frequency
response plot. The magnitude (dB) – frequency data points plotted on semi-log graph paper can be
used to obtain system parameters such as ζ and ωn, as shown in Figure 4-2. Use asymptotic lines to
estimate the ωn and the peak (if any) to find the ζ by (4-4). Compare the result of ζ with the
corresponding value calculated earlier in Lab#3.
3) Use Matlab M scripts to plot the Bode diagram given the system parameters as in the previous
lab. The K1 and K2 are chosen in this lab. Find the 𝜔𝜔𝑛𝑛 and 𝜁𝜁 from the Bode diagram.
35
Table 4-1
Fin
(Hz)
0.1
0.5
1
1.5
1.6
1.7
1.8
1.9
2.0
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3.0
3.5
4.0
5.0
6.0
7.0
8.0
9.0
10.0
T
(sec)
t
(sec)
𝜃𝜃𝑖𝑖 (pk-pk) 𝜃𝜃𝑜𝑜 (pk-pk)
(volt)
(volt)
36
𝜔𝜔
(rad/S)
M
( dB)
Phase
(deg)
Lab 5: DC Motor Position Control with Cascade
PID Compensation
Objectives
To investigate PID controller and cascaded PID with tachometer feedback, compare the
experimental response with computer simulation response.
Introduction
'Compensation' is the modification of system (plant) performance characteristics so that they
conform to certain desired specifications. This is accomplished by effectively changing the transfer
function (more specifically, the OLTF) of the system, by introducing a ‘compensator’ block at some
suitable point in the closed loop. The compensator is usually located near the input comparator,
since the signal levels are low there and hence the compensator can be a low-power device. In
cascade Proportional-Integral-Derivative (PID) compensation, the time-integral and time-derivative
of the comparator output are obtained and added to that output itself and the composite signal is
used as the actuating signal (refer to Figure 5-1).
In the laboratory setup, a Proportional-Integral-Derivative amplifier unit (called PID unit PID150Y)
is used in the forward path, following the reference comparator, for the investigation of cascade
compensation. The Proportional-Integral-Derivative unit PID150Y is a three-mode control
amplifier. It provides three operational paths (P+I) or (P+D) or (P+I+D). The block diagram is
shown in Figure 5-2. Switching possibilities can be readily seen on the simplified schematic shown
on the faceplate of the unit (see Figure 5-2).
This amplifier has the following transfer function:
Gc(S) = K [1 + (1/sTi) + sTd]
(5-1)
where the proportional gain K and the integral and derivative time constants Ti and Td can be
varied over specified ranges by means of three calibrated knobs on the unit. [The gain K can be
varied from 0.11 to 11 in two decade ranges. The Integral Time Constant Ti can be set from 0.11 to
11 seconds (in two decade ranges) and the Derivative Time Constant Td can be set from 2
milliseconds to 220 milliseconds in two ranges. Also, the Integral and Derivative functions can be
independently switched on or off as required.]
37
150A
𝜽𝜽𝒅𝒅
Ki
150H
𝑽𝑽𝒊𝒊
−
150C
𝑽𝑽𝒆𝒆
PID
150Y
PID
Vc
−
𝟏𝟏+𝑺𝑺𝝉𝝉𝑴𝑴
150D
+150F
150C
K2
150B
𝑽𝑽𝒐𝒐
𝑲𝑲𝒎𝒎
Kp
𝑽𝑽𝒕𝒕
Kt
𝟏𝟏
𝑺𝑺𝑺𝑺
150X
𝝎𝝎𝒎𝒎
150X
Ko
150K
Figure 5-1 DC Motor Position Control with Cascade PID + Velocity
Feedback Compensation
Figure 5-2 PID150Y Module
38
𝜽𝜽𝒐𝒐
Now consider the system with the PID unit in the forward path, but with the tachometer feedback
removed (with the PID module parameters K, Ti and Td set, K2=0, this will correspond to cascade
PID compensation).
Using 𝐺𝐺 = 𝐺𝐺𝑐𝑐 𝐺𝐺𝑝𝑝 =
𝐾𝐾𝐾𝐾𝑀𝑀 [1+
1
+𝑠𝑠𝑇𝑇𝑑𝑑 ]
𝑠𝑠𝑇𝑇𝑖𝑖
𝑠𝑠𝑠𝑠(1+𝑠𝑠𝜏𝜏𝑀𝑀 )
and 𝐻𝐻 = 𝐾𝐾𝑂𝑂 , the CLTF is given by 𝑇𝑇 = 𝐾𝐾𝑖𝑖
The equivalent unit-feedback transfer function 𝐺𝐺𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢 =
𝐺𝐺𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢 (𝑠𝑠) =
𝐾𝐾𝐾𝐾𝑜𝑜 𝐾𝐾𝑀𝑀 𝑇𝑇𝑑𝑑 [𝑠𝑠 2 +
1
1
𝑠𝑠+
]
𝑇𝑇𝑑𝑑
𝑇𝑇𝑖𝑖 𝑇𝑇𝑑𝑑
𝑇𝑇
1−𝑇𝑇
may be found, assuming
𝐺𝐺
1+𝐺𝐺𝐺𝐺
𝐾𝐾𝐾𝐾
𝐾𝐾𝐾𝐾
.
= 1 by:
(5-2)
𝑠𝑠 2 𝑁𝑁(1+𝑠𝑠𝜏𝜏𝑀𝑀 )
Equation (5-2) clearly shows that (a) the system ‘Type’ has been changed to Type 2, and (b) a pair
of zeros has been introduced. ie: the system will now have zero steady state error for both step and
ramp inputs. However, its transient response will depend on the location of the roots of the system
characteristic equation [ie: closed loop poles].
Experiment Procedure
Pre-lab: Please review Lab#1, Lab#2 and Lab#3, connect a basic angular position control system
with PID controller and cascade velocity feedback as shown in Figure 5-1. The lab equipments
layout is shown in Figure 1-6. All the +15V and -15V and 0V voltage will be connected in the lab
later. The power supply PS150E, servo-amplifier SA150D and DC motor DMC150-F are internal
connected. Please note that input pot IP150H and output pot OP150K must be cross connected
(referring Figure 1-11), make sure Ve is a voltage difference not a voltage sum. The reference
voltage of IP150H and OP150K is ±15V.
Expt. #1 Dc Motor Position Control With PID Compensation
Notes: Throughout the following experiments, it will be assumed that the op-amp and the preamp remain zeroed and balanced respectively and that the supplies to the input/output pots
are cross-connected so that the op-amp is the difference between the input and output position
signals. Check system is controllable and stable, then replace input pot with function
generator.
Set up the circuit shown in Figure 5.1. Set K2 to zero to eliminate the velocity feedback. Adjust the
function generator controls to obtain a square wave output of about 4 volts peak-to-peak,
symmetrical about the zero volt baseline, at approximately 0.4 Hz.
Notes: For the following each steps, record your observations (Stop/Run scope, using curser
measurement to get Peak time Tp, overshoot P. O., steady state error ∆𝜃𝜃𝜃𝜃. capture display, or
drawing at a blank paper, for your report), and comment on them.
1. Proportional Compensation: switch out the Integral (Ti=0) and Derivative (Td=0) paths, and
switch in only the Proportional path. Observe the change in 'step' (square-wave) response of the
39
angular-position output as the proportional compensator gain K is varied from 0.1 to 1.
Momentarily switch the input waveform to a triangular-wave and observe the change in the
"follower" (ramp) response as K is changed. (Let: K=0.1, 0.2)
2. Proportional-Integral Compensation*: Switch in the Integral path. Set the proportional gain
K=0.1, and observe the effect on the output responses for square wave and triangular wave input
when Ti is set to various values, Let ( 𝑇𝑇𝑖𝑖 = 0.5, 1, 10 ).
3. Proportional-Derivative Compensation*: With K=0.1, switch out the Integral path and switch
in the Derivative path instead. Observe the effect on the output responses for square wave and
triangular wave input when Td is set to various values. Decrease the proportional gain if necessary,
to reduce noise. Let ( 𝑇𝑇𝑑𝑑 = 2, 20 , 200𝑚𝑚𝑚𝑚 ).
4. Proportional-Integral-Derivative Compensation*: Next, switch in the Integral path again. The
compensation is now a "PID". Observe the effect on the 'step' (square-wave) response and
triangular-wave response when the gain K, Ti and Td are set to various values.
Let
a) (K=0.1, 𝑇𝑇𝑖𝑖 = 0.5, 𝑇𝑇𝑑𝑑 = 20 𝑚𝑚𝑚𝑚 ).
b) (K=0.1, 𝑇𝑇𝑖𝑖 = 10, 𝑇𝑇𝑑𝑑 = 20 𝑚𝑚𝑚𝑚 ).
c) (K=0.1, 𝑇𝑇𝑖𝑖 = 0.5 , 𝑇𝑇𝑑𝑑 = 200 𝑚𝑚𝑚𝑚 ).
d) (K=0.1, , 𝑇𝑇𝑖𝑖 = 10, 𝑇𝑇𝑑𝑑 = 200 𝑚𝑚𝑚𝑚 ).
Expt. #2 DC Motor Position Control With PID Compensation and Tachometer feedback
Cascade Compensation with Tachometer feedback: Velocity feedback compensation can be
introduced in addition to any of the cascade compensation schemes given in Expt#1,steps 1, 2, 3
and 4 above, by means of pot coefficient K2. Note that the tachometer feedback is now applied
directly to the preamplifier (PA150C, input#2) in an internal loop which is also called a "minor"
feedback loop. Observe the effect of increasing K2 in each of the above cases. Record your
observations and comment on them.
a) P+ Tach: (K=0.1, K2=0) ;(K=0.1, K2=0.1); (K=0.1, K2=0.2)
b) PI+Tach: (K=0.1, 𝑇𝑇𝑖𝑖 = 10 𝐾𝐾2 = 0) ; (K=0.1, 𝑇𝑇𝑖𝑖 = 10 𝐾𝐾2 = 0.1) ; (K=0.1, 𝑇𝑇𝑖𝑖 = 10 𝐾𝐾2 =
0.2)
Setting
1. P
a. Squire
f=200mhz
v=4v p-p
offset=0
b. Tran.
K, Ti, Td
K=0.1
P
PI
K=0.2
a. Step Response
Tp, P.O. , S.S. e
40
b. Ramp Response
Expt. #3 DC Motor Speed Control With PI Compensation
Set up the circuit shown in Figure 3.4. Replace K1(attenuator module) by PID module PID150Y.
Adjust the function generator controls to obtain a square wave output of about 8 volts peak-to-peak,
symmetrical about the zero volt baseline, at approximately 0.3 Hz. Set load at position #0,
a) P: (K=0.1, no Ti, no load. Capture image of step response.
b) PI: (K=0.1, 𝑇𝑇𝑖𝑖 = 0.1 ), no load. Capture image of step response.
Repeat for above a) and b) with load at #5.
Load at #0
Setting
a). P
b).P+I
K, Ti,
K=0.1
No Ti
K=0.1
Ti=0.1
Step Response
Load at # 5
Setting
K, Ti,
a). P
K=0.1
No Ti
b).P+I
Step Response
K=0.1
Ti=0.1
Experiment Results
Expt. #1
1). Derive the transfer Function 𝜃𝜃𝜃𝜃 (real position of DC motor)/ 𝜃𝜃𝜃𝜃 (desired position of DC motor)
from Figure 5.1 given K2=0.
2). In Expt.#1, draw a Root-Locus plot for each step 1,2, 3 and 4 using system parameters and the
value in the experiments. Comment on them.
3). In Expt.#1, Simulate block diagram Figure 5.1 for each step 1,2, 3 and 4 using system
parameters and the value in the experiments, compare it with the experimental results.
4). In Expt.#1, get step response of the transfer function from question #1 for each step 1,2, 3 and
4 using system parameters and the value in the experiments. Compare the results with Question #3
and experimental results.
Expt. #2
1). Derive the transfer Function 𝜃𝜃𝜃𝜃 (real position of DC motor)/ 𝜃𝜃𝜃𝜃 (desired position of DC motor)
from Figure 5.1 with velocity feedback K2.
2). In Expt.#2, Simulate block diagram Figure 5.1 with K2 using system parameters and the value
in the experiments of each case, compare them with the experimental results.
3). In Expt.#2, get step response of the transfer function from question #1 for each case. Compare
the results with Expt#2 Question #2 and experimental results.
41
Expt. #3
1). Derive the transfer Function V𝑜𝑜 (real speed of DC motor)/ V𝑑𝑑 (desired speed of DC motor)
from Figure 3.4. Run simulate.
2). Simulate “unit block diagram” from lab#3, Exp#4 with load torque TL, using system
parameters and the value in the experiments of each case, compare them with the experimental
results.
42
Appendix A: Connect Oscilloscope to MS Excel
When turn on oscilloscope, the desktop of computer will display :
This means the computer connected to Scope. Now link scope to Excel. Click ADD_INS, then first
Icon
Click
, click “Identify”:
to capture scope Image:
43
Appendix B: Summary of MS150 Data- DC System:
44